Предлагаемое изобретение относится к вакуумной технике, а именно, к конструкции манипуляторов, работающих в вакууме.
Известен манипулятор, работающий в герметизированном объеме (см. а.с. №1274922 М.кл. 4 B25J 21/00), содержащий корпус, в котором смонтированы привод поступательного движения исполнительного органа в виде винтового механизма и связывающего его с исполнительным органом штока с сильфонным компенсатором, привод вращательного движения, состоящий из упруго-деформируемой трубы, закрепленной на упругой диафрагме, отделяющей рабочее пространство манипулятора от нерабочего, задающего и ведомого генераторов, привод качательного движения в виде системы рычагов, связанных со штоком и исполнительным органом. Шток с сильфонным компенсатором установлен внутри упруго-деформируемой трубы, закреплен на гибкой диафрагме и снабжен двумя наружными гибкими диафрагмами, расположенными параллельно друг другу и установленными со смещением относительно гибкой диафрагмы упруго-деформируемой трубы, образуя компенсирующую герметичную полость, которая соединена с вакуумной контролирующей аппаратурой.
Наиболее близким по технической сущности к предлагаемому изобретению (прототипом) является манипулятор, работающий в герметизированном объеме (см. книгу М.И. Медникова «Вводы движения в вакуум» М., 1974 г. с. 98-100), выполненный в виде комбинированного сильфонного ввода поступательного и качательного движений, с помощью которого можно передать размещенному в вакуумной камере предметному столику поступательное вертикальное перемещение, горизонтальное перемещение в двух взаимно перпендикулярных направлениях. К фланцу, герметично установленному на вакуумной камере, герметично приварен стакан и диск, к которому приварена гирлянда из двух сильфонов, к которой в нижней ее части приварен опорный стакан, закрепленный на фланце юстировочного механизма, который крепится на плите.
Внутри стакана размещен сильфонный ввод поступательного движения, состоящий из двух последовательно сваренных сильфонов, один из которых приваривается к стакану, а другой закреплен на пробке, в которую ввернуты в вакууме и в атмосфере. Штоки соединены с маховиком передачей винт-гайка.
Таким образом, вертикальные перемещения предметного столик манипулятора осуществляются за счет движения плиты с юстировочным механизмом. Горизонтальные перемещения предметного столика создаются при вращении маховиков.
Технический результат, обеспечиваемый изобретением, заключается в повышении надежности герметизации вакуумной камеры.
Указанный технический результат достигается тем, что в вакуумном манипуляторе, содержащем вакуумную камеру с крышкой, исполнительный орган и сильфонный механизм ввода движений в камеру, сильфоны ввода движений разделены между собой герметичной полостью, образованной в крышке вакуумной камеры, которая соединена с источником вакуума.
Разделение сильфонов механизмов ввода движений герметичной полостью и соединение ее с источником вакуума позволит повысить надежность работы манипулятора за счет удаления газонатекания среды через сильфоны, контактирующие с вакуумной средой.
Известен герметичный ввод в вакуумную камеру с образованием между герметизирующими элементами замкнутой полости (см. а.с. №931461 М.кл. 4 B25J 21/00), соединенной с вакуумной контролирующей аппаратурой. Такое техническое решение позволяет контролировать степень герметичности ввода. Соединение полости в заявляемом решении с источником вакуума позволяет повысить надежность герметизации за счет откачки газа через сильфоны, что является новым эффектом. Таким образом, предлагаемое техническое решение обладает признаком «существенные отличия».
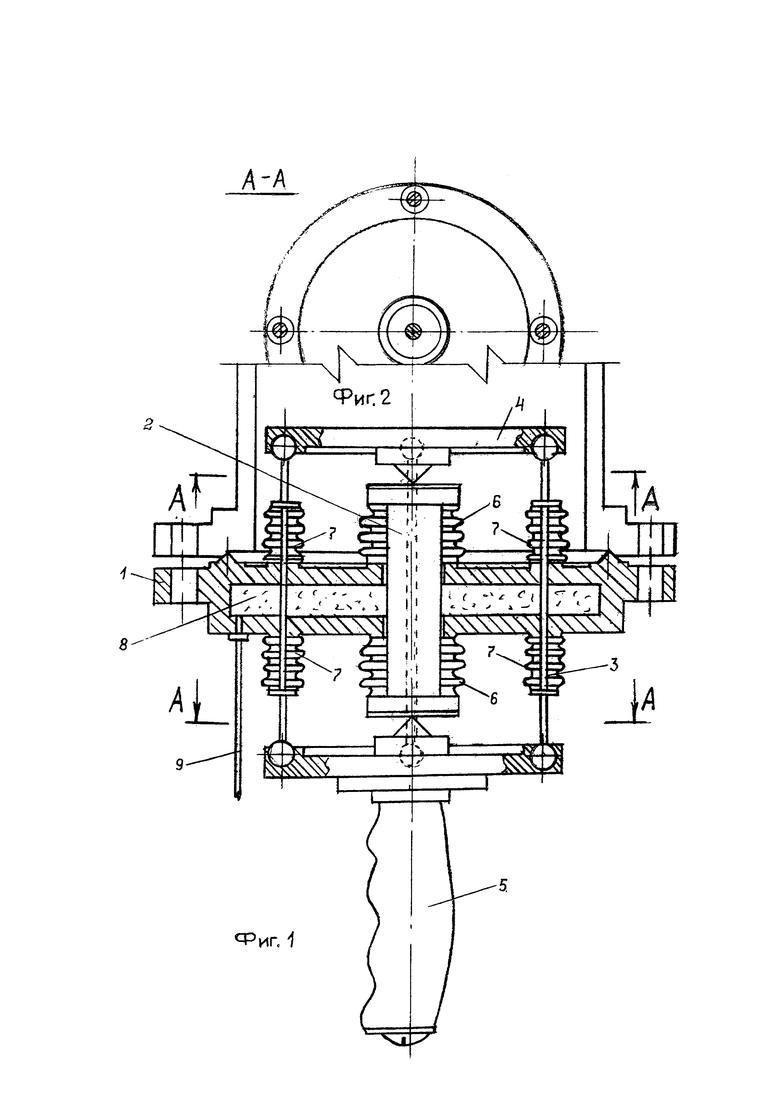
На фиг. 1 изображен общий вид предлагаемого манипулятора. На фиг. 2 - разрез А-А на фиг. 1
Вакуумный манипулятор содержит крышку 1 вакуумной камеры, на которой смонтирован механизм ручного привода сильфонного ввода поступательного 2 и качательного 3 движений исполнителного органа 4 (предметного столика), связывающий последний с рукояткой управления 5 манипулятора через крышку 1 вакуумной камеры. Сильфоны 6 и 7 механизма ручного привода сильфонного ввода разделены между собой герметичной полостью 8, образованной в крышке 1 вакуумной камеры и соединенной каналом 9 с вакуумным насосом 9на чертеже не показан).
Вакуумный манипулятор работает следующим образом.
При поступательном движении исполнительный орган 4 получает перемещение от рукоятки управления 5 привода 2 сильфонного ввода поступательного движения. Сильфоны 6, разделенные между собой полостью 8, герметизируют передачу поступательного движения исполнительному органу 4 и отделяют рабочее пространство манипулятора от (вакуумированный объем) от нерабочего.
При качательном движении исполнительный орган получает движение от рукоятки 5 привода сильфонного ввода качательного 3 движения. Сильфоны 7, разделенные между собой полостью 8 герметизируют передачу качательного движения исполнительному органу 4.
Газонатекание в полость 8 через сильфоны ликвидируется путем откачки его вакуумным насосом через канал 9.
Таким образом, использование предполагаемого изобретения позволяет значительно повысить герметичность и, тем самым, надежность ввода движений в вакуумную камеру, что позволит более качественно выполнять в камере технологические операции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный манипулятор | 2018 |
|
RU2691168C1 |
| МАНИПУЛЯТОР С ВАКУУМНОЙ КАМЕРОЙ | 2018 |
|
RU2713999C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2018 |
|
RU2708648C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2709280C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2728274C1 |
| Манипулятор, работающий в герметизированном объёме | 2018 |
|
RU2688075C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2705165C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2705166C1 |
| Манипулятор, работающий в герметизированном объеме | 1989 |
|
SU1604609A1 |
| Манипулятор,работающий в герметизированном объеме | 1984 |
|
SU1184669A1 |
Изобретение относится к вакуумной технике и может быть использовано в конструкциях манипуляторов с вакуумной камерой, предназначенных для выполнения технологических операций в вакууме. Манипулятор содержит исполнительный орган, выполненный с возможностью поступательного и качательного движений посредством ручного привода с сильфонами. Вакуумная камера выполнена с крышкой, имеющей герметичную полость, соединенную с источником вакуума. Ручной привод представляет собой рукоятку управления, связанную с исполнительным органом сильфонами, которые разделены между собой упомянутой герметичной полостью крышки. В результате обеспечивается повышение надежности герметизации вакуумной камеры. 1 ил.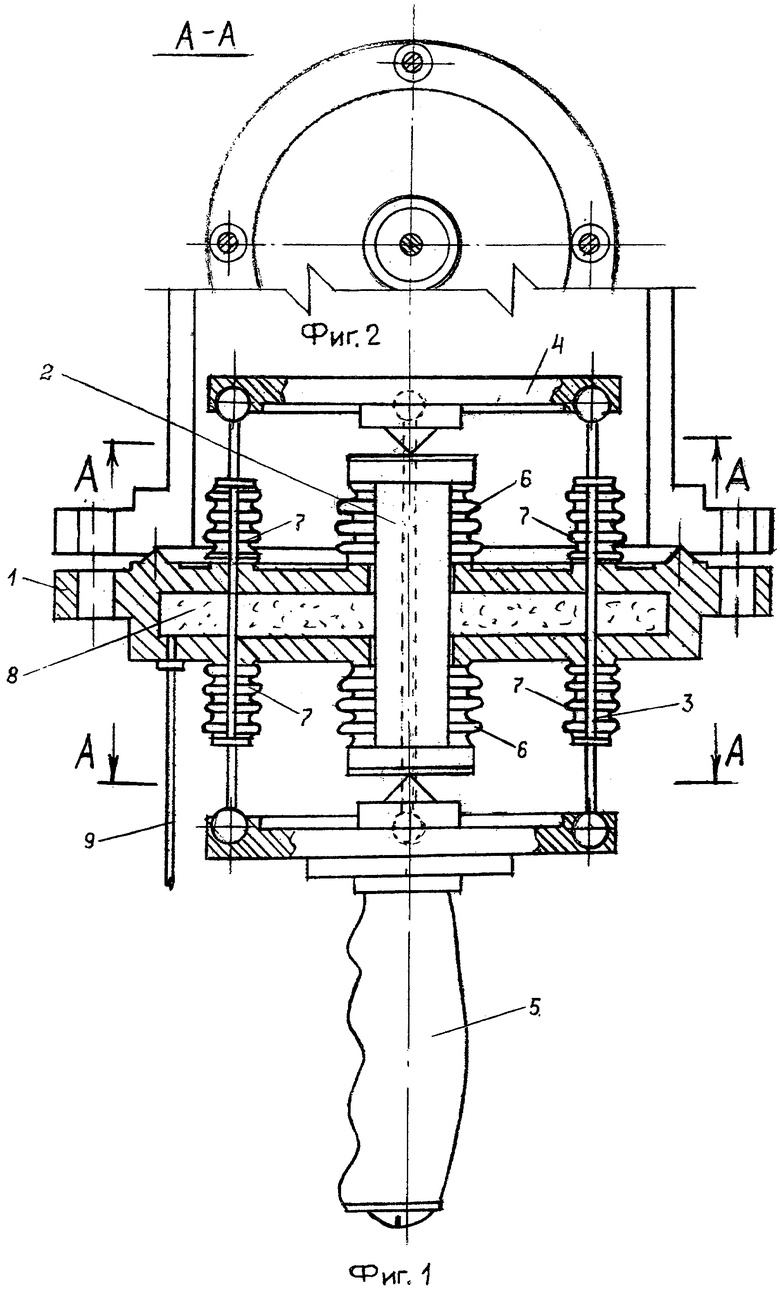
Манипулятор с вакуумной камерой для выполнения технологических операций в вакууме, содержащий исполнительный орган, выполненный с возможностью поступательного и качательного движений посредством ручного привода с сильфонами, отличающийся тем, что вакуумная камера выполнена с крышкой, имеющей герметичную полость, соединенную с источником вакуума, а ручной привод поступательного и качательного движений исполнительного органа выполнен в виде рукоятки управления, связанной с исполнительным органом сильфонами, которые разделены между собой упомянутой герметичной полостью крышки.
| МЕДНИКОВ М.И., Вводы движения в вакуум, М.,Машиностроение, 1974, сс.98-100, рис.42 | |||
| Вакуумный манипулятор | 1990 |
|
SU1754442A1 |
| Вакуумный манипулятор | 1988 |
|
SU1668132A1 |
| Вакуумный манипулятор | 1988 |
|
SU1548046A1 |
| WO 1992005922 A1, 16.04.1992. | |||

