ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству локализации транспортного средства.
2. Раскрытие предшествующего уровня техники
[0002] Японская патентная заявка № 2015-194397 (JP 2015-194397 A) известна как технический документ, относящийся к устройству локализации транспортного средства. Вышеупомянутый технический документ раскрывает устройство определения положения транспортного средства, обнаруживающее спрогнозированное положение транспортного средства в текущий момент времени на основании картографических данных и захваченными изображениями местности вокруг транспортного средства. Это устройство определения местоположения транспортного средства получает набор соответствий между сегментом линии на карте и захваченным сегментом линии, руководствуясь информацией о местоположении нескольких сегментов линии на карте (дорожная разметка и т.п.), включенной в картографические данные, и положением нескольких сегментов линии, получаемым путем обнаружения сегментов линии на захваченных изображениях местности около транспортного средства, снятых камерой на транспортном средстве и преобразованных в изображение сверху в общем виде для обнаружения сегментов линии. После этого устройство определения местоположения транспортного средства обновляет спрогнозированное положение транспортного средства таким образом, чтобы информация о местоположении сегмента линии и положение соответствующего сегмента линии, полученного из захваченного изображения, совпадали.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Цель, используемая в качестве ссылки на положение на карте при локализации транспортного средства, не ограничивается сегментом линии, в частности, линией разметки; можно использовать различные цели, например, обозначение пешеходного перехода, столб, ограждение и т. п. на дорожной поверхности. Одинаковая обработка, выполняемая для таких различных целей, может привести к ошибочному распознаванию цели или снижению точности распознавания положения цели. В этом случае возникает проблема, заключающаяся в снижении точности локализации транспортного средства вследствие ошибочного распознавания цели или снижения точности распознавания положения цели.
[0004] Настоящим изобретением предложено устройство локализации транспортного средства, способное предотвратить снижение точности определения положения транспортного средства.
[0005] Первый аспект изобретения относится к устройству локализации транспортного средства. Устройство локализации транспортного средства содержит базу данных целей, в которой хранится информация о местоположении первой цели на карте и информация о местоположении второй цели на карте; блок распознавания цели, выполненный с возможностью распознавания положения первой цели относительно транспортного средства и положения второй цели относительно транспортного средства на основании результатов распознавания встроенным датчиком транспортного средства; блок оценки поперечного положения, выполненный с возможностью анализа поперечного положения транспортного средства и направления транспортного средства на основании положения первой цели относительно транспортного средства и информации о местоположении первой цели на карте, причем под поперечным положением транспортного средства понимают положение транспортного средства на карте в направлении ширины полосы, по которой движется транспортное средство; и блок оценки продольного положения, выполненный с возможностью анализа продольного положения транспортного средства на основании положения второй цели относительно транспортного средства и информации о местоположении второй цели на карте, причем положение второй цели относительно транспортного средства отражает поперечное положение транспортного средства и направление транспортного средства, причем под продольным положением транспортного средства понимают положение транспортного средства на карте в направлении продолжения полосы движения.
[0006] Устройство локализации транспортного средства в описанном выше варианте осуществления различает первую цель, используемую для анализа поперечного положения, и вторую цель, используемую для анализа продольного положения, в целях оценки поперечного и продольного положения транспортного средства, соответственно. Таким образом, оценка поперечного и продольного положения транспортного средства позволяет предотвратить влияние результата распознавания цели, не подходящего для анализа поперечного положения (неправильное распознавание или распознавание с низкой точностью положения), на оценку поперечного положения транспортного средства, и влияние результата распознавания цели, не подходящего для анализа продольного положения, на оценку продольного положения транспортного средства, предотвращая тем самым снижение точности определения положения транспортного средства. Кроме того, в описанном выше варианте осуществления устройство локализации транспортного средства оценивает продольное положение транспортного средства на основании положения второй цели относительно транспортного средства, отражающего расчетное поперечное положение транспортного средства и расчетное направление транспортного средства, и на основании информации о местоположении второй цели на карте, хранящейся в базе данных целей. Поэтому устройство локализации транспортного средства предотвращает снижение точности оценки продольного положения транспортного средства, обусловленное влиянием отклонения поперечного положения и направления транспортного средства, с большей эффективностью в том случае, когда продольное положение транспортного средства оценивается устройством локализации транспортного средства в вышеописанном варианте осуществления, в отличие от случая, когда положение транспортного средства (поперечное и продольное) оценивается единовременно, без различения первой и второй цели.
[0007] Согласно аспекту изобретения, в базе данных целей первая цель может содержать прямую линию разметки, соответствующую прямому участку дороги, а вторая цель может содержать, по меньшей мере, одну изогнутую линию разметки, соответствующую криволинейному участку дороги, блок распознавания цели может быть выполнен с возможностью распознавания положения прямой линии разметки относительно транспортного средства и положения, по меньшей мере, одной изогнутой линии разметки относительно транспортного средства на основании результатов распознавания встроенным датчиком транспортного средства, блок оценки поперечного положения может быть выполнен с возможностью анализа поперечного положения и направления транспортного средства на основании положения прямой линии разметки относительно транспортного средства и информации о местоположении прямой линии разметки на карте, а блок оценки продольного положения может быть выполнен с возможностью анализа продольного положения транспортного средства на основании положения, по меньшей мере, одной изогнутой линии разметки относительно транспортного средства и информации о местоположении, по меньшей мере, одной изогнутой линии разметки на карте, причем относительное положение, по меньшей мере, одной изогнутой линии разметки относительно транспортного средства отражает поперечное положение и направление транспортного средства.
[0008] В описанном выше варианте осуществления изобретения устройство локализации транспортного средства оценивает продольное положение и направление транспортного средства по прямой линии разметки, пригодной для оценки поперечного положения, и дополнительно оценивает продольное положение транспортного средства на основании положения изогнутой линии разметки относительно транспортного средства, отражающего расчетное поперечное положение транспортного средства и расчетное направление транспортного средства, и на основании информации о местоположении изогнутой линии разметки на карте. Поэтому устройство локализации транспортного средства предотвращает снижение точности оценки продольного положения транспортного средства, обусловленное влиянием отклонения поперечного положения и направления транспортного средства, с большей эффективностью в том случае, когда продольное положение транспортного средства оценивается устройством локализации транспортного средства в вышеописанном варианте осуществления, в отличие от случая, когда положение транспортного средства (поперечное и продольное ) оценивается единовременно, без различения прямой и изогнутой линии разметки.
[0009] Согласно аспекту изобретения, устройство локализации транспортного средства может дополнительно содержать блок вычисления коэффициента увеличения, выполненный с возможностью вычисления коэффициента увеличения ширины поворота, когда блок распознавания цели обнаруживает (i) относительное положение левой изогнутой линии разметки, соответствующей криволинейному участку полосы движения, и (ii) относительное положение правой изогнутой линии разметки, соответствующей криволинейному участку полосы движения, причем левая изогнутая линия разметки входит, по меньшей мере, в одну изогнутую линию разметки, правая изогнутая линия разметки входит, по меньшей мере, в одну изогнутую линию разметки, причем блок оценки продольного положения может быть настроен таким образом, чтобы он не сравнивал относительное положение части, входящей в состав левой или правой изогнутой линии разметки, причем коэффициент увеличения этой части равен или превышает заданный предельный коэффициент увеличения, с информацией о положении, по меньшей мере, одной изогнутой линии разметки на карте.
[0010] При наличии ответвления от криволинейного участка полосы, по которой движется транспортное средство, разметка ответвления, соответствующая траектории ответвления, иногда ошибочно распознается как изогнутая линия разметки криволинейного участка полосы. Устройство локализации транспортного средства в описанном выше варианте осуществления может предотвратить снижение точности оценки продольного положения транспортного средства, вызванное ошибкой различения линии разметки ответвления и изогнутой линии разметки.
[0011] Согласно аспекту изобретения, блок вычисления коэффициента увеличения может быть выполнен с возможностью вычисления коэффициента увеличения расстояния между левой изогнутой линией разметки и правой изогнутой линией разметки относительно ширины прямого участка дороги в качестве коэффициента увеличения ширины поворота.
[0012] Согласно аспекту изобретения, в базе данных целей вторая цель может содержать линию разметки ответвления, соответствующую траектории ответвления, а блок оценки продольного положения может быть выполнен с возможностью оценки продольного положения транспортного средства на основании положения линии разметки ответвления относительно транспортного средства и информации о местоположении линии разметки ответвления на карте, причем положение линии разметки ответвления относительно транспортного средства отражает поперечное положение и направление транспортного средства.
[0013] Устройство локализации транспортного средства в описанном выше варианте осуществления изобретения позволяет оценивать продольное положение транспортного средства с использованием линии разметки ответвления, соответствующей траектории ответвления. Это позволяет устройству локализации транспортного средства оценивать продольное положение транспортного средства с использованием линии разметки ответвления, даже если изогнутая линия разметки не может быть распознана надлежащим образом.
[0014] Как было описано выше, устройство локализации транспортного средства в одном из вариантов осуществления настоящего изобретения способно препятствовать снижению точности локализации транспортного средства.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0015] Отличительные признаки, преимущества, техническая и промышленная значимость примерных вариантов осуществления настоящего изобретения раскрыты ниже со ссылкой на сопроводительные чертежи, в которых одинаковые обозначения относятся к одинаковым элементам:
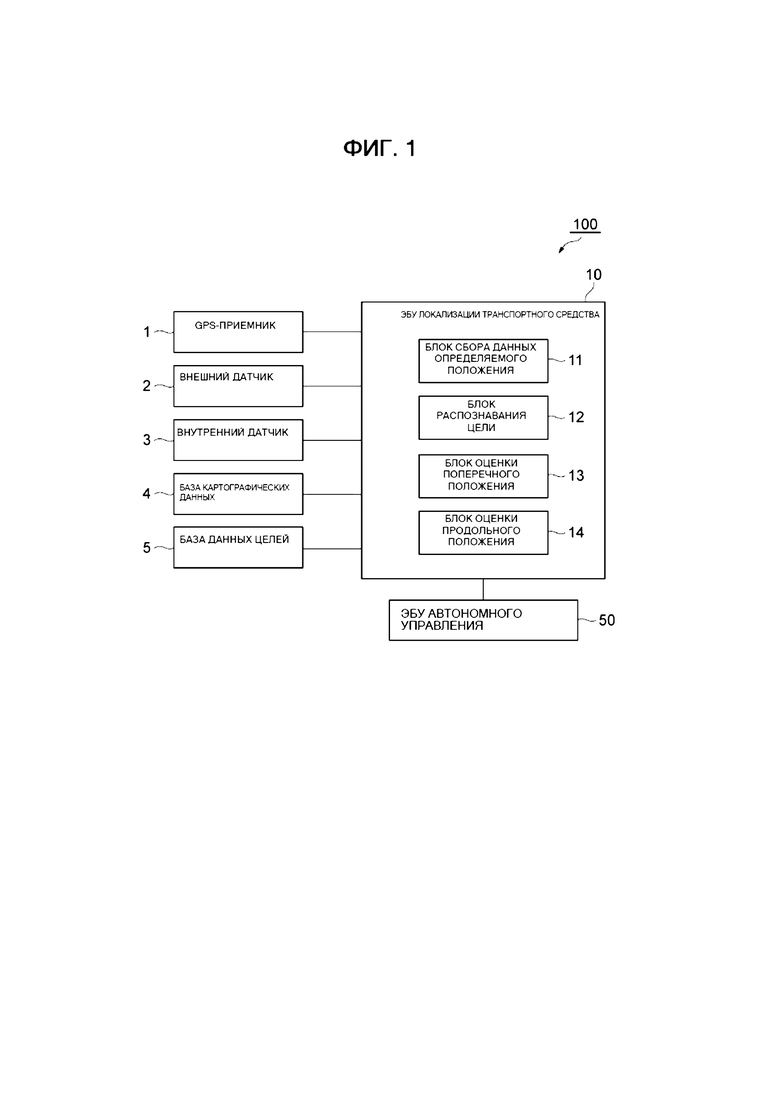
На фиг. 1 изображена блок-схема, иллюстрирующая устройство локализации транспортного средства в первом варианте осуществления;
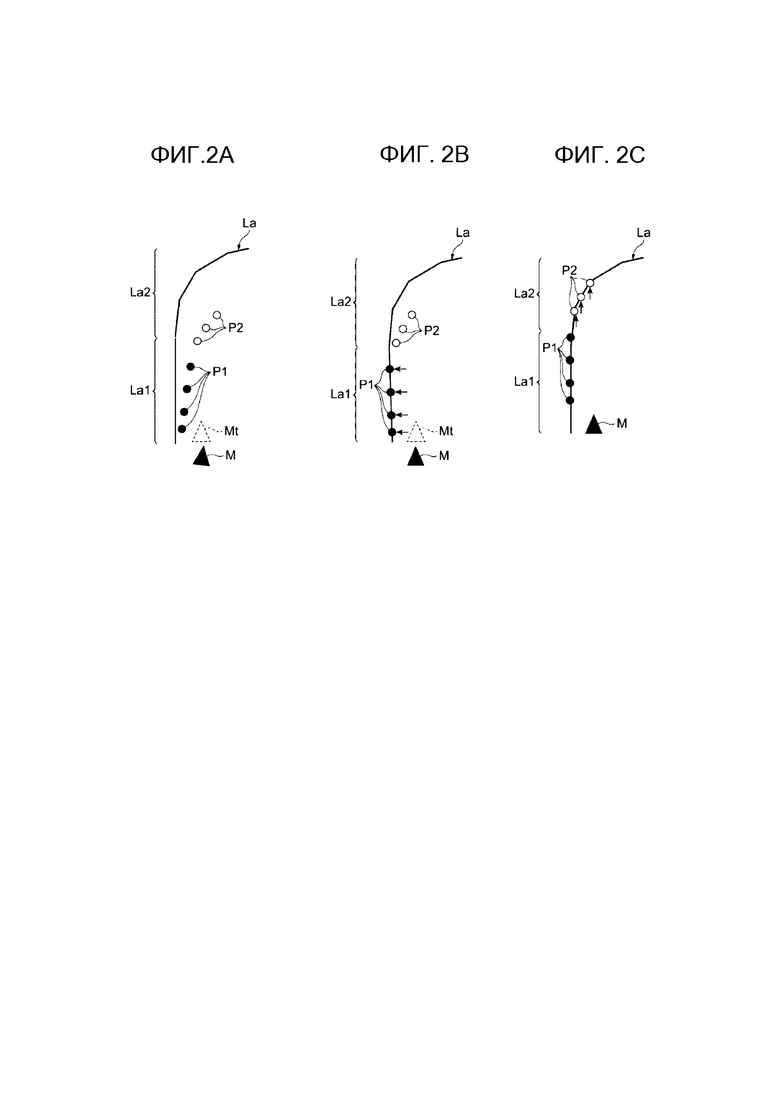
На фиг. 2A изображена диаграмма, иллюстрирующая ситуацию до оценки поперечного положения транспортного средства, входящего в поворот;
На фиг. 2B изображена диаграмма, иллюстрирующая оценку поперечного положения и направления транспортного средства;
На фиг. 2C изображена диаграмма, иллюстрирующая оценку продольного положения транспортного средства;
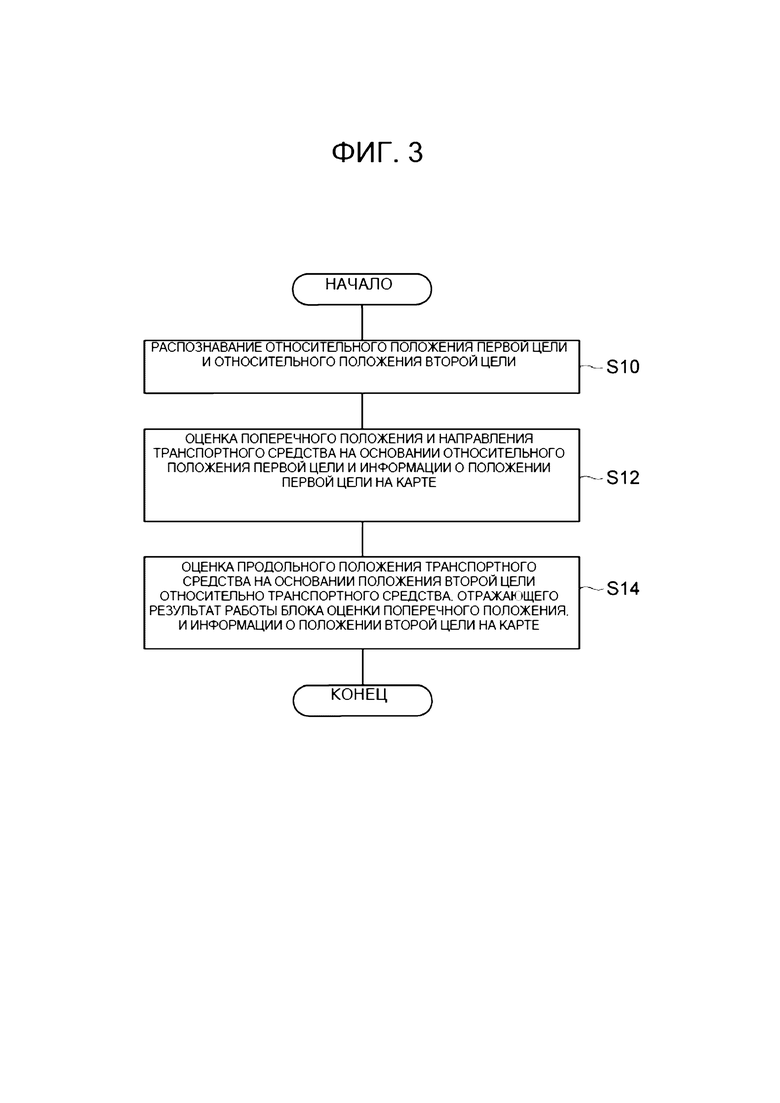
На фиг. 3 изображена блок-схема примера осуществления локализации транспортного средства;
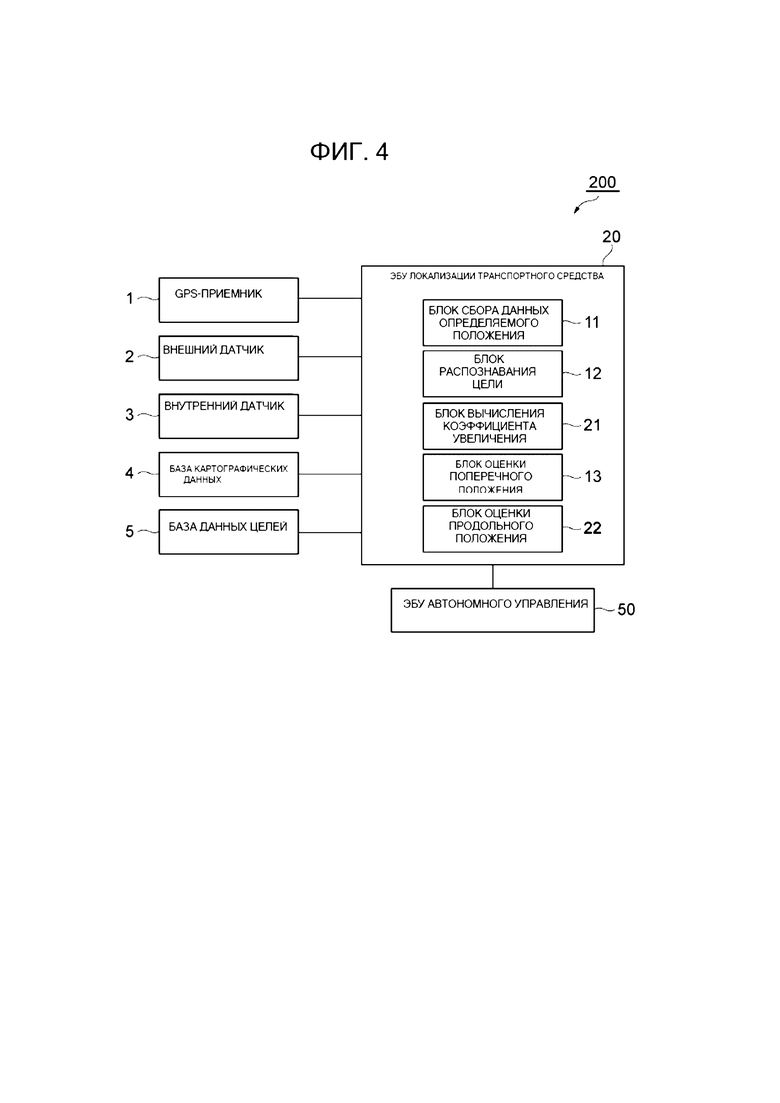
На фиг. 4 изображена блок-схема, иллюстрирующая устройство локализации транспортного средства во втором варианте осуществления;
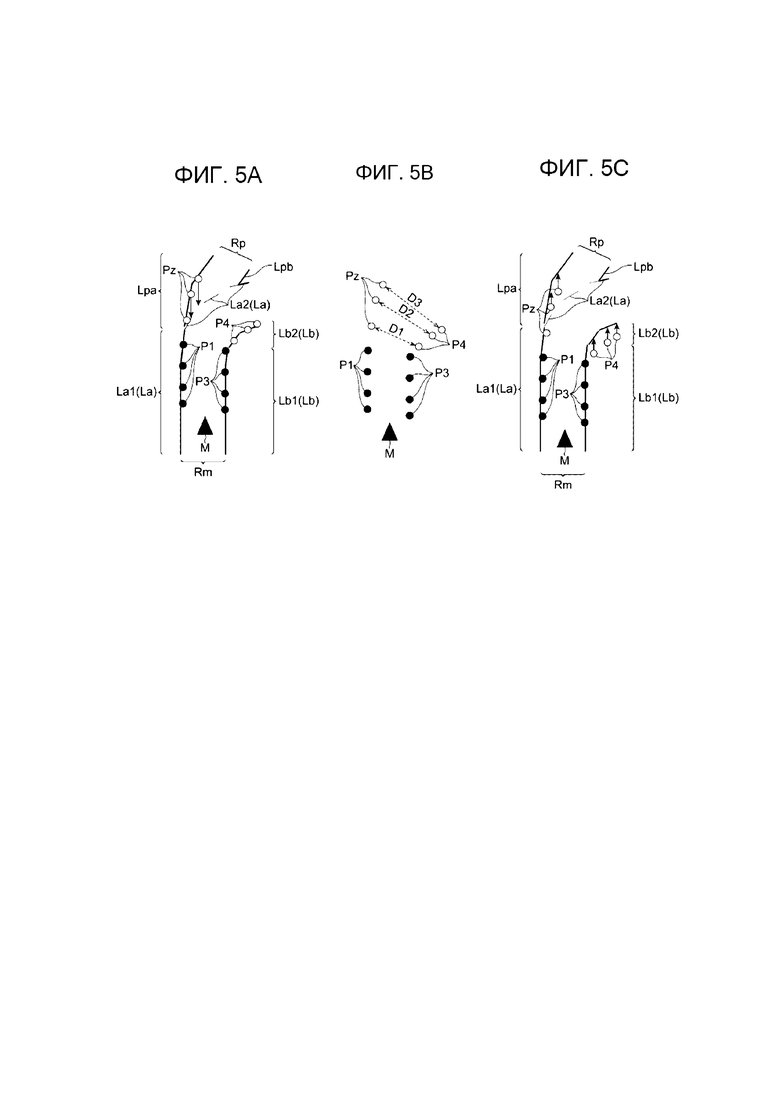
На фиг. 5A изображена диаграмма, иллюстрирующая случай, в котором линия разметки ответвления ошибочно распознается как изогнутая линия разметки;
На фиг. 5B изображена диаграмма, иллюстрирующая коэффициент увеличения ширины поворота;
На фиг. 5C изображена диаграмма, иллюстрирующая оценку продольного положения транспортного средства с использованием линии разметки ответвления; и
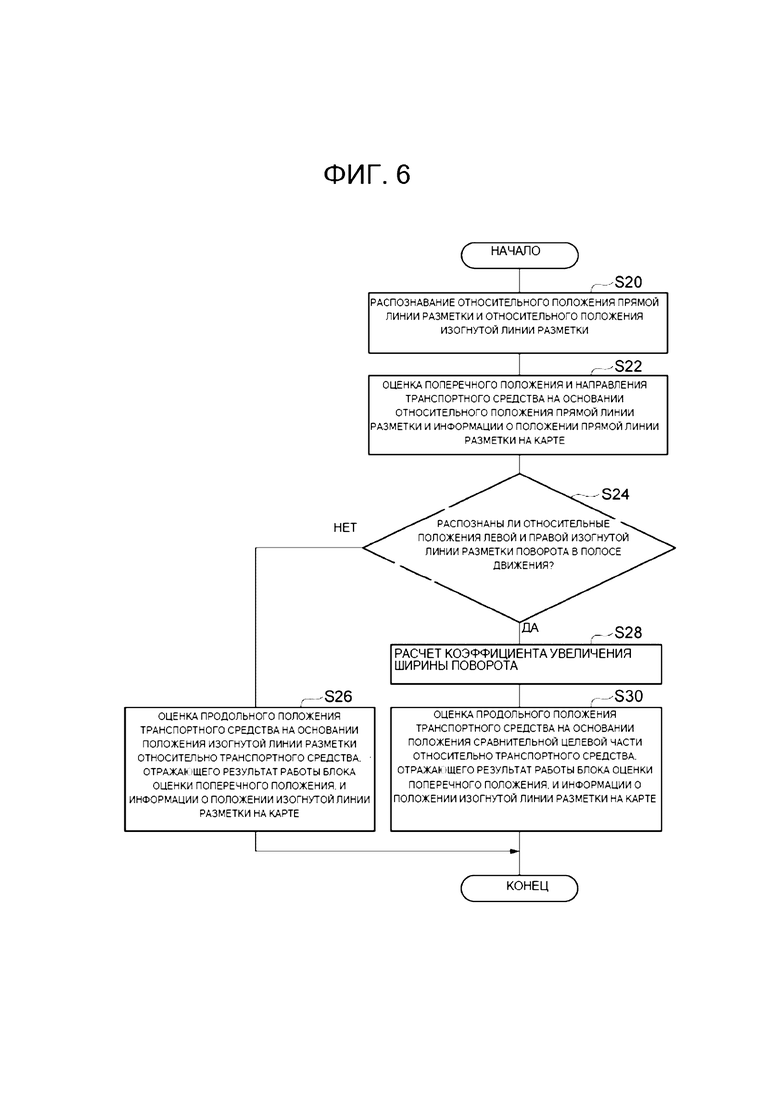
На фиг. 6 изображена блок-схема примера осуществления локализации транспортного средства согласно второму варианту осуществления.
ПОДРОБНОЕ РАСКРЫТИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0016] Варианты осуществления настоящего изобретения будут раскрыты далее со ссылкой на чертежи.
[0017] [Первый вариант осуществления изобретения]
На фиг. 1 изображена блок-схема, иллюстрирующая устройство локализации транспортного средства в первом варианте осуществления изобретения. Устройство 100 локализации транспортного средства, изображенное на фиг. 1, представляет собой устройство для оценки положения транспортного средства, под которым понимают положение транспортного средства, в частности, легкового автомобиля, на карте. Устройство 100 локализации транспортного средства оценивает поперечное положение транспортного средства, под которым понимают положение на карте в направлении ширины полосы дороги, по которой движется транспортное средство, и продольное положение транспортного средства, под которым понимают положение на карте в направлении продолжения полосы дороги, в качестве положения транспортного средства.
[0018] <Конфигурация устройства локализации транспортного средства в первом варианте осуществления изобретения >
Как показано на фиг. 1, устройство 100 локализации транспортного средства содержит электронный блок управления (ЭБУ) 10, предназначенный для управления системой в целом. ЭБУ 10 локализации транспортного средства представляет собой электронный блок управления, содержащий центральный процессор (ЦП), постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ) и цепочку связи контроллерной сети (шины CAN). В ЭБУ 10 локализации транспортного средства программа, хранящаяся в ПЗУ, загружается в ОЗУ, причем программа, загруженная в ОЗУ, выполняется ЦП в целях реализации различных функций. ЭБУ 10 локализации транспортного средства может содержать несколько электронных блоков.
[0019] ЭБУ 10 локализации транспортного средства соединен с GPS-приемником 1, внешним датчиком 2 (встроенным датчиком), внутренним датчиком 3, базой 4 картографических данных, базой 5 данных целей и ЭБУ 50 автономного управления.
[0020] GPS-приемник 1 представляет собой измерительный блок, который определяет положение транспортного средства на карте (например, широту и долготу транспортного средства), на основании сигналов от трех и более спутников GPS. GPS-приемник 1 передает результаты измерения местоположения транспортного средства в ЭБУ 10 локализации транспортного средства.
[0021] Внешний датчик 2 представляет собой устройство распознавания (встроенный датчик), установленное на транспортном средстве и предназначенное для распознавания ситуации около транспортного средства. Внешний датчик 2 содержит, по меньшей мере, одну видеокамеру и один радарный датчик.
[0022] Под видеокамерой понимают устройство регистрации ситуации вокруг транспортного средства. Камера установлена на внутренней стороне лобового стекла транспортного средства. Камера передает захваченную информацию о ситуации вокруг транспортного средства в ЭБУ 10 локализации транспортного средства. Камера может представлять собой монокулярную или стереокамеру. Стереокамера содержит два блока захвата изображения, расположенные таким образом, чтобы можно было воспроизвести рассогласование между правым и левым глазом. Информация, захваченная стереокамерой, также содержит информацию в направлении глубины. Камера может быть рассчитана на захват участка сбоку от транспортного средства.
[0023] Под радарным датчиком понимают устройство обнаружения, обнаруживающее объект в зоне около транспортного средства с использованием радиоволн (например, миллиметровых волн) или света. Радарный датчик представляет собой, например, миллиметровый радар или лазерный локатор (LIDAR – Light Detection And Ranging, лазерная система обнаружения и измерения дальности). Радарный датчик посылает радиоволны или свет в среду около транспортного средства и обнаруживает объект, получая радиоволны или свет, отраженный объектом. Радарный датчик передает информацию об обнаруженном объекте в ЭБУ 10 локализации транспортного средства. Радарный датчик может содержать несколько датчиков, включая миллиметровый радар и лазерный локатор. Радарный датчик может быть рассчитан на обнаружение объекта сбоку от транспортного средства.
[0024] Внутренний датчик 3 представляет собой устройство обнаружения, распознающее состояние транспортного средства при движении. Внутренний датчик 3 содержит датчик скорости транспортного средства, датчик ускорения и датчик скорости отклонения от курса. Под датчиком скорости транспортного средства понимают устройство обнаружения, определяющее скорость транспортного средства. Примером датчика скорости транспортного средства служит датчик частоты вращения колеса, установленный на колесах транспортного средства или приводном валу, вращающемся синхронно с колесами, и предназначенный для определения частоты вращения колес. Датчик скорости транспортного средства передает полученную информацию о скорости транспортного средства (информацию о частоте вращения колеса) в ЭБУ 10 локализации транспортного средства.
[0025] Под датчиком ускорения понимают устройство обнаружения, определяющее ускорение транспортного средства. Например, датчик ускорения содержит датчик продольного ускорения, определяющий ускорение в продольном направлении транспортного средства, и датчик поперечного ускорения, определяющий ускорение в поперечном направлении транспортного средства. Датчик ускорения передает результаты измерения ускорения в ЭБУ 10 локализации транспортного средства. Датчик скорости отклонения от курса представляет собой устройство обнаружения, определяющее скорость отклонения от курса (скорость углового поворачивания) вокруг вертикальной оси в центре тяжести транспортного средства. Например, в качестве датчика скорости отклонения от курса может использоваться гироскопический датчик. Датчик скорости отклонения от курса передает результаты измерения скорости отклонения от курса транспортного средства в ЭБУ 10 локализации транспортного средства.
[0026] Показания (информация о скорости транспортного средства, информация о скорости отклонения от курса и т. п.) внутреннего датчика 3 можно использовать для измерения положения транспортного средства на карте. В данном случае внутренний датчик 3 функционирует как измерительный блок, измеряющий положение транспортного средства на карте. Следует отметить, что ЭБУ 10 локализации транспортного средства не обязательно должен быть соединен с внутренним датчиком 3.
[0027] База 4 картографических данных представляет собой базу данных, в которой хранится картографическая информация. База 4 картографических данных сформирована, например, на жестком диске [HDD], установленном в транспортном средстве. В картографическую информацию входит информация о местоположении на дорогах (информация о местоположении на полосах движения), информация о формах дороги (например, изогнутая часть прямого участка дороги, извилина и т. п.) и информация о местоположении на перекрестках и в точках ответвления. База 4 картографических данных может быть сформирована на сервере, выполненном с возможностью взаимодействия с транспортным средством.
[0028] База данных 5 целей представляет собой базу данных, в которой хранится информация о целевых объектах. Цель, под которой понимают объект с известным положением на карте, используют в качестве опорного значения для локализации транспортного средства. В число целей входят линии разметки, в том числе, по меньшей мере, одна из: линия полосы движения, разделительная линия и центральная осевая линия.
[0029] В число целей входит первая цель для оценки поперечного положения и вторая цель для оценки продольного положения. В число первых целей для оценки поперечного положения входит прямая линия разметки, соответствующая прямому участку дороги. Прямая линия разметки, соответствующая прямому участку дороги, представляет собой линию разметки, кривизна которой меньше первого порогового значения кривой. Под первым пороговым значением кривой понимают пороговое значение, заданное для идентификации прямой линии разметки, пригодной для оценки поперечного положения. Первое пороговое значение кривой может быть постоянным значением или изменяться в зависимости от региона. Прямая линия разметки, подлежащая идентификации только в целях локализации транспортного средства, не обязательно должна полностью соответствовать линии разметки участка, хранящегося в картографической информации в виде прямого участка дороги.
[0030] Первая цель, предназначенная для оценки поперечного положения, может содержать структуры, расположенные вдоль дороги. К структурам, расположенным вдоль дороги, относится, по меньшей мере, стена, изгородь, вывеска, ограждение и тумба.
[0031] Первая цель, предназначенная для оценки поперечного положения, может содержать границу дороги. Под границей дороги понимают край дороги, служащий границей между дорогой и областью вне дороги в направлении ширины (направлении ширины дороги). Например, в границу дороги входит граница между асфальтированной дорогой и грунтом в направлении ширины асфальтированной дороги, находящаяся на грунте. Границу дороги, используемую в качестве первой цели для оценки поперечного положения, можно также использовать для определения полосы движения, по которой перемещается транспортное средство во время движения по многополосной дороге. Помимо вышесказанного, в качестве первой цели для оценки поперечного положения можно использовать известную цель, пригодную для оценки поперечного положения транспортного средства.
[0032] Вторая цель, предназначенная для оценки продольного положения, содержит, например, изогнутую линию разметки, соответствующую криволинейному участку. Изогнутая линия разметки, соответствующая криволинейному участку, представляет собой линию разметки, кривизна которой равна или превышает второе пороговое значение кривой. Второе пороговое значение кривой представляет собой пороговое значение, заданное для идентификации среди линий разметки изогнутой линии разметки, пригодной для оценки продольного положения.
[0033] Второе пороговое значение кривой может быть постоянным значением или изменяться в зависимости от региона. Под вторым пороговым значением кривой понимают пороговое значение, равное или превышающее первое пороговое значение кривой. То есть между прямой линией разметки и изогнутой линией разметки может находиться линия разметки, не используемая для оценки поперечного или продольного положения. Кроме того, изогнутая линия разметки, подлежащая идентификации только в целях локализации транспортного средства, не обязательно должна полностью соответствовать линии разметки участка, хранящегося в картографической информации в виде кривой. Вторая цель должна включать только изогнутую линию разметки, находящуюся на заданном расстоянии от прямой линии разметки в составе одной линии разметки.
[0034] Вторая цель, предназначенная для оценки продольного положения, может содержать дорожные знаки, в частности, знак запрета поворота, знак ограничения максимальной скорости, знак главной дороги, знак, требующий уступить дорогу, знак направления движения, знак пешеходного перехода, стоп-линию и т. п. К числу вторых целей может относиться, по меньшей мере, одна из следующих конструкций: столб, светоотражатели в повороте, светофор, люк, выход и вход в туннель, ворота ETC и т. п. Помимо вышесказанного, в качестве второй цели для оценки продольного положения можно использовать известную цель, пригодную для оценки продольного положения транспортного средства.
[0035] Первая цель и вторая цель могут представлять собой разные цели, не перекрывающие друг друга. В альтернативном варианте первая цель и вторая цель могут представлять собой одну и ту же цель. Если линия разметки, в состав которой входит прямая линия разметки, обозначена как пунктирная линия, вторая цель может содержать каждый из сегментов пунктирной линии. В данном случае для оценки продольного положения транспортного средства можно использовать относительные положения оконечностей (границ начального и завершающего участков) каждого сегмента пунктирной линии в направлении продолжения дороги.
[0036] В информацию о целях, хранящуюся в базе 5 данных целей, входит информация о положении цели на карте и информация о назначении цели. Информация о положении цели на карте содержит информацию о положении первой цели на карте и информацию о положении второй цели на карте. Под информацией о назначении цели понимают информацию для распознавания (идентификации) цели по результатам обнаружения внешним датчиком 2. Информация о назначении цели может содержать информацию о типе цели (информация о типе, указывающая, что цель является столбом, линией разметки и т. п.), форме цели и размере цели. Информация о назначении цели может храниться отдельно от информации о цели, хранящейся в базе 5 данных целей.
[0037] База 5 данных целей необязательно должна быть установлена на транспортном средстве; она может быть сформирована на сервере, выполненном с возможностью взаимодействия с транспортным средством. Кроме того, база 5 данных целей может быть выполнена в виде базы данных, интегрированной с базой 4 картографических данных. В этом случае информация о целях может быть интегрирована с картографической информацией, хранящейся в базе 4 картографических данных.
[0038] ЭБУ 50 автономного управления, установленный на транспортном средстве, представляет собой электронный блок управления, предназначенный для автономного управления транспортным средством. Под автономным управлением транспортным средством понимают управление транспортным средством без участия водителя. ЭБУ 50 автономного управления транспортным средством может содержать несколько электронных блоков. Часть функций ЭБУ 50 автономного управления может выполняться сервером, выполненным с возможностью установления связи с транспортным средством.
[0039] ЭБУ 50 автономного управления распознает среду вокруг транспортного средства (например, положение другого транспортного средства относительно данного транспортного средства) в зависимости от показаний внешнего датчика 2. ЭБУ 50 автономного управления распознает состояние транспортного средства, в частности, скорость транспортного средства и скорость отклонения от курса, на основании показаний внутреннего датчика 3. ЭБУ 50 автономного управления составляет план движения по заданному целевому маршруту в зависимости от положения транспортного средства, определенного устройством 100 локализации транспортного средства, картографической информации, хранящейся в базе 4 картографических данных, среды вокруг транспортного средства и состояния транспортного средства. Целевой маршрут может быть задан вручную пассажиром транспортного средства или автоматически известной навигационной системой или ЭБУ 50 автономного управления.
[0040] ЭБУ 50 автономного управления осуществляет автономное управление в соответствии с планом движения. ЭБУ 50 автономного управления осуществляет автономное управление, направляя управляющий сигнал на приводы (исполнительный механизм двигателя, исполнительный механизм рулевого управления, исполнительный механизм тормоза и т. п.) транспортного средства. ЭБУ 50 автономного управления может составлять план движения и осуществлять автономное управление известным способом. Следует отметить, что ЭБУ 10 локализации транспортного средства не обязательно должен быть соединен с ЭБУ 50 автономного управления.
[0041] Ниже будет рассмотрена функциональная конфигурация ЭБУ 10 локализации транспортного средства. ЭБУ 10 локализации транспортного средства содержит блок 11 сбора данных определяемого положения, блок 12 распознавания цели, блок 13 оценки поперечного положения и блок 14 оценки продольного положения.
[0042] Блок 11 сбора данных определяемого положения получает положение измерения, представляющее собой положение транспортного средства на карте, на основании информации о местоположении транспортного средства, полученной GPS-приемником 1. Блок 11 сбора данных определяемого положения может также получить информацию об определяемом положении транспортного средства из архива данных скорости транспортного средства (или архива данных частоты вращения колес) и архива данных скорости отклонения от курса транспортного средства на основании показаний внутреннего датчика 3. Иными словами, блок 11 сбора данных может получить информацию об определяемом положении транспортного средства посредством так называемой одометрии с использованием известного метода.
[0043] Блок 12 распознавания цели распознает положение первой цели относительно транспортного средства и положение второй цели относительно транспортного средства. Например, используя определяемое положение транспортного средства, найденное блоком 11 сбора данных определяемого положения, блок 12 распознавания цели выбирает кандидатов для первой цели и кандидатов для второй цели, под которыми понимают возможные цели, обнаруженные внешним датчиком 2 транспортного средства, среди информации о целях, хранящейся в базе 5 данных целей. После этого, основываясь на показаниях внешнего датчика 2 и информации о характеристиках выбранных возможных целей (например, типе, форме и размере цели), блок 12 распознавания цели распознает первую цель и вторую цель около транспортного средства. Блок 12 распознавания цели распознает относительное положение (положение относительно транспортного средства) распознанной первой цели и относительное положение распознанной второй цели относительно транспортного средства на основании показаний внешнего датчика 2.
[0044] Следует отметить, что блок 12 распознавания цели необязательно должен использовать определяемое положение транспортного средства. Если положение транспортного средства уже было определено ранее, то блок может использовать такое положение транспортного средства (например, определенное при обработке оценки, выполненной непосредственно перед этим). Относительное положение первой и второй цели можно определить на основании изображения, захваченного камерой внешнего датчика 2 и/или информации об объекте, полученной радарным датчиком внешнего датчика 2. Способ распознавания относительного положения первой и второй цели не ограничивается описанным выше способом; допускается использование различных способов.
[0045] Блок 12 распознавания цели распознает часть линии разметки, кривизна которой меньше первого порогового значения кривой, как прямую линию разметки (первая цель) и часть линии разметки, кривизна которой равна или превышает второе пороговое значение кривой, как изогнутую линию разметки (вторая цель). Известный способ может быть использован для распознавания кривизны линии разметки.
[0046] Блок 13 оценки поперечного положения оценивает поперечное положение и направление транспортного средства основываясь на относительном положении первой цели по отношению к транспортному средству, распознанного блоком 12 распознавания цели, и информации о положении первой цели на карте, хранящейся в базе 5 данных целей. Под поперечным положением транспортного средства понимают положение транспортного средства на карте в направлении ширины полосы, по которой движется транспортное средство. Под направлением транспортного средства понимают направление транспортного средства на карте (направление транспортного средства относительно полосы движения).
[0047] Блок 13 оценки поперечного положения оценивает поперечное положение и направление транспортного средства путем сравнения положения первой цели относительно транспортного средства с информацией о положении первой цели на карте. Сравнение выполняют, например, с использованием оценки методом наименьших квадратов. Способ оценки поперечного положения транспортного средства М и направления транспортного средства М, выполняемой путем сравнения относительного положения первой цели с информацией о положении первой цели на карте, не ограничивается определенным методом; допускается использование различных методов.
[0048] На фиг. 2A изображена диаграмма, иллюстрирующая ситуацию до оценки поперечного положения транспортного средства, входящего в поворот. На фиг. 2А изображено транспортное средство М до оценки его поперечного положения, линия La разметки, обозначающая внешний край полосы движения транспортного средства, прямая линия La1 разметки, входящая в состав линии La разметки и соответствующая прямому участку дороги, изогнутая линия La2 разметки, входящая в состав линии La разметки и соответствующая повороту, положения P1 прямой линии La1 разметки относительно транспортного средства M, распознанные блоком 12 распознавания цели, и положения P2 изогнутой линии La2 разметки относительно транспортного средства M, распознанные блоком 12 распознавания цели.
[0049] Транспортное средство M, изображенное на фиг. 2А, представляет собой транспортное средство до оценки поперечного положения и соответствует определяемому положению, которое блок 11 сбора данных определяемого положения получил по результатам работы GPS-приемника 1. С другой стороны, транспортное средство Mt, обозначенное пунктирной линией, иллюстрирует нахождение транспортного средства M в правильном положении на карте (положении, являющемся целью локализации транспортного средства). То есть на фиг. 2А измеренное положение транспортного средства М отличается от правильного положения на карте. Направление транспортного средства M также некорректно. На фиг. 2А показан случай, в котором блок 12 распознавания цели распознал положения Р1 прямой линии La1 разметки и положения Р2 изогнутой линии La2 разметки в виде ряда детектируемых точек, полученных радарным датчиком.
[0050] На фиг. 2В показана схема, иллюстрирующая оценку поперечного положения транспортного средства М и направления транспортного средства М. Следует отметить, что поперечное положение и направление транспортного средства, оцененные блоком 13 оценки поперечного положения, уже были отражены в поперечном положении транспортного средства М и направлении транспортного средства М на фиг. 2B.
[0051] Как показано на фиг. 2B, блок 13 оценки поперечного положения определяет поперечное положение и направление транспортного средства M путем сравнения относительных положений P1 прямой линии La1 разметки, распознанной блоком 12 распознавания цели, с информацией о положении прямой линии La1 разметки на карте, хранящейся в базе 5 данных целей.
[0052] Блок 14 оценки продольного положения оценивает продольное положение транспортного средства на основании положения второй цели относительно транспортного средства M, отражающего поперечное положение и направление транспортного средства M, полученные блоком 13 оценки поперечного положения, и на основании информации о положении второй цели на карте, хранящейся в базе 5 данных целей.
[0053] Под положением второй цели относительно транспортного средства М, отражающим поперечное положение транспортного средства М и направление транспортного средства М, найденные блоком 13 оценки поперечного положения, понимают относительное положение второй цели, связь которой с информацией о положении второй цели на карте исправлена путем корректировки поперечного положения транспортного средства М на карте и его направления, используемых в качестве опорных значений, в соответствии с результатом работы блока 13 оценки поперечного положения. Таким образом, как показано на фиг. 2A и фиг. 2В, соотношение положений Р2 изогнутой линии La2 разметки относительно транспортного средства М с информацией о положении изогнутой линии La2 разметки на карте исправлено путем корректировки поперечного положения транспортного средства М и направления транспортного средства M на карте в соответствии с результатом работы блока 13 оценки поперечного положения.
[0054] Блок 14 оценки продольного положения оценивает продольное положение транспортного средства, сравнивая положение второй цели относительно транспортного средства M, отражающее поперечное положение и направление транспортного средства M, полученные блоком 13 оценки поперечного положения (исправленное относительное положение второй цели) с информацией о положении второй цели на карте. Сравнение выполняют, например, с использованием оценки методом наименьших квадратов. Способ оценки продольного положения транспортного средства М не ограничивается конкретным способом; допускается использование различных способов при условии использования относительного положения откорректированной второй цели.
[0055] На фиг. 2C изображена диаграмма, иллюстрирующая оценку продольного положения транспортного средства. Как показано на фиг. 2С, блок 14 оценки продольного положения сравнивает положения P2 изогнутой линии La2 разметки относительно транспортного средства M, отражающие результат работы блока 13 оценки поперечного положения на фиг. 2В, с информацией о положении изогнутой линии La2 разметки на карте, хранящейся в базе 5 данных целей. Таким образом, блок 14 оценки продольного положения определяет продольное положение транспортного средства М с минимальным влиянием отклонения поперечного положения транспортного средства М и направления транспортного средства М.
[0056] <Процесс локализации транспортного средства согласно первому варианту осуществления>
Ниже будет рассмотрен процесс локализации транспортного средства, выполняемый устройством 100 локализации транспортного средства согласно первому варианту осуществления, со ссылкой на фиг. 3. На фиг. 3 изображена блок-схема примера осуществления локализации транспортного средства. Блок-схема, показанная на фиг. 3, отрабатывается, например, при движении транспортного средства M. Предполагается, что блок 11 сбора данных определяемого положения получает информацию об определяемом положении транспортного средства М по мере необходимости.
[0057] Как показано на фиг. 3, на этапе S10 ЭБУ 10 локализации транспортного средства устройства 100 локализации транспортного средства использует блок 12 распознавания цели для распознавания относительного положения первой цели и относительного положения второй цели. Блок 12 распознавания цели распознает относительное положение первой цели и относительное положение второй цели около транспортного средства М на основании показаний внешнего датчика 2, определяемое положение транспортного средства М, найденное блоком 11 сбора данных определяемого положения (или положение транспортного средства, оцененное непосредственно перед этим), и информацию о цели, хранящуюся в базе 5 данных целей.
[0058] На этапе S12 ЭБУ 10 локализации транспортного средства использует блок 13 оценки поперечного положения для определения поперечного положения транспортного средства М и направления транспортного средства М. Блок 13 оценки поперечного положения определяет поперечное положение и направление транспортного средства M в зависимости от положения первой цели относительно транспортного средства M, распознанного блоком 13 распознавания цели, и информации о положении первой цели на карте, хранящейся в базе 13 данных целей.
[0059] На этапе S14 ЭБУ 10 локализации транспортного средства использует блок 14 оценки продольного положения для определения продольного положения транспортного средства M. Блок 14 оценки продольного положения оценивает продольное положение транспортного средства путем сравнения положения второй цели относительно транспортного средства M, отражающего поперечное положение и направление транспортного средства M, полученные блоком 13 оценки поперечного положения, с информацией о положении второй цели на карте, хранящейся в базе 5 данных целей. После этого ЭБУ 10 локализации транспортного средства прекращает текущую обработку. ЭБУ 10 локализации транспортного средства повторяет обработку, начиная с этапа S10, по истечении заданного времени.
[0060] Следует отметить, что на этапе S10 относительное положение первой цели и относительное положение второй цели необязательно будут распознаваться одновременно. Если блок 12 распознавания цели распознал относительное положение второй цели, но не может одновременно распознать относительное положение первой цели, ЭБУ 10 локализации транспортного средства может перейти к выполнению этапа S12, используя относительное положение первой цели, найденное по результатам последней обработки. В альтернативном варианте ЭБУ 10 локализации транспортного средства может переходить к выполнению этапа S12 только в том случае, если блок 12 распознавания цели одновременно распознает относительное положение первой и второй цели.
[0061] <Результаты применения устройства локализации транспортного средства согласно первому варианту осуществления>
Устройство 100 локализации транспортного средства согласно первому варианту осуществления, описанному выше, оценивает поперечное положение транспортного средства М и продольное положение транспортного средства М по отдельности, путем различения первой цели для оценки поперечного положения и второй цели для оценки продольного положения. Таким образом, оценка поперечного и продольного положения транспортного средства M позволяет предотвратить влияние результата распознавания цели, не подходящего для анализа поперечного положения (неправильное распознавание или распознавание с низкой точностью положения), на оценку поперечного положения транспортного средства, и влияние результата распознавания цели, не подходящего для анализа продольного положения, на оценку продольного положения транспортного средства, предотвращая тем самым снижение точности определения продольного положения транспортного средства M.
[0062] Кроме того, устройство 100 локализации транспортного средства оценивает поперечное положение и направление транспортного средства M по первой цели, в качестве которой выступает прямая линия разметки, пригодная для оценки поперечного положения; кроме того, устройство 100 локализации транспортного средства оценивает продольное положение транспортного средства M на основании положения второй цели (изогнутой линии разметки и т. п.) относительно транспортного средства M, отражающего расчетное поперечное положение транспортного средства M и расчетное направление транспортного средства M, и на основании информации о положении второй цели на карте, хранящейся в базе данных целей. Поэтому устройство 100 локализации транспортного средства предотвращает снижение точности оценки продольного положения транспортного средства M, обусловленное влиянием отклонения поперечного положения и направления транспортного средства M, с большей эффективностью в том случае, когда продольное положение транспортного средства M оценивается согласно вышеописанному варианту осуществления, в отличие от случая, когда положение транспортного средства (поперечное и продольное) оценивается единовременно, без различения первой и второй цели.
[0063] [Второй вариант осуществления изобретения]
Ниже будет рассмотрено устройство локализации транспортного средства согласно второму варианту осуществления. На фиг. 4 изображена блок-схема, иллюстрирующая устройство локализации транспортного средства во втором варианте осуществления изобретения. В приведенном ниже описании компоненты, аналогичные упомянутым в первом варианте осуществления, имеют такие же ссылочные обозначения; повторное описание таких компонентов будет опущено.
[0064] Устройство 200 локализации транспортного средства, изображенное на фиг. 4, отличается от устройства 100 локализации транспортного средства согласно первому варианту осуществления изобретения тем, что устройство 200 локализации транспортного средства не оценивает продольное положение в ситуации, когда линия разметки ответвления, соответствующая траектории ответвления, ошибочно распознается в качестве изогнутой линии разметки. К ошибочно распознаваемым линиям разметки ответвлений относятся линии разметки ответвлений, которые уже были закрыты, но остались на дорожной поверхности (не удаленная линия разметки).
[0065] На фиг. 5A изображена диаграмма, иллюстрирующая случай, в котором линия разметки ответвления ошибочно распознается как изогнутая линия разметки. На фиг. 5A показана ситуация, в которой транспортное средство M входит в кривую. На фиг. 5А изображена полоса Rm движения транспортного средства М, левая линия La разметки полосы Rm, правая линия Lb разметки полосы Rm, траектория Rp ответвления, отходящего от полосы Rm, левая линия Lpa разметки траектории Rp ответвления, правая линия Lpb разметки траектории Rp ответвления и относительные положения Pz линии Lpa разметки ответвления, ошибочно распознанной блоком 12 распознавания цели в качестве изогнутой линии La2 разметки. Левая линия La разметки полосы Rm содержит прямую линию La1 разметки и изогнутую линию La2 разметки, а правая линия Lb разметки полосы Rm содержит прямую линию Lb1 разметки и изогнутую линию Lb2 разметки.
[0066] На фиг. 5А линия разметки части, входящей в изогнутую линию La2 разметки и соответствующая заезду на траекторию Rp ответвления (часть, обозначенная тонкой линией), стерлась вследствие движения транспортных средств. В этом случае существует вероятность того, что блок 12 распознавания цели не сможет распознать изогнутую линию La2 разметки, и что относительные положения Pz линии Lpa разметки ответвления будут ошибочно распознаны как относительное положение изогнутой линии La2 разметки. В результате, как показано на фиг. 5A, существует вероятность того, что положения Pz линии Lpa разметки ответвления относительно транспортного средства M будут ошибочно использованы при сравнении в качестве информации о положении изогнутой линии La2 разметки на карте, что приведет к снижению точности оценки продольного положения транспортного средства М. Устройство 200 локализации транспортного средства использует коэффициент увеличения ширины поворота для предотвращения снижения точности оценки продольного положения транспортного средства M, вызванного ошибкой различения линии Lpa разметки ответвления и изогнутой линии La2 разметки.
[0067] Например, коэффициент увеличения ширины поворота представляет собой коэффициент увеличения интервала (расстояния) между левой изогнутой разметкой и правой изогнутой разметкой поворота относительно ширины прямого участка дороги перед криволинейным участком полосы движения транспортного средства М. Ширину прямого участка дороги можно определить по карте или показаниям внешнего датчика 2.
[0068] Коэффициент увеличения ширины поворота можно рассчитать на основании не ширины прямого участка дороги перед поворотом, а интервала между левой изогнутой разметкой поворота и правой изогнутой разметкой поворота, определенного по показаниям внешнего датчика 2 в точке, ближайшей к входу в поворот.
[0069] <Конфигурация устройства локализации транспортного средства во втором варианте осуществления изобретения >
Как показано на фиг. 4, ЭБУ 20 локализации транспортного средства устройства 200 локализации транспортного средства отличается от ЭБУ 10 локализации транспортного средства устройства 100 локализации транспортного средства, описанного в первом варианте осуществления, тем, что добавлен блок 21 вычисления коэффициента увеличения, и что назначение блока 22 оценки продольного положения отличается от назначения блока 14 оценки продольного положения.
[0070] Когда блок 12 распознавания цели распознает относительное положение левой изогнутой разметки криволинейного участка полосы движения транспортного средства М и относительное положение правой изогнутой разметки криволинейного участка полосы движения, блок 21 вычисления коэффициента увеличения рассчитывает коэффициент увеличения ширины поворота.
[0071] На фиг. 5B изображена диаграмма, иллюстрирующая коэффициент увеличения ширины криволинейного участка. На фиг. 5В показаны интервалы D1-D3 между относительными положениями левой изогнутой разметки криволинейного участка и относительными положениями P4 правой изогнутой разметки криволинейного участка. На фиг. 5В относительные положения Pz линии Lpa разметки ответвления ошибочно распознаны в качестве относительного положения левой изогнутой разметки криволинейного участка . Интервалы D1-D3 расположены в направлении движения транспортного средства M в следующем порядке: интервал D1, интервал D2 и интервал D3 .
[0072] Например, интервал D1 может быть получен как один из интервалов (расстояние по прямой) между относительным положением Pz и относительным положением P4, распознаваемыми в виде множества точек обнаружения радарного датчика; это наиболее короткий интервал в направлении ширины между относительным положением Pz и относительным положением P4. То же самое относится к интервалам D2 и D3. Можно использовать любой другой способ поиска интервала.
[0073] Блок 21 вычисления коэффициента увеличения рассчитывает коэффициенты увеличения для интервалов D1, D2 и D3, используя в качестве опорного значения ширину прямого участка дороги перед поворотом. Ширина прямого участка перед поворотом соответствует интервалу между прямой линией La1 разметки и прямой линией Lb1 разметки. На фиг. 5В, поскольку относительное положение левой изогнутой разметки поворота получено в результате ошибочного распознавания относительных положений Pz линии Lpa разметки ответвления, каждый из интервалов D1-D3 превышает ширину прямого участка дороги.
[0074] Способ вычисления коэффициента увеличения не ограничивается описанным выше способом. Если относительное положение левой и правой изогнутой разметки поворота распознано по захваченному камерой изображению (когда изогнутая линия разметки распознается как сегмент линии), блок 21 вычисления коэффициента увеличения может рассчитать коэффициент увеличения при помощи известной обработки изображения с получением интервала между сегментами линии на изображении. В этом случае блок 21 вычисления коэффициента увеличения может рассчитать коэффициент увеличения ширины поворота на основании регулярных интервалов в направлении движения транспортного средства M.
[0075] Блок 22 оценки продольного положения не сравнивает относительное положение части, входящей в состав левой или правой изогнутой разметки поворота и имеющей коэффициент увеличения, равный или превышающий пороговый коэффициент увеличения, с информацией о положении изогнутой разметки на карте. Блок 22 оценки продольного положения не сравнивает относительное положение части, имеющей коэффициент увеличения, равный или превышающий пороговый коэффициент увеличения, с информацией о положении любой изогнутой разметки на карте. Под пороговым коэффициентом увеличения понимают заданное пороговое значение, используемое для того, чтобы определить, имеет ли место ошибка различения линии разметки ответвления и изогнутой разметки. В приведенном ниже описании часть, входящую в состав левой или правой изогнутой разметки поворота и имеющую коэффициент увеличения, равный или превышающий пороговый коэффициент увеличения, называют сравнительной нецелевой частью; с другой стороны, часть, входящую в состав левой или правой изогнутой разметки поворота и имеющую коэффициент увеличения ниже порогового коэффициента увеличения, называют сравнительной целевой частью.
[0076] На фиг. 5В, поскольку все коэффициенты увеличения ширины поворота, рассчитанные на основании интервалов D1-D3, соответствующих относительным положениям Pz, равны или превышают пороговый коэффициент увеличения, блок 22 оценки продольного положения не сравнивает относительные положения Pz, ошибочно распознанные как относительное положение левой изогнутой линии La2 разметки поворота, с информацией о положении изогнутой линии La2 разметки на карте. Кроме того, блок 22 оценки продольного положения не сравнивает относительные положения P4 правой изогнутой линии Lb2 разметки поворота, соответствующие относительным положениям Pz, с информацией о положении изогнутой линии La2 разметки на карте.
[0077] Если будет обнаружено, что существует ответвление, отходящее от поворота влево, высока вероятность того, что правая изогнутая линия Lb2 разметки поворота не является ошибочно распознанной линией разметки ответвления. Поэтому в таком случае блок 22 оценки продольного положения может сравнивать относительные положения Р4 правой изогнутой линии Lb2 разметки поворота с информацией о положении изогнутой линии La2 разметки на карте для оценки продольного положения транспортного средства M. То же самое справедливо для наличия ответвления, отходящего от поворота вправо. Блок 22 оценки продольного положения может распознавать траекторию ответвления на основании картографической информации, хранящейся в базе 4 картографических данных, и определяемое положение транспортного средства М, найденное блоком 11 сбора данных определяемого положения (или последнее оцененное положение транспортного средства).
[0078] Блок 22 оценки продольного положения оценивает продольное положение транспортного средства M основываясь на относительном положении сравнительной целевой части по отношению к транспортному средству M, отражающему поперечное положение и направление транспортного средства M, полученные блоком 13 оценки поперечного положения, и на основании информации о положении изогнутой линии разметки на карте, хранящейся в базе 5 данных целей. Блок 22 оценки продольного положения оценивает продольное положение транспортного средства M путем сравнения относительного положения части изогнутой разметки, представляющей собой левую или правую изогнутую линию разметки поворота и соответствующей сравнительной целевой части, с информацией о положении каждой изогнутой линии разметки на карте.
[0079] Следует отметить, что устройство 200 локализации транспортного средства может использовать линию разметки ответвления, соответствующую траектории ответвления, для оценки продольного положения. Под траекторией ответвления понимают дорогу (полосу движения), отходящую от главной дороги. Под линией разметки ответвления в этом случае понимают линию разметки, составляющую часть траектории ответвления и находящуюся на некотором удалении от точки разветвления дороги. Линия разметки ответвления может перекрываться изогнутой разметкой, если ее кривизна равна или превышает второе пороговое значение кривой. База 5 данных целей хранит информацию о положении линии разметки ответвления на карте в качестве второй цели.
[0080] В этом случае блок 12 распознавания цели может использовать информацию о цели, хранящуюся в базе 5 данных целей, для распознавания линии разметки ответвления. Блок 12 распознавания цели может распознавать положение линии разметки ответвления относительно транспортного средства М. Если блок 12 распознавания цели распознает относительное положение линии разметки ответвления, блок 22 оценки продольного положения определяет продольное положение транспортного средства M на основании относительного положения линии разметки ответвления и информации о положении линии разметки ответвления на карте.
[0081] На фиг. 5C изображена диаграмма, иллюстрирующая оценку продольного положения транспортного средства с использованием линии разметки ответвления. На фиг. 5С блок 12 распознавания цели распознает относительные положения Pz в качестве относительного положения линии Lpa разметки ответвления. Блок 22 оценки продольного положения оценивает продольное положение транспортного средства M путем сравнения относительных положений Pz линии Lpa разметки ответвления с информацией о положении линии Lpa разметки ответвления на карте.
[0082] На фиг. 5С блок 22 оценки продольного положения использует не только линию Lpa разметки ответвления, но и относительные положения P4 правой изогнутой линии Lb2 разметки поворота для оценки продольного положения транспортного средства M. Кроме того, если блок 12 распознавания цели распознает относительное положение левой изогнутой линии La2 разметки поворота, блок 22 оценки продольного положения может использовать относительное положение изогнутой линии La2 разметки для оценки продольного положения транспортного средства M.
[0083] <Процесс локализации транспортного средства согласно второму варианту осуществления изобретения >
Ниже будет рассмотрен процесс оценки положения транспортного средства, выполняемый устройством 200 локализации транспортного средства согласно второму варианту осуществления изобретения, со ссылкой на фиг. 6. На фиг. 6 изображена блок-схема примера осуществления локализации транспортного средства согласно второму варианту осуществления. В приведенном ниже описании обработка, выполняемая при вхождении транспортного средства М в поворот, будет описана в качестве примера процесса локализации транспортного средства согласно второму варианту осуществления.
[0084] Как показано на фиг. 6, на этапе S20 ЭБУ 20 локализации транспортного средства устройства 200 локализации транспортного средства использует блок 12 распознавания цели для распознавания относительного положения прямой линии разметки (первой цели) и относительного положения изогнутой линии разметки (второй цели). Блок 12 распознавания цели распознает прямую линию разметки, соответствующую прямому участку дороги, и изогнутую линию разметки, соответствующую криволинейному участку дороги, на основании показаний внешнего датчика 2, положения транспортного средства М, измеренного блоком 11 сбора данных определяемого положения, и информации о цели, хранящейся в базе 5 данных целей.
[0085] На этапе S22 ЭБУ 20 локализации транспортного средства использует блок 13 оценки поперечного положения для определения поперечного положения транспортного средства М и направления транспортного средства М. Блок 13 оценки поперечного положения определяет поперечное положение и направление транспортного средства M на основании положения прямой линии разметки относительно транспортного средства M и информации о положении прямой линии разметки на карте, хранящейся в базе 5 данных целей.
[0086] На этапе S24 ЭБУ 20 локализации транспортного средства использует блок 21 вычисления коэффициента увеличения для определения того, распознано ли относительное положение левой и правой изогнутой разметки кривой в полосе движения транспортного средства М. Блок 21 вычисления коэффициента увеличения выполняет вышеуказанное определение на основании результата распознавания блоком 12 распознавания цели. Если будет определено, что относительное положение левой и правой изогнутой разметки поворота не распознано (S24: НЕТ), ЭБУ 20 локализации транспортного средства переходит к этапу S26. Если будет определено, что относительное положение левой и правой изогнутой разметки поворота распознано (S24: ДА), ЭБУ 20 локализации транспортного средства переходит к этапу S28.
[0087] На этапе S26 ЭБУ 20 локализации транспортного средства использует блок 22 оценки продольного положения для оценки продольного положения транспортного средства. Блок 22 оценки продольного положения оценивает продольное положение транспортного средства M на основании положения сравнительной целевой части относительно транспортного средства M, отражающего поперечное положение и направление транспортного средства M, полученные блоком 13 оценки поперечного положения, и на основании информации о положении изогнутой линии разметки на карте. После этого ЭБУ 20 локализации транспортного средства прекращает текущую обработку. ЭБУ 20 локализации транспортного средства повторяет обработку, начиная с этапа S20, по истечении заданного времени.
[0088] На этапе S28 ЭБУ 20 локализации транспортного средства использует блок 21 вычисления коэффициента увеличения для расчета коэффициента увеличения ширины поворота. Например, блок 21 вычисления коэффициента увеличения рассчитывает коэффициент увеличения ширины поворота, взяв за основу ширину прямого участка дороги перед поворотом в полосе Rm движения транспортного средства M.
[0089] На этапе S30 ЭБУ 20 локализации транспортного средства использует блок 22 оценки продольного положения для оценки продольного положения транспортного средства. При оценке продольного положения транспортного средства блок 22 оценки продольного положения не сравнивает относительное положение сравнительной нецелевой части, входящей в состав левой и правой изогнутой разметки поворота и имеющей коэффициент увеличения, равный или превышающий пороговый коэффициент увеличения, с информацией о положении изогнутой разметки поворота на карте.
[0090] Блок 22 оценки продольного положения оценивает продольное положение транспортного средства M на основании положения сравнительной целевой части (части, коэффициент увеличения которой меньше порогового коэффициента увеличения) относительно транспортного средства M, отражающего поперечное положение и направление транспортного средства M, полученные блоком 13 оценки поперечного положения, и на основании информации о положении изогнутой линии разметки на карте. После этого ЭБУ 20 локализации транспортного средства прекращает текущую обработку. ЭБУ 20 локализации транспортного средства повторяет обработку, начиная с этапа S20, по истечении заданного времени.
[0091] <Результаты применения устройства локализации транспортного средства согласно второму варианту осуществления изобретения >
При наличии ответвления от поворота, по которому движется транспортное средство, разметка ответвления, соответствующая траектории ответвления, иногда ошибочно распознается как изогнутая линия разметки поворота. Для решения этой проблемы устройство 200 локализации транспортного средства согласно второму варианту осуществления изобретения, описанному выше, не сравнивает относительное положение части, входящей в состав левой или правой изогнутой разметки поворота и имеющей коэффициент увеличения ширины поворота, равный или превышающий пороговый коэффициент увеличения, с информацией о положении изогнутой разметки на карте. Таким образом, устройство 200 локализации транспортного средства может предотвратить снижение точности оценки продольного положения транспортного средства, вызванное ошибкой различения линии разметки ответвления и изогнутой линии разметки.
[0092] Кроме того, если линия разметки ответвления входит в состав второй цели в базе 5 данных целей, устройство 200 локализации транспортного средства может оценивать продольное положение транспортного средства М с использованием линии разметки ответвления. Это позволяет устройству 200 локализации транспортного средства оценивать продольное положение транспортного средства M с использованием линии разметки ответвления, даже если изогнутая линия разметки не может быть распознана надлежащим образом.
[0093] В тексте заявки были описаны предпочтительные варианты осуществления настоящего изобретения, не носящие ограничительного характера. Настоящее изобретение может быть реализовано не только в описанных выше вариантах осуществления, но и в отличающихся вариантах с внесением изменений и усовершенствований на основании знаний специалистов в данной области техники.
[0094] Например, устройство 100 или 200 локализации транспортного средства может входить в состав системы автопилота. В этом случае функции ЭБУ 10 или 20 локализации транспортного средства могут выполняться ЭБУ 50 автономного управления.
[0095] Положение транспортного средства (поперечное и продольное), определенное устройством 100 или 200 локализации транспортного средства, используется не только для автономного управления транспортным средством. Положение транспортного средства может также использоваться системой помощи водителю или для указания маршрута водителю. ЭБУ 10 или 20 локализации транспортного средства может быть подключен не к ЭБУ 50 автономного управления, а к ЭБУ системы помощи водителю, осуществляющему известное управление системой помощью водителю, или к известной навигационной системе.
[0096] Хотя локализация транспортного средства при вхождении транспортного средства М в поворот описана на фиг. 2А-2С, настоящее изобретение может также применяться при выходе транспортного средства М из поворота (когда транспортное средство М выходит из поворота и далее движется по прямому участку дороги). В этом случае устройство 100 локализации транспортного средства может оценивать поперечное положение и направление транспортного средства М с использованием прямой линии разметки сбоку от транспортного средства М, а затем оценивать продольное положение транспортного средства М с использованием изогнутых линий разметки сзади от транспортного средства М.
[0097] В первом варианте осуществления не всегда необходимо включать прямую линию разметки в первую цель и изогнутую линию разметки во вторую цель.
[0098] Линия разметки ответвления может быть включена во вторую цель в том числе в устройстве 100 локализации транспортного средства в первом варианте осуществления. Блок 14 оценки продольного положения может оценивать продольное положение транспортного средства на основании относительного положения линии разметки ответвления и информации о положении линии разметки ответвления на карте.
[0099] В первом варианте осуществления блок 13 оценки поперечного положения может оценивать поперечное положение и направление транспортного средства М с использованием прямой линии разметки полосы, отличающейся от полосы Rm движения транспортного средства М (например, соседней полосы по отношению к полосе Rm движения). Аналогичным образом блок 14 оценки продольного положения может оценивать продольное положение транспортного средства М с использованием изогнутой линии разметки полосы, отличающейся от полосы Rm движения транспортного средства М.
[0100] Во втором варианте осуществления изобретения, если обнаружено ответвление, отходящее от поворота влево, и линия разметки ответвления сохранена в базе 5 данных целей в качестве второй цели, блок 22 оценки продольного положения может сравнивать относительное положение сравнительной нецелевой части, входящей в состав левой изогнутой разметки поворота и имеющей коэффициент увеличения, равный или превышающий пороговый коэффициент увеличения, с информацией о положении линии разметки ответвления на карте для определения продольного положения транспортного средства. Аналогичным образом, если обнаружено ответвление, отходящее от поворота вправо, и линия разметки ответвления сохранена в базе 5 данных целей в качестве второй цели, блок 22 оценки продольного положения может сравнивать относительное положение сравнительной нецелевой части, входящей в состав правой изогнутой разметки поворота и имеющей коэффициент увеличения, равный или превышающий пороговый коэффициент увеличения, с информацией о положении линии разметки поворота ответвления на карте для определения продольного положения транспортного средства.
Изобретение относится к устройству локализации транспортного средства. Устройство содержит: базу данных целей, блок распознавания цели, блоки оценки поперечного и продольного положений. База данных целей хранит информацию о местоположении первой и второй целей на карте. Первая цель содержит прямую линию разметки, соответствующую прямому участку дороги, а вторая цель содержит минимум одну изогнутую линию разметки, соответствующую криволинейному участку дороги. Блок распознавания цели выполнен с возможностью распознавания положения прямой линии разметки относительно транспортного средства и положения минимум одной изогнутой линии разметки относительно транспортного средства на основании результатов распознавания встроенным датчиком транспортного средства. Блок оценки поперечного положения выполнен с возможностью анализа поперечного положения и направления транспортного средства на основании положения прямой линии разметки относительно транспортного средства и информации о местоположении прямой линии разметки на карте. Под поперечным положением транспортного средства понимают положение транспортного средства на карте в направлении ширины полосы, по которой движется транспортное средство. Блок оценки продольного положения выполнен с возможностью анализа продольного положения транспортного средства на основании положения минимум одной изогнутой линии разметки относительно транспортного средства и информации о местоположении минимум одной изогнутой линии разметки на карте. Положение изогнутой линии разметки относительно транспортного средства отражает поперечное положение и направление транспортного средства. Под продольным положением транспортного средства понимают положение транспортного средства на карте в направлении продолжения полосы движения. Достигается предоставление устройства, выполненного с возможностью предотвращения снижения точности определения положения транспортного средства. 3 з.п. ф-лы, 10 ил.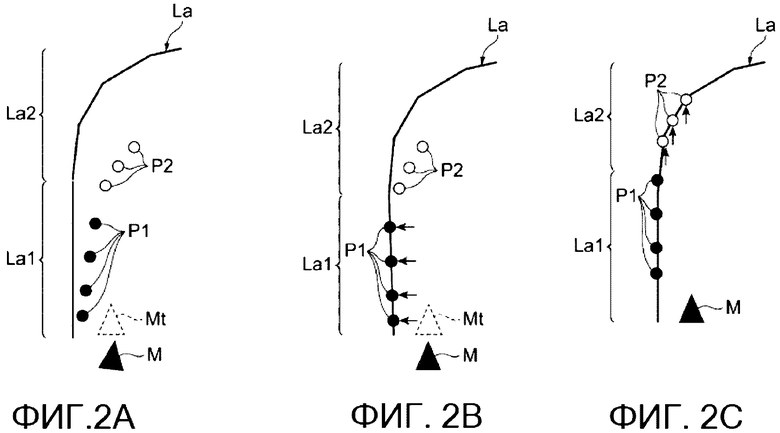
1. Устройство локализации транспортного средства, содержащее:
базу данных целей, в которой хранится информация о местоположении первой цели на карте и информация о местоположении второй цели на карте, причем первая цель содержит прямую линию разметки, соответствующую прямому участку дороги, а вторая цель содержит по меньшей мере одну изогнутую линию разметки, соответствующую криволинейному участку дороги;
блок распознавания цели, выполненный с возможностью распознавания положения прямой линии разметки относительно транспортного средства и положения по меньшей мере одной изогнутой линии разметки относительно транспортного средства на основании результатов распознавания встроенным датчиком транспортного средства;
блок оценки поперечного положения, выполненный с возможностью анализа поперечного положения и направления транспортного средства на основании положения прямой линии разметки относительно транспортного средства и информации о местоположении прямой линии разметки на карте, причем под поперечным положением транспортного средства понимают положение транспортного средства на карте в направлении ширины полосы, по которой движется транспортное средство; и
блок оценки продольного положения, выполненный с возможностью анализа продольного положения транспортного средства на основании положения по меньшей мере одной изогнутой линии разметки относительно транспортного средства и информации о местоположении по меньшей мере одной изогнутой линии разметки на карте, причем положение по меньшей мере одной изогнутой линии разметки относительно транспортного средства отражает поперечное положение и направление транспортного средства, причем под продольным положением транспортного средства понимают положение транспортного средства на карте в направлении продолжения полосы движения.
2. Устройство локализации транспортного средства по п. 1, отличающееся тем, что дополнительно содержит
блок вычисления коэффициента увеличения, выполненный с возможностью вычисления коэффициента увеличения ширины поворота, когда блок распознавания цели обнаруживает (i) относительное положение левой изогнутой линии разметки, соответствующей криволинейному участку полосы движения, и (ii) относительное положение правой изогнутой линии разметки, соответствующей криволинейному участку полосы движения, причем левая изогнутая линия разметки входит по меньшей мере в одну изогнутую линию разметки, правая изогнутая линия разметки входит по меньшей мере в одну изогнутую линию разметки, причем
блок оценки продольного положения настроен таким образом, чтобы он не сравнивал относительное положение части, входящей в состав левой или правой изогнутой линии разметки, причем коэффициент увеличения этой части равен или превышает заданный предельный коэффициент увеличения, с информацией о положении по меньшей мере одной изогнутой линии разметки на карте.
3. Устройство локализации транспортного средства по п. 2, отличающееся тем, что
блок вычисления коэффициента увеличения выполнен с возможностью вычисления коэффициента увеличения расстояния между левой изогнутой линией разметки и правой изогнутой линией разметки относительно ширины прямого участка дороги в качестве коэффициента увеличения ширины поворота.
4. Устройство локализации транспортного средства по любому из пп. 1-3, отличающееся тем, что
в базе данных целей вторая цель содержит линию разметки ответвления, соответствующую траектории ответвления, и
блок оценки продольного положения выполнен с возможностью оценки продольного положения транспортного средства на основании положения линии разметки ответвления относительно транспортного средства и информации о положении линии разметки ответвления на карте, причем положение линии разметки ответвления относительно транспортного средства отражает поперечное положение и направление транспортного средства.
| EP 2918974 A1, 16.09.2015 | |||
| US 7898437 B2, 01.03.2011 | |||
| WO 2016031036 A1, 03.03.2016 | |||
| US 8085984 B2, 27.12.2011 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ГРАНИЦ ДОРОГИ, ФОРМЫ И ПОЛОЖЕНИЯ ОБЪЕКТОВ, НАХОДЯЩИХСЯ НА ДОРОГЕ, И УСТРОЙСТВО ДЛЯ ЕГО ВЫПОЛНЕНИЯ | 2012 |
|
RU2571871C2 |

