Изобретение относится к конструкции автоматической станции зарядки и обслуживания многовинтовых беспилотных летательных аппаратов и многовинтового беспилотного летательного аппарата, работающего совместно с ней, и может быть использовано для создания сети обслуживания БПЛА, что позволит выполнять различные задачи с использованием БПЛА, дальность полета которых ограничена емкостью аккумулятора.
Зарядка аккумулятора и обслуживание БПЛА в автоматическом режиме требуют точного позиционирования и ориентации БПЛА на посадочной платформе. Неопределенность позиционирования возникает вследствие неточности работы системы управления процессом посадки и таких погодных факторов, как порывистый ветер, туман, снег, дождь, которые как правило ухудшают процесс наведения или вводят неточности в последний момент посадки БПЛА, когда система управления уже не в состоянии провести корректировки местоположения садящегося аппарата с необходимой точностью.
Известны автоматические станции зарядки и обслуживания БПЛА, в которых после посадки на платформу производится корректировка его местоположения каким-либо активным устройством (манипулятором).
Автоматическая станция, согласно заявке US 2014/0124621 А1, принимает БПЛА на плоскую посадочную платформу. После посадки БПЛА механизм выравнивания перемещает четырьмя планками БПЛА в зону позиционирования, в которой осуществляется зарядка, замена аккумулятора или иной вид обслуживания. Для лучшего обслуживания БПЛА может дополнительно фиксироваться специальным устройством или механизмом выравнивания.
Автоматическая станция, согласно заявке US 2014/0319272 А1, также принимает БПЛА на плоскую посадочную платформу, однако после этого БПЛА с помощью двух планок выводит аппарат их зоны посадки в зону зарядки и обслуживания.
Данные устройства имеют возможность принимать БПЛА обычной конструкции, которые способны приземлиться на любую поверхность, однако конструкция станции получается сложной.
Известны автоматические станции зарядки и обслуживания БПЛА, содержащие пассивные устройства позиционирования БПЛА при приземлении. Конструкция устройства позиционирования, как правило, рассчитана на данный тип БПЛА. Сам БПЛА имеет возможность приземления как на данную станцию, так и любую другую горизонтальную поверхность.
Автоматическая станция, согласно патенту US 9,139,310 В1, содержит конические углубления на посадочной платформе по местам расположения шасси БПЛА. Данная конструкция позиционирует БПЛА, если отклонение от точки посадки не более радиуса конуса в верхней части. Данная конструкция способна принимать аппараты с таким же расположением шасси.
Доставочная платформа для беспилотных транспортных средств, согласно US 2015/0175276 А1, имеет выступающий над посадочной поверхностью усеченную пирамиду-основание, которой равно расстоянию посадочных лыж БПЛА. При посадке взаимодействие опорных лыж БПЛА и пирамиды приводит к необходимому позиционированию.
Посадочная платформа для БПЛА, согласно US D805,018 S, выполнена по размеру расположения опор БПЛА и имеет вокруг наклонные поверхности. После посадки БПЛА скатывается по этим поверхностям и позиционируется на посадочной платформе. Указанные конструкции станции, как правило, не содержат устройств удержания аппарата на посадочной платформе.
Известны автоматические станции зарядки и обслуживания БПЛА, содержащие пассивные устройства позиционирования БПЛА при приземлении, в которых конструкция устройства позиционирования рассчитана на данный тип посадочного устройства БПЛА. Сам БПЛА имеет посадочное устройство, рассчитанное на взаимодействие с устройством позиционирования станции, и поэтому аппарат, как правило, не имеет возможность приземления на другие устройства или горизонтальную поверхность.
Посадочное устройство БПЛА, согласно US 9,499,265 В2, содержит посадочную платформу в виде конического углубления, в котором установлены контакты для зарядки аккумулятора, сменный аккумулятор и другие устройства. БПЛА имеет кольцевую опору, от которой поднимаются ножки, образующие каркас направленной острием вниз усеченной пирамиды. Точность позиционирования при посадке обеспечивается взаимодействием кольцевой опоры и ножек с коническим углублением. Позиционирование по вертикальной оси вращения достигается вращением опорной поверхности посадочной платформы вокруг вертикальной оси. Источник предусматривает возможность выполнения посадочной праформы в виде многоугольника. В этом случае опора БПЛА должна иметь ту же форму, и это позволяет обеспечить нужную ориентацию без вращения опорной поверхности посадочной платформы.
Система стыковки с воздушным транспортным средством US 9,561,871 В2 включает в себя посадочную площадку и воздушное транспортное средство. У посадочной площадки имеется опускающаяся к центру коническая поверхность. В центре имеется углубление по размерам посадочной поверхности воздушного транспортного средства. В воздушном транспортном средстве имеется посадочная поверхность с колесами. Выступ и посадочное устройство размещены на нижней поверхности воздушного судна. После посадки на коническую поверхность воздушное транспортное средство скатывается к центру, и ее посадочная поверхность опускается в центральное углубление. На воздушном транспортном средстве и посадочной площадке имеются контакты для подачи напряжения для зарядки аккумулятора, которые контактируют между собой.
Прототипом изобретения является посадочное устройство БПЛА, согласно US 2016/00395.41 А1, которое содержит посадочную площадку, выполненную в виде короны, посадочное устройство БПЛА в виде двух расположенных накрест стержней. Во впадинах размещены контакты для подачи зарядного напряжения, на посадочных стержнях размещены ответные контакты. Посадочная платформа имеет механизмы для фиксации посадочных стержней. На посадочной платформе содержатся источники излучения, на БПЛА видеокамера или датчики излучения.
БПЛА подлетает к посадочному устройству и садится, ориентируясь на расположенные на нем источники излучения. Неточность посадки, которая может быть вызвана неточностью работы системы посадки или порывами ветра, нивелируется при взаимодействии поверхности посадочной площадки и посадочных стержней БПЛА за счет пассивного гравитационного центрирования.
Устройства данного типа достаточно просты и обеспечивают наилучшее взаимодействие системы посадочная платформа - БПЛА, однако сам БПЛА имеет посадочное устройство, рассчитанное на взаимодействие только со своей станцией, и не имеет возможность приземления на другие устройства или горизонтальную поверхность.
Прототипом БПЛА является многовинтовой беспилотный летательный аппарат CN206704520U, содержащий шасси, которые с помощью привода могут принимать посадочное и полетное положения. При посадочном положении шасси направлены вертикально или почти вертикально вниз, при полетном положении шасси расходятся веером и принимают горизонтальное положение.
Техническим результатом является упрощение процесса зарядки и обслуживания многовинтового беспилотного летательного аппарата в автоматическом режиме путем обеспечения точного позиционирования БПЛА при посадке.
Упрощение процесса позиционирования многовинтового беспилотного летательного аппарата за счет обеспечения корректировки местоположения садящегося БПЛА относительно посадочной платформы.
Упрощение конструкции автоматической станции зарядки и обслуживания многовинтового беспилотного летательного аппарата и используемого вместе с ним многовинтового беспилотного летательного аппарата.
Обеспечение возможности взлета и посадки используемого многовинтового беспилотного летательного аппарата вне станции, в том числе с плоскости или посадочной платформы с направляющими воронками.
Технический результат достигается тем, что в автоматической станции зарядки и обслуживания многовинтовых беспилотных летательных аппаратов, содержащей посадочную платформу с посадочными огнями и/или маркерами, контакты подачи напряжения для зарядки аккумулятора, блок питания и блок управления в соответствии с предложенным решением посадочная платформа выполнена в виде полого многогранника, внутренняя поверхность которого повторяет наружную поверхность, с количеством вершин, равным количеству шасси многовинтового беспилотного летательного аппарата.
Другой результат достигается тем, что в автоматической станции зарядки и обслуживания многовинтовых беспилотных летательных аппаратов, содержащей посадочную платформу, установленную на опорах, контакты подачи напряжения, блок питания и блок управления, в соответствии с предложенным решением на опорах установлен по крайней мере один вибратор.
Еще один результат достигается тем, что в автоматической станции зарядки и обслуживания многовинтовых беспилотных летательных аппаратов, содержащей посадочную платформу, установленную на держателе, контакты подачи напряжения, блок питания и блок управления, в соответствии с предложенным решением на держателе установлен по крайней мере один вибратор.
Кроме того, контакты для подачи напряжения для зарядки аккумулятора, посадочные огни или маркеры расположены по поверхности посадочной платформы.
Кроме того, контакты для подачи зарядного напряжения установлены на вершинах и/или гранях многогранника.
Многовинтовой беспилотный летательный аппарат, содержащий корпус, лучи с двигателями и воздушными винтами, аккумулятор, контакты для подачи напряжения и шасси, выполненные подвижными, имеющие положение «на земле», при котором шасси установлены вертикально вниз, «полетное» положение, при котором шасси разнесены максимально в стороны, согласно предложенному решению шасси дополнительно имеют положение «взлета/посадки», при котором шасси сведены вниз к центру с образованием обращенной вниз пирамиды, а также положение «нахождения на посадочной платформе», при которой шасси раздвинуты до касания нижней поверхности посадочной платформы и поджатая ими электрических контактов, находящихся на посадочной платформе и на БПЛА.
Многовинтовой беспилотный летательный аппарат, содержащий корпус, лучи с двигателями и воздушными винтами, аккумулятор, контакты для подачи напряжения и шасси, выполненные подвижными, имеющие положение «на земле», при котором шасси установлены вертикально вниз, «полетное» положение, при котором шасси разнесены максимально в стороны, согласно предложенному решению шасси дополнительно имеют положение «взлета/посадки», при котором шасси сведены вниз к центру с образованием обращенной вниз усеченной пирамиды, а также положение «нахождения на посадочной платформе», при которой шасси раздвинуты до касания нижней поверхности посадочной платформы и поджатая ими электрических контактов, находящихся на посадочной платформе и на БПЛА.
Кроме того, контакты для подачи напряжения, установленные на упругом основании, расположены на корпусе, над осевой линией шасси, при их полетном положении.
Кроме того, контакты для подачи напряжения, установленные на упругом основании, расположены на лучах над осевой линией шасси, при их полетном положении.
Кроме того, контакты для подачи зарядного напряжения расположены на корпусе на линии контакта со сторонами посадочной платформы в положении посадки.
Сущность изобретения поясняется следующим графическим материалом.
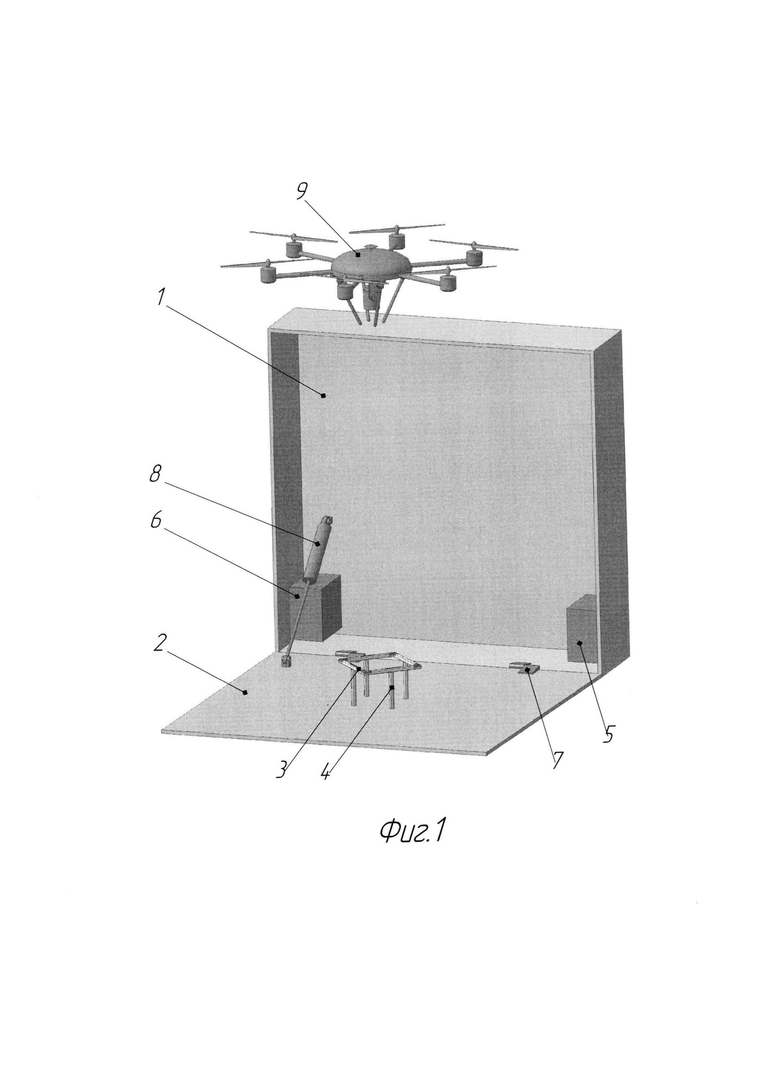
На фиг. 1 изображена автоматическая станция зарядки и обслуживания многовинтовых беспилотных летательных аппаратов с посадочной платформой, установленной на опоры.
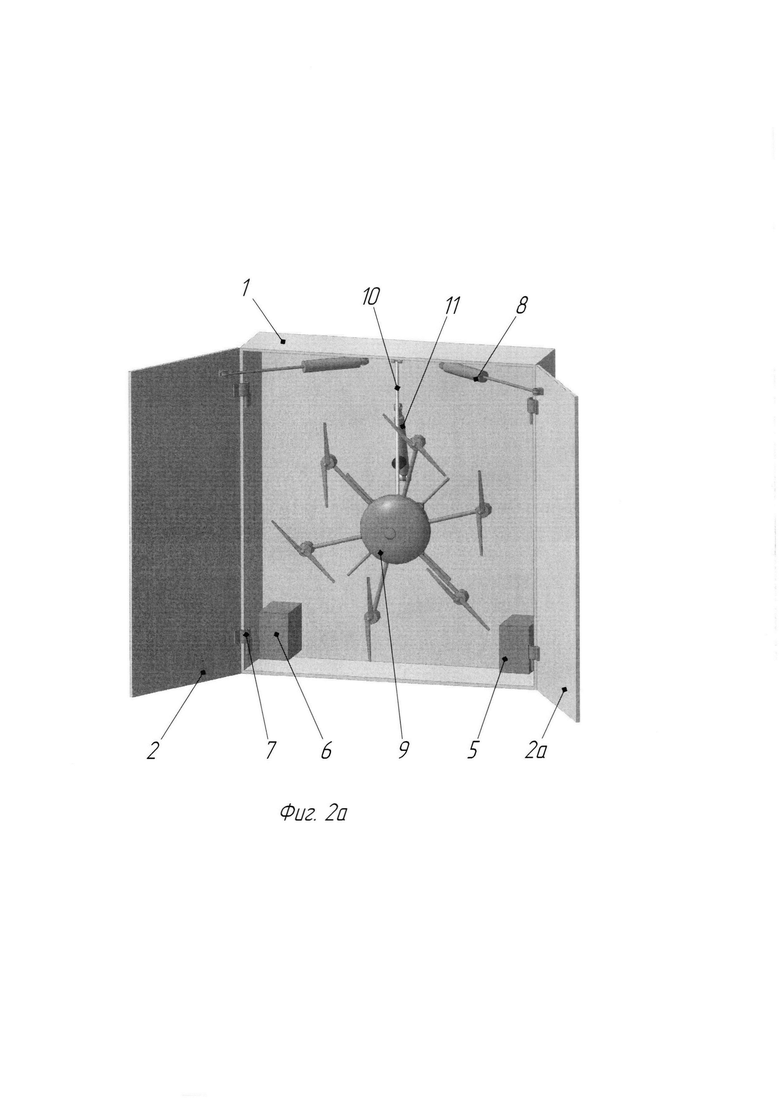
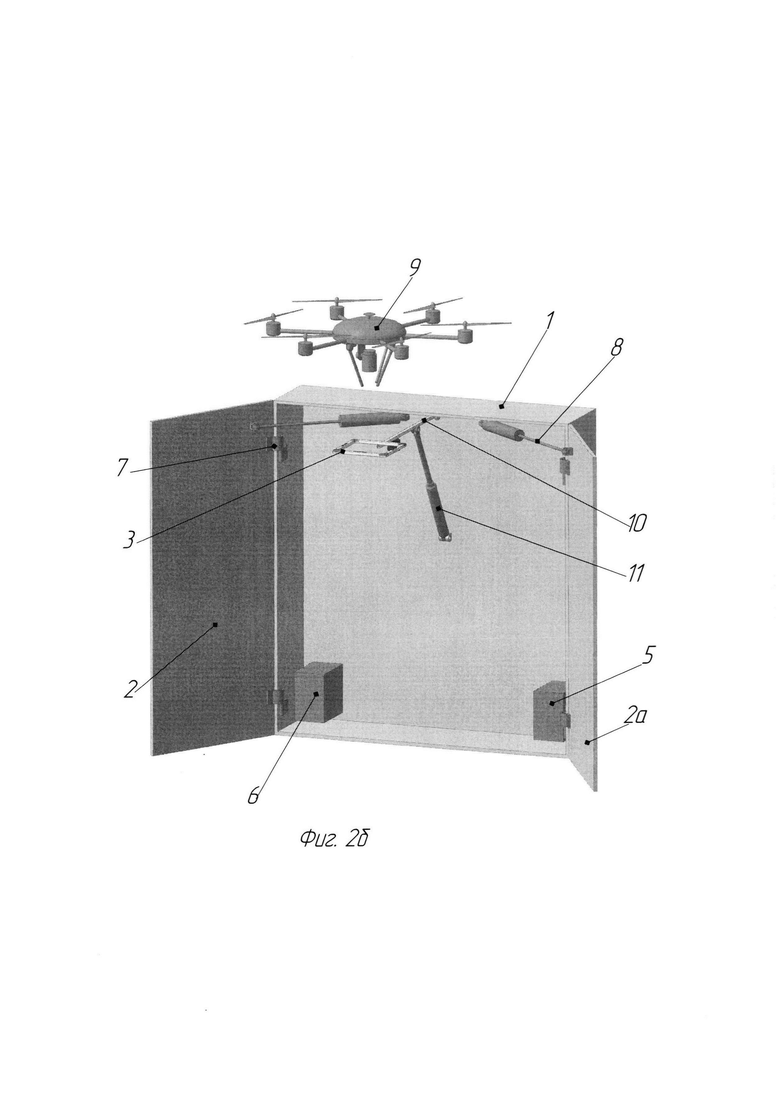
На фиг. 2а изображена автоматическая станция зарядки и обслуживания многовинтовых беспилотных летательных аппаратов с посадочной платформой, установленной на держателе, в положении хранения аппарата; на фиг 2б - в положении приема и отправления аппарата.
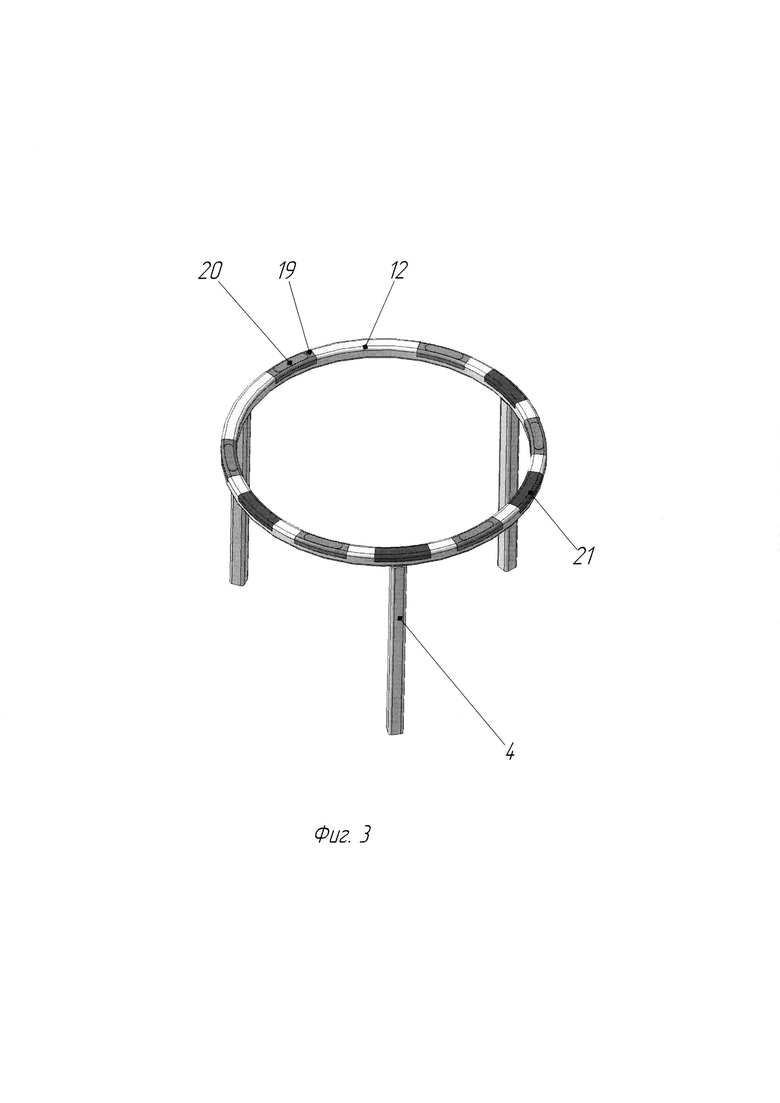
На фиг. 3 изображена посадочная платформа, выполненная в виде кольца, установленного на опоры.
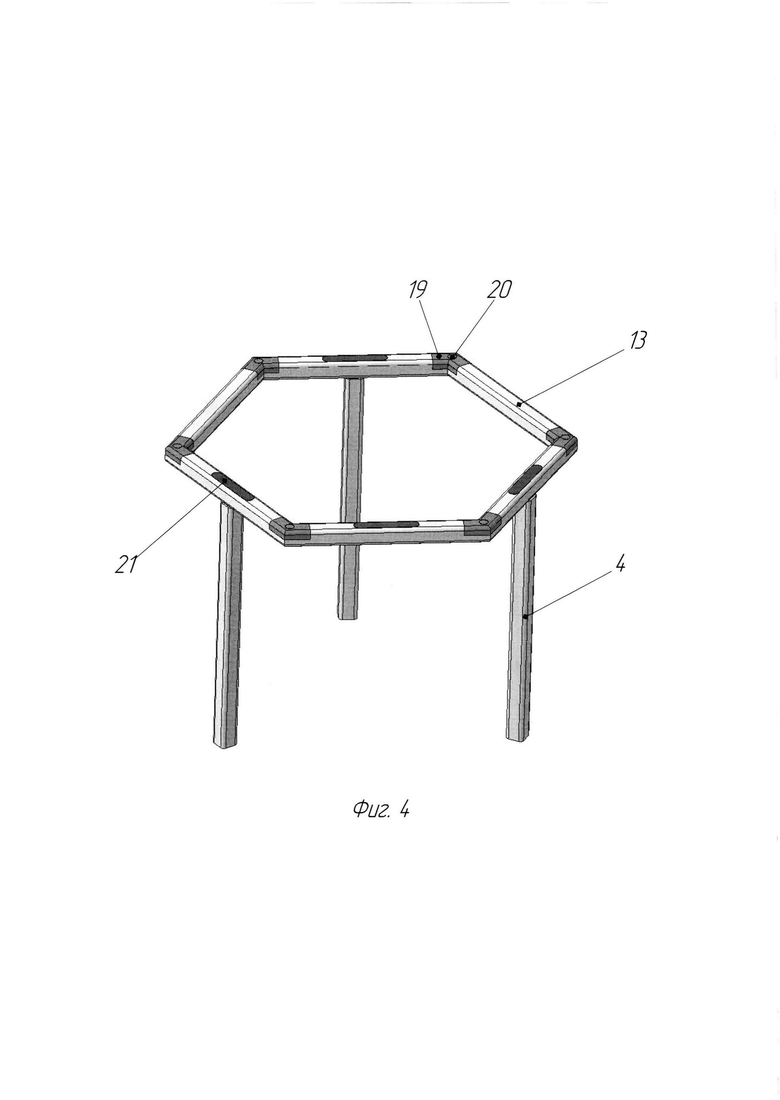
На фиг. 4 изображена посадочная платформа, выполненная в виде многогранника по числу шасси многовинтового беспилотного летательного аппарата.
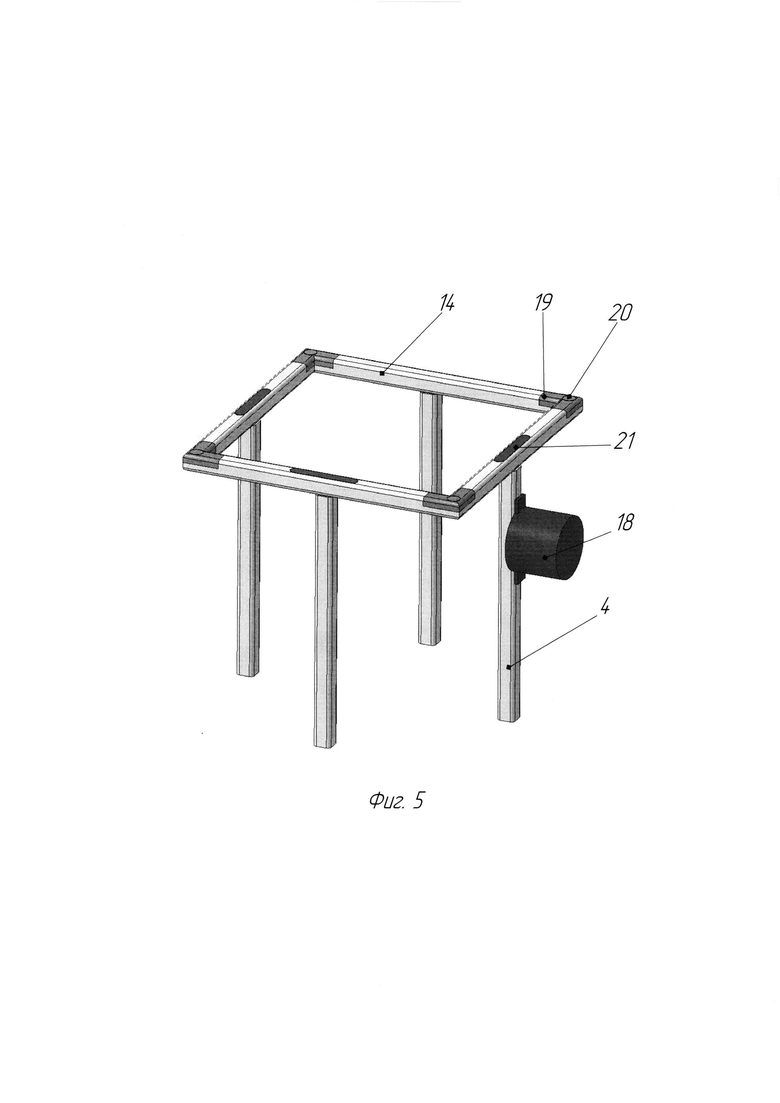
На фиг. 5 изображена посадочная платформа, выполненная в виде квадрата, установленного на опоры.
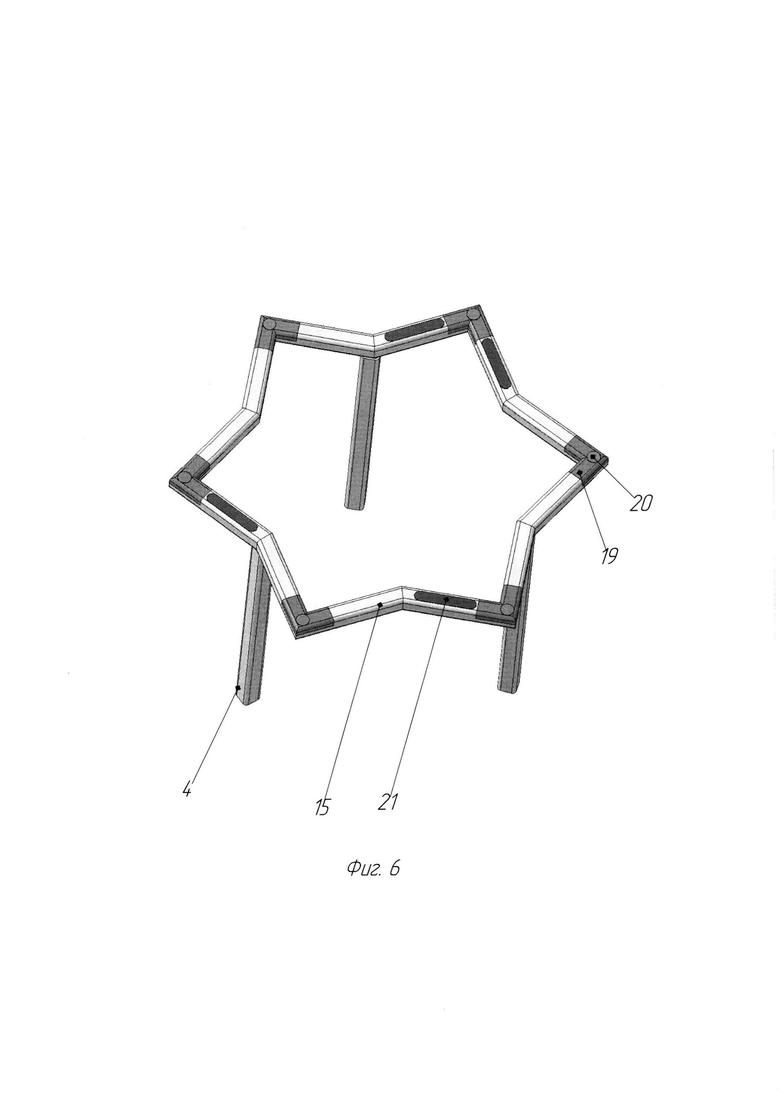
На фиг. 6 изображена посадочная платформа, выполненная в виде шестигранной звезды, установленной на опоры.
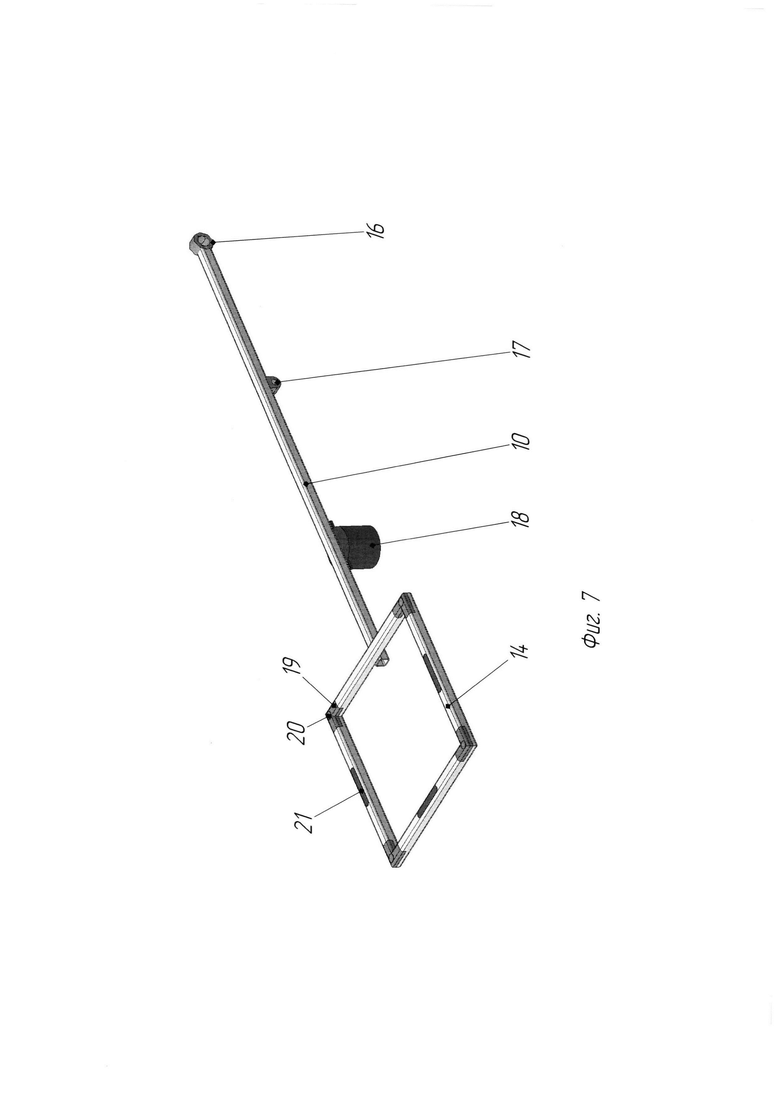
На фиг. 7 изображена посадочная платформа, выполненная в виде квадрата, установленного на держателе.
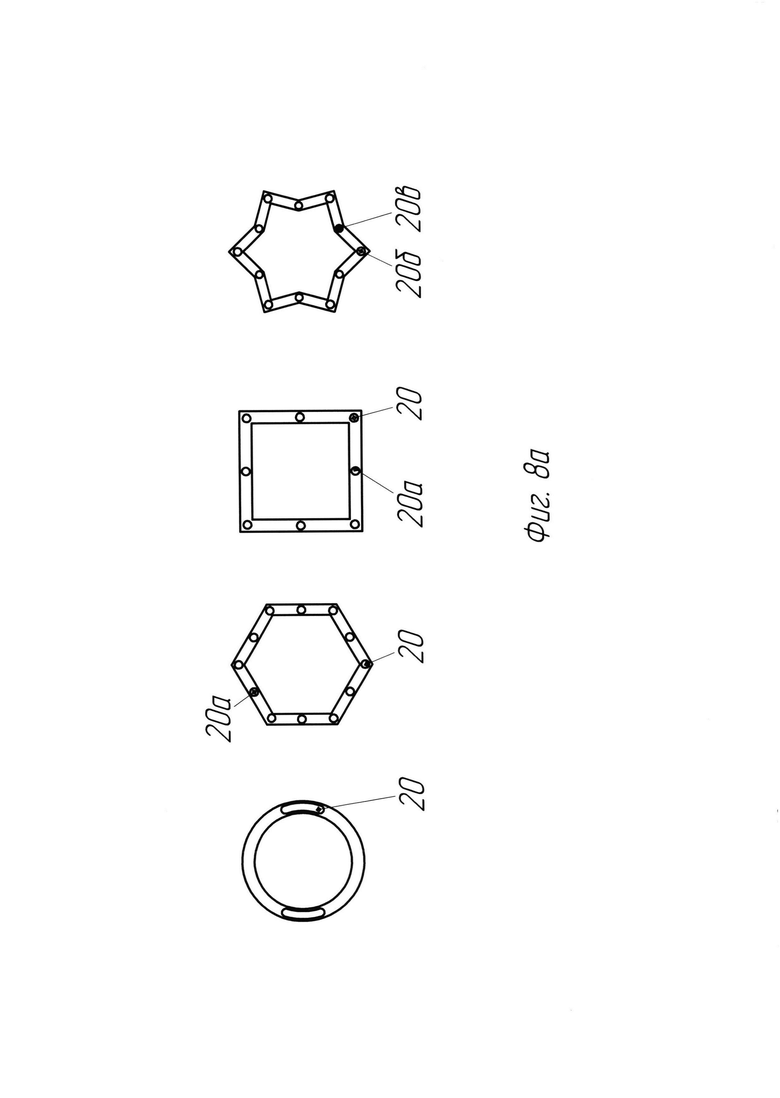
На фиг. 8а изображены варианты размещения контактов на посадочной платформе.
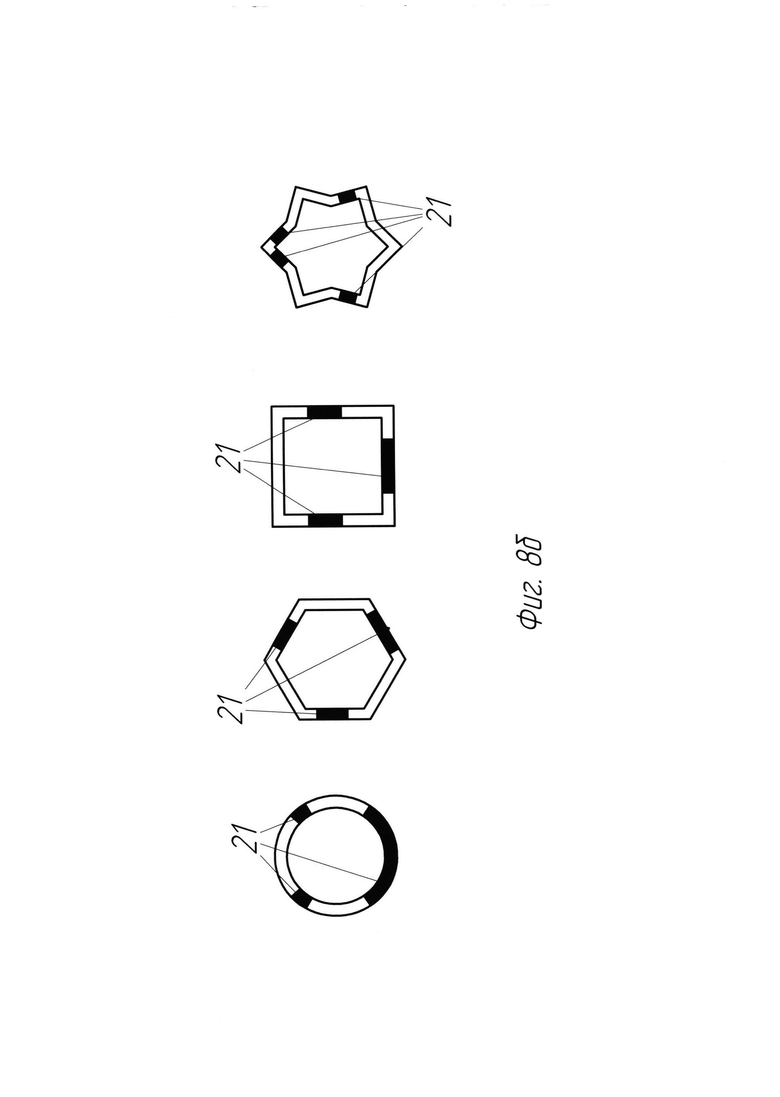
На фиг. 8б изображены варианты размещения посадочных огней и маркеров на посадочной платформе.
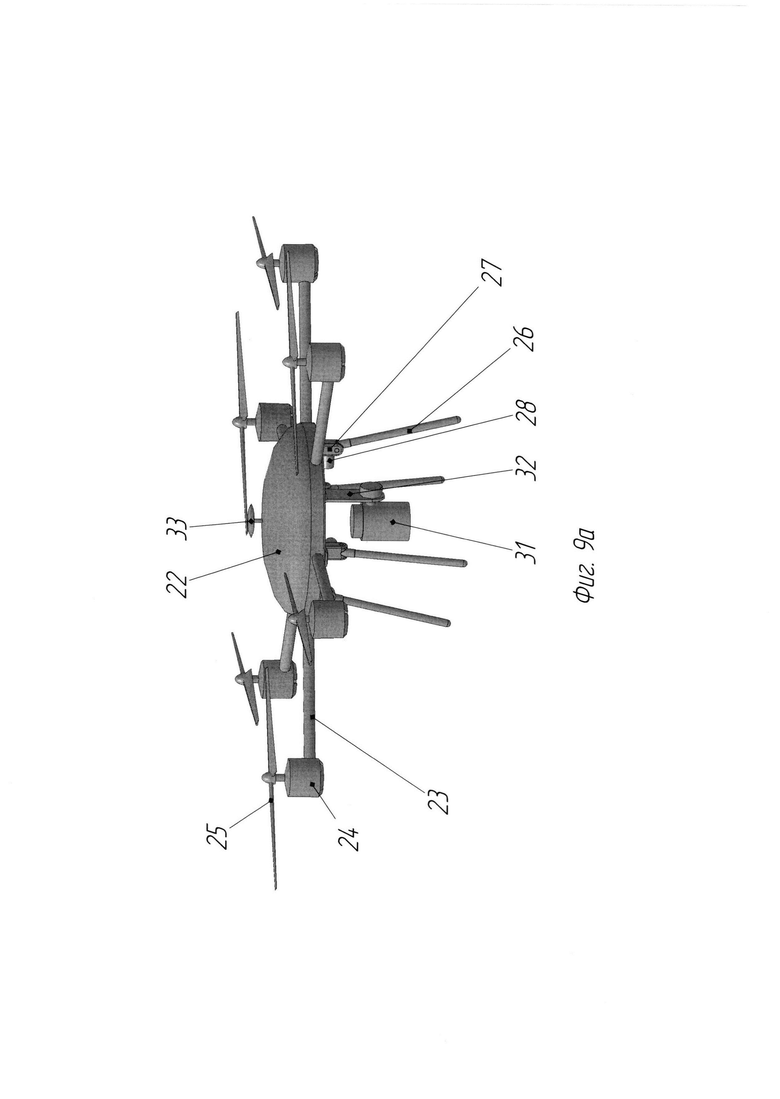
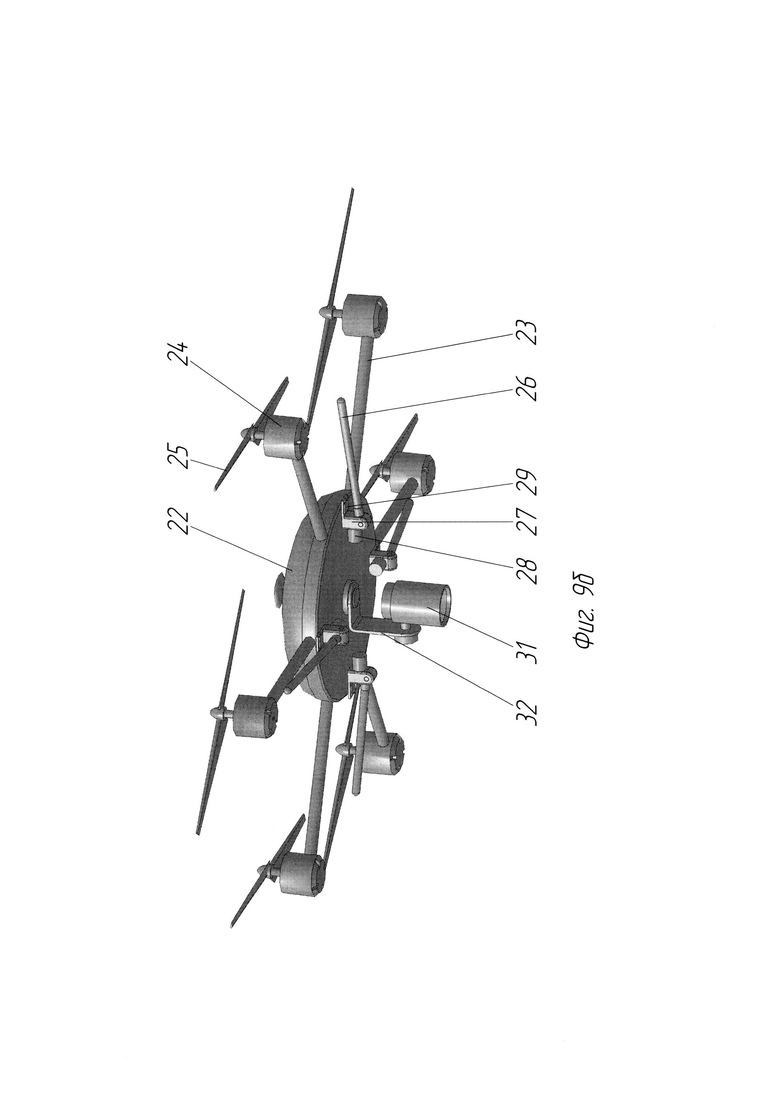
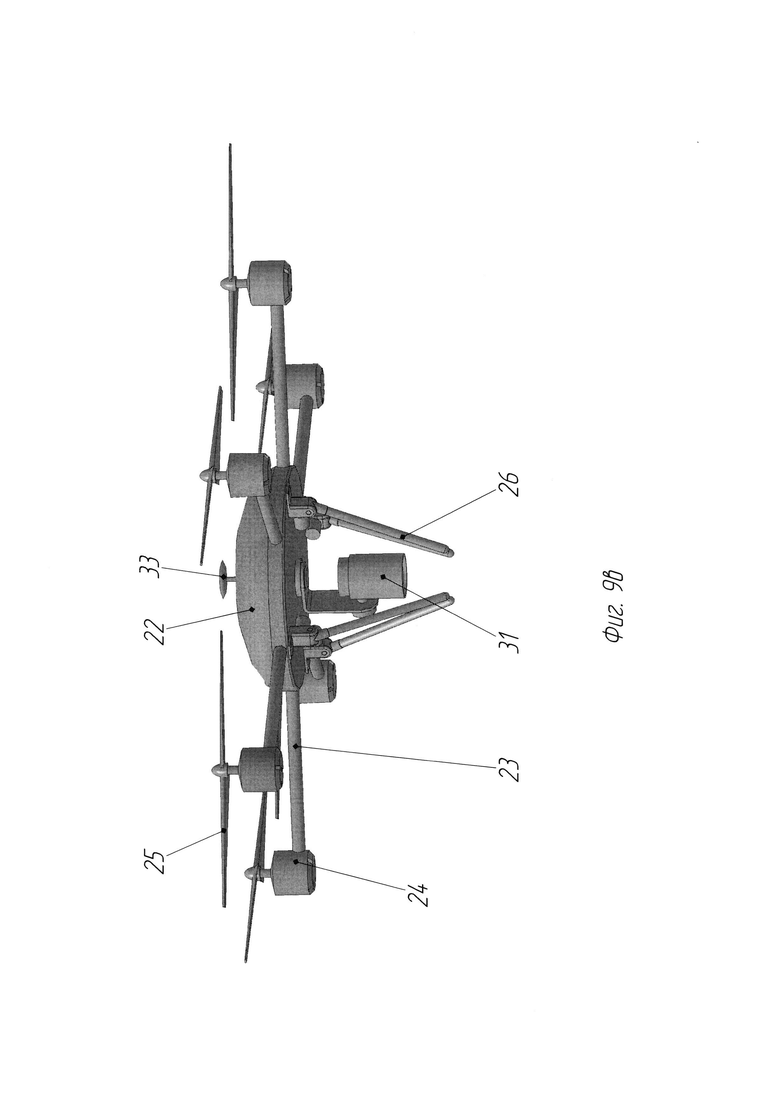
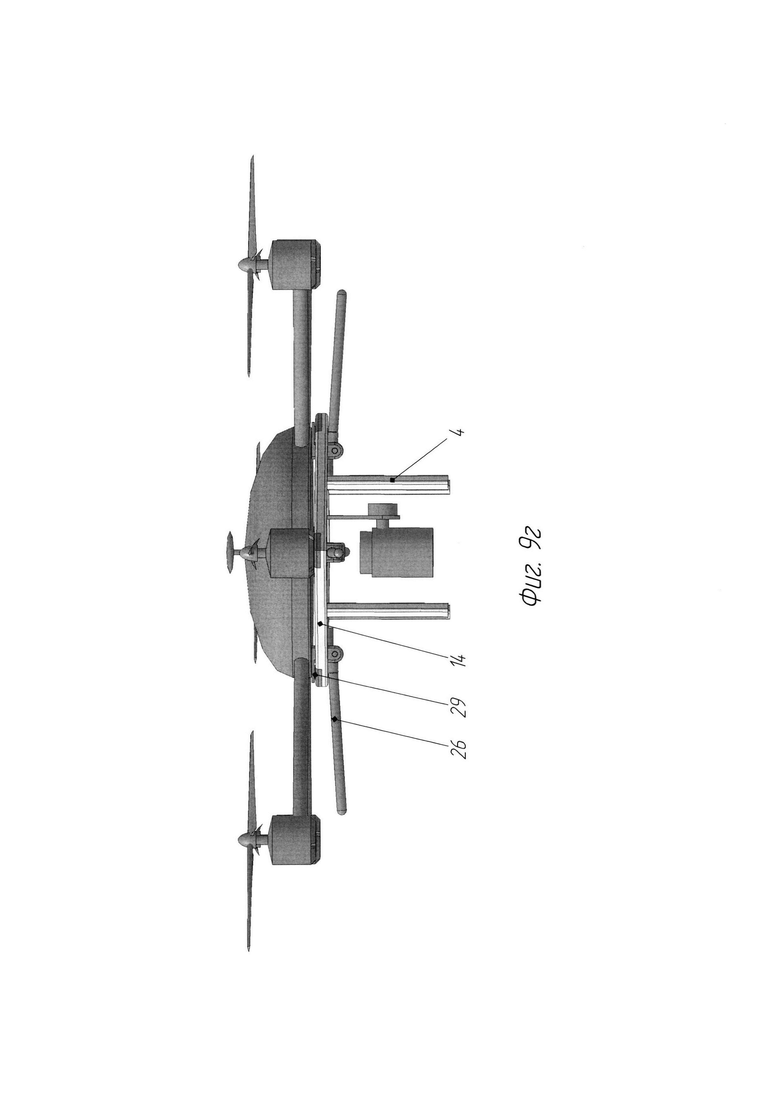
На фиг. 9а-9г изображен многовинтовой беспилотный летательный аппарат в различных положениях: 9а - общий вид; 9б - в полете; 9в - при взлете/заходе на посадку на посадочную платформу; 9г - в положении, когда аппарат установлен и зафиксирован на посадочной платформе.
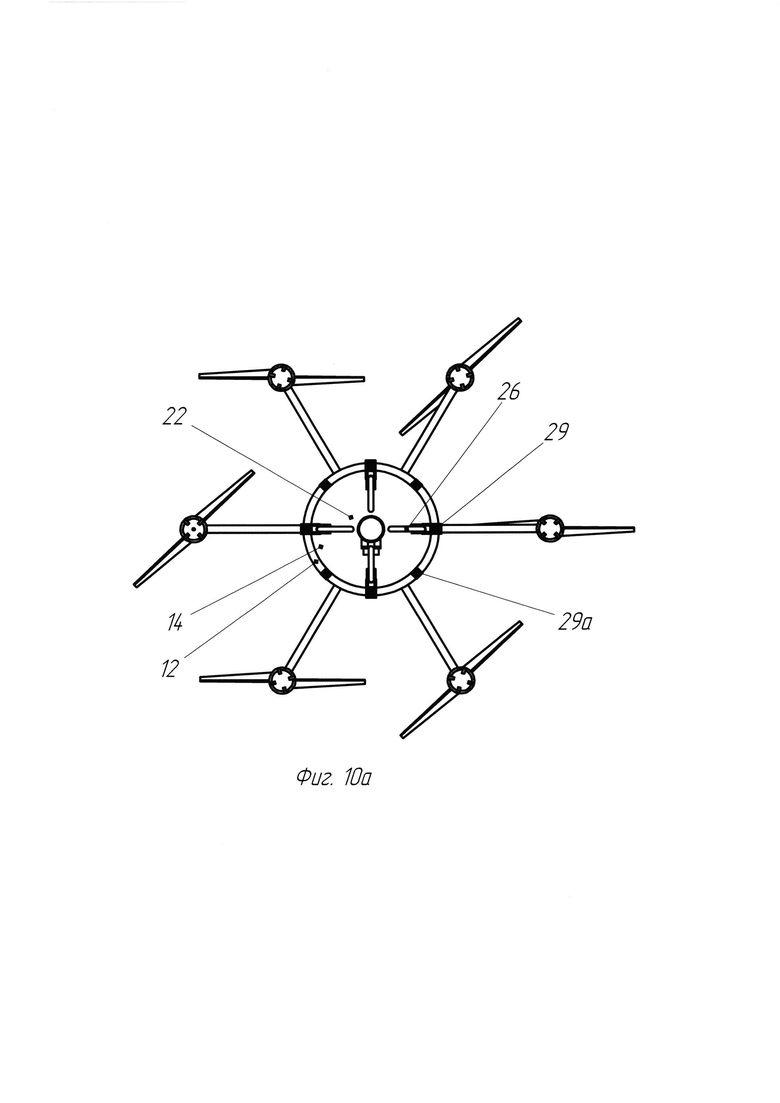
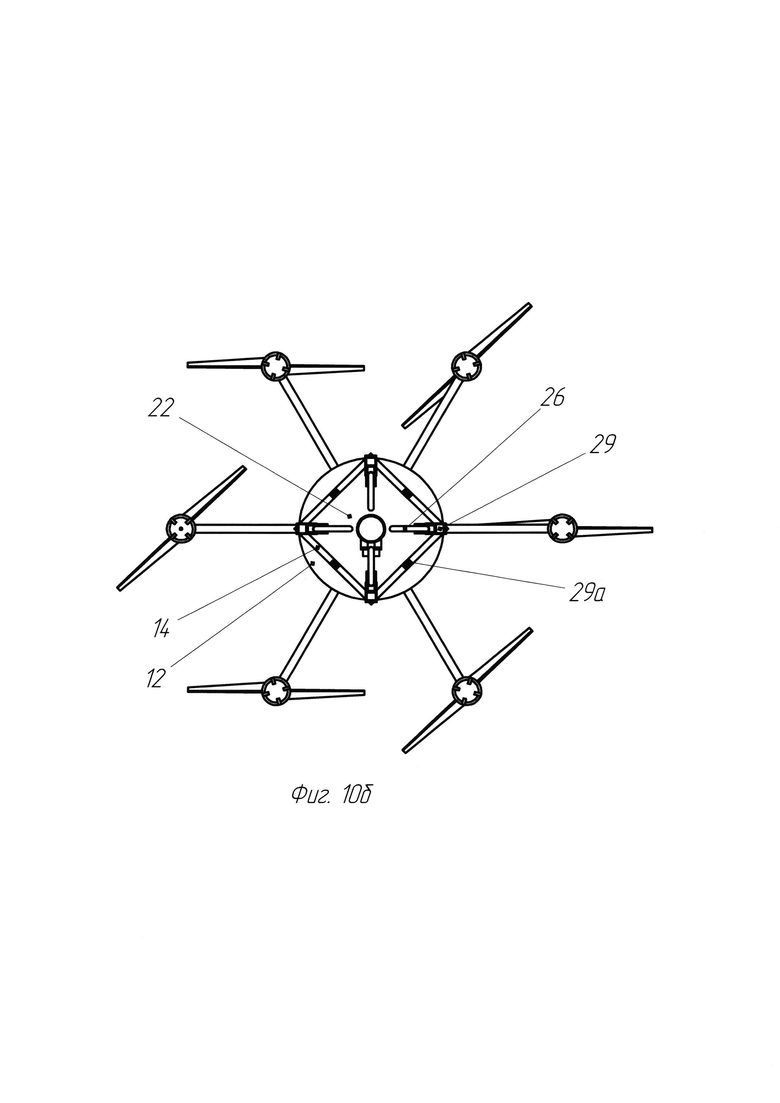
На фиг. 10а и 10б изображены возможные варианты расположение контактов для зарядки аккумулятора на БПЛА (вид снизу).
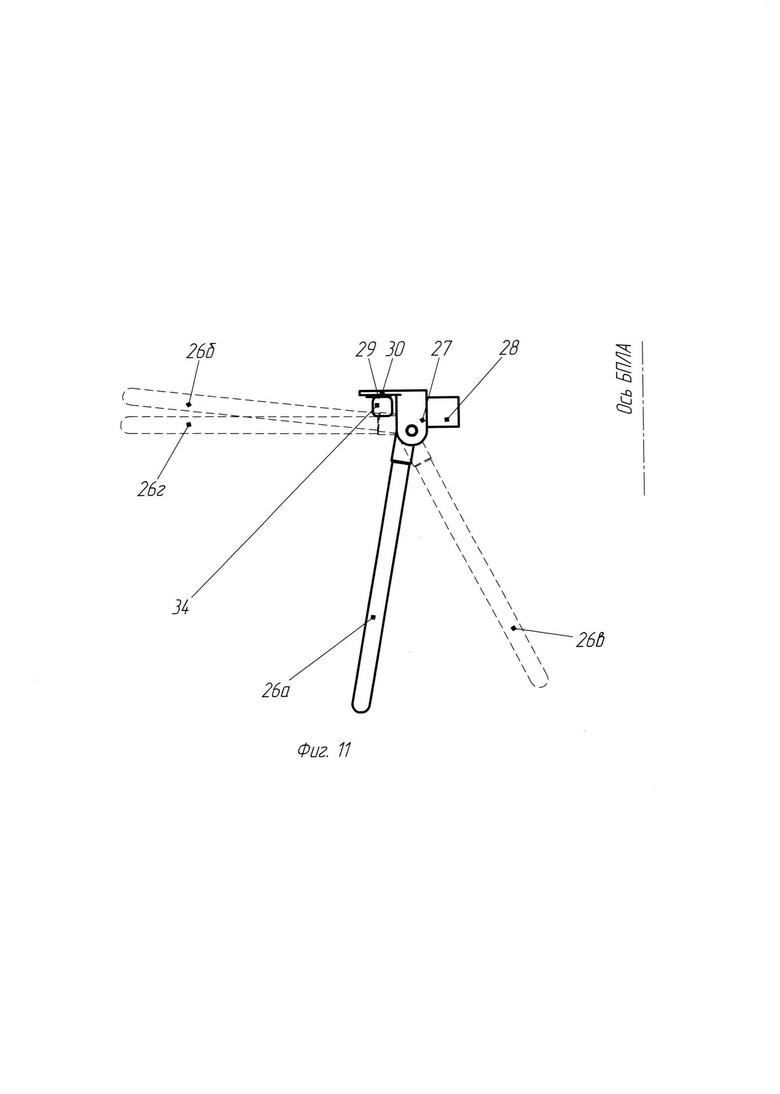
На фиг. 11 изображен поворотный привод шасси и возможные варианты расположения шасси.
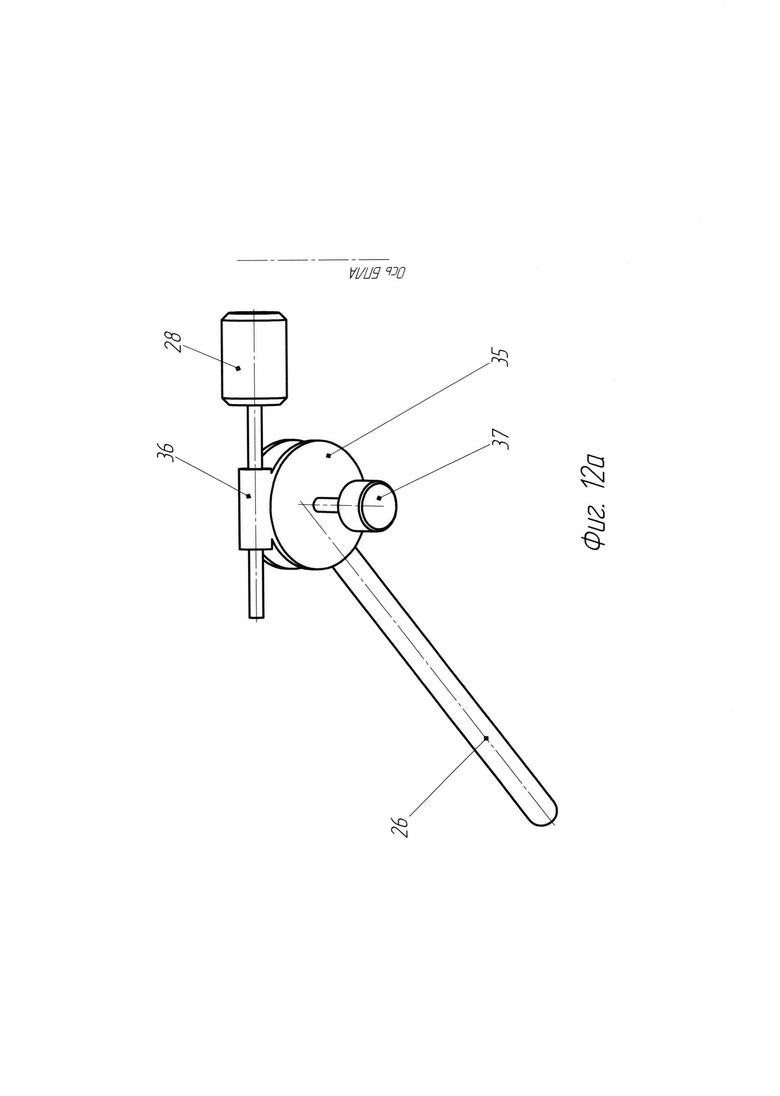
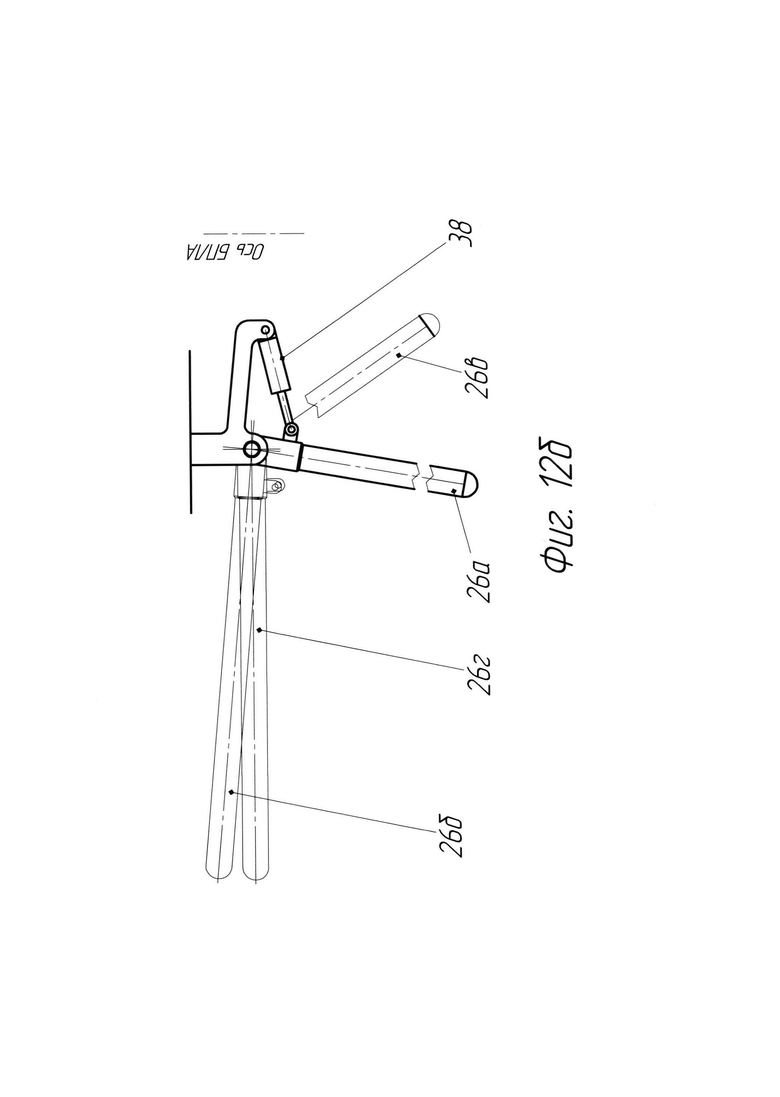
На фиг. 12а, 12б представлены возможные варианты кинематических схем привода шасси.
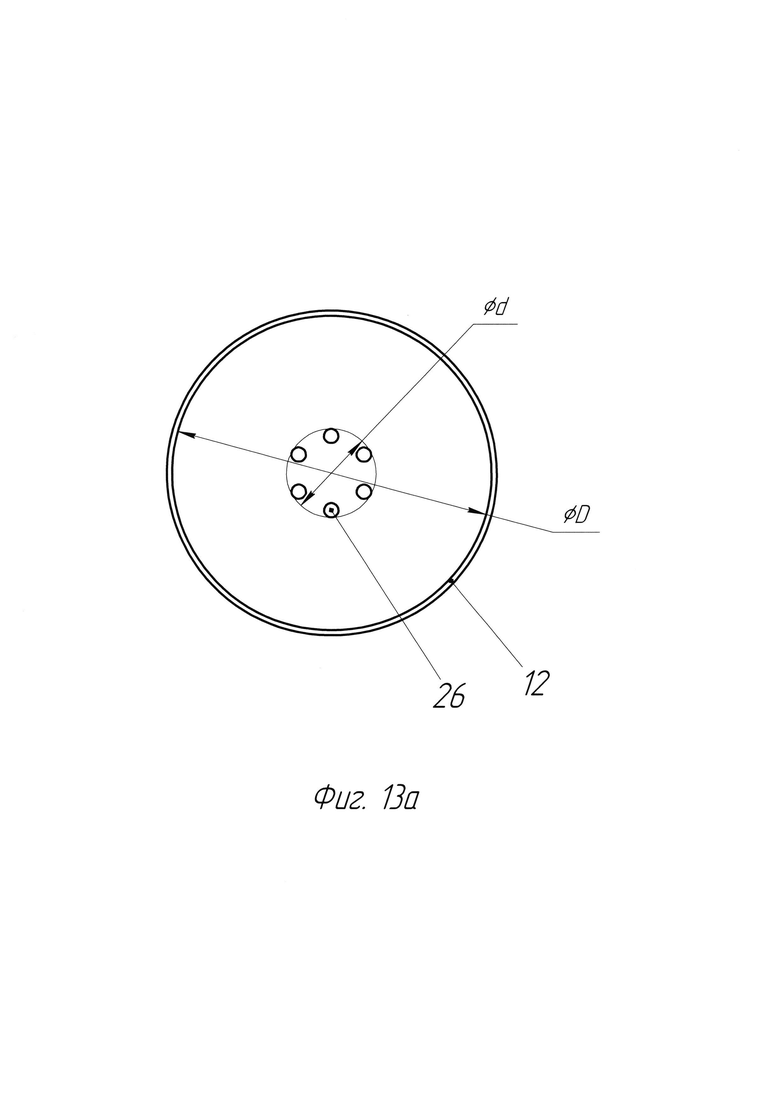
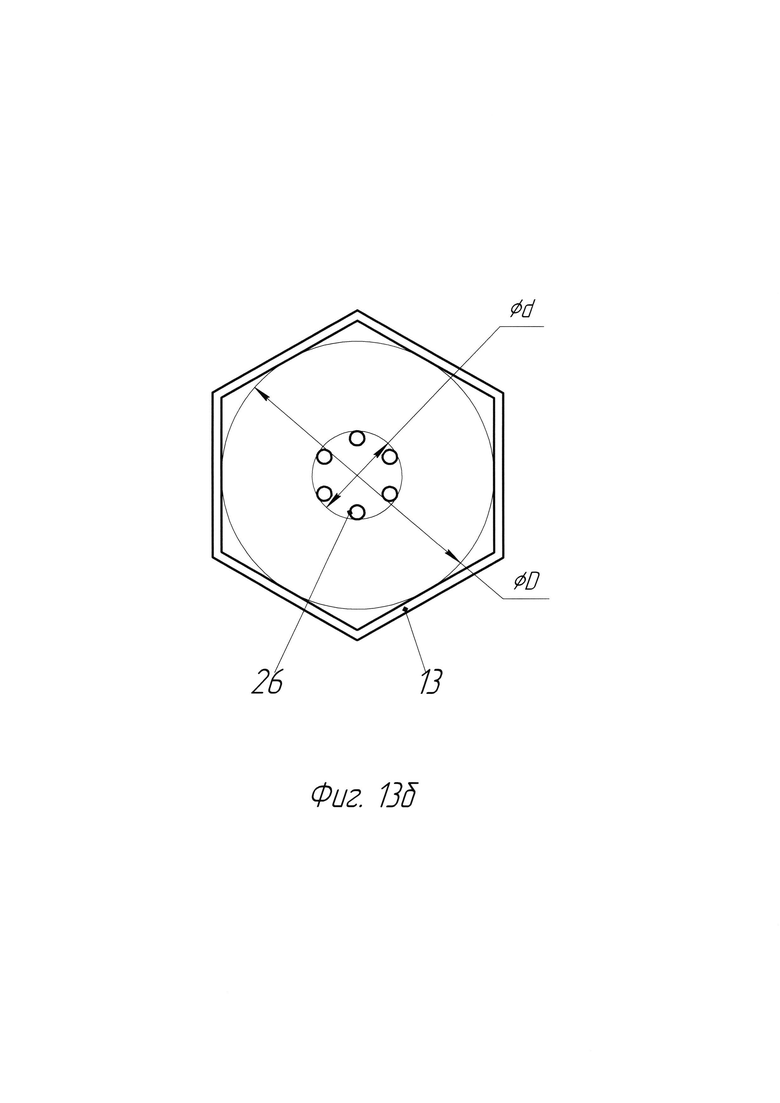
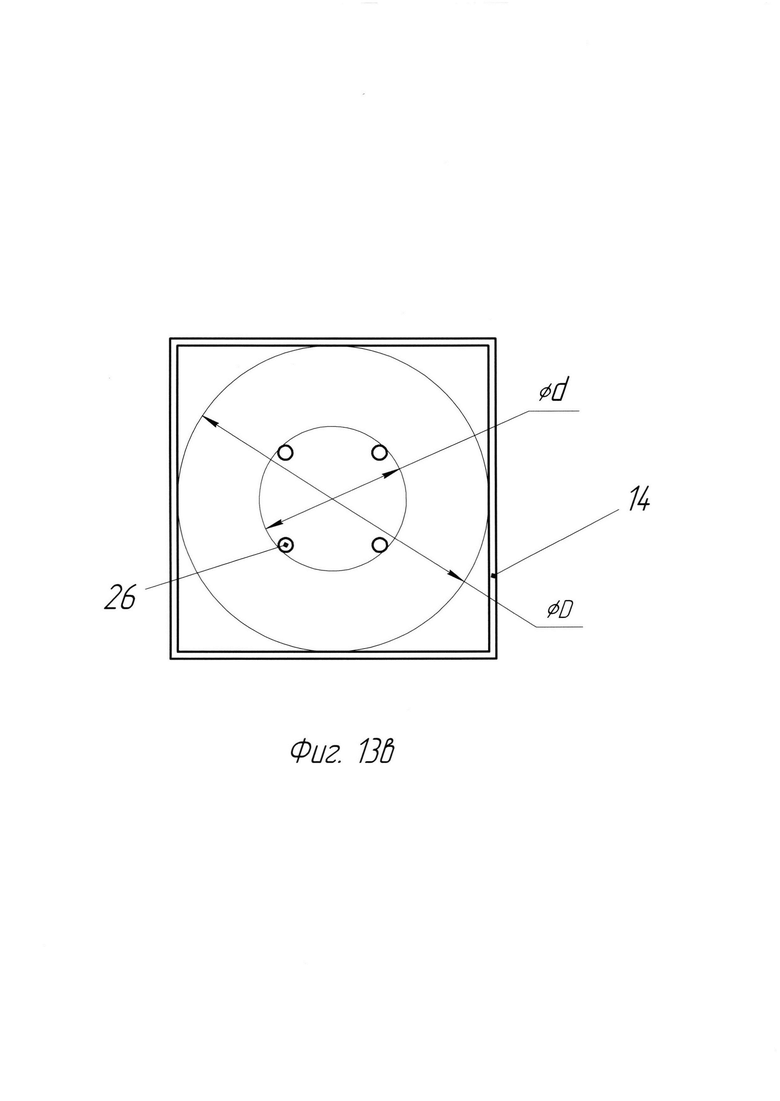
На фиг. 13а, 13б, 13в изображены варианты схем для определения допустимой погрешности посадки для успешного приземления аппарата.
Автоматическая станция зарядки и обслуживания многовинтовых беспилотных летательных аппаратов фиг. 1 содержит корпус 1, откидную дверь 2, посадочную платформу 3, установленную на опоры 4, блок управления 5 и блок питания 6. Откидная дверь 2 установлена на горизонтальные петли 7 и соединена с механизмом открывания 8 дверей, например, в виде линейного актуатора.
На фиг. 2а и 2б изображена автоматическая станция зарядки и обслуживания многовинтовых беспилотных летательных аппаратов с посадочной платформой 3, установленной на держателе 10 в положении хранения аппарата и в положении приема и отправления аппарата. Автоматическая станция содержит корпус 1, распашные двери 2 и 2а с вертикальными петлями 7 и механизмами 8 открывания дверей, блок управления 5, блок питания 6, посадочную платформу 3, установленную на держателе 10, и механизм подъема 11 держателя 10, например, в виде линейного актуатора. Позицией 9 отмечен многовинтовой беспилотный летательный аппарат.
В зависимости от выполняемых задач, автоматическая станция может содержать также механизмы загрузки и выгрузки груза на беспилотный летательный аппарат, механизм замены аккумулятора, и т.д.
Посадочная платформа может быть выполнена в виде кольца 12 (фиг. 3), или многогранника (шестиугольника 13 (фиг. 4)), или квадрата 14 (фиг. 5) или звезды 15 (фиг. 6) и установлена на вертикальные опоры 4 или держатель 10 (фиг. 7) с проушинами 16 и 17 для установки ее на корпус 1 станции и соединения с механизмом подъема 11 соответственно. Поз. 18 обозначен вибратор, который устанавливают на опору 4, или держатель 10, или посадочную платформу 12, или 13, или 14, или 15. Вибратор 18 может представлять собой вибратор электромагнитного типа с подпружиненным якорем или вибратор в виде электродвигателя с несбалансированным ротором. На поверхности посадочной платформы 3 на изоляторах 19 установлены электрические контакты 20 подачи напряжения для зарядки аккумулятора, а также посадочные огни и/или маркеры 21. Посадочная платформа может быть изготовлена из электроизоляционного материала. В этом случае изоляторы 19 могут отсутствовать. Количество вершин многогранника или лучей звезды выбрано равным количеству шасси, используемого беспилотного летательного аппарата 9.
Посадочная платформа 3 может быть изготовлена из профиля типа квадрат, прямоугольник, уголок, швеллер и т.п., а также трубы квадратного или прямоугольного сечения. Выбор сечения ребер платформы зависит от конструкции электрических контактов 20 для подачи напряжения зарядки аккумулятора и посадочных огней (светильников) или маркеров 21.
На фиг. 8а и 8б изображены варианты размещения электрических контактов 20 подачи напряжения для зарядки аккумулятора, посадочных огней и/или маркеров 21 по поверхности (по периметру) посадочной платформы.
Посадочная платформа 3 имеет не менее двух электрических контактов 20 подачи напряжения для зарядки аккумулятора. Наличие большего количества контактов повышает надежность зарядки аккумулятора и снижает нагрузку на контакты. Контакты могут быть расположены как на вершинах многогранника (поз. 20 фиг. 8а), так и на его ребрах (поз. 20а фиг. 8а), на вершинах лучей звезды (поз. 20б фиг. 8а) и у корня лучей (поз. 20в фиг. 8а). Для кольцевой посадочной платформы расположение электрических контактов 20г подачи напряжения для зарядки аккумулятора непринципиально.
Посадочные огни и/или маркеры 21 создают несимметричную картину, обеспечивающую правильную ориентацию садящегося беспилотного летательного аппарата 9 по углу и координате центра посадочной платформы 3. При этом фигура посадочных огней и/или маркеров позволяет определить центр посадочной платформы достаточно простым алгоритмом. Варианты размещения посадочных огней и/или маркеров представлены на фиг. 8б.
Многовинтовой беспилотный летательный аппарат фиг 9а…9г содержит корпус 22, лучи 23, на которых установлены двигатели 24 и воздушные винты 25, шасси 26, поворотные привода шасси 27, работающие от двигателей 28, электрические контакты 29, установленные на упругом основании 30 (фиг. 11) и видеокамеру 31 с системой стабилизации и управления 32, модуль навигатора спутникового позиционирования 33. В корпусе 22 аппарата содержатся также аккумулятор с зарядным устройством, полетный контроллер, регуляторы скорости двигателей воздушных винтов, привода двигателей поворота шасси, необходимые сенсоры и аппаратура, включая ультразвуковое или иное устройство определения расстояния (не показаны).
На фиг. 10а и 10б изображен БПЛА (вид снизу) и посадочные платформы в виде кольца 12 и квадрата 14 и возможные варианты расположения электрических контактов на корпусе 22 БПЛА.
Электрические контакты 29 могут быть расположены на корпусе 22 или лучах 23 аппарата 9 над осями шасси 26 в их полетном положении (поз. 29 на фиг. 10) или на линии контакта со сторонами посадочной платформы в положении посадки, поз. 29а для контакта с посадочной платформы, выполненной в виде кольца 12 или поз. 29б на фиг. 10б для осуществления контакта с квадратной посадочной платформой 3.
Поворотный привод 27 шасси 26 (фиг. 11, 12а, 12б) может быть выполнен в виде червячного редуктора с червяком 36 на валу двигателя 28 и червячным колесом 35, на который установлено шасси 26. На валу червячного колеса 35 установлен датчик углового положения 37, например, энкодер. Возможно также выполнить данный узел в виде рычажной системы с использованием линейного актуатора 38. В этом случае угловое положение шасси 26 может определяться по датчику положения линейного актуатора 38. Поворотный привод шасси 27 по команде бортового контроллера аппарата обеспечивает следующие положения шасси:
В положении «на земле» (плоскости) и в положении захода на посадку на землю (фиг. 9а) шасси аппарата опущены вниз вертикально или несколько разнесены в стороны, поз. 26а на фиг. 11. Данное положение шасси 26 позволяет БПЛА 9 осуществлять взлет/посадку вне автоматической станции зарядки и обслуживания многовинтовых беспилотных летательных аппаратов с горизонтальной поверхности, например, на/с земли или плоской посадочной платформы другого типа, например, с направляющими воронками под каждое шасси.
В положении «в полете» (фиг. 9б) шасси аппарата максимально разнесены в стороны, могут касаться лучей аппарата, поз. 26б на фиг. 11.
В положении «взлета/посадки» (фиг. 9в) шасси 26 аппарата 9 сведены вниз к центру, образуя ребра обращенной вниз усеченной пирамиды, когда концы шасси 26 не касаются друг друга или полной пирамиды, когда концы шасси 26 касаются друг друга, поз. 26в на фиг. 11.
В положении на посадочной платформе 3 автоматической станции зарядки и обслуживания многовинтовых беспилотных летательных аппаратов (фиг. 9г) шасси разнесены в стороны до касания ими нижней поверхности посадочной платформы 3 и поджатая электрических контактов 29 с контактами 20 посадочной платформы 3 и поджатая упругого элемента 30 к профилю посадочной платформы 34 с целью обеспечения надежного контакта, поз. 26г на фиг. 11. Положение шасси 26 задается при этом по показаниям датчика угла поворота 37 или линейного актуатора 38, или по величине момента сопротивления на приводе 27, которая в свою очередь определяется величиной тока питания двигателя 28.
Автоматическая станция зарядки и обслуживания многовинтовых беспилотных летательных аппаратов и работающий совместно с ней многовинтовой беспилотный летательный аппарат работают следующим образом.
В варианте исполнения фиг. 1.
Многовинтовой беспилотный летательный аппарат 9 установлен на посадочную платформу 3, шасси 26 аппарата 9 разведены в стороны до касания ими нижней поверхности посадочной платформы и поджатая электрических контактов 20 и контактов 29 соответственно, находящихся на посадочной платформе 3 и аппарате 9. Откидная дверь 2 автоматической станции закрыта.
В варианте исполнения фиг. 2а
Многовинтовой беспилотный летательный аппарат 9 установлен на посадочную платформу 3, шасси 26 аппарата 9 разведены в стороны до касания ими нижней поверхности посадочной платформы и поджатая электрических контактов 20 и контактов 29 соответственно, находящихся на посадочной платформе 3 и аппарате 9. Держатель 10 с посадочной платформой 3 опущена вниз в вертикальное положение, распашные двери 2 и 2а закрыты.
Геометрия расположения шасси 26 (фиг. 9) и их взаимодействие с геометрией посадочной платформы 3 обеспечивает надежное удержание аппарата 9 в любом положении. Это позволяет разрабатывать автоматическую станцию с различным расположением хранимого многовинтового беспилотного летательного аппарата 9. Фиксированное положение аппарата 9 позволяет проводить над ним необходимые манипуляции в автоматическом режиме, например, замену аккумулятора специальным устройством.
По команде автоматическая станция переводится в положение запуска/приема аппарата.
В варианте исполнения фиг. 1
Откидная дверь 2 опускается вниз до горизонтального положения.
В варианте исполнения фиг. 2б
Распашные двери 2 и 2а открываются настежь, механизм подъема 11 держателя 10 поднимает посадочную платформу 3 в горизонтальное положение.
Многовинтовой беспилотный летательный аппарат 9 переводит шасси 26 в положение взлет/посадка, т.е. сводит их вниз к центру шасси 26, образуя обращенную вниз усеченную или полную пирамиду, запускает двигатели 24 и взлетает вертикально вверх до полного выхода из посадочной платформы 3. Такое взлетное положение обеспечивает беспрепятственный взлет аппарата, т.к. шасси 26 не задевают посадочную платформу 3.
После взлета многовинтовой беспилотный летательный аппарат 9 переводит шасси 26 в «полетное» положение, т.е. разводит шасси 26 максимально в стороны, концы шасси 26 могут касаться лучей 23 аппарата 9. В таком положении шасси 26 не мешают видеокамере 31 делать боковой обзор.
После взлета многовинтового беспилотного летательного аппарата автоматическая станция переходит в режим ожидания.
В варианте исполнения фиг. 1.
Автоматическая станция закрывает откидные двери 2.
В варианте исполнения фиг. 2а.
Автоматическая станция опускает держатель 10 и запирает распашные 2 и 2а двери.
Многовинтовой беспилотный летательный аппарат 9 находит местоположение автоматической станции с помощью модуля спутниковой навигации 33 по заданным координатам. Затем аппарат опускается на высоту, достаточную для получения надежного изображения посадочных огней или маркеров 21 посадочной платформа 3. Автоматическая станция переводится в положение запуска-приема аппарата.
В варианте исполнения фиг. 1.
Откидная дверь 2 опускается вниз до горизонтального положения,
В варианте исполнения фиг. 2а.
Распашные двери 2 и 2а открываются настежь, механизм подъема 11 держателя 10 поднимает посадочную платформу 3 в горизонтальное положение.
Включаются посадочные огни или огни освещения маркеров 21. Камера 31 аппарата переводится в вертикальное положение, включается стабилизация камеры, и она получает изображение посадочных огней или маркеров 21, блок управления аппарата анализирует снимки и корректирует местоположение аппарата относительно посадочной платформы 3 и ориентацию вокруг вертикальной оси. Расстояние от аппарата 9 до посадочной платформы 3 определяется ультразвуковым или иным устройством определения расстояния (не показаны). Аппарат 9 опускается вниз и при подлете к посадочной платформе 3, переводит шасси 26 в положение «взлет/посадка», при котором шасси 26 сведены вниз к центру с образованием обращенной вниз усеченной пирамиды или полной пирамиды, у которой концы шасси 26 касаются друг друга.
На фиг 13 изображены варианты сечений по плоскости посадочной платформы 3 в виде кольца 12, или многогранника 13, или квадрата 14 в момент, когда шасси 26 пересекают эту плоскость. Данная фигура разъясняет значение размеров и показывает свободное пространство между ними, которое позволяет произвести успешно посадку при неточном центрировании аппарата.
Максимальное отклонение аппарата от центра посадочной платформы, при котором возможна удачная посадка определяется формулой
где
X - максимально допустимое отклонение аппарата,
D - внутренний диаметр посадочной платформы,
d - внешний диаметр концов шасси в положении захода на посадку.
Система управления должна обеспечивать требуемую точность посадки.
При дальнейшем снижении БПЛА 9 его шасси 26 входят внутрь посадочной платформы 3 и далее, в случае касания шасси 26 внутренних граней посадочной платформы 3, шасси 26 скользит по внутренней поверхности посадочной платформы 3, обеспечивая тем самым корректировку местоположения садящегося БПЛА 9 относительно посадочной платформы 3. Это обеспечивает точный разворот аппарата 9 и его центрирование таким образом, что после полной посадки электрические контакты 20 и контакты 29 оказываются соединенными. Посадочная платформа 3 в процессе посадки полностью пассивна.
Форма применяемой посадочной платформы 3 оказывает влияние на процесс посадки и ориентацию аппарата 9 при посадке.
Посадочная платформа в виде кольца 12 производит центрирование (позиционирование), но не производит ориентацию приземляемого аппарата по углу относительно сторон посадочной платформы 3. Поэтому угловая точность посадки аппарата полностью определяется точностью системы управления БПЛА 9.
Посадочная платформа в виде многогранника 13, 14 оказывает центрирующее и ориентирующее по углу посадки воздействие. При этом ориентирующее по углу посадки воздействие тем выше, чем меньше угол между ребрами. Посадочная платформа в виде треугольника обладает наилучшим ориентирующим свойством.
Посадочная платформа в виде звезды 15 позволяет уменьшить угол между соседними гранями многогранника и тем самым повысить ориентирующее по углу посадки воздействие. Это позволяет использовать большее число граней без ухудшения ориентирующего воздействия.
Если по какой-либо причине соединение электрических контактов 20 и контактов 29 не устанавливается, производится уточнение. Это возможно двумя способами: аппарат 9 разгоняет воздушные винты 25, приподнимается на несколько сантиметров и садится снова, или включается вибратор 18, который трясет посадочную платформу 3, обеспечивая корректировку местоположения аппарата 9. Затем аппарат 9 переводится в положение «нахождения на посадочной платформе» 3, при котором шасси 26 разнесены в стороны до касания ими нижней поверхности посадочной платформы 3 и поджатая электрических контактов 20, находящихся на посадочной платформе 3, и контактов 29, находящихся на многовинтовом беспилотном летательном аппарате 9.
Далее выключаются посадочные огни или огни освещения маркеров 21.
В варианте исполнения фиг. 1.
Откидная дверь 2 автоматической станции закрывается (вариант фиг. 1).
В варианте исполнения фиг. 2б.
Производится опускание держателя с посадочной платформой 3 в вертикальное положение, и закрываются распашные двери 2 и 2а.
Производится зарядка аккумулятора аппарата 9 или запускаются другие устройства обслуживания аппарата.
При постановке задачи посадить БПЛА 9 вне автоматической станции зарядки и обслуживания многовинтовых беспилотных летательных аппаратов шасси 26 переводят в положение «на земле», и БПЛА 9 осуществляет посадку на горизонтальную поверхность, например, на землю или плоскую посадочную платформу другого типа.
Таким образом, предлагаемые технические решения позволяют упростить процесс зарядки и обслуживания многовинтового беспилотного летательного аппарата в автоматическом режиме, конструкцию автоматической станции зарядки и обслуживания многовинтового беспилотного летательного аппарата и используемого вместе с ним многовинтового беспилотного летательного аппарата, а также обеспечивают возможность взлета и посадки используемого многовинтового беспилотного летательного аппарата вне станции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2024 |
|
RU2830732C1 |
| Автоматическая станция зарядки и обслуживания беспилотных летательных аппаратов | 2023 |
|
RU2821204C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| БАЗОВАЯ СТАНЦИЯ ДЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2723689C1 |
| Станция автоматической замены аккумуляторов для беспилотных летательных аппаратов (БПЛА) | 2019 |
|
RU2723267C1 |
| Многоцелевой беспилотный летательный аппарат | 2021 |
|
RU2763896C1 |
| Станция автоматической замены аккумуляторов для беспилотных летательных аппаратов (БПЛА) и способ ее использования | 2018 |
|
RU2696632C1 |
| Исследование поверхности летательных аппаратов при помощи беспилотного летательного аппарата | 2020 |
|
RU2734363C1 |
| БАЗОВАЯ СТАНЦИЯ ДЛЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2018 |
|
RU2670368C1 |
| УСТРОЙСТВО ПАРКОВКИ И ЗАРЯДКИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (БПЛА) | 2019 |
|
RU2723197C1 |
Изобретение относится к конструкциям станций зарядки и обслуживания беспилотных летательных аппаратов. Автоматическая станция содержит посадочную платформу с посадочными огнями или маркерами, контакты подачи напряжения, блок питания и блок управления. Посадочная платформа выполнена в виде полого многогранника, внутренняя поверхность которого повторяет наружную поверхность, с количеством вершин, равным количеству шасси БПЛА. Посадочная платформа установлена на опорах или держателе, на которые установлен по крайней мере один вибратор. БПЛА содержит корпус, лучи с двигателями и воздушными винтами, аккумулятор, контакты для подачи напряжения и шасси, выполненные подвижными, имеющие положение «на земле», при котором шасси установлены вертикально вниз, «полетное» положение, при котором шасси разнесены максимально в стороны. Шасси имеют положение «взлета/посадки», при котором шасси сведены вниз к центру с образованием обращенной вниз пирамиды или усеченной пирамиды, а также положение, при котором шасси раздвинуты до касания нижней поверхности посадочной платформы и поджатия ими электрических контактов, находящихся на посадочной платформе и на БПЛА. Обеспечивается точное позиционирование БПЛА на посадочной платформе. 5 н. и 5 з.п. ф-лы, 13 ил.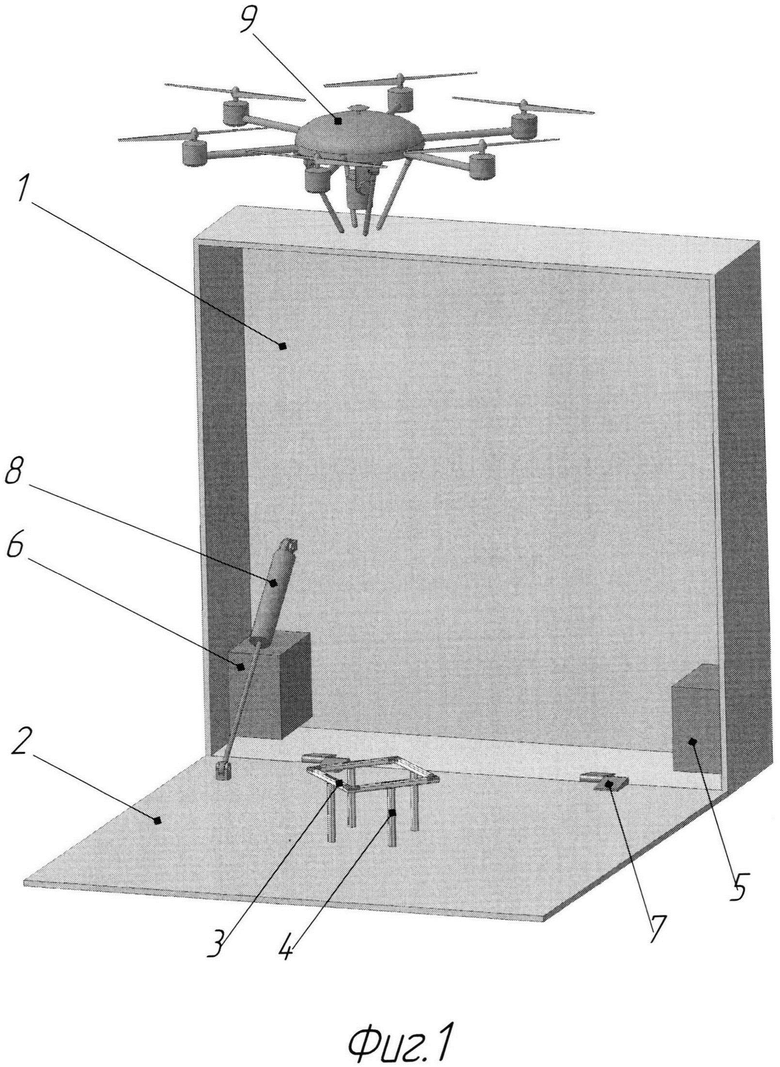
1. Автоматическая станция зарядки и обслуживания многовинтовых беспилотных летательных аппаратов, содержащая посадочную платформу с посадочными огнями и/или маркерами, контакты подачи напряжения для зарядки аккумулятора, блок питания и блок управления, отличающаяся тем, что посадочная платформа выполнена в виде полого многогранника, внутренняя поверхность которого повторяет наружную поверхность, с количеством вершин, равным количеству шасси многовинтового беспилотного летательного аппарата.
2. Автоматическая станция зарядки и обслуживания многовинтовых беспилотных летательных аппаратов, содержащая посадочную платформу, установленную на опорах, контакты подачи напряжения, блок питания и блок управления, отличающаяся тем, что на опорах установлен по крайней мере один вибратор.
3. Автоматическая станция зарядки и обслуживания многовинтовых беспилотных летательных аппаратов, содержащая посадочную платформу, установленную на держателе, контакты подачи напряжения, блок питания и блок управления, отличающаяся тем, что на держателе установлен по крайней мере один вибратор.
4. Автоматическая станция зарядки и обслуживания многовинтовых беспилотных летательных аппаратов по п. 1, или 2, или 3, отличающаяся тем, что контакты для подачи напряжения, посадочные огни или маркеры расположены по поверхности посадочной платформы.
5. Автоматическая станция зарядки и обслуживания многовинтовых беспилотных летательных аппаратов по п. 1, или 2, или 3, отличающаяся тем, что контакты для подачи напряжения установлены на вершинах и/или гранях многогранника.
6. Многовинтовой беспилотный летательный аппарат, содержащий корпус, лучи с двигателями и воздушными винтами, аккумулятор, контакты для подачи напряжения и шасси, выполненные подвижными, имеющие положение «на земле», при котором шасси установлены вертикально вниз, «полетное» положение, при котором шасси разнесены максимально в стороны, отличающийся тем, что шасси дополнительно имеют положение «взлета/посадки», при котором шасси сведены вниз к центру с образованием обращенной вниз пирамиды, а также положение «нахождения на посадочной платформе», при которой шасси раздвинуты до касания нижней поверхности посадочной платформы и поджатия ими электрических контактов, находящихся на посадочной платформе и на БПЛА.
7. Многовинтовой беспилотный летательный аппарат, содержащий корпус, лучи с двигателями и воздушными винтами, аккумулятор, контакты для подачи напряжения и шасси, выполненные подвижными, имеющие положение «на земле», при котором шасси установлены вертикально вниз, «полетное» положение, при котором шасси разнесены максимально в стороны, отличающийся тем, что шасси дополнительно имеют положение «взлета/посадки», при котором шасси сведены вниз к центру с образованием обращенной вниз усеченной пирамиды, а также положение «нахождения на посадочной платформе», при которой шасси раздвинуты до касания нижней поверхности посадочной платформы и поджатия ими электрических контактов, находящихся на посадочной платформе и на БПЛА.
8. Многовинтовой беспилотный летательный аппарат по п. 6 или 7, отличающийся тем, что контакты для подачи напряжения, установленные на упругом основании, расположены на корпусе над осевой линией шасси, при их полетном положении.
9. Многовинтовой беспилотный летательный аппарат по п. 6 или 7, отличающийся тем, что контакты для подачи напряжения, установленные на упругом основании, расположены на лучах над осевой линией шасси, при их полетном положении.
10. Многовинтовой беспилотный летательный аппарат по п. 6 или 7, отличающийся тем, что контакты для подачи зарядного напряжения расположены на корпусе на линии контакта со сторонами посадочной платформы в положении посадки.
| WO 2018039784 A1, 08.03.2018 | |||
| US 20160257424 A1, 08.09.2016 | |||
| US 9440545 B2, 13.09.2016 | |||
| US 20180354649 A1, 13.12.2018 | |||
| US 20160039541 A1, 11.02.2016 | |||
| СПОСОБ ЗАРЯДА АККУМУЛЯТОРНЫХ БАТАРЕЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2593207C1 |

