Предлагаемое решение относится к области информационных технологий, а именно к автономным системам управления подвижных объектов (наземных подвижных объектов, судов и т.п.), находящихся в особо сложных навигационных условиях движения.
Известен распределённый информационно-управляющий комплекс подвижных объектов (патент на изобретение России № 2232377, заявлен 25.09.2003 года), предназначенный для решения задач навигации, управления и наведения подвижных нежестких объектов (летательных аппаратов, наземных подвижных объектов, судов и т.п.).
Известный комплекс содержит взаимосоединенные входами-выходами по магистрали информационного обмена систем радиотехнические средства навигации, обзорно-прицельные средства, системы опознавания образов, инерциальные датчики и системы, воздушные датчики и системы, индикационно-управляющие устройства, вычислительную систему комплекса. Последняя включает в себя взаимосоединенные по магистрали вычислительного информационного обмена блок формирования параметров состояния, блок комплексной обработки информации, блок ввода-вывода и управления информационным обменом, другой вход-выход которого является входом-выходом вычислительной системы комплекса.
Распределённый информационно-управляющий комплекс дополнительно снабжен включенными в состав вычислительной системы комплекса блоком приведения информации, блоком синтеза параметров движения и состояния, блоком расчета параметров движений и деформаций, соединенных между собой и с блоком формирования параметров состояния, с блоком комплексной обработки информации, с блоком ввода-вывода и управления информационным обменом вычислительной системы по магистрали вычислительного информационного обмена, которые обеспечивают определение взаимно-относительных движений и деформаций подвижного объекта.
Однако данный информационно-управляющий комплекс не может быть применён для автономного управления движением подвижных объектов, в связи с тем, что в нём отсутствует микроконтроллерный блок управления исполнительными механизмами, и отсутствует блок расчёта траектории движения в вычислительной системе комплекса.
Наиболее близким по технической сущности и достигаемому результату к предполагаемой полезной модели является навигационная система управления автономным надводным мини-кораблём «Нептун» (“Инженерный вестник Дона”, 2013, №4, ссылка: http://ivdon.ru/magazine/archive/n4y2013/1920).
Данная система управления автономным надводным мини-кораблём «Нептун» содержит бортовой вычислитель (навигационный компьютер), блок управления исполнительными механизмами (МКБУ ИМ), блок определения координат цели и регистрирующие устройства, содержащие бесплатформенную инерциальную навигационную систему (БИНС), спутниковую систему навигации (GPS/ГЛОНАСС), доплеровский лаг.
Автопилот формирует управляющие воздействия на основе координат точки позиционирования или траектории движения. Блок оценивания осуществляет оценивание внешних не измеряемых сил и моментов. Блок обработки навигационных данных комплексирует навигационные данные от БИНС, спутниковой навигационной системы и доплеровского лага. Микроконтроллерный блок управления исполнительными механизмами (МКБУ ИМ) преобразует управляющие воздействия автопилота в сигналы управления исполнительными механизмами. Исполнительные механизмы представляют собой два привода гребных винтов и сервопривод управления рулем поворота.
Недостатками данной системы являются отсутствие сканирования и анализа окружающего пространства на наличие препятствий на траектории движения и отсутствие сведений о состоянии погодных условий в районе предполагаемого плавания, что влияет на погрешность получаемых навигационных параметров, тем самым, снижает безопасность движения объекта, находящегося в навигационных условиях.
Технический результат – создание автономного навигационного комплекса управления подвижным объектом, обеспечивающего повышение безопасности движения объекта в сложных навигационных условиях.
Технический результат достигается тем, что автономный комплекс управления подвижным объектом, преимущественно в сложных навигационных условиях, содержащий навигационный компьютер, блок регистрирующих устройств, микроконтроллерный блок управления исполнительными механизмами, снабжен компьютером системы технического зрения, а блок регистрирующих устройств дополнительно содержит лидар, радиолокационную станцию, телекамеры в количестве восьми штук, гиростабилизированную оптико-электронную систему, автоматизированную идентификационную систему, инклинометры и метеостанцию, причём, микроконтроллерный блок управления исполнительными механизмами содержит микроконтроллер управления двигателем внутреннего сгорания, соединённый с датчиком частоты вращения вала, датчиком температуры охлаждающей жидкости, датчиком уровня масла двигателя, датчиком уровня топлива, а так же содержит, микроконтроллер управления реверс-редуктором, соединённый с датчиком положения реверс-редуктора, микроконтроллер управления зажиганием и микроконтроллер управления исполнительным механизмом связанный с датчиками исполнительного механизма.
На фиг. 1 представлена блок-схема автономного комплекса управления подвижным объектом, преимущественно в сложных навигационных условиях, в частности амфибийным транспортным средством способным перемещаться по суше, воде и сложно проходимым поверхностям таким как рыхлый снег, лёд, болото и др.
Данная блок-схема состоит из Навигационного компьютера 1, компьютера системы технического зрения 2, микроконтроллерного блока управления исполнительными механизмами 3, блока регистрирующих устройств 4.
Компьютер системы технического зрения 2 обеспечивает автоматический анализ поступающих телевизионных сигналов с целью выполнения следующих задач:
- формирование панорамных кадров;
- обнаружение целей и ориентиров, в том числе препятствий;
- определение координат окружающих объектов и самого подвижного объекта;
- распознавание и сопровождение окружающих объектов;
Навигационный компьютер 1 обрабатывает информацию синхронно с ходом процесса в реальном масштабе времени, что требуется при управлении движущимися объектами.
Навигационный компьютер 1 состоит из следующих блоков:
блок расчёта траектории 5;
блок навигации 6;
блок формирования карты 7;
блок управления движением 8.
Блок регистрирующих устройств 4 состоит из следующих устройств:
лидар 9 – прибор, который представляет собой активный дальномер оптического диапазона, формирующий двумерную или трёхмерную картину окружающего пространства;
радиолокационная станция 10 – система для обнаружения воздушных, морских и наземных объектов, а также для определения их дальности, скорости и геометрических параметров;
бесплатформенная инерциальная навигационная система (БИНС) 11 – датчик инерциальной навигации, служит для определения местоположения (координат) этого объекта, его курса, скорости, пройденного пути;
система спутниковой связи (GPS) 12 – предназначена для определения текущих географических координат, скоростей и направления движения (курса);
телекамеры 13 – используются для круглосуточной видеосъёмки окружающего пространства и формирования панорамного изображения;
гиростабилизированная оптико-электронная система (ГОЭС) 14 – позволяет обнаруживать объекты, создающие тепловой контраст (люди, транспортные средства, льдины различного размера и др.), не только в дневных условиях, но также ночью и в условиях недостаточной видимости, дополнительно обеспечивает стабилизацию выдаваемых телевизионных изображений по дифференту и рысканию посредством интегрированной системы гиростабилизации;
автоматическая идентификационная система (АИС) 15 – предназначена для повышения уровня безопасности мореплавания, эффективности судовождения и эксплуатации центра управления движением судов;
лаг 16 – прибор, предназначенный для измерения скорости подвижного объекта и пройденного им расстояния;
инклинометры 17 – используются для измерения угла наклона подвижного объекта относительно линии горизонта;
метеостанция 18 – дают информацию о фактическом состоянии погоды и обеспечивают ее прогнозирование.
Микроконтроллерный блок управления исполнительными механизмами 3 состоит из:
микроконтроллера управления 19;
датчика частоты вращения вала 20;
датчика температуры охлаждающей жидкости 21;
датчика уровня масла 22;
датчика уровня топлива 23;
датчика положения реверс-редуктора 24;
датчиков работы исполнительных механизмов 25 – движителей амфибийного транспортного средства, в частности, датчики вращения роторно-винтовых движителей.
Представленная блок-схема работает следующим образом.
Компьютер системы технического зрения 2 собирает видеоинформацию со всех телекамер 13 и гиростабилизированной оптико-электронной системы (ГОЭС) 14. Полученная видеоинформация объединяется в единую панораму и отправляется в навигационный компьютер 1 в блок формирования карты 7.
Блок навигации 6 собирает информацию о местонахождении и положении в пространстве подвижного объекта с бесплатформенной инерциальной навигационной системы (БИНС) 11, системы спутниковой связи (GPS) 12, лага 16, инклинометров 17, и после её обработки блок навигации 6 выдаёт эту информацию на блок расчёта траектории 5.
Блок формирования карты 7 собирает информацию об окружающем пространстве с лидара 9, радиолокационной станции 10, автоматической идентификационной системы (АИС) 15, метеостанции 18 и компьютера системы технического зрения 2, и формирует карту окружающего пространства вокруг подвижного объекта с нанесённой на ней информацией о препятствиях и погодных условиях. Затем эта информация поступает в блок расчёта траектории 5.
Блок расчёта траектории 5, получив информацию от блока навигации 6 и блока формировании карты 7, формирует траекторию движения подвижного объекта на некоторое время вперёд, избегая пересечения с препятствиями. Затем эта траектория пересылается в блок управления движением 8.
Блок управления движением 8 получает данные из блока расчёта траектории 5 и микроконтроллерного блока управления исполнительными механизмами 3 и формирует управляющие воздействия для соблюдения траектории движения. Управляющие воздействия пересылаются в микроконтроллерный блок управления исполнительными механизмами 3.
Для выполнения управляющих воздействий микроконтроллер управления 19 формирует регулирующие воздействия на исполнительные механизмы в соответствии с заданными параметрами управляющих воздействий. Помимо этого, микроконтроллер управления 19 анализирует информацию с датчика частоты вращения вала 20, датчика температуры охлаждающей жидкости 21, датчика уровня масла 22, датчика уровня топлива 23, датчика положения реверс-редуктора 24, датчиков работы исполнительных механизмов 25 и при отклонении заданных параметров микроконтроллер управления 19 формирует сигнал о возможных неполадках механизмов подвижного объекта и отправляет его в блок управления движением 8 навигационного компьютера.
Компьютер системы технического зрения, введённый в автономную систему управления подвижным объектом, соединённый с 8 телекамерами и гиростабилизированной оптико-электронной системой позволяет определять препятствия на маршруте движения подвижного объекта в видимом диапазоне в дневное и ночное время суток.
Блок регистрирующих устройств, дополнительно содержащий лидар, радиолокационную станцию, позволяет определять препятствия на маршруте движения подвижного объекта в лазерном и радио диапазоне на больших расстояниях.
Блок регистрирующих устройств, дополнительно содержащий автоматизированную идентификационную систему, позволяет заранее определить местонахождение в окружающем пространстве других плавсредств и их маршрут движения.
Блок регистрирующих устройств, дополнительно содержащий инклинометры, повышают точность определения положения в пространстве подвижного объекта.
Блок регистрирующих устройств, дополнительно содержащий метеостанцию, позволяет заранее узнать состояние погодных условий на маршруте движения подвижного объекта.
Микроконтроллерный блок управления исполнительными механизмами содержащий микроконтроллер управления двигателем внутреннего сгорания, соединённый с датчиком частоты вращения вала, датчиком температуры охлаждающей жидкости, датчиком уровня масла двигателя, датчиком уровня топлива, а так же содержащий, микроконтроллер управления реверс-редуктором, соединённый с датчиком положения реверс-редуктора, микроконтроллер управления зажиганием, микроконтроллер управления исполнительным механизмом связанный с датчиками исполнительного механизма, обеспечивает наблюдение за состоянием исполнительных механизмов, в частности, роторно-винтовых движителей и управление ими для движения по заданному маршруту движения.
Применение блок-схемы предлагаемого комплекса позволяет отследить местонахождение подвижного объекта, сформировать карту окружающего пространства, построить траекторию движения подвижного объекта, исключающую столкновение с препятствиями и попадание в плохие метеорологические условия движения и обеспечить безопасное перемещение в особо сложных навигационных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БУКСИРА ПОРТОВОГО ФЛОТА В РЕЖИМЕ ДИСТАНЦИОННОГО ПИЛОТИРОВАНИЯ | 2022 |
|
RU2794384C1 |
| ПОДВИЖНЫЙ МОРСКОЙ АППАРАТ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2011 |
|
RU2478059C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2014 |
|
RU2574938C2 |
| СИСТЕМА БЕЗОПАСНОСТИ, НАВИГАЦИИ И МОНИТОРИНГА | 1998 |
|
RU2122239C1 |
| Аппаратный комплекс телеметрии с высокой степенью автономности для сбора и передачи потоковых и телеметрических данных посредством самоорганизующихся беспроводных сетей, включающих спутниковый сегмент | 2022 |
|
RU2788302C1 |
| СПОСОБ НАВИГАЦИИ В ПОМЕЩЕНИИ И РАДИОНАВИГАЦИОННЫЙ ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2838877C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| ОПЫТОВЫЙ МОРСКОЙ МОДУЛЬНЫЙ КОМПЛЕКС | 2021 |
|
RU2760823C1 |

Изобретение относится к области информационных технологий, а именно к автономным системам управления подвижных объектов (наземных подвижных объектов, судов и т.п.), находящихся в особо сложных навигационных условиях движения. Автономный комплекс управления подвижным объектом, преимущественно в сложных навигационных условиях, содержит навигационный компьютер, блок регистрирующих устройств, микроконтроллерный блок управления с исполнительными механизмами. При этом комплекс снабжен компьютером системы технического зрения, а блок регистрирующих устройств дополнительно содержит лидар, радиолокационную станцию, телекамеры в количестве восьми штук, гиростабилизированную оптико-электронную систему, автоматизированную идентификационную систему, инклинометры и метеостанцию. Микроконтроллерный блок управления исполнительными механизмами содержит микроконтроллер управления двигателем внутреннего сгорания, соединённый с датчиком частоты вращения вала, датчиком температуры охлаждающей жидкости, датчиком уровня масла двигателя, датчиком уровня топлива, кроме того микроконтроллер управления реверс-редуктором, соединённый с датчиком положения реверс-редуктора, микроконтроллер управления зажиганием, микроконтроллер управления исполнительным механизмом связанный с датчиками исполнительного механизма. Технической результат – создание автономного навигационного комплекса управления подвижным объектом, обеспечивающего повышение безопасности движения объекта в сложных навигационных условиях. 1 ил.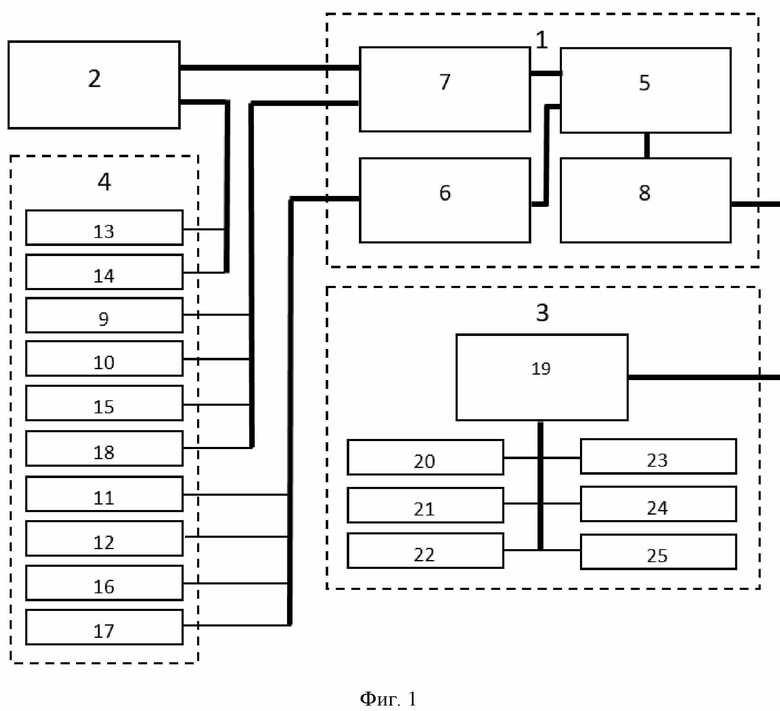
Автономный комплекс управления подвижным объектом, преимущественно в сложных навигационных условиях, содержащий навигационный компьютер, блок регистрирующих устройств, микроконтроллерный блок управления с исполнительными механизмами, отличающийся тем, что он снабжен компьютером системы технического зрения, а блок регистрирующих устройств дополнительно содержит лидар, радиолокационную станцию, телекамеры в количестве восьми штук, гиростабилизированную оптико-электронную систему, автоматизированную идентификационную систему, инклинометры и метеостанцию, причём, микроконтроллерный блок управления исполнительными механизмами содержит микроконтроллер управления двигателем внутреннего сгорания, соединённый с датчиком частоты вращения вала, датчиком температуры охлаждающей жидкости, датчиком уровня масла двигателя, датчиком уровня топлива, а так же содержит, микроконтроллер управления реверс-редуктором, соединённый с датчиком положения реверс-редуктора, микроконтроллер управления зажиганием, микроконтроллер управления исполнительным механизмом связанный с датчиками исполнительного механизма.
| РАСПРЕДЕЛЕННЫЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2232377C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2014 |
|
RU2578709C1 |
| 0 |
|
SU155170A1 | |
| US 9493235 B2, 15.11.2016. | |||

