Изобретение относится к машиностроению, в частности к манипуляторам и промышленным роботам, работающим в герметизированном объеме, и может быть использовано в технологических процессах изготовления электронных приборов и обработки веществ, осуществляемой в высоком вакууме, а также для осуществления ряда дистанционно управляемых технологических процессов.
Цель изобретения - повышение производительности за счет возможности работы с несколькими изделиями и повышение частоты технологических процессов за счет исключения попадания в зону обслуживания продуктов трения.
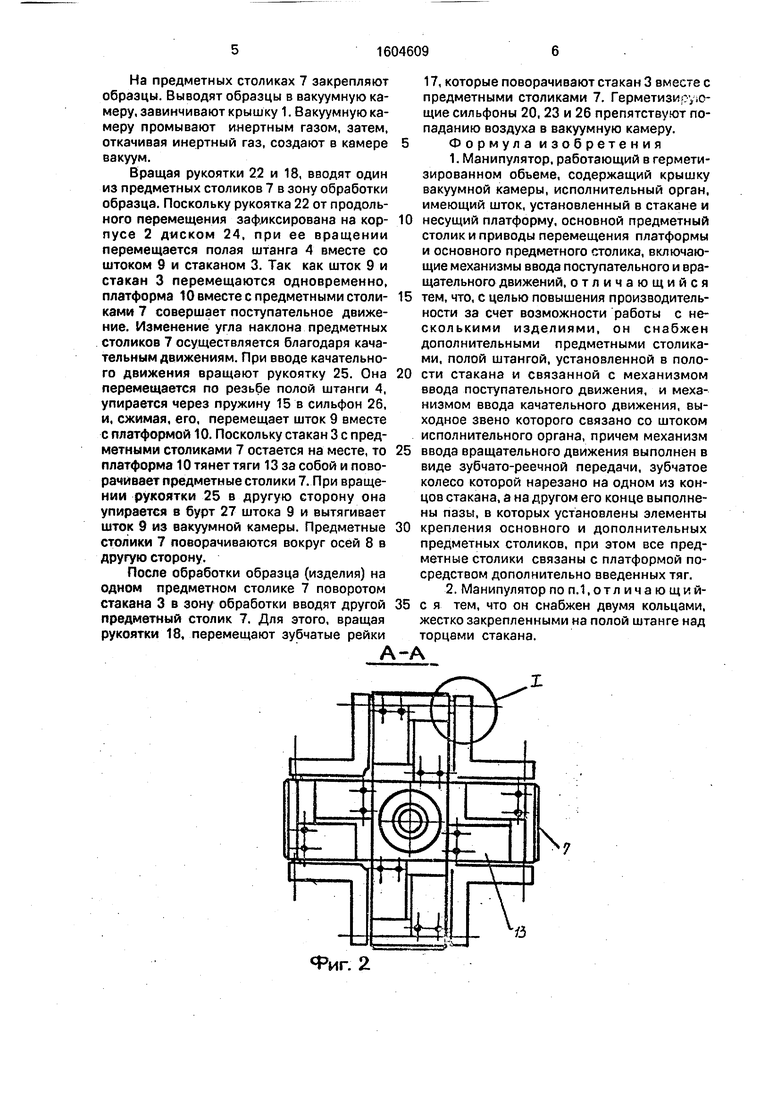
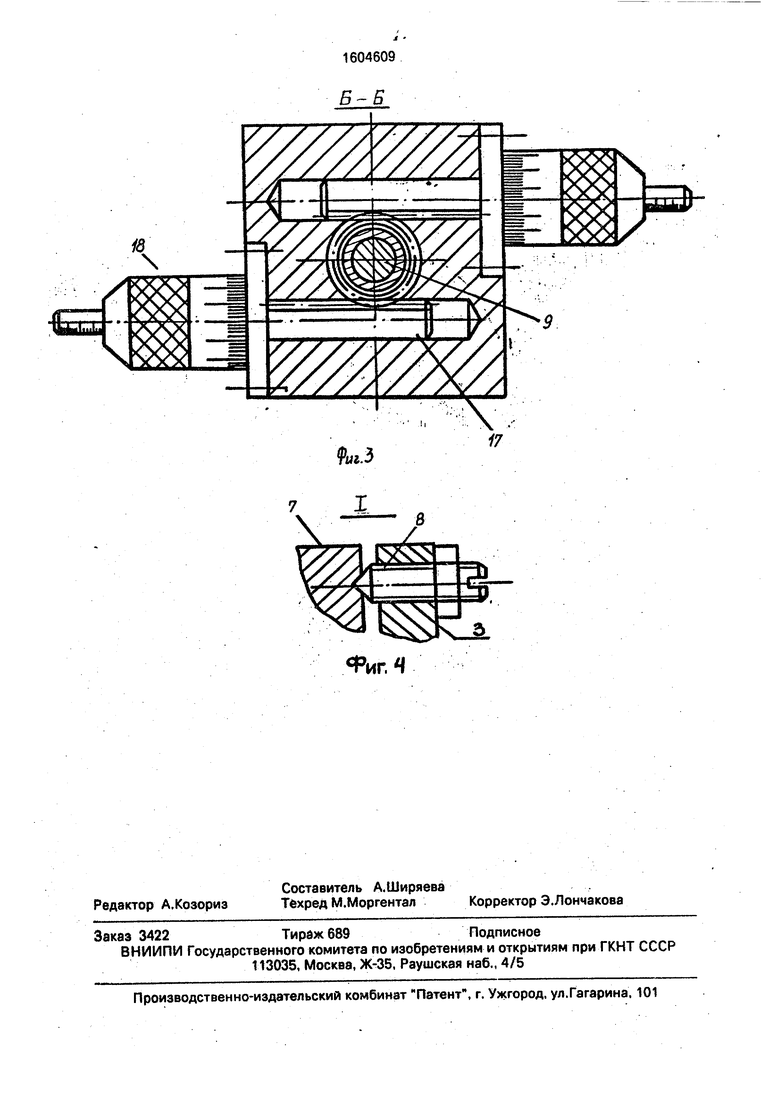
На фиг. 1 изображен манипулятор, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - узел на фиг. 2.
Манипулятор, работающий в герметизированном объеме, содержит крышку 1 вакуумной камеры, которая герметично соединена с корпусом 2, исполнительный орган, выполненный в виде стакана 3, свободно установленного на полой штанге 4 и зафиксированного на ней от продольного перемещения двумя кольцами 5 и 6, смонтированными на полой штанге 4 над торцами стакана 3. На торцовой части стакана 3 выполнены пазы для установки основного и дополнительных предметных столиков 7. Предметные столики установлены на элементах крепления, например на осях 8, ввинченных в пазы стакана 3, т.е. образуют со стаканом 3 шарнирное соединение. Оси 8 шарниров расположены в одной плоскости, перпендикулярной оси штока 9, на котором закреплена платформа 10с помощью колец 11 и 12.
Платформа 10 связана с каждь1м из предметных столиков 7 двумя расположенными один относительно другого крест-нарест тягами 13. Концы одной из тяг 13 кажой пары присоединены к низу платформы 10 и к верху предметного столика 7, а концы ругой тяги 13 этой пары присоединены,
аоборот, к верху платформы 10 и низу редметного столика 7. Шток 9 проходит внутри полой штанги 4, которая связана со током 9 пружинами 14 и 15. Стакан 3 связан с механизмом ввода вращательного
вижения, включающим зубчато-реечную передачу, зубчатое колесо 16 которой нарезано на конце стакана 3, установленного на корпусе 2, а две зубчатые рейки 17 установлены в корпусе 2 и на их концах выполнены
резьбы, на которые навинчены рукоятки 18. Рукоятки 18 закреплены от продольного перемещения на корпусе 2 прижимными дисками 19. На входящих из корпуса 2 концах зубчатых реек 17 выполнены герметизирующие сильфоны 20. Между сильфонами 20 и рукоятками 18 установлена пружина 21. Полая штанга 4 связана с механизмом ввода поступательного движения.
Механизм ввода поступательного движения состоит из рукоятки 22, установленной на выходе полой штанги 4 из корпуса 2, герметизирующего сильфона 23, прижимного диска 24, закрепленного с помощью винтов на корпусе 2. Рукоятка 22 выподнена с
внутренней резьбой, находящейся в зацеплении с резьбой на полой штанге 4. На эту же резьбу полой штанги 4 навинчена рукоятка 25 механизма ввода качательного движения, связанная через пружину 15,
герметизирующий сильфон 26 со штоком 9. На концах зубчатых реек 17, выходящих из рукояток 18, и конце штока 9, выходящем из рукоятки 25, нанесены деления для определения величины перемещения. На штоке 9
выполнен бурт 27.
Манипулятор работает следующим образом.
На предметных столиках 7 закрепляют образцы. Выводят образцы в вакуумную камеру, завинчивают крышку 1. Вакуумную камеру промывают инертным газом, затем, откачивая инертный газ, создают в камере 5 вакуум.
Вращая рукоятки 22 и 18, вводят один из предметных столиков 7 в зону обработки образца. Поскольку рукоятка 22 от продольного перемещения зафиксирована на кор- 10 пусе 2 дмском 24, при ее вращении перемещается полая штанга 4 вместе со штоком 9 и стаканом 3. Так как шток 9 и стакан 3 перемещаются одновременно, платформа 10 вместе с предметными столи- 15 ками 7 совершает поступательное движение. Изменение угла наклона предметных столиков 7 осуществляется благодаря кача- тельным движениям. При вводе качательно- го движения вращают рукоятку 25. Она 20 перемещается по резьбе полой штанги 4, упирается через пружину 15 в сильфон 26, и, сжимая, его, перемещает шток 9 вместе с платформой 10. Пос кол ь ку ста ка н 3 с п ред- метными столиками 7 остается на месте, то 25 платформа 10 тянет тяги 13 за собой и поворачивает предметные столики 7. При вращении рукоятки 25 в другую сторону она упирается в бурт 27 штока 9 и вытягивает шток 9 из вакуумной камеры. Предметные 30 столики 7 поворачиваются вокруг осей 8 в другую сторону.
После обработки образца (изделия) на одном предметном столике 7 поворотом
17, которые поворачивают стакан 3 вместе с предметными столиками 7. Герметизирующие сильфоны 20, 23 и 26 препятствуют попаданию воздуха в вакуумную камеру. Формула изобретения
1.Манипулятор, работающий в герметизированном объеме, содержащий крышку вакуумной камеры, исполнительный орган, имеющий шток, установленный в стакане и несущий платформу, основной предметный столик и приводы перемещения платформы и основного предметного столика, включающие механизмы ввода поступательного и вращательного движений, отличающийся тем, что, с целью повышения производительности за счет возможности работы с не- сколькими изделиями, он снабжен дополнительными предметными столиками, полой штангой, установленной в полости стакана и связанной с механизмом ввода поступательного движения, и механизмом ввода качательного движения, выходное звено которого связано со штоком исполнительного органа, причем механизм ввода вращательного движения выполнен в виде зубчато-реечной передачи, зубчатое колесо которой нарезано на одном из концов стакана, а на другом его конце выполнены пазы, в которых установлены злементы крепления основного и дополнительных предметных столиков, при зтом все предметные столики связаны с платформой посредством дополнительно введенных тяг.
2.Манипулятор по п.1,отл ича ю щийстакана 3 в зону обработки вводят другой 35 с я тем, что он снабжен двумя кольцами, предметный столик 7. Для этого, вращая рукоятки 18, перемещают зубчатые рейки
жестко закрепленными на полой штанге над торцами стакана.
17, которые поворачивают стакан 3 вместе с предметными столиками 7. Герметизирующие сильфоны 20, 23 и 26 препятствуют попаданию воздуха в вакуумную камеру. Формула изобретения
1.Манипулятор, работающий в герметизированном объеме, содержащий крышку вакуумной камеры, исполнительный орган, имеющий шток, установленный в стакане и несущий платформу, основной предметный столик и приводы перемещения платформы и основного предметного столика, включающие механизмы ввода поступательного и вращательного движений, отличающийся тем, что, с целью повышения производительности за счет возможности работы с не- сколькими изделиями, он снабжен дополнительными предметными столиками, полой штангой, установленной в полости стакана и связанной с механизмом ввода поступательного движения, и механизмом ввода качательного движения, выходное звено которого связано со штоком исполнительного органа, причем механизм ввода вращательного движения выполнен в виде зубчато-реечной передачи, зубчатое колесо которой нарезано на одном из концов стакана, а на другом его конце выполнены пазы, в которых установлены злементы крепления основного и дополнительных предметных столиков, при зтом все предметные столики связаны с платформой посредством дополнительно введенных тяг.
2.Манипулятор по п.1,отл ича ю щийс я тем, что он снабжен двумя кольцами,
с я тем, что он снабжен двумя кольцами,
жестко закрепленными на полой штанге над торцами стакана.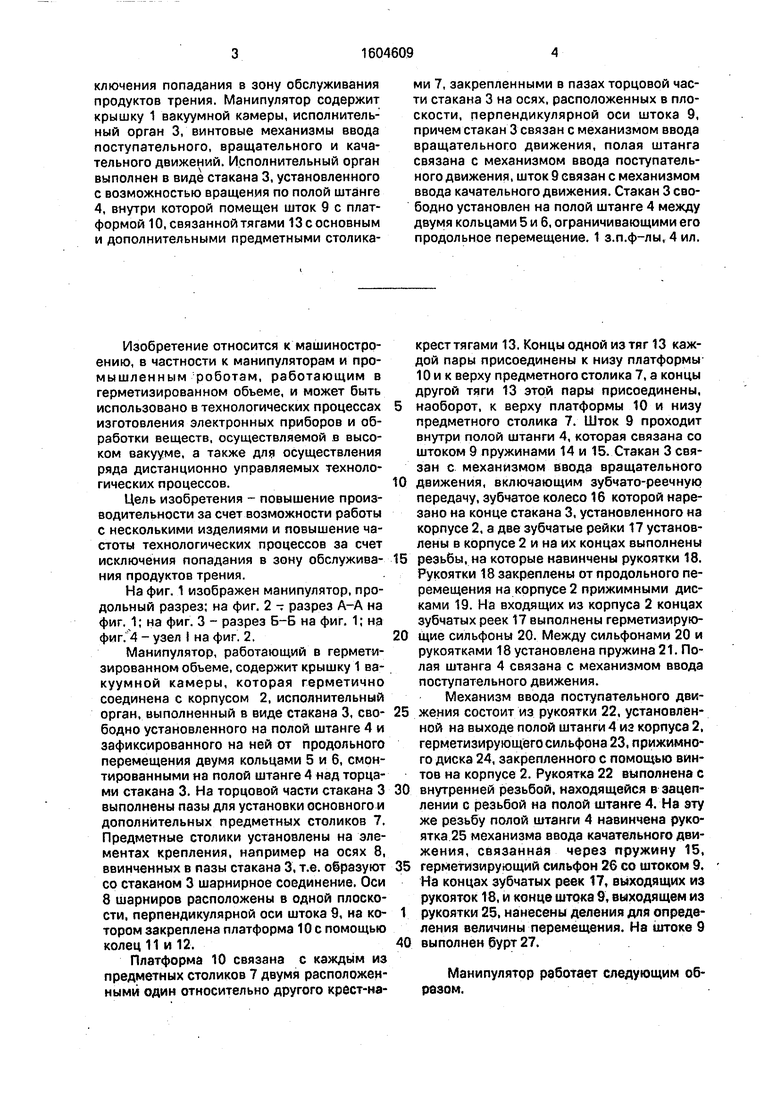
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР С ВАКУУМНОЙ КАМЕРОЙ | 2018 |
|
RU2713999C1 |
| Вакуумный манипулятор | 2018 |
|
RU2691168C1 |
| Вакуумный манипулятор | 2018 |
|
RU2691173C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2018 |
|
RU2708648C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2709280C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2728274C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2705165C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2705166C1 |
| Манипулятор,работающий в герметизированном объеме | 1984 |
|
SU1184669A1 |
| Манипулятор, работающий в герметизированном объеме | 1989 |
|
SU1613321A2 |
Изобретение относится к машиностроению, в частности к манипуляторам и промышленным роботам, работающим в герметизированном объеме, и может быть использовано в технологических процессах изготовления электронных приборов и обработки радиактивных, токсичных и взрывчатых веществ, осуществляемых в высоком вакууме, а также для осуществления ряда дистанционно-управляемых технологических процессов в открытом космосе. Целью изобретения является повышение производительности за счет возможности работы с несколькими изделиями и повышение чистоты технологических процессов за счет исключения попадания в зону обслуживания продуктов трения. Манипулятор содержит крышку 1 вакуумной камеры, исполнительный орган 3, винтовые механизмы ввода поступательного, вращательного и качательного движений. Исполнительный орган выполнен в виде стакана 3 установленного с возможностью вращения по полой штанге 4, внутри которой помещен шток 9 с платформой 10, связанной тягами 13 с основным и дополнительными предметными столиками 7, закрепленными в пазах торцовой части стакана 3 на осях, расположенных в плоскости, перпендикулярной оси штока 9, причем стакан 3 связан с механизмом ввода вращательного движения, полая штанга 4 связана с механизмом ввода поступательного движения, шток 9 связан с механизмом ввода качательного движения. Стакан 3 свободно установлен на полой штанге 4 между двумя кольцами 5 и 6, ограничивающими его продольное перемещение. 1 з.п. ф-лы, 4 ил.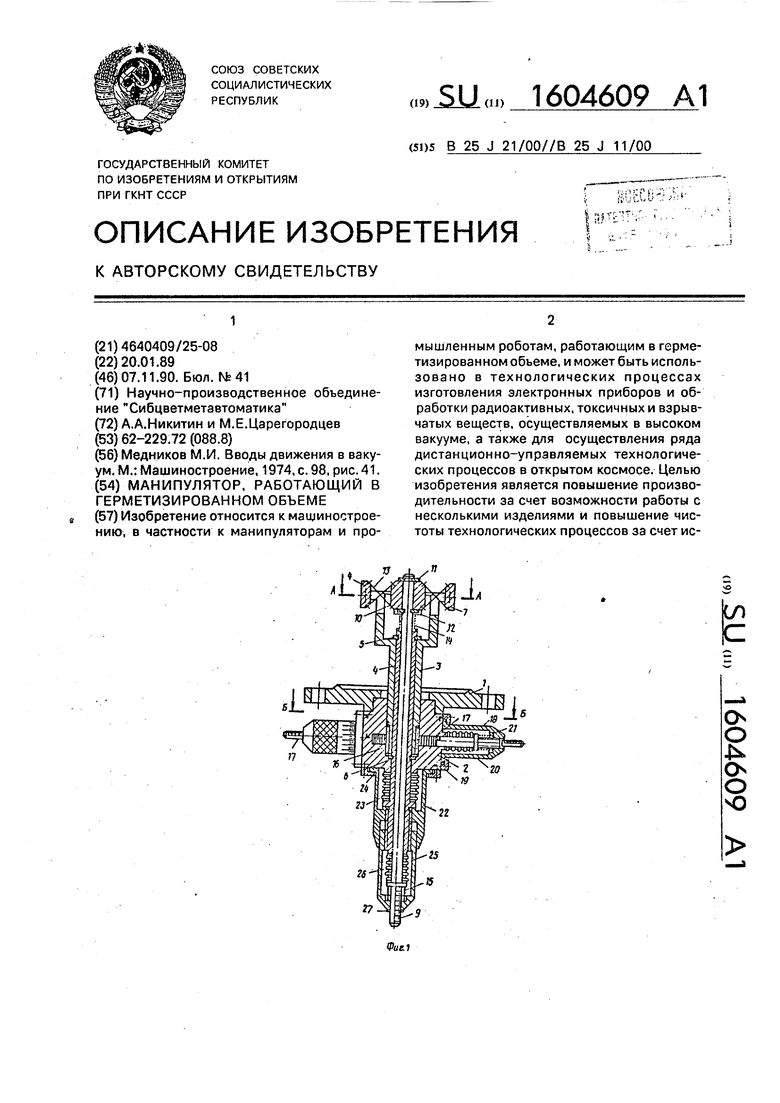
Фиг. 2
А-А
и
Б Б
Фиг. ч
k
| Медников М.И | |||
| Вводы движения в вакуум | |||
| М.: Машиностроение, 1974,с.98 | |||
| Механический грохот | 1922 |
|
SU41A1 |
