Изобретение относится машиностроению, в частности к манипуляторам, работающим в герметизированном объеме, и может быть использовано в технологических процессах изготовления электронных приборов и.т.п.
Цель изобретения - повышение точности позиционирования за счет увеличения жесткости конструкции и демпфирующей способности,
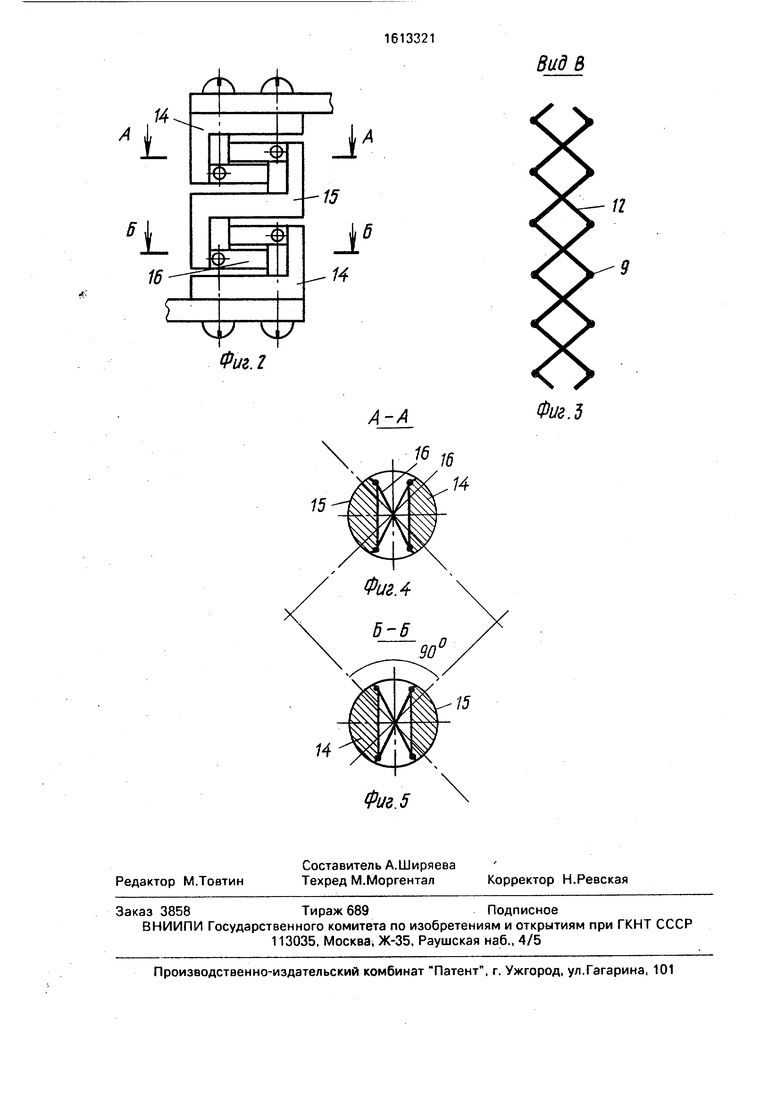
На фиг, 1 изображен манипулятор, общий вид; на фиг.2 - упругий шарнир; на фиг,3 - вид В на фиг,1; на фиг,4 - сечение А-А на фиг,2; на фиг,5 - сечение Б-Б на фиг,2.
Манипулятор содержит крышку 1 вакуумной камеры, на которой смонтированы винтовые механизмы ввода поступательно- качательного2 и вращательного 3 движений предметного столика 4 исполнительного органа, включающего три шарнирных многократных параллелограмма 5, винтовой толкатель б, универсальный шарнир 7 и платформу 8. Платформа 8 выполнена в виде радиально-упорного подшипника, внутреннее кольцо которого является предметным столиком 4 и связано посредством дополнительных упругих 9 и универ- 7 шарниров с центральным шарнирным многократным параллелограммом 5, а наружное кольцо кинематически связано с остальными диаметрально расположенными шарнирными многократными параллелограммами 5, которые связаны с винтовыми механизмами ввода поступа- тельно-качательного движения 2, При этом центральное и диаметрально расположенные шарнирные многократные параллелограммы 5 расположены в перпендикулярных плоскостях.
Предметный столик 4 снабжен осевым выступом, пропуш,емнымчере,з платформу 8 и выполненным с глухим отверстием 10. По цилиндрической поверхности отверстия 10 пропущена винтовая канавка, в которую введен ви,нтовой выступ 11 на винтовом толкателе 6. Винтовой толкатель 6 соединен с универсальным шарниром 7 с центральным шарнирным многократным параллелограммом 5. Звенья 12 всех шарнирных многократных параллелограммов 5 и звенья 13 универсального шарнира 7 соединены между собой упругими шарнирами 9. Каждый из
упругих шарниров 9 содержит два торцовых элемента 14, имеющих Г-образное сечение, и промежуточный элемент 15. Торцовые элементы 14 каждого упругого шарнира 9 5 связаны с промежуточным элементом 15 двумя парами пружин 16. Пружину 16 каждой пары взаимно перпендикулярны.
Все устройство смонтировано на фланце стенки вакуумной камеры.
0 Манипулятор работает следующим образом.
При поступательно-качательном движении предметный столик 4 получает поступательное (вертикальное) или качательное
5 перемещение от винтовых механизмов ввода поступательно-качательного движения 2, через диаметрально расположенные шарнирные многократные параллелограммы 5. При поступательном движении рукоятки
0 обоих механизмов ввода 2 вращают одновременно с одинаковой скоростью. При необходимости наклона предметного столика 4 вращают одну из рукояток механизмов ввода 2.
5Для осуществления вращательного движения предметного столика 4 вращают рукоятки механизма ввода 3, при этом центральный шарнирный многократный параллелограмм 5 складывается (или раскла0 дывается). Винтовой толкатель 6 совершает поступательное движение и его винтовой выступ 11, перемещаясь по винтовой канавке отверстия 10, вращает предметный столик 4.
5 Фор мула изобретения
Манипулятор, работающий в герметизированном объеме,по авт.св. № 1484725, отличающийся тем, что, с целью повышения точности позиционирования за
0 счет увеличения жесткости конструкции и демпфирующей способности, каждый из дополнительных упругих шарниров и из шарниров, связывающих звенья шарнирных многократных параллелограммов, снабжен
5 второй парой взаимно перпендикулярно расположенных пружин и промежуточным элементом, установленным между парами пружин, при этом все пружины связаны с торцовыми элементами этого шарнира, а
0 центральный и диаметрально расположенные шарнирные многократные параллелограммы установлены во взаимно перпендикулярных плоскостях.
Вид В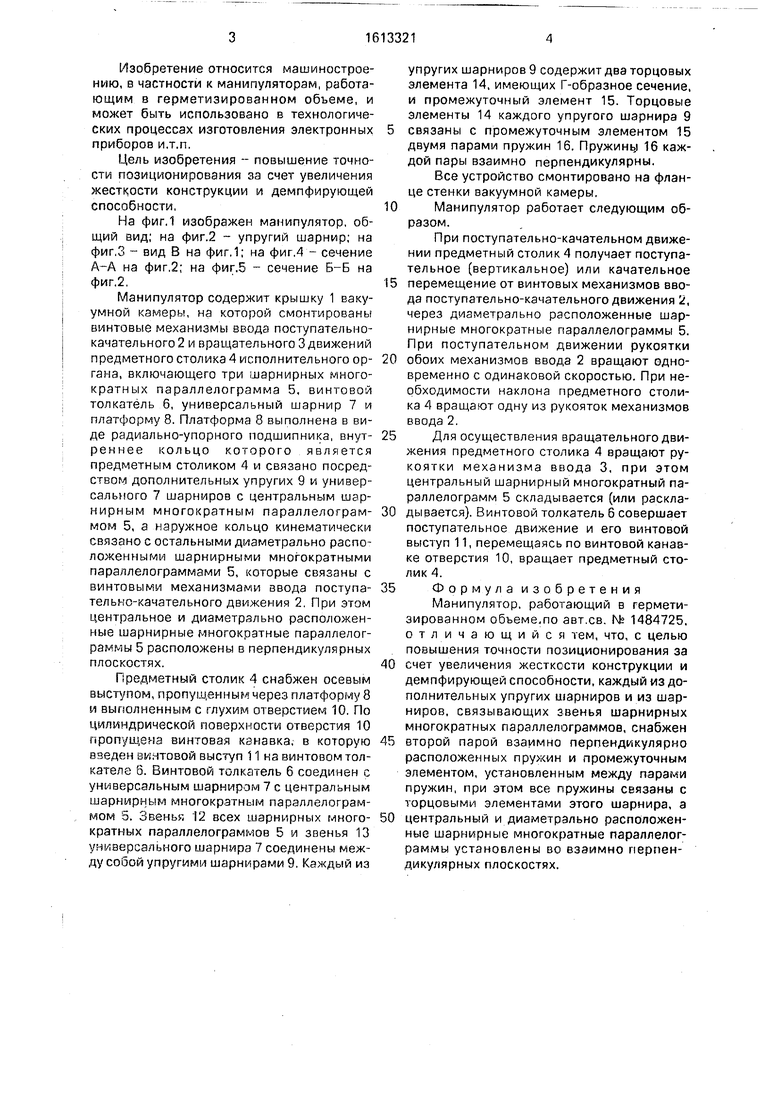
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2705165C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2705166C1 |
| Манипулятор,работающий в герметизированном объеме | 1984 |
|
SU1184669A1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2018 |
|
RU2708648C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2709280C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2728274C1 |
| Манипулятор, работающий в герметизированном объеме | 1989 |
|
SU1604609A1 |
| Манипуляторная камера | 1990 |
|
SU1745546A1 |
| Баллистический манипулятор | 2018 |
|
RU2686166C1 |
| БАЛЛИСТИЧЕСКИЙ МАНИПУЛЯТОР | 2019 |
|
RU2720756C1 |
Изобретение относится к машиностроению и может быть использовано в технологических процессах изготовления электронных приборов для обработки радиоактивных токсичных взрывчатых веществ, осуществляемых в высоком вакууме, а также для осуществления ряда дополнительных работ в открытом космосе. Целью изобретения является повышение точности позиционирования за счет увеличения жесткости конструкции и демпфирующей способности. Манипулятор, работающий в герметизированном объеме, содержит крышку 1 вакуумной камеры, механизмы ввода поступательно-качательного 2 и вращательного 3 движений предметного столика 4 и исполнительный орган, включающий три шарнирных многократных параллелограмма 5. Диаметрально расположенные многократные параллеграммы связывают механизм 2 ввода поступательно-качательного движений с платформой 8 в виде радиально-упорного подшипника, внутреннее кольцо которого является предметным столиком 4. Причем диаметрально расположенные и центральный шарнирные многократные параллелограммы 5 установлены во взаимно перпендикулярных плоскостях. Каждый из упругих шарниров 9, соединяющих звенья шарнирных многократных параллелограммов 5, и каждый из дополнительных упругих шарниров 9 состоит из двух торцовых элементов, г-образного сечения и промежуточного элемента, связанных между собой пружинами, установленными перпендикулярно друг другу. 5 ил.
14 А I
61 16
Н
Фиг. 2
14
A-A
Фие.5
Фиъ.б
| Авторское свидетельство СССР № 1484725.кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
