Изобретение относится к навигационным комплексным системам, которые используются на судах портового флота в том числе на буксирах, предназначенных для дистанционного управления ими с берега с возможностью автоматического движения при прохождении в узкостях, расхождении с другими судами и швартовке к причалу.
Из области техники известно изобретение РФ №2478187 от 16.06.2011 г. «Судовой навигационный комплекс», который содержит спутниковую навигационную систему и инерциальную навигационную систему, подключенные к системе передачи данных, вычислитель навигационных параметров (фильтр Калмана), пульт управления, взаимосвязанный с блоком автоматического определителя достоверности спутниковой навигационной информации, коммутатор, два умножителя, сумматор и инвертор.
Известно изобретение РФ №2706434 от 23.12.2016 г. «Автономный комплекс управления подвижным объектом, преимущественно в сложных навигационных условиях», которое содержит навигационный компьютер, блок регистрирующих устройств, микроконтроллерный блок управления с исполнительными механизмами, компьютер системы технического зрения, блок регистрирующих устройств, дополнительно содержащий лидар, радиолокационную станцию, телекамеры, гиростабилизированную оптико-электронную систему, автоматизированную идентификационную систему, инклинометры и метеостанцию, причём, микроконтроллерный блок управления исполнительными механизмами содержит микроконтроллер управления двигателем внутреннего сгорания, соединённый с датчиком частоты вращения вала, датчиком температуры охлаждающей жидкости, датчиком уровня масла двигателя, датчиком уровня топлива, а так же содержит микроконтроллер управления реверс-редуктором, соединённый с датчиком положения реверс-редуктора, микроконтроллер управления зажиганием, микроконтроллер управления исполнительным механизмом, связанный с датчиками исполнительного механизма.
Изобретение направлено на обеспечение повышения безопасности движения объекта в сложных навигационных условиях.
Изобретение позволяет отследить местонахождение подвижного объекта, сформировать карту окружающего пространства, построить траекторию движения подвижного объекта, исключающую столкновение с препятствиями и попадание в плохие метеорологические условия движения, и обеспечить безопасное перемещение в особо сложных навигационных условиях. Вместе с тем, данное изобретение не имеет дополнительных источников информации об актуальной обстановке в акватории порта, дополнительных источников данных, которые позволили ли бы корректировать измерения параметров движения и факторов влияния, проводимых непосредственно на судне.
Технической проблемой, на решение которой направлена разработка заявляемой системы управления движением буксира портового флота в режиме дистанционного пилотирования, является обеспечение безопасности проводки крупнотоннажных судов в стесненных акваториях порта при дистанционном управлении буксира.
Технический результат заключается в обеспечении высокоточного позиционирования буксира в акватории порта, определения элементов его движения и положения относительно буксируемого судна и причала за счет наличия систем сбора данных, которые обобщаются и проходят обработку в соответствующих серверах и вычислительных блоках, вырабатывающие готовые решения для передачи на пункт управления удаленного капитана буксира.
Система управления движением буксира портового флота в режиме дистанционного пилотирования характеризуется наличием обзорно-поисковой системой буксира (ОПС), подсистемой внутрисудового наблюдения буксира (ПВН), системой высокоточной проводки и швартовки буксира (СВПШ), гидроакустической системой позиционирования буксира (ГСП), автономной навигационной системы (АНС) буксира, системой координированного управления движением буксира (СКУ), судовой интегрированной системой управления (ИСУ) технических средств (ТС) буксира, которые связаны с сетевым маршрутизатором буксира. СКУ связана с преобразователем сигналов судовых исполнительных устройств буксира, который в свою очередь связан с судовой ИСУ ТС буксира. Сетевой маршрутизатор буксира передает полученные данные от вышеупомянутых блоков через криптошлюз буксира по основному и/или резервному каналам обмена данными с постом дистанционного управления (ДУ) через береговой криптошлюз в береговой сетевой маршрутизатор. Береговой сетевой маршрутизатор связан с сервером оптической системы анализа окружающей среды и состояния судна (ОСА) комплексного рабочего места (КРМ) удаленного капитана буксира, сервером автономной навигационной системы (АНС) КРМ удаленного капитана буксира, сервером системы детальной регистрации данных и подсистемы самодиагностики (СДРПС), системы мониторинга доступности и контроля (СМК), системы контроля и управления доступом (СКУД), вычислителем СКУ, информационным сервером а-Навигации, картографическим сервером а-Навигации, гидрометеорологическим сервером а-навигации. КРМ удаленного капитана буксира, который обеспечивает дистанционное управление буксиром, связан с береговым сетевым маршрутизатором, который перенаправляет ему все необходимые данные. Криптошлюз внешних источников информации (ВИИ), который связан с береговым сетевым маршрутизатор, получает дополнительные данные по линии передачи данных от портовой системы управления движением судов (СУДС) и линии передачи данных глобальной сети INTERNET.
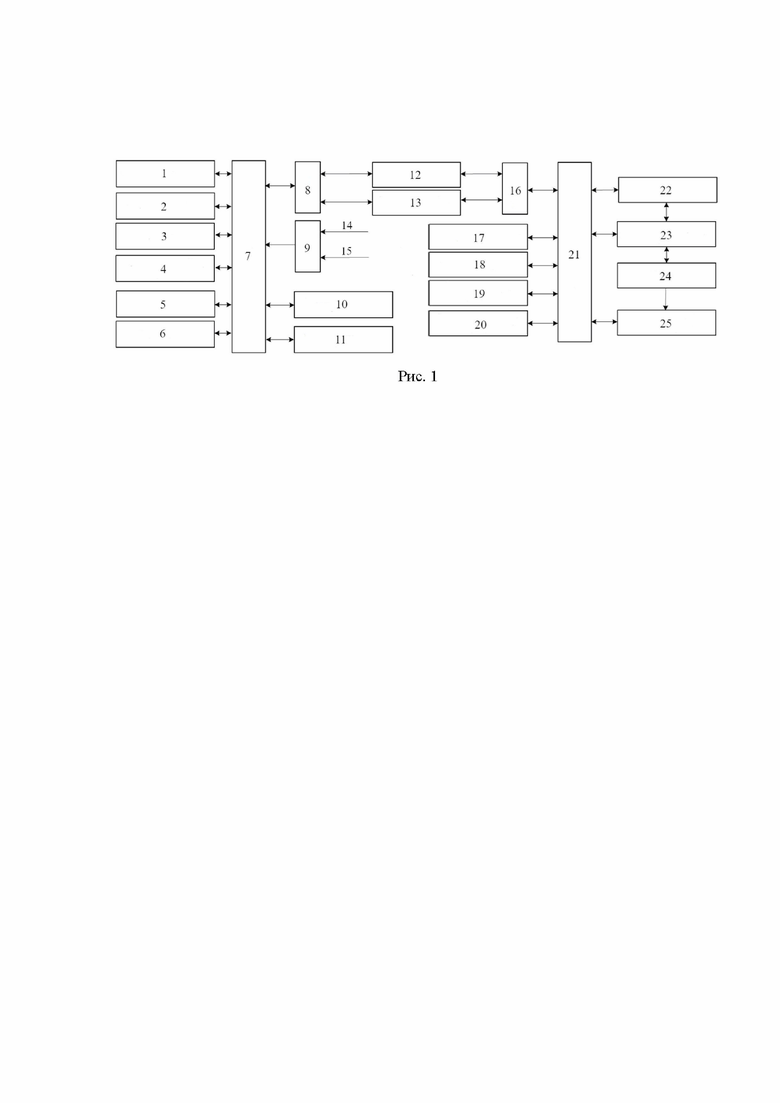
Изобретение поясняется при помощи рисунка 1, на котором изображена схема системы управления движением буксира портового флота в режиме дистанционного пилотирования, где:
1 сервер оптической системы анализа окружающей среды и состояния судна (ОСА) комплексного рабочего места (КРМ) удаленного капитана буксира;
2 сервер автономной навигационной системы (АНС) КРМ удаленного капитана буксира;
3 сервер системы детальной регистрации данных и подсистемы самодиагностики (СДРПС), системы мониторинга доступности и контроля (СМК), системы управления движением судов (СКУД);
4 вычислитель системы координированного управления движением буксира (СКУ);
5 информационный сервер а-Навигации;
6 картографический сервер а-Навигации;
7 береговой сетевой маршрутизатор;
8 береговой криптошлюз;
9 криптошлюз внешних источников информации (ВИИ);
10 гидрометеорологический сервер а-навигации;
11 комплексное рабочее место (КРМ) удаленного капитана буксира;
12 основной канал обмена данными с постом дистанционного управления (ДУ);
13 резервный канал обмена данными с постом дистанционного управления (ДУ);
14 линия передачи данных от портовой системы управления движением судов (СУДС);
15 линия передачи данных глобальной сети INTERNET;
16 криптошлюз буксира;
17 обзорно-поисковая система буксира (ОПС);
18 подсистема внутрисудового наблюдения буксира (ПВН);
19 система высокоточной проводки и швартовки буксира (СВПШ);
20 гидроакустическая система позиционирования буксира (ГСП);
21 сетевой маршрутизатор буксира;
22 автономная навигационная система (АНС) буксира;
23 система координированного управления движением буксира (СКУ);
24 преобразователь сигналов судовых исполнительных устройств буксира;
25 судовая интегрированная система управления (ИСУ) технических средств (ТС) буксира.
Система управления движением буксира портового флота в режиме дистанционного пилотирования содержит береговой сетевой маршрутизатор 7 и сетевой маршрутизатор буксира 21, между ними происходит обмен данными через береговой криптошлюз 8 и криптошлюз буксира 16 через основной канал обмена данными с постом ДУ 12, который состоит из приемо-передающей аппаратуры, и через резервный канал обмена данными с постом ДУ 13, так же состоящий из приемо-передающей аппаратуры.
Береговой сетевой маршрутизатор 7 обеспечивает обмен информацией сервера ОСА КРМ удаленного капитана буксира 1, сервера АНС КРМ удаленного капитана буксира 2, сервера СДРПС, СМК, СКУД 3, вычислителя СКУ 4, информационного сервера а-Навигации 5, картографического сервера а-Навигации 6, гидрометеорологического сервера а-Навигации 10, КРМ удаленного капитана буксира 11. Через криптошлюз ВИИ 9 береговой сетевой маршрутизатор 7 получает данные от портовой СУДС по линии передачи данных 14 и из глобальной сети INTERNET по линии передачи данных 15. Сервер ОСА КРМ удаленного капитана буксира 1, сервер АНС КРМ удаленного капитана буксира 2, сервер СДРПС, СМК, СКУД 3, вычислитель СКУ 4, информационный сервер а-Навигации 5, картографический сервер а-Навигации 6, береговой сетевой маршрутизатор 7, береговой криптошлюз 8 и криптошлюз ВИИ 9, гидрометеорологический сервер а-Навигации 10, КРМ удаленного капитана буксира 11, часть приемо-передающей аппаратуры основного канала обмена данными с постом ДУ 12 и часть приемо-передающей аппаратуры резервного канала обмена данными с постом ДУ 13 являются частью системы управления движением буксира на береговой стороне.
Сетевой маршрутизатор буксира 21 обеспечивает обмен информацией АНС буксира 22, СКУ 23, судовой ИСУ ТС буксира 25, ОПС 17, ПВН 18, СВПШ 19 и ГСП 20. Преобразователь сигналов судовых исполнительных устройств буксира 24 передают данные судовой ИСУ ТС буксира 25 и обменивается с СКУ 23. Часть приемо-передающей аппаратуры основного канала обмена данными с постом ДУ 12, часть приемо-передающей аппаратуры резервного канала обмена данными с постом ДУ 13, криптошлюз буксира 16, ОПС 17, ПВН 18, СВПШ 19, ГСП 20, сетевой маршрутизатор буксира 21, АНС буксира 22, СКУ 23, преобразователь сигналов судовых исполнительных устройств буксира 24, судовая ИСУ ТС буксира 25 являются частью системы управления движением буксира на стороне буксира.
Система используется следующим образом. Удаленный капитан осуществляет управление буксиром благодаря взаимодействию разнородных систем через распределение информации с помощью берегового сетевого маршрутизатора 7 и сетевого маршрутизатора буксира 21, которые связаны между собой основным каналом связи 12 и резервным каналом связи 13. В зависимости от нагрузки данные распределяются по основному 12 и резервному 13 каналам связи, передаваемые данные защищены береговым криптошлюзом 8 и криптошлюзом буксира 16.
КРМ удаленного капитана буксира 11 передает управляющие команды через береговой сетевой маршрутизатор 7, береговой криптошлюз 8, по каналам связи 12 и 13, через криптошлюз буксира 16, сетевой маршрутизатор буксира 21 на АНС буксира 22, которая в свою очередь направляет их на СКУ 23 и далее на преобразователь сигналов судовых исполнительных устройств буксира 24. Для формирования управляющих команд капитана на КРМ удаленного капитана буксира 11 приходят результаты вычислений навигационных задач, которые осуществляет вычислитель СКУ КРМ удаленного капитана буксира 4. Вычислитель СКУ КРМ удаленного капитана буксира 4 для своих вычислений использует данные, собранные на сервере ОСА КРМ удаленного капитана буксира 1 и на сервере АНС КРМ удаленного капитана буксира 2, данные поступают на него через береговой сетевой маршрутизатор 7.
Сервер ОСА КРМ удаленного капитана буксира 1 и на сервер АНС КРМ удаленного капитана буксира 2 собирают данные следующим образом.
От ОПС 17, осуществляющую круглосуточное наблюдение, обнаружение и идентификацию навигационных опасностей, других судов и навигационных знаков, и от ПВН 18, осуществляющую круглосуточное наблюдение за критически важными помещениями на буксире и стрелочными приборами, дистанционное управление которыми невозможно, информация через сетевой маршрутизатор буксира 21, криптошлюз буксира 16, каналы связи 12 и 13, береговой криптошлюз 8, береговой сетевой маршрутизатор 7 поступает на сервер ОСА КРМ удаленного капитана буксира 1. Одновременно с этим данные от ОПС 17, ПВН 18, СВПШ 19, обеспечивающей высокоточное позиционирование буксира в акватории порта, определение элементов его движения и положение относительно буксируемого судна и причала, ГСП 20, обеспечивающей дополнительную информацию для позиционирования буксира в акватории порта, судовой ИСУ ТС буксира 25, обеспечивающей автоматический сбор данных о судовых механизмах и системах, поступают через сетевой маршрутизатор буксира 21 в АНС буксира 22. В свою очередь в АНС буксира 22 анализируются все поступающие данные от вышеперечисленных систем, исключаются недостоверные и ошибочные, вырабатываются усреднённые координаты и элементы движения буксира (курс, скорость), учитывается инерция буксира. От АНС буксира 22 данные поступают в СКУ 23, анализирующую управляющие команды, которые передаются в преобразователь сигналов судовых исполнительных механизмов 24. Судовая ИСУ ТС буксира 25 получает от преобразователя сигналов судовых исполнительных устройств буксира 24 данные о состояниях судовых механизмов и систем, в автоматическом режиме осуществляет их сбор и хранение. Затем данные о работе судовых механизмов, об исполнении управляющих команд передаются от судовой ИСУ ТС буксира 25 через сетевой маршрутизатор буксира 21 и СКУ 23 в АНС буксира 22. Параллельно с этим все команды, сформированные в АНС буксира 22 передаются через сетевой маршрутизатор буксира 21, криптошлюз буксира 16 по каналам связи 12 и 13, береговой криптошлюз 8, береговой сетевой маршрутизатор 7 на сервер АНС КРМ удаленного капитана буксира 2. Дополнительно по линии передачи данных 14 от внешней системы портовой СУДС и линии передачи данных глобальной сети INTERNET 15, через криптошлюз ВИИ 9, береговой сетевой маршрутизатор 7, береговой криптошлюз 8, по каналам связи 12 и 13, через криптошлюз буксира 16, сетевой маршрутизатор буксира 21 в АНС буксира 22 поступают данные об актуальной обстановке в акватории порта, местонахождении самого буксира и актуальное состояние метеоусловий в акватории порта.
Данные, собранные на сервере ОСА КРМ удаленного капитана буксира 1 и на сервере АНС КРМ удаленного капитана буксира 2, через береговой сетевой маршрутизатор 7 поступают на сервер СДРПС, СМК, СКУД 3, осуществляющий регистрацию данных состояния всей системы, сбор, хранение, обработку и контроль данных о доступности сети для обеспечения защиты всей системы.
Данные о судах, входящих и выходящих из порта, и их характеристиках, по линии передачи данных 14 от внешней системы портовой СУДС через криптошлюз ВИИ 9, береговой сетевой маршрутизатор 7 поступают на информационный сервер а-Навигации 5, который осуществляет их сбор, анализ и обобщение, затем эти данные через береговой сетевой маршрутизатор 7 поступают на КРМ удаленного капитана буксира 11. На картографический сервер а-Навигации 6, осуществляющий сбор, анализ и обобщение информации о навигационной обстановке в акватории порта, поступают данные от сервера АНС КРМ удаленного капитана буксира 2 через береговой сетевой маршрутизатор 7 и дополнительно данные приходят по линии передачи данных 14 от внешней системы портовой СУДС через криптошлюз ВИИ 9 и береговой сетевой маршрутизатор 7. Затем эти данные от картографического сервера а-Навигации 6 через береговой сетевой маршрутизатор 7 поступают на КРМ удаленного капитана буксира 11. Данные о гидрометеорологической обстановке в акватории порта по линии передачи данных глобальной сети INTERNET 15 через криптошлюз ВИИ 9, береговой сетевой маршрутизатор 7 поступает на гидрометеорологический сервер а-Навигации 10, который осуществляет их сбор, анализ и обобщение, затем эти данные через береговой сетевой маршрутизатор 7 поступают на КРМ удаленного капитана буксира 11. Параллельно с этим КРМ удаленного капитана буксира 11 через береговой сетевой маршрутизатор 7 предоставляет серверу СДРПС, СМК, СКУД 3 данные о контроле доступа.
Система дополнительно может обеспечивать полноценную работу и движение буксира в автоматическом режиме, при этом КРМ удаленного капитана буксира 11 осуществляет непрерывный контроль за исполнением управляющих команд преобразователем сигналов судовых исполнительных устройств буксира 24 и сбор всех данных. СКУ 23 в этом случае осуществляет формирование управляющих команд на основе информации, полученной от АНС буксира 22.
Разработанная система управления движением буксира портового флота в режиме дистанционного пилотирования обеспечивает точность позиционирования по дальности не хуже 1 м, по пеленгу не хуже 0,15°.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления координированной групповой деятельностью буксиров-автоматов | 2023 |
|
RU2823051C1 |
| СПОСОБ ПРОВОДКИ, ШВАРТОВКИ И ОТШВАРТОВКИ МОРСКОГО ГРУЗОВОГО СУДНА В АВТОНОМНОМ РЕЖИМЕ И СПОСОБ РАБОТЫ ЦИФРОВОЙ ИНСТРУМЕНТАЛЬНОЙ ПЛАТФОРМЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ АВТОНОМНЫХ СУДОВ-БУКСИРОВ В ПОРТОВОЙ АКВАТОРИИ | 2023 |
|
RU2809129C1 |
| НАВИГАЦИОННЫЙ ТРЕНАЖЁР | 2023 |
|
RU2838905C2 |
| КОМПЛЕКС ОПТИЧЕСКОГО ВИДЕОНАБЛЮДЕНИЯ, ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ ОБЪЕКТОВ НА ОСНОВЕ МАШИННОГО ЗРЕНИЯ ДЛЯ МОРСКИХ И РЕЧНЫХ СУДОВ | 2023 |
|
RU2816392C1 |
| Система управления техническими средствами и движением МАНС | 2023 |
|
RU2825914C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| БОРТОВОЙ АВТОМАТИЗИРОВАННЫЙ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ОПЕРАТИВНОГО СБОРА И ОБРАБОТКИ ЛОКАЛЬНОЙ ИНФОРМАЦИИ ОБ ОБСТАНОВКЕ В РАЙОНЕ МЕСТОНАХОЖДЕНИЯ СУДНА (БИК ЛО) | 2024 |
|
RU2825859C1 |
| ОПТОЭЛЕКТРОННАЯ СИСТЕМА АНАЛИЗА ВНЕШНЕЙ ОБСТАНОВКИ НА ОСНОВЕ МАШИННОГО ЗРЕНИЯ | 2019 |
|
RU2735559C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
Изобретение относится к навигационным комплексным системам, которые используются на судах портового флота, в том числе на буксирах, предназначенных для дистанционного управления ими с берега. Система управления движением буксира содержит обзорно-поисковую систему, подсистему внутрисудового наблюдения, систему высокоточной проводки и швартовки, гидроакустическую систему позиционирования, автономную навигационную систему, систему координированного управления движением (СКУ), судовую интегрированную систему управления (ИСУ) технических средств (ТС), которые связаны с сетевым маршрутизатором буксира. СКУ связана с преобразователем сигналов судовых исполнительных устройств буксира, который в свою очередь связан с судовой ИСУ ТС. Сетевой маршрутизатор буксира передает полученные данные через криптошлюз по каналам обмена данными с постом дистанционного управления через береговой криптошлюз в береговой сетевой маршрутизатор, который связан с серверами, вычислителем, информационным, картографическим и гидрометеорологическим серверами а-Навигации. Обеспечивается высокоточное позиционирование буксира. 1 ил.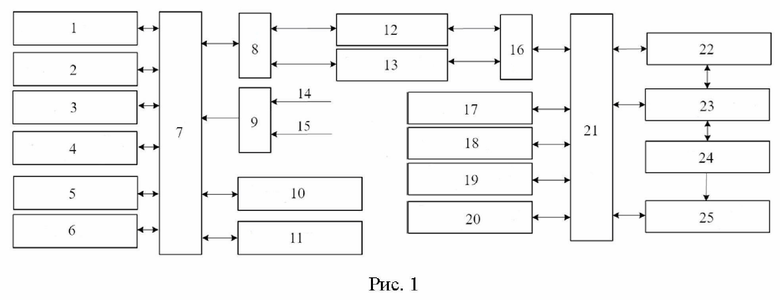
Система управления движением буксира портового флота в режиме дистанционного пилотирования, характеризующаяся наличием обзорно-поисковой системы буксира ОПС, подсистемы внутрисудового наблюдения буксира ПВН, системы высокоточной проводки и швартовки буксира СВПШ, гидроакустической системы позиционирования буксира ГСП, автономной навигационной системы АНС буксира, системы координированного управления движением буксира СКУ, судовой интегрированной системы управления ИСУ технических средств ТС буксира, которые связаны с сетевым маршрутизатором буксира,
система координированного управления движением буксира СКУ связана с преобразователем сигналов судовых исполнительных устройств буксира, который в свою очередь связан с судовой ИСУ ТС буксира,
сетевой маршрутизатор буксира передает полученные данные от вышеупомянутых систем через криптошлюз буксира по основному и/или резервному каналам обмена данными с постом дистанционного управления ДУ через береговой криптошлюз в береговой сетевой маршрутизатор, который связан с сервером оптической системы анализа окружающей среды и состояния судна ОСА комплексного рабочего места КРМ удаленного капитана буксира, сервером автономной навигационной системы АНС КРМ удаленного капитана буксира, сервером системы детальной регистрации данных и подсистемы самодиагностики СДРПС, системы мониторинга доступности и контроля СМК, системы контроля и управления доступом СКУД, вычислителем СКУ, информационным сервером а-Навигации, картографическим сервером а-Навигации, гидрометеорологическим сервером а-Навигации КРМ удаленного капитана буксира, обеспечивающего дистанционное управление буксиром, связано с береговым сетевым маршрутизатором, который перенаправляет упомянутому КРМ все необходимые данные,
при этом криптошлюз внешних источников информации ВИИ, связанный с береговым сетевым маршрутизатором, получает дополнительные данные по линии передачи данных от портовой системы управления движением судов СУДС и линии передачи данных глобальной сети INTERNET.
| Патрон многократного действия для развальцовки труб | 1966 |
|
SU202050A1 |
| СИСТЕМА КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА В РЕЖИМАХ АВТОМАТИЧЕСКОГО И ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2020 |
|
RU2741669C1 |
| СИСТЕМА ПРОГНОЗИРОВАНИЯ БЕЗОПАСНОГО РАСХОЖДЕНИЯ СУДОВ | 2020 |
|
RU2752725C1 |
| 0 |
|
SU165915A1 | |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ НАКАТКИ ЗУБЧАТЫХ ПРОФИЛЕЙ | 0 |
|
SU181032A1 |
| СИСТЕМА МОНИТОРИНГА ТЕХНИЧЕСКОГО СОСТОЯНИЯ СРЕДСТВ СВЯЗИ И НАВИГАЦИОННОГО ОБОРУДОВАНИЯ | 2021 |
|
RU2774400C1 |
| Дубовицкий В | |||
| А., Окороков Н | |||
| С | |||
| Концепция интеллектуальной навигационной сети для применения в системах автономного судовождения | |||
| Международный научный журнал | |||

