Предлагаемый манипулятор относится к манипуляторам, работающим в герметизированном объеме, и предназначен для дистанционного проведения манипуляционных.работ с предметами в герметизированном объеме вакуумной камеры или защитного бокса.
Известен манипулятор, работающий в герметизированном объеме (см. книгу М.И. Медникова «Вводы движения в вакуум», М., 1974, стр. 172-173 или авторское свидетельство №257232 по М.Кл. В25 21/00). Конструкция которого выполнена в виде комбинированного цельнометаллического ввода с встроенной трубчатой муфтой.
Манипулятор содержит корпус, в котором смонтирован привод поступательного движения исполнительного органа в виде винтового механизма и связывающего его с исполнительного органом штока с сильфонным компенсатором, привод вращательного движения исполнительного органа в виде задающего генератора, ведомого генератора и связующей из упругодеформированной трубы, закрепленной на гибкой диафрагме отделяющей рабочее пространство манипулятора от нерабочего, где шток с сильфонным компенсатором установлен внутри упругодеформируемой трубы привода вращательного движения и закреплен на гибкой диафрагме, а так же привод качательного движения исполнительного органа в виде системы рычагов связанных со штоком и исполнительным органом.
Данная конструкция манипулятора может обеспечить сложное перемещение объекта исполнительным органом посредством вращения вокруг вертикальной оси ввода, что достигается креплением перемещаемого объекта на ведомом кулачке трубчатой муфты, и поворот объекта на исполнительном органе вокруг горизонтальной оси, что обеспечивается с помощью дополнительного сильфонного механизма, поступательно перемещающийся шток который в вакууме связан рычажной системой с объектом и закреплен в подшипниковой опоре на кулачке муфты.
Размещение всей конструкции ввода на одном малогабаритном фланце позволяет рационально встроить в прогреваемую высоковакуумную аппаратуру.
Недостаток такого манипулятора - отсутствие в нем возвратно-поступательного вертикального перемещения предметного столика исполнительного органа и ограниченная зона его обслуживания герметизированного объема вакуумной камеры или защитного бокса.
Известен также манипулятор, работающий в герметизированном объеме (см. авторское свидетельство №1184669), конструкция которого выполнена в виде комбинированного цельнометаллического сильфонного ввода поступательного, качательного и вращательного движений исполнительного органа и рычажной системы раздвижных шарниров многократного параллелограмма, связующего винтовые механизмы ручного привода комбинированного сильфонного ввода поступательно-качательного и вращательного движений с исполнительным органом выполненным в виде радиально-упорного шарикоподшипника, внутреннее кольцо которого является предметным столиком и снабжено универсальным шарниром винтового толкателя вращательного движения столика.
Все устройство этого манипулятора смонтировано на фланце стенки вакуумной камеры или защитного бокса.
Данная конструкция манипулятора может обеспечить сложное перемещение объекта исполнительным органом посредством передачи и. формирования поступательно-качательного и вращательного движений в герметизированный объем вакуумной камеры, в стене которой смонтирован манипулятор, работающий в герметизированном объеме этой камеры или защитного бокса.
Однако перемещение (манипулирование) предметного столика, такого манипулятора, осуществляется. посредством большого количества раздвижных шарниров рычажной системы многократного параллелограмма, что значительно сказывается на его габаритах и оперативности исполнительного органа манипулятора.
Целью предполагаемого изобретения является уменьшение габаритов манипулятора и повышение оперативности качательного движения исполнительного органа работающего в герметизированном объеме вакуумной камеры или защитного бокса.
Для достижения этой цели известный манипулятор, имеющий тройную рычажную систему раздвижных шарниров многократного параллелограмма, связующую винтовые механизмы ручных приводов комбинированного сильфонного ввода движения с исполнительным органом манипулятора, выполненным в виде предметного столика, снабжен шаровой опорой привода качательного движения сильфонного ввода и одной рычажной системой раздвижных шарниров многократного параллелограмма, связующей винтовые механизмы ручных приводов комбинированного сильфонного ввода движения с исполнительным органом манипулятора.
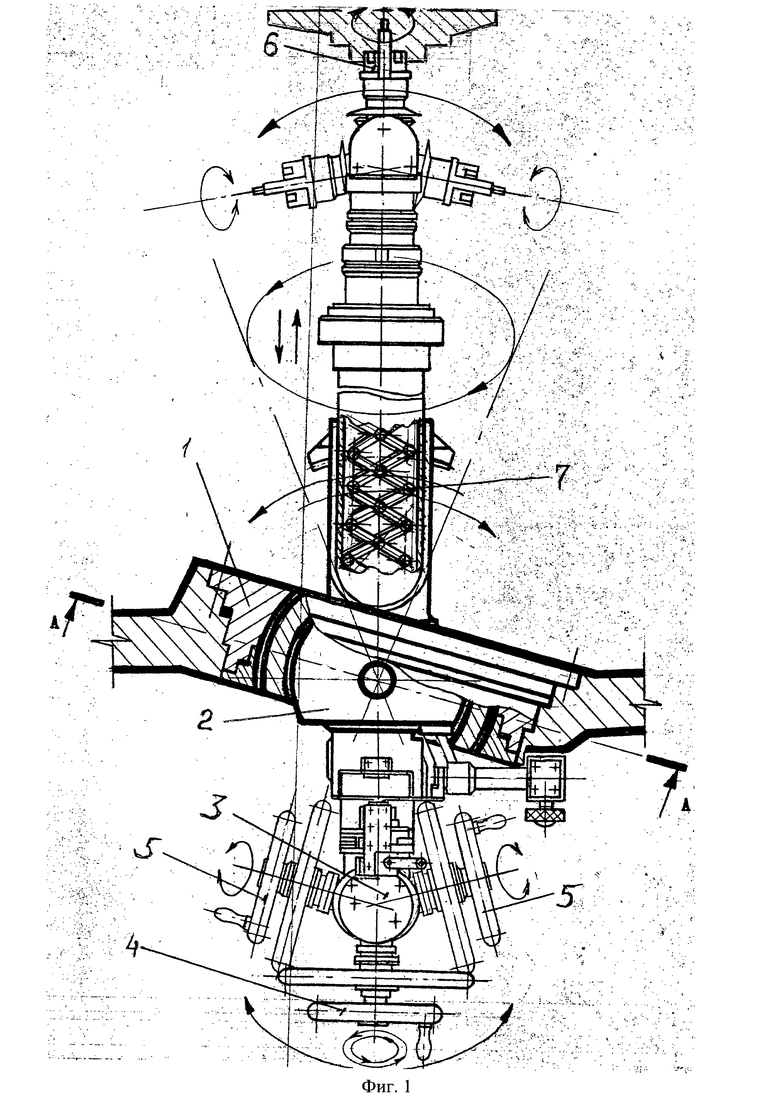
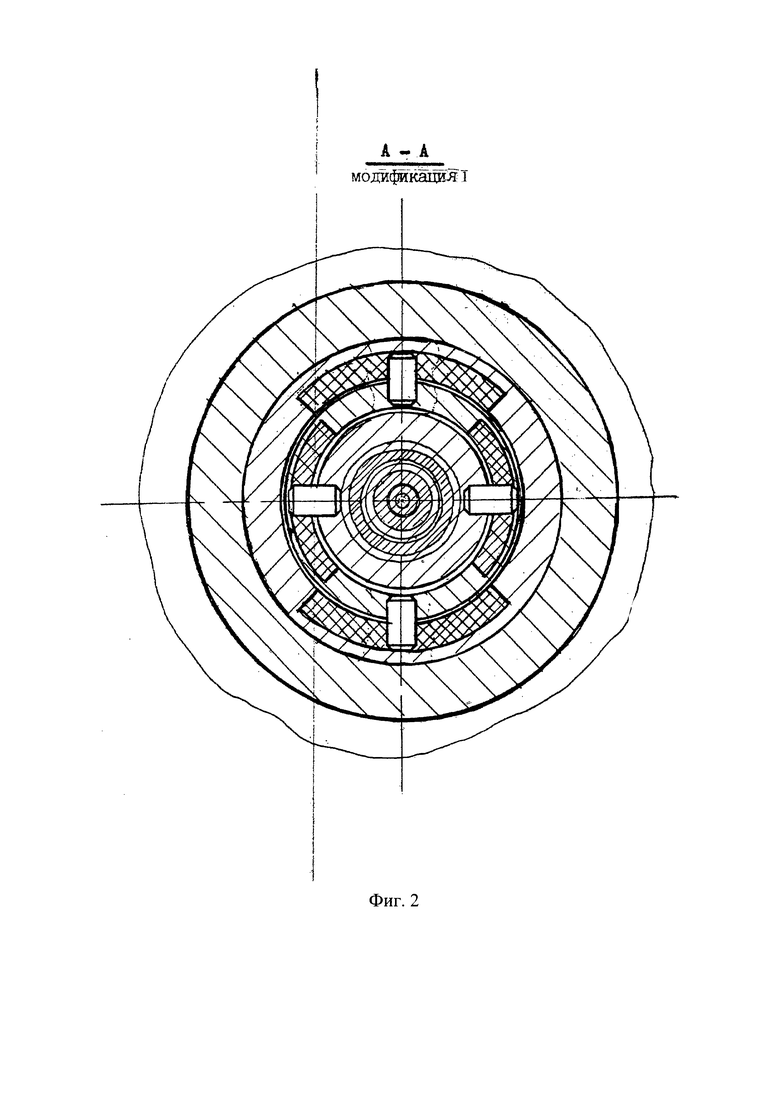
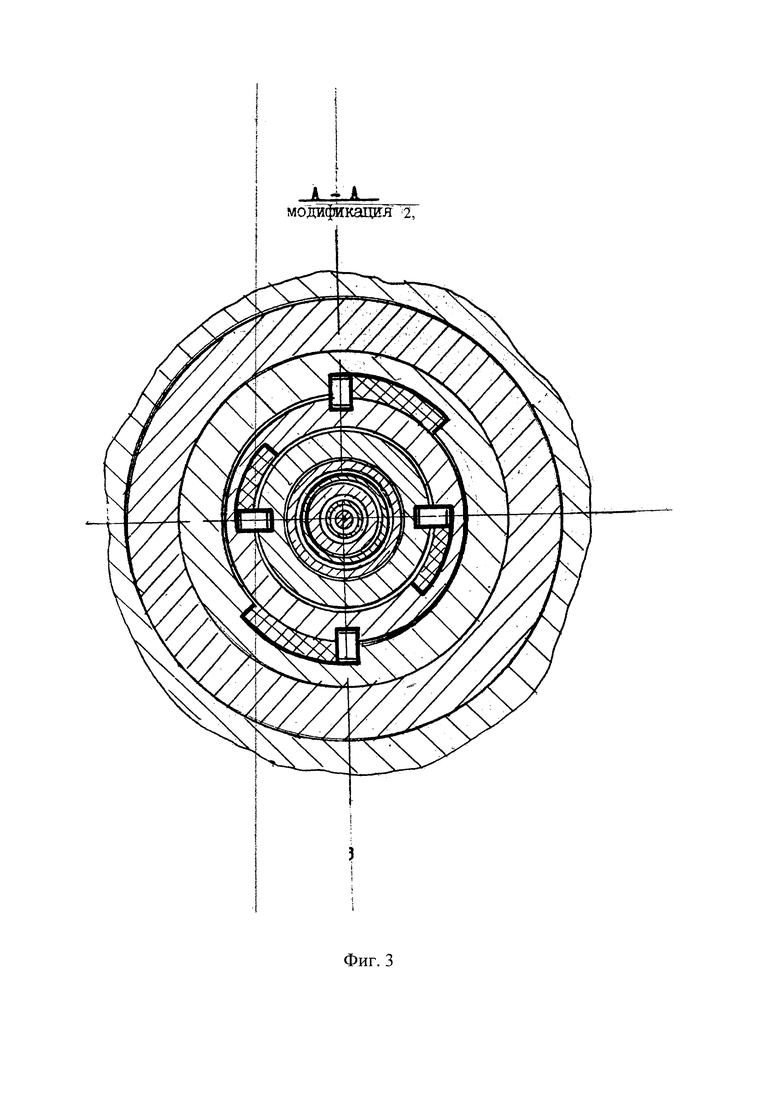
На чертеже изображен общий вид манипулятора работающего в герметизированном объеме фиг. 1, на фиг. 2-3 - модификации манипуляторов.
Манипулятор содержит крышку 1 вакуумной камеры или защитного бокса, в которой смонтирована шаровая опора 2 привода качательного 3, поступательного 4 и вращательного 5 движений исполнительного органа 6 и рычажную систему раздвижных шарниров 7, многократного параллелограмма, связующую винтовые механизмы ручных приводов комбинированного сильфонного ввода качательного 3, поступательного 4 и вращательного 5 движений с исполнительным органом 6 манипулятора, выполненным в виде предметного столика.
Все устройство смонтировано на фланце стенки вакуумной камеры.
Для осуществления передачи и формирования качательного, поступательного и вращательного движений в герметизированный объем вакуумной камеры, в стене которой смонтирован манипулятор, работающий следующим образом:
При качательном движении исполнительный орган 6 получает качательное перемещение от рукоятки привода качательного 3 движения сильфонного ввода. Посредством перемещения шаровой опоры 2.
При поступательном движении исполнительный орган 6 получает поступательное (вертикальное) перемещение от винтового механизма ручного привода комбинированного сильфонного ввода поступательного 4 движения, через рычажную систему раздвижных шарниров 7 многократного параллелограмма.
При вращательном движении исполнительный орган 6 получает вращательное движение предметного столика от винтового механизма ручного привода комбинированного сильфонного ввода вращательного движения 5 через рычажную систему раздвижных шарниров 7 многократного параллелограмма.
Все устройство смонтировано на крышке 1 вакуумной камеры или защитного бокса.
Наличие в манипуляторе шаровой опоры позволит увеличить оперативность качательного движения его исполнительного органа, а упрощенная рычажная система раздвижных шарниров многократного параллелограмма, телескопически связующая шаровую опору привода качательного движения и винтовые механизмы ручных приводов комбинированного сильфонного ввода движений с исполнительным органом, позволит значительно уменьшить масштабные габариты всего манипулятора и увеличить зону обслуживания его исполнительного органа на величину телесного угла герметичной шаровой опоры и кратное количество безлюфтовых шарниров многократного параллелограмма, момент кратного перемещения которого выгодно скажется на оперативности и точности работы всего манипулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2018 |
|
RU2708648C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2709280C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2705165C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2705166C1 |
| Манипулятор,работающий в герметизированном объеме | 1984 |
|
SU1184669A1 |
| Вакуумный манипулятор | 2018 |
|
RU2691168C1 |
| МАНИПУЛЯТОР С ВАКУУМНОЙ КАМЕРОЙ | 2018 |
|
RU2713999C1 |
| Вакуумный манипулятор | 2018 |
|
RU2691173C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691172C1 |
Изобретение относится к манипуляторам, работающим в герметизированном объеме вакуумной камеры или защитного бокса. Манипулятор закреплен на крышке в стене вакуумной камеры или защитного бокса и содержит исполнительный механизм в виде предметного столика и винтовые механизмы ручных приводов комбинированного сильфонного ввода качательного, поступательного и вращательного движений исполнительного органа. Манипулятор снабжен смонтированной в крышке герметичной шаровой опорой и рычажной системой раздвижных безлюфтовых шарниров многократного параллелограмма, телескопически связывающей шаровую опору и винтовые механизмы ручных приводов комбинированного сильфонного ввода качательного, поступательного и вращательного движений с исполнительном органом с обеспечением качательного движения исполнительного органа перемещением упомянутой герметичной шаровой опоры, а поступательного и вращательного движений исполнительного органа – перемещением винтовых механизмов приводов соответствующих движений через упомянутую рычажную систему. Манипулятор выполнен с возможностью обеспечения зоны обслуживания исполнительного органа в пределах величины телесного угла герметичной шаровой опоры. Изобретение обеспечивает уменьшение габаритов манипулятора и повышение оперативности качательного движения исполнительного органа. 3 ил.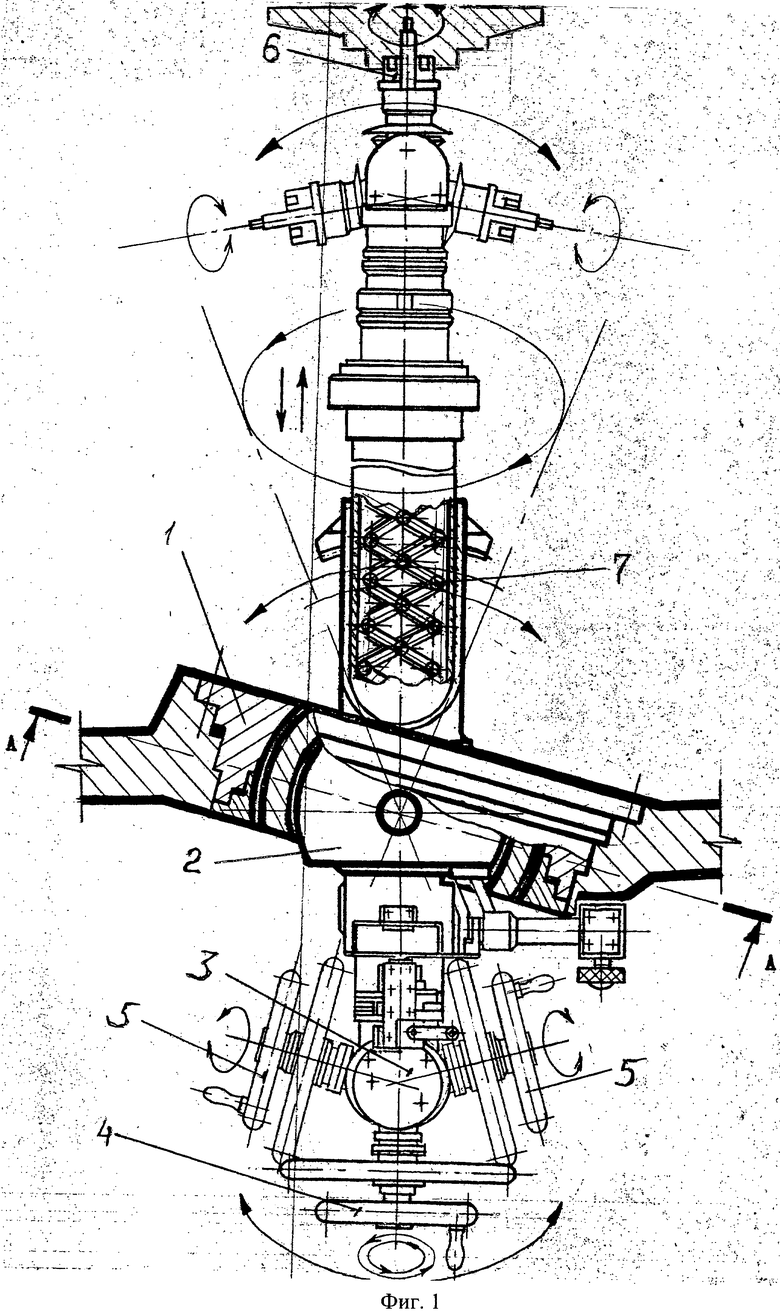
Манипулятор для работы в герметизированном объеме вакуумной камеры или защитного бокса, выполненный с возможностью закрепления на крышке в стене вакуумной камеры или защитного бокса и содержащий исполнительный механизм в виде предметного столика и винтовые механизмы ручных приводов комбинированного сильфонного ввода качательного, поступательного и вращательного движений исполнительного органа, отличающийся тем, что он снабжен смонтированной в упомянутой крышке герметичной шаровой опорой и рычажной системой раздвижных безлюфтовых шарниров многократного параллелограмма, телескопически связывающей шаровую опору и винтовые механизмы ручных приводов комбинированного сильфонного ввода качательного, поступательного и вращательного движений с исполнительном органом с обеспечением качательного движения исполнительного органа перемещением упомянутой герметичной шаровой опоры, а поступательного и вращательного движений исполнительного органа – перемещением винтовых механизмов приводов соответствующих движений через упомянутую рычажную систему, при этом манипулятор выполнен с возможностью обеспечения зоны обслуживания исполнительного органа в пределах величины телесного угла герметичной шаровой опоры.
| Манипулятор,работающий в герметизированном объеме | 1984 |
|
SU1184669A1 |
| Манипулятор, работающий в герметизированном объеме | 1989 |
|
SU1613321A2 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ИЗДЕЛИЯ НА СОВМЕСТНОЕ ВОЗДЕЙСТВИЕ ВИБРАЦИОННЫХ И ЛИНЕЙНЫХ УСКОРЕНИЙ | 2002 |
|
RU2239808C2 |
| US 10040190 B2, 07.08.2018. | |||

