1. Область техники, к которой относится изобретение
[0001] Изобретение относится к транспортному средству, и, более конкретно, к транспортному средству, содержащему электродвигатель, инвертор, и аккумулятор.
2. Описание предшествующего уровня техники
[0002] В качестве транспортного средства соответствующего типа, предложено транспортное средство, которое содержит электрический двигатель и устройство преобразования электроэнергии, имеющее инверторную схему, которая приводит в действие электрический двигатель путем переключения множества переключающих элементов, и в которой импульсные сигналы множества переключающих элементов генерируются на основе числа импульсов в одном электрическом периоде электрического двигателя и коэффициента модуляции напряжения, а также напряжения фазы на основе команды управления крутящим моментом электрического двигателя для переключения множества переключающих элементов (например, см. публикацию японской патентной заявки No. 2013-162660 (JP 2013-162660 А). В таком транспортном средстве, уменьшение потерь в системе привода, включающей в себя устройство преобразования электроэнергии и электрический двигатель в целом, достигается путем генерирования импульсных сигналов с целью минимизации потерь электроэнергии на устройстве преобразования электроэнергии и электрическом двигателе на основе числа импульсов, коэффициента модуляции, и напряжения фазы (первый способ).
[0003] В качестве транспортного средства соответствующего типа, было предложено транспортное средство, которое содержит электродвигатель и инвертор, приводящий в действие электродвигатель путем переключения множества переключающих элементов, и в котором ШИМ-сигналы множества переключающих элементов генерируются путем сравнения команд управления напряжением фаз на основе команды управления крутящим моментом электродвигателя с напряжением несущей частоты для переключения множества переключающих элементов (например, см. публикацию японской патентной заявки No. 2014-75937 (JP 2014-75937 А)) (второй способ).
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Однако, согласно первому способу, в целом больше период, в котором генерируются импульсные сигналы (сигналы широтно-импульсной модуляции, далее, ШИМ-сигналы), и динамические свойства (привязка к рабочей точке, когда меняется целевая рабочая точка) электрического двигателя (электродвигателя) ниже по сравнению со вторым способом. В зависимости от целевой рабочей точки электрического двигателя потери могут не меняться ни при первом способе, ни при втором способе. Соответственно, использование первого способа не может считаться подходящим. С учетом потерь и пр., использование второго способа нельзя назвать подходящим.
[0005] Изобретением предложено транспортное средство, которое более подходящим способом приводит в действие электрический двигатель (электродвигатель).
[0006] Транспортное средство согласно первому объекту изобретения содержит электродвигатель, выполненный с возможностью приведения в движение транспортного средства, инвертор, выполненный с возможностью приведения в действие электродвигателя путем переключения множества переключающих элементов, аккумулятор, выполненный с возможностью обмена электроэнергией с электродвигателем через инвертор, и электронный блок управления, выполненный с возможностью управления инвертором на основе команды управления крутящим моментом электродвигателя. Электронный блок управления выполнен с возможностью выполнения первого регулирования посредством широтно-импульсной модуляции (далее, ШИМ регулирования) для генерирования первого ШИМ-сигнала для множества переключающих элементов, чтобы переключать множество переключающих элементов, путем сравнения команд управления напряжением фаз на основе команды управления крутящим моментом с напряжением несущей частоты, когда целевая рабочая точка, включающая в себя скорость вращения и команду управления крутящим моментом электродвигателя, находится вне заранее заданной области, а также выбора и выполнения второго ШИМ регулирования для генерирования второго ШИМ-сигнала для множества переключающих элементов, чтобы переключать множество переключающих элементов, на основе коэффициента модуляции напряжения, а также напряжения фазы на основе команды управления крутящим моментом и числа импульсов в заранее заданный период электрического угла электродвигателя, или первого ШИМ регулирования, когда целевая рабочая точка находится внутри заранее заданной области.
[0007] Когда выполняется первое ШИМ регулирование, динамические свойства (привязка к рабочей точке, когда меняется целевая рабочая точка) электродвигателя могут повыситься по сравнению с выполнением второго ШИМ регулирования. Когда выполняется второе ШИМ регулирование, потери в сердечнике электродвигателя или гармоники могут быть уменьшены по сравнению с выполнением первого ШИМ регулирования, путем генерирования второго ШИМ-сигнала, чтобы уменьшить (например, минимизировать) потери в сердечнике электродвигателя, или генерирования второго ШИМ-сигнала для уменьшения (например, минимизации) гармоник напряжения или тока (в частности, низкочастотных гармоник, таких как вращательные шестые гармоники и вращательные двенадцатые гармоники электродвигателя). Соответственно, согласно вышеупомянутому объекту, когда заранее заданная область определяется, как область, в которой эффект от выполнения второго ШИМ регулирования можно ожидать в определенной степени, можно более подходящим образом управлять электродвигателем в зависимости от целевой рабочей точки.
[0008] Согласно объекту изобретения, электронный блок управления может быть выполнен с возможностью генерирования первого ШИМ-сигнала в первый интервал, соответствующий половине периода напряжения несущей частоты, или периоду напряжения несущей частоты при выполнении первого ШИМ регулирования, и генерирования второго ШИМ-сигнала во второй интервал, более длинный, чем первый интервал, при выполнении второго ШИМ регулирования.
[0009] Согласно объекту изобретения, электронный блок управления может быть выполнен с возможностью установки угла переключения на основе коэффициента модуляции, числа импульсов, и напряжения фазы, установки режима переключения на основе числа импульсов, и генерирования второго ШИМ-сигнала на основе угла переключения и режима переключения при генерировании второго ШИМ-сигнала. При этом, «угол переключения» относится к углу для переключения фазного напряжения каждой фазы электродвигателя (ВКЛ и ВЫКЛ переключающего элемента соответствующей фазы среди множества переключающих элементов). «Режим переключения» относится к сочетанию ВКЛ и ВЫКЛ множества переключающих элементов. В этом случае, опорный угол переключения может быть установлен на основе коэффициента модуляции и числа импульсов, а также угол переключения может быть установлен на основе опорного угла переключения и напряжения фазы.
[0010] Согласно объекту изобретения, электронный блок управления может быть выполнен с возможностью осуществления первого ШИМ регулирования, когда целевая рабочая точка находится внутри заранее заданной области, и коэффициент модуляции меньше, чем заданный коэффициент модуляции. Автором изобретения обнаружено, что эффект выполнения второго ШИМ регулирования относительно невелик, когда целевая рабочая точка находится внутри заранее заданной области, и коэффициент модуляции относительно невелик. Соответственно, можно более подходящим образом управлять электродвигателем, выполняя первое ШИМ регулирование, чтобы повысить динамические свойства электродвигателя.
[0011] Согласно объекту изобретения, электронный блок управления
может быть выполнен с возможностью установки числа импульсов на основе целевой рабочей точки и коэффициента модуляции, когда целевая рабочая точка находится внутри заранее заданной области. Соответственно, число импульсов может быть установлено более подходящим, и второй ШИМ-сигнал может быть генерирован более приемлемым образом, таким образом, удовлетворительно приводя в действие электродвигатель.
[0012] Согласно объекту изобретения, электронный блок управления может быть выполнен с возможностью установки числа импульсов на основе целевой рабочей точки и коэффициента модуляции, установки одной из множества характеристик, включая характеристику генерирования второго ШИМ-сигнала для снижения потерь в сердечнике электродвигателя, а также характеристику генерирования второго ШИМ-сигнала для уменьшения гармоник в качестве выбранной характеристики, и генерирования второго ШИМ-сигнала на основе коэффициента модуляции, напряжения фазы, числа импульсов, а также выбранной характеристики, когда целевая рабочая точка находится внутри заранее заданной области. Соответственно, число импульсов и характеристика могут быть установлены более подходящими, и второй ШИМ-сигнал может быть генерирован более приемлемым образом, тем самым, удовлетворительно приводя в действие электродвигатель.
[0013] Согласно объекту изобретения, электронный блок управления может быть выполнен с возможностью установки числа импульсов, меньшего в области, в которой коэффициент модуляции относительно велик, чем в области, в которой коэффициент модуляции относительно невелик.
[0014] Согласно объекту изобретения, электронный блок управления может быть выполнен с возможностью осуществления первого ШИМ регулирования, даже когда целевая рабочая точка находится внутри заранее заданной области, состояние системы привода, включающей в себя электродвигатель, инвертор, и аккумулятор, внезапно изменяется, либо прогнозируется внезапное изменение в системе привода. Когда выполняется второе ШИМ регулирование, динамические свойства электродвигателя ниже, чем таковые при выполнении первого ШИМ регулирования. Соответственно, когда состояние системы привода внезапно изменяется, или когда прогнозируется внезапное изменение состояния системы привода, можно более удовлетворительным образом приводить в действие электродвигатель путем выполнения первого ШИМ регулирования с целью повышения динамических свойств электродвигателя, даже когда целевая рабочая точка находится внутри заранее заданной области.
[0015] Согласно объекту изобретения, электронный блок управления может быть выполнен с возможностью определения того, что состояние системы привода внезапно изменилось, и выполнения первого ШИМ регулирования, когда изменение в единицу времени, по меньшей мере, одного из следующего: команды управления крутящим моментом, скорости вращения, напряжения инвертора и напряжения аккумулятора больше, чем пороговое значение. Соответственно, можно определить, действительно ли состояние системы привода внезапно изменилось на основе команды управления крутящим моментом, скорости вращения, напряжения инвертора, или напряжения аккумулятора.
[0016] Согласно объекту изобретения, электронный блок управления может быть выполнен с возможностью определения того, что прогнозируется внезапное изменение состояния системы привода, или выполнения первого ШИМ регулирования, когда проезжая дорога представляет собой дорогу с низким уровнем μ. Соответственно, можно определить, действительно ли внезапное изменение состояния системы привода прогнозируется на основе условий проезжей дороги. При этом, «дорога с низким уровнем μ» относится к проезжей дороге, на которой транспортное средство может скользить из-за прокручивания ведущих колес, например, на мокром дорожном покрытии, снежной дороге или замерзшей дороге.
[0017] Электронный блок управления может быть выполнен с возможностью установки числа импульсов на основе целевой рабочей точки или коэффициента модуляции, установки одной из множества характеристик, включая характеристику генерирования второго ШИМ-сигнала для снижения потерь в сердечнике электродвигателя, характеристику генерирования второго ШИМ-сигнала для снижения омических потерь электродвигателя, характеристику генерирования второго ШИМ-сигнала для снижения пульсаций крутящего момента электродвигателя, характеристику генерирования второго ШИМ-сигнала для снижения потерь инвертора, характеристику генерирования второго ШИМ-сигнала для снижения общих потерь электродвигателя или инвертора, характеристику генерирования второго ШИМ-сигнала для уменьшения гармоник напряжения, а также характеристику генерирования второго ШИМ-сигнала для уменьшения гармоник тока в качестве выбранной характеристики, и для генерирования второго ШИМ-сигнала на основе коэффициента модуляции, напряжения фазы, числа импульсов, и выбранной характеристики, когда целевая рабочая точка находится внутри заранее заданной области.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0018] Признаки, преимущества, техническое или промышленное назначение примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на прилагаемые чертежи, на которых одинаковые цифры обозначают одинаковые элементы, и на которых:
Фиг. 1 представляет собой структурную схему, схематически иллюстрирующую конфигурацию электрического транспортного средства согласно варианту осуществления изобретения;
Фиг. 2 представляет собой блок-схему, иллюстрирующую пример процедуры установки выполняемого регулирования, которая выполняется электронным блоком управления согласно варианту осуществления;
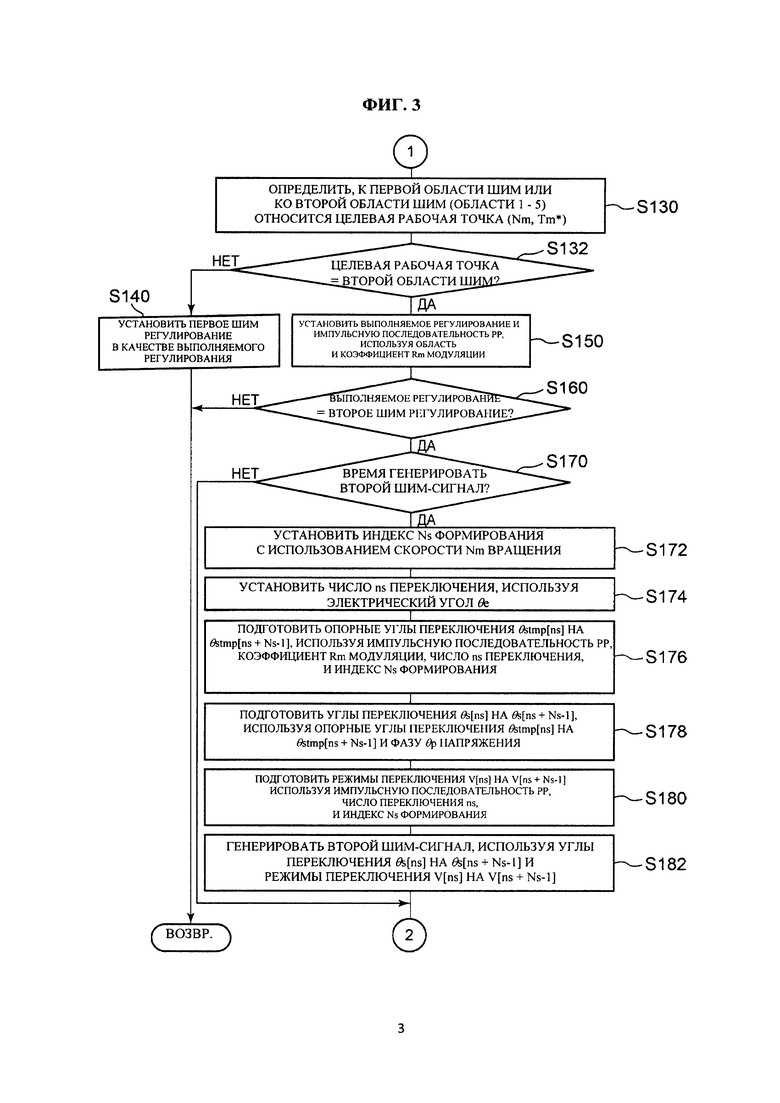
Фиг. 3 представляет собой блок-схему, иллюстрирующую пример процедуры установки выполняемого регулирования, которая выполняется электронным блоком управления согласно варианту осуществления;
Фиг. 4 представляет собой блок-схему, иллюстрирующую пример процедуры установки выполняемого регулирования, которая выполняется электронным блоком управления согласно варианту осуществления;
Фиг. 5 представляет собой график, иллюстрирующий пример зависимости между целевой рабочей точкой электродвигателя и областями первого и второго ШИМ регулирования;
Фиг. 6 представляет собой схему, иллюстрирующую пример зависимости между областями 1-5, коэффициентом Rm модуляции, выполняемым регулированием, и импульсной последовательностью РР;
Фиг. 7 представляет собой схему, иллюстрирующую пример зависимости между импульсной последовательностью РР, коэффициентом Rm модуляции, и опорными углами 0stmp переключения чисел 1-N переключения;
Фиг. 8 представляет собой схему, иллюстрирующую пример зависимости между импульсной последовательностью РР и режимами V переключения чисел 1-N переключения;
Фиг. 9 представляет собой диаграмму, иллюстрирующую пример зависимости между числами 5-8 переключения, углами θs[5]-θs[8] переключения, режимами V[5]-V[8] переключения, и вторыми ШИМ-сигналами транзисторов T11-Т13, когда число ns переключения имеет значение 5, а индекс формирования Ns имеет значение 4; и
Фиг. 10 представляет собой структурную схему, схематически иллюстрирующую конфигурацию гибридного транспортного средства согласно модифицированному примеру.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0019] Ниже будет описан вариант осуществления изобретения со ссылкой на пример.
[0020] Фиг. 1 представляет собой структурную схему, схематически иллюстрирующую конфигурацию электрического транспортного средства 20 согласно варианту осуществления изобретения. Электрическое транспортное средство 20 согласно варианту осуществления содержит электродвигатель 32, инвертор 34, аккумулятор 36, повышающий преобразователь 40, и электронный блок 50 управления, как показано на чертеже.
[0021] Электродвигатель 32 выполнен как синхронный генератор-электродвигатель и включает в себя ротор, в который встроен постоянный магнит, и статор, на который намотана трехфазная катушка. Ротор электродвигателя 32 соединен с ведущим валом 26, который соединен с ведущими колесами 22а и 22b через дифференциальную шестерню 24.
[0022] Инвертор 34 соединен с электродвигателем 32 и также соединен с повышающим преобразователем 40 через линию 42 электропитания высокого напряжения. Инвертор 34 содержит шесть транзисторов Т11-Т16 и шесть диодов D11-D16. Транзисторы Т11-Т16 размещены в виде пар двух транзисторов, которые служат в качестве стороны истока и стороны стока относительно положительной шины или отрицательной шины линии 42 электропитания высокого напряжения. Шесть диодов D11-D16 подключены встречно-параллельно транзисторам T11-Т16 соответственно. Трехфазная катушка (U-фаза, V-фаза или W-фаза) электродвигателя 32 присоединена к точкам соединения между транзисторами, составляющими пары транзисторов Т11-Т16. Соответственно, когда напряжение подается на инвертор 34, вращающееся магнитное поле формируется в трехфазной катушке, и электродвигатель 32, приводится во вращение, заставляя электронный блок 50 управления корректировать соотношение времени ВКЛ для каждой пары транзисторов T11-Т16. В дальнейшем транзисторы Т11-Т13 могут именоваться «верхним плечом», а транзисторы Т14-Т16 могут именоваться «нижним плечом». Сглаживающий конденсатор 46 присоединен к положительной шине и отрицательной шине линии 42 электропитания высокого напряжения.
[0023] Аккумулятор 36 представляет собой, например, литиево-ионный дополнительный аккумулятор или никель-водородный дополнительный аккумулятор и соединен с повышающим преобразователем 40 через линию 44 электропитания низкого напряжения. Сглаживающий конденсатор 48 соединен с положительной шиной и отрицательной шиной линии 44 электропитания низкого напряжения.
[0024] Повышающий преобразователь 40 соединен с линией 42 электропитания высокого напряжения и линией 44 электропитания низкого напряжения. Повышающий преобразователь 40 содержит два транзистора Т31 и Т32, два диода D31 и D32, и стабилизатор L. Транзистор Т31 соединен с положительной шиной линии 42 электропитания высокого напряжения. Транзистор Т32 соединен с транзистором Т31 и отрицательными шинами линии 42 электропитания высокого напряжения и линии 44 электропитания низкого напряжения. Два диода D31 или D32 присоединены встречно-параллельно транзисторам Т31 и Т32, соответственно. Стабилизатор L присоединен в точке соединения между транзистором Т31 и Т32 и положительной шиной линии 44 электропитания низкого напряжения. Заставляя электронный блок 50 управления корректировать соотношение времени ВКЛ транзисторов Т31 и Т32, повышающий преобразователь 40 подает электропитание от линии 44 электропитания низкого напряжения в линию 42 электропитания высокого напряжения с повышением напряжения, или подает электропитание от линии 42 электропитания высокого напряжения в линию 44 электропитания низкого напряжения с понижением напряжения.
[0025] Электронный блок 50 управления представляет собой микропроцессор, содержащий центральный процессор (ЦП) 52, и содержащий ПЗУ 54, хранящее программу обработки, ОЗУ 56, временно сохраняющее данные, и входной или выходной порт в дополнение к ЦП 52.
[0026] Сигналы от различных датчиков поступают в электронный блок 50 управления через входной порт. Примеры сигналов, поступающих в электронный блок 50 управления, включают в себя угловое положение θm от датчика 32а углового положения (например, круговой датчик положения), который определяет угловое положение ротора электродвигателя 32 и фазные токи Iu и Iv от датчиков 32u и 32v тока, которые определяют токи, протекающие в фазах электродвигателя 32. Примеры входных сигналов дополнительно включают в себя напряжение VB от датчика 36а напряжения, подключенного между клеммами аккумулятора 36, и тока IB от датчика 36b тока, подключенного к выходной клемме аккумулятора 36. Примеры входных сигналов дополнительно включают в себя напряжение VH конденсатора 46 (линии 42 электропитания высокого напряжения) от датчика 46а напряжения, подключенного между клеммами конденсатора 46, и напряжение VL конденсатора 48 (линии 44 электропитания низкого напряжения) от датчика 48а напряжения, подключенного между клеммами конденсатора 48. Примеры входных сигналов дополнительно включают в себя сигнал зажигания от ключа 60 зажигания, положение SP переключения от датчика 62 положения переключения передач, который определяет рабочее положение рычага 61 переключения, степень Асc открытия акселератора от датчика 64 положения педали акселератора, который определяет степень воздействия на педаль 63 акселератора и положение BP педали тормоза от датчика 66 положения педали тормоза, который определяет степень воздействия на педаль тормоза. Примеры входных сигналов дополнительно включают в себя скорость VS транспортного средства от датчика 68 скорости транспортного средства или сигнал дороги низкого уровня «μ» от переключателя 69 для дорог с низким уровнем «μ», который сигнализирует о движении по дороге с низким уровнем «μ». При этом дорога с низким уровнем «μ.» относится к проезжей дороге, на которой транспортное средство может скользить из-за проскальзывания ведущих колес 22а и 22b, например, на мокрой дорожной поверхности, снежной дороге или промерзшей дороге.
[0027] Различные управляющие сигналы подают из электронного блока 50 управления через выходной порт. Примеры выходного сигнала электронного блока 50 управления включают в себя сигналы управления переключением, поступающие на транзисторы T11-Т16 инвертора 34 и сигналы управления переключением, поступающие на транзисторы Т31 и Т32 повышающего преобразователя 40.
[0028] Электронный блок 50 управления вычисляет электрический угол θе, угловую скорость ωm, и скорость Nm вращения электродвигателя 32 на основе углового положения θm ротора электродвигателя 32 от датчика 32а углового положения. Электронный блок 50 управления вычисляет состояние заряда (СЗ) аккумулятора 36 на основе совокупного значения тока IB аккумулятора 36 от датчика 36b тока. При этом СЗ представляет собой отношение энергоемкости, которую можно получить при разрядке из аккумулятора 36, к общей энергоемкости аккумулятора 36.
[0029] В электрическом транспортном средстве 20 согласно варианту осуществления, имеющем вышеупомянутую конфигурацию, электронный блок 50 управления выполняет следующее управление движением. При управлении движением требуемый крутящий момент Td*, необходимый для приводного вала 26, устанавливается на основе степени Асc открытия акселератора и скорости VS транспортного средства, заданный крутящий момент Td* задается как команда Тm* управления крутящим моментом электродвигателя 32, и управление переключением транзисторов T11-Т16 инвертора 34 выполняется для привода электродвигателя 32 в соответствии с командой Тm* управления крутящим моментом. Целевое напряжение VH* линии 42 электропитания высокого напряжения устанавливается для приведения в действие электродвигателя 32 в соответствии с командой Тm* управления крутящим моментом, а управление переключением транзисторов Т31 или Т32 повышающего преобразователя 40 выполняется таким образом, что напряжение VH линии 42 электропитания высокого напряжения достигает целевого напряжения VH*.
[0030] Ниже будет описано управление инвертором 34. В варианте осуществления в качестве управления инвертором 34, выполняется одно из следующего: либо регулирование посредством синусоидальной широтно-импульсной модуляции (ШИМ регулирование), либо ШИМ регулирование с перемодуляцией, либо регулирование прямоугольно-импульсного напряжения. Регулирование посредством синусоидальной ШИМ является регулированием для управления инвертором 34 путем подачи псевдо трехфазного напряжения переменного тока на электродвигатель 32, регулирование посредством ШИМ с перемодуляцией является регулирование для управления инвертором 34 путем подачи напряжения перемодуляции на электродвигатель 32, а регулирование прямоугольно-импульсным напряжением является регулированием управления инвертором 34 путем подачи прямоугольно-импульсного напряжения на электродвигатель 32. Когда выполняется регулирование посредством синусоидальной ШИМ, и напряжение с широтно-импульсной модуляцией на основе напряжения в виде синусоиды используется в качестве псевдотрехфазного напряжения переменного тока, коэффициент Rm модуляции имеет значение, составляющее от 0 до приблизительно 0,61. Когда напряжение с широтно-импульсной модуляцией на основе наложенного напряжения, полученного путем наложения 3n-их (например, третьей) гармоник напряжения на напряжение в виде синусоиды используется в качестве псевдо-трехфазного напряжения переменного тока, коэффициент Rm модуляции имеет значение, составляющее от 0 до приблизительно 0,71. Коэффициент Rm модуляции представляет собой отношение действительного значения выходного напряжения инвертора 34 (напряжения, подаваемого на электродвигатель 32) к входному напряжению (напряжению VH линии 42 электропитания высокого напряжения). В варианте осуществления, чтобы увеличить диапазон коэффициента Rm модуляции, в котором может выполняться регулирование посредством синусоидальной ШИМ, подразумевается, что напряжение широтно-импульсной модуляции на основе наложенного напряжения используется как псевдотрехфазное напряжение переменного тока. Когда выполняется регулирование прямоугольно-импульсным напряжением, коэффициент Rm модуляции имеет значение около 0,78. В варианте осуществления, в соответствии с его описанием, подразумевается, что любое регулирование посредством синусоидальной ШИМ, ШИМ регулирование с перемодуляцией, а также регулирование прямоугольно-импульсным напряжением выполняется на основе коэффициента Rm модуляции. Регулирование посредством синусоидальной ШИМ будет описано ниже.
[0031] В варианте осуществления первое ШИМ регулирование или второе ШИМ регулирование выполняется, как регулирование посредством синусоидальной ШИМ. Первое ШИМ регулирование представляет собой регулирование с генерированием первого ШИМ-сигнала транзисторов T11-Т16 для переключения транзисторов T11-Т16 путем сравнения команд Vu*, Vv*, и Vw* напряжения фаз электродвигателя 32 с напряжением несущей частоты (напряжением с треугольной волной). Второе ШИМ регулирование представляет собой регулирование с генерированием второго ШИМ-сигнала транзисторов Т11-Т16 на основе коэффициента Rm модуляции напряжения, напряжения фазы θр, и числа импульсов Np в заданный период (например, половину периода или один период электрического угла θе электродвигателя 32) для переключения транзисторов T11-Т16. Подразумевается, что первый ШИМ-сигнал генерируется в интервале Δt1, соответствующем половине периода или одному периоду напряжения несущей частоты (напряжения с треугольной волной с частотой 3 кГц - 5 кГц), когда выполняется первое ШИМ регулирование, и второй ШИМ-сигнал генерируется в интервале Δt2, более длинном, чем интервал Δt1, когда выполняется второе ШИМ регулирование.
[0032] Когда выполняется первое ШИМ регулирование, период генерирования ШИМ-сигнала может быть установлен более коротким, чем когда выполняется второе ШИМ регулирование, и при этом динамические свойства (привязка к рабочей точке при изменении целевой рабочей точки) электродвигателя 32 могут повыситься. Когда выполняется второе ШИМ регулирование, можно уменьшить (например, свести к минимуму) потери в сердечнике электродвигателя 32 или уменьшить гармоники путем генерирования второго ШИМ-сигнала, чтобы уменьшить (например, свести к минимуму) гармоники напряжения или тока (в частности, гармоники низшего порядка, такие как вращательная шестая гармоника или вращательная двенадцатая гармоника электродвигателя 32), по сравнению со случаем, в котором выполняется первое ШИМ регулирование.
[0033] В варианте осуществления подразумевается, что ШИМ регулирование с перемодуляцией выполняется таким же образом, как первое ШИМ регулирование. ШИМ регулирование с перемодуляцией или регулирование прямоугольно-импульсным напряжением не является существенным для изобретения или, следовательно, детальное его описание будет опущено.
[0034] Ниже будет описана работа электрического транспортного средства 20 согласно варианту осуществления, имеющего вышеупомянутую конфигурацию, в частности, работа, когда первое ШИМ регулирование или второе ШИМ регулирование задается в качестве выполняемого регулирования при выполнении регулирования посредством синусоидальной ШИМ. Фиг. 2-4 являются блок-схемами, иллюстрирующими примеры процедуры установления выполняемого регулирования, которая выполняется электронным блоком 50 управления согласно варианту осуществления. Эти процедуры периодически выполняются в интервалах, которые равны или короче вышеуказанного интервала Δt1 (периода генерирования первого ШИМ-сигнала).
[0035] При выполнении процедуры установления выполняемого регулирования, центральный процессор 52 электронного блока 50 управления сначала принимает такие данные, как фазные токи Iu и Iv, электрический угол θе, скорость Nm вращения, и команда Тm* управления крутящим моментом электродвигателя 32, напряжение VH линии 42 электропитания высокого напряжения, напряжение VB аккумулятора 36, а также сигнал переключения на дорогу с низким уровнем μ (этап S100). При этом подразумевается, что значения, определенные датчиками тока 32u и 32v, вводятся как фазные токи Iu и Iv электродвигателя 32. Подразумевается, что значения, вычисленные на основе углового положения θm ротора электродвигателя 32, определенного датчиком 32а углового положения, вводятся как электрический угол θe или скорость Nm вращения электродвигателя 32. Также подразумевается, что значение, установленное вышеупомянутым управлением приводом, вводится как команда Тm* управления крутящим моментом электродвигателя 32. Подразумевается, что значение, определяемое датчиком 46а напряжения, вводится как напряжение VH линии 42 электропитания высокого напряжения. Подразумевается, что значение, определяемое датчиком 36а напряжения, вводится как напряжение VB аккумулятора 36. Подразумевается, что сигнал (ВКЛ-ВЫКЛ) от переключателя 69 на дорогу с низким уровнем μ, вводится как сигнал переключения на дорогу с низким уровнем μ.
[0036] Когда данные вводятся таким образом, текущие команды Id * и Iq* оси d и оси q устанавливаются на основе команды Тm* управления крутящим моментом электродвигателя 32 (этап S110). Впоследствии, исходя из предположения, что совокупный ток, текущий по фазам (U-фазе, V-фазе или W-фазе) электродвигателя 32, равен 0, фазные токи Iu и Iv U-фазы и V-фазы преобразуются по координатам в токи Id и Iq оси d и оси q (преобразование трех фаз в две фазы) с использованием электрического угла θе электродвигателя 32 (этап S112). При этом, команды Vd* и Vq* напряжения по оси d и оси q устанавливаются на основе суммарной обратной связи на основе разностей ΔId или ΔIq между командами Id* и Iq* тока по оси d и оси q и токами Id и Iq по оси d и оси q, и параметром для непосредственной обратной связи для уменьшения параметра, обозначающего интерференцию между осью d и осью q (этап S114).
[0037] Когда команды Vd* и Vq* напряжения по оси d и оси q устанавливаются таким образом, коэффициент Rm модуляции напряжения или напряжение фазы θр устанавливаются с использованием установленных команд Vd* или Vq* напряжения по оси d и оси q (этап S116). При этом, коэффициент Rm модуляции может быть получен путем деления абсолютной величины Vdq команды сопротивления, вычисленной как квадратный корень из суммы квадрата команды Vd* напряжения по оси d и квадрата команды Vq* напряжения по оси q на напряжение VH линии 42 электропитания высокого напряжения. Напряжение фазы θр может быть получено как угол относительно оси q вектора, имеющего в качестве элементов команды Vd* и Vq* напряжения.
[0038] Впоследствии определяется, пришло ли время для генерирования первого ШИМ-сигнала (этап S120). Это определение может быть выполнено в зависимости от того, прошло ли время, соответствующее вышеупомянутому интервалу Δt1, после того, как ранее был сгенерирован первый ШИМ-сигнал. Когда определяется, что пришло время для генерирования первого ШИМ-сигнала, выполняется процесс по генерированию первого ШИМ-сигнала (этапы S122 и S124). Когда определяется, что время для генерирования первого ШИМ-сигнала не наступило, процесс по генерированию первого ШИМ-сигнала не выполняется.
[0039] В процессе по генерированию первого ШИМ-сигнала, команды Vd* и Vq* напряжения по оси d и оси q конвертируются преобразованием координат в команды Vu*, Vv *, и Vw * напряжения фаз (преобразование двух фаз в три фазы), с использованием электрического угла θе электродвигателя 32 (Этап S122), и первый ШИМ-сигнал транзисторов T11-Т16 генерируется путем сравнения координатно-преобразованных команд Vu*, Vv*, и Vw* напряжений фаз с напряжением несущей частоты (этап S124).
[0040] При этом определяется, к какой из областей ШИМ регулирования - первого или второго принадлежит целевая рабочая точка, включающая в себя скорость Nm вращения и команду Тm* управления крутящим моментом электродвигателя 32 (Этапы S130 и S132). Что касается областей первого или второго ШИМ регулирования, в варианте осуществления подразумевается, что область, в которой в определенной степени можно ожидать эффекта выполнения второго ШИМ регулирования (можно ожидать в зависимости от коэффициента Rm модуляции), определяется как область второго ШИМ регулирования или область, в которой эффекта нельзя ожидать в определенной степени (нельзя ожидать, независимо от какого-либо коэффициента Rm модуляции), определяется как область первого ШИМ регулирования для повышения динамических свойств электродвигателя 32, на основе результатов эксперимента или результатов анализа, где первое ШИМ регулирование или второе ШИМ регулирование выполняются в целевых рабочих точках электродвигателя 32. Фиг. 5 представляет собой диаграмму, иллюстрирующую пример соотношения между целевой рабочей точкой электродвигателя 32 и областями первого и второго ШИМ регулирования. В примере, проиллюстрированном на фиг. 5, подразумевается, что области первого и второго ШИМ регулирования определяются следующим образом.
[0041] Подразумевается, что область, в которой скорость Nm вращения электродвигателя 32 меньше 1000 об / мин, или равна или больше 9000 об/ мин, область, в которой скорость Nm вращения электродвигателя 32 колеблется от 1000 об/мин до 9000 об / мин, и команда Тm* управления крутящим моментом колеблется от -10 Нм до 10 Нм или меньше -100 Нм, и область, в которой скорость Nm вращения электродвигателя 32 колеблется от 6000 об/мин до 9000 об/мин, и команда Тm* управления крутящим моментом равна или больше 150 Нм, определяются как область первого ШИМ регулирования.
[0042] Подразумевается, что область, в которой скорость Nm вращения электродвигателя 32 колеблется от 1000 об/мин до 6000 об / мин, и команда Тm* управления крутящим моментом равна или превышает 10 нм, или колеблется от -100 Нм до -10 Нм, и область, в которой скорость Нм вращения электродвигателя 32 колеблется от 6000 об/мин до 9000 об/мин, и команда Тm* управления крутящим моментом колеблется от 10 Нм до 150 Нм, или колеблется от -100 Нм до -10 Нм, определяется, как область второго ШИМ регулирования. В области второго ШИМ регулирования, Области 1-5, как предполагается, определяются следующим образом.
[0043] Область, в которой скорость Nm вращения электродвигателя 32 колеблется от 1000 об/мин до 3500 об/мин, и команда Тm* управления крутящим моментом равна или превышает 10 Нм или составляет от -100 Нм до -10 Нм, определяется как Область 1. Область, в которой скорость Nm вращения электродвигателя 32 колеблется от 3500 об/мин до 6000 об/мин и команда Тm* управления крутящим моментом колеблется от 10 до 150 Нм, или колеблется от -100 Нм до -10 Нм, определяется как Область 2. Область, в которой скорость Nm вращения электродвигателя 32 колеблется от 3500 об/мин до 6000 об/мин и команда Тm* управления крутящим моментом равна или больше 150 Нм, определяется как Область 3. Область, в которой скорость Nm вращения электродвигателя 32 колеблется от 6000 об/мин до 9000 об/мин, и команда Тm* управления крутящим моментом колеблется от 10 Нм до 100 Нм, или колеблется от -50 Нм до -10 Нм, определяется как Область 4. Область, в которой скорость Nm вращения электродвигателя 32 колеблется от 6000 об/мин до 9000 об/мин, и команда Тm* управления крутящим моментом составляет от 100 Нм до 150 Нм или колеблется от -100 Нм до -50 Нм, определяется как Область 5.
[0044] На фиг. 5 значения скорости Nm вращения электродвигателя 32 и команды Тm* крутящего момента, подразделяемые на область первого ШИМ регулирования и область второго ШИМ регулирования, и разбиение на области в области второго ШИМ регулирования (которая включает в себя несколько областей), являются только примерами и могут соответственно устанавливаться в зависимости от характеристик электродвигателя 32, инвертора 34, и пр.
[0045] Когда на этапах S130 и S132 определяется, что целевая рабочая точка электродвигателя 32 относится к области первого ШИМ регулирования, первое ШИМ регулирование устанавливается в качестве выполняемого регулирования (этап S140), и эта программа заканчивается. В этом случае, транзисторы T11-Т16 инвертора 34 переключаются с использованием первого ШИМ-сигнала. Соответственно, можно повысить динамические свойства электродвигателя 32.
[0046] Когда на этапах S130 и S132 определяется, что целевая рабочая точка электродвигателя 32 относится к области второго ШИМ регулирования (Области 1-5), либо первое ШИМ регулирование, либо второе ШИМ регулирование устанавливается в качестве выполняемого регулирования на основе соответствующей области из Областей 1-5, и устанавливается коэффициент Rm модуляции и импульсная последовательность РР, когда второе ШИМ регулирование устанавливается в качестве выполняемого регулирования (этап S150). При этом импульсная последовательность РР представляет собой сочетание характеристики РТ импульса при втором ШИМ регулировании и числа импульсов Np. В варианте осуществления подразумевается, что тип (вторая широтно-импульсная модуляция - ШИМа) генерирования второго ШИМ-сигнала для снижения (например, для минимизации) потерь в сердечнике электродвигателя 32, и тип (вторая широтно-импульсная модуляция - ШИМb) генерирования второго ШИМ-сигнала для снижения (например, для минимизации) гармоник (в частности, гармоник низшего порядка) напряжения или тока, используются в качестве характеристики РТ импульса.
[0047] Что касается выполняемого регулирования и импульсной последовательности РР, в данном варианте осуществления подразумевается, что соотношение между областями 1-5, коэффициент Rm модуляции, выполняемое регулирование, и импульсная последовательность РР задается или хранится как карта в ПЗУ 54, и выполняемое регулирование или импульсная последовательность РР устанавливаются на основе карты, когда заданы область и коэффициент Rm модуляции. Пример соотношений между областями 1-5, коэффициент Rm модуляции, выполняемое регулирование, и импульсная последовательность РР проиллюстрирован на фиг. 6. На фиг. 6, область регулирования прямоугольно-импульсным напряжением или регулирования с перемодуляцией (области, в которых коэффициент Rm модуляции колеблется от приблизительно 0,71 до 0,78) также проиллюстрирована в справочных целях.
[0048] Как показано на чертеже, подразумевается, что первое ШИМ регулирование устанавливается в качестве выполняемого регулирования в области, в которой коэффициент Rm модуляции меньше 0,20 в областях 1-5, а второе ШИМ регулирование устанавливается в качестве выполняемого регулирования в области, в которой коэффициент Rm модуляции составляет от 0,20 до 0,71. Это вызвано тем, что автором изобретения обнаружено, что эффект выполнения второго ШИМ регулирования относительно невелик в области, в которой коэффициент Rm модуляции меньше, чем заданный коэффициент Rmref модуляции (0,20 в примере, проиллюстрированном на фиг. 6). В области, в которой коэффициент Rm модуляции составляет от 0,20 до приблизительно 0,71, подразумевается, что вторая широтно-импульсная модуляция ШИМа выбрана в качестве характеристики РТ импульса в областях 1, 2, 4, и 5, а вторая широтно-импульсная модуляция ШИМb выбрана в качестве характеристики РТ импульса в области 3. В области, в которой коэффициент Rm модуляции составляет от 0,20 до приблизительно 0,71, подразумевается, что чем больше становится коэффициент Rm модуляции, тем меньше становится число импульсов Np. По этой причине суммарные потери на электродвигателе 32 или инверторе 34 можно уменьшить (например, минимизировать) в зависимости от коэффициента Rm модуляции с учетом того, что чем меньше становится число импульсов Np, тем больше становится пульсирующий ток, и чем больше вероятность возрастания потерь на электродвигателе 32, и чем больше число импульсов Np, тем больше будет время переключения транзисторов Т11-Т16, и тем больше вероятность возрастания потерь на инверторе 34. В данном варианте осуществления, в области, в которой коэффициент Rm модуляции относительно велик, число импульсов Np относительно уменьшено с учетом того, что потери на электродвигателе 32 вряд ли увеличатся, и совокупные потери на электродвигателе 32 и инверторе 34 вряд ли увеличатся по сравнению с областью, в которой число импульсов Np относительно невелико.
[0049] На фиг. 6, границы числа импульсов Np являются только примерами, и могут быть соответственно установлены в зависимости от характеристик электродвигателя 32, инвертора 34, и пр.
[0050] Далее определяется, что выполняемое регулирование является первым ШИМ регулированием или вторым ШИМ регулированием (этап S160), или эта процедура заканчивается, когда определяется, что выполняемое регулирование представляет собой первое ШИМ регулирование. В этом случае, транзисторы T11-Т16 инвертора 34 переключаются с использованием первого ШИМ-сигнала при первом ШИМ регулировании. Таким образом, когда целевая рабочая точка электродвигателя 32 относится ко второй области ШИМ регулирования, и коэффициент Rm модуляции меньше, чем заданный коэффициент Rmref модуляции (когда эффект от выполнения второго ШИМ регулирования относительно невелик), можно более подходящим образом приводить в действие электродвигатель 32 путем выполнения первого ШИМ регулирования с целью повышения динамических свойств электродвигателя 32.
[0051] Когда на этапе S160 определяется, что выполняемое регулирование представляет собой второе ШИМ регулирование, тогда определяется, настало ли время генерировать второй ШИМ-сигнал (этап S170). Это определение может быть выполнено в зависимости от того, прошло ли время, соответствующее интервалу Δt2, после того, как был сгенерирован первый ШИМ-сигнал. Интервал Δt2 может быть установлен, например, на значение, вычисляемое с помощью выражения (1) на основе предыдущего электрического угла (предыдущего θе), предыдущей угловой скорости (предыдущей ωm), и угла переключения (предыдущего θs [Ns+Ns-1]), который будет описан ниже. Когда определяется, что пора генерировать второй ШИМ-сигнал, выполняется процесс по генерированию второго ШИМ-сигнала (этапы S172 - S182). Когда установлено, что не время генерировать второй ШИМ-сигнал, процесс по генерированию второго ШИМ-сигнала не выполняется.
Δt2=(предыдущий θs[ns+Ns-1]-предыдущий θе)/предыдущий ωm …(1)
[0052] В процессе по генерированию второго ШИМ-сигнала, сначала устанавливается индекс Ns на основе скорости Nm вращения электродвигателя 32 (этап S172). При этом индекс Ns формирования представляет собой значение, показывающее, сколько опорных углов θstmp переключения, углов θs переключения, или режимов V переключения для формирования (установки) будет описано ниже. Индекс Ns формирования устанавливается так, чтобы быть больше, когда скорость Nm вращения электродвигателя 32 высокая, чем когда скорость вращения низкая, то есть возрастать по мере того, как скорость Nm вращения электродвигателя 32 становится выше. Это связано с тем, что, когда интервал Δt2 устанавливается на время в заданном диапазоне, и скорость Nm вращения электродвигателя 32 высокая, число переключений в интервале Δt2 может быть установлено большим, чем когда скорость вращения низкая. Индекс Ns формирования может быть установлен на фиксированное значение. В этом случае интервал Δt2 короче, когда скорость Nm вращения (угловая скорость ωm) выше, чем при низкой скорости вращения.
[0053] Далее формируется (устанавливается) число ns переключения на основе электрического угла θе электродвигателя 32 (этап S174). При этом число ns переключения представляет собой число, которое используется для установки опорного угла θstmp переключения, угла θs переключения, и режима V переключения, который будет описан позже, и формируется в диапазоне значений от 1 до N. Значение N соотносится с числом опорных углов θstmp переключения, углов θs переключения и режимов V переключения за один период электрического угла θе электродвигателя 32, и представляет собой произведение числа импульсов Np импульсной последовательности РР, значения 2 (рост и падение каждого импульса) и значения 3 (U-фаза, V-фаза и W-фаза).
[0054] Опорные углы переключения θstmp[ns]-θstmp[ns+Ns-1] чисел ns переключения на (ns+Ns-1) формируются (устанавливаются) на основе импульсной последовательности РР, коэффициента Rm модуляции, числа ns переключения, и индекса Ns формирования (этап S176). При этом опорный угол θstmp переключения представляет собой опорный угол угла θs переключения. Угол θs переключения представляет собой угол для переключения фаз напряжения фаз (ВКЛ или ВЫКЛ транзисторов для соответствующей фазы среди транзисторов T11-Т16, например, ВКЛ и ВЫКЛ транзисторов Т11 и Т14 для U-фазы) электродвигателя 32. Что касается опорных углов θstmp[ns] - θstmp[ns+Ns-1] переключения, в варианте осуществления подразумевается, что взаимосвязи между импульсной последовательностью РР, коэффициентом Rm модуляции, и опорным углом θstmp переключения чисел 1-N переключения задаются и сохраняются в виде карты в ПЗУ 54, а опорные углы θstmp[ns]-θstmp[ns+Ns-1] переключения чисел ns переключения на (ns+Ns-1) выдаются и устанавливаются на основе карты, когда даны импульсная последовательность РР, коэффициент Rm модуляции, число ns переключения, или индекс Ns формирования. Пример взаимосвязей между импульсной последовательностью РР, коэффициентом Rm модуляции, и опорным углом θstmp переключения чисел 1-N переключения проиллюстрирован на фиг. 7. На фиг. 7, значения опорного угла θstmp переключения проиллюстрированы в качестве значений θ[РР, Rm, n]
(где n составляет от 1 - N). На фиг. 7, когда импульсная последовательность РР является последовательностью Р1, коэффициент Rm модуляции имеет значение R1, число ns переключения имеет значение 5, и индекс Ns формирования имеет значение 4, значения θ[Р1, R1, 5]-θ[Р1, R1, 8] чисел 5-8 переключения устанавливаются как опорные углы θstmp[5]-θstmp[8] переключения.
[0055] Когда опорные углы θstmp[ns]-θstmp[ns+Ns-l] переключения устанавливаются таким образом, напряжения фаз θр добавляются к установленным опорным углам θstmp[ns]-θstmp[ns+Ns-1] переключения для установки углов θs[ns]-θs[ns+Ns-1] переключения (этап S178).
[0056] Далее режимы V[ns] переключения - V[ns+Ns-1] чисел ns переключения на (ns+Ns-1) устанавливаются на основе импульсной последовательности РР, числа ns переключения, и индекса Ns формирования (этап S180). При этом режим V переключения представляет собой режим, обозначающий сочетание ВКЛ или ВЫКЛ транзисторов T11-Т13, и используются режимы V0-V7. Причиной использования сочетания ВКЛ или ВЫКЛ транзисторов T11-Т13 вместо сочетания ВКЛ или ВЫКЛ транзисторов T11-Т16 является то, что соответствующее верхнее плечо и соответствующее нижнее плечо среди транзисторов T11-Т16 не включаются одновременно, и вообще отсутствие сочетания ВКЛ или ВЫКЛ транзисторов Т14-Т16 не вызывает никаких проблем. Режимы V0-V7 заключаются в следующем.
Режим V0: Все транзисторы T11- 13 выключены.
Режим V1: Транзисторы Т11 и Т12 выключены, а транзистор Т13 включен.
Режим V2: Транзисторы Т11 и Т13 выключены, а транзистор Т12 включен.
Режим V3: Транзистор Т11 выключен, а транзисторы Т12 и Т13 включены.
Режим V4: Транзистор Т11 включен, а транзисторы Т12 и Т13 выключены.
Режим V5: Транзисторы Т11 или Т13 включены, а транзистор Т12 выключен.
Режим V6: Транзисторы Т11 и Т12 включены, а транзистор Т13 выключен.
Режим V7: Все транзисторы T11-Т13 включены.
[0057] Что касается режимов V[ns] переключения - V[ns+Ns-1], в варианте осуществления подразумевается, что зависимость между импульсной последовательностью РР и режимами V переключения чисел 1-N переключения являются заданными и сохраняются в виде карты в ПЗУ 54 или режимы V[ns] переключения - V[ns+Ns-1] чисел ns переключения на (ns+Ns-1) выдаются и устанавливаются на основе карты, когда даны импульсная последовательность РР, число ns переключения, или индекс Ns формирования. Пример зависимости между импульсной последовательностью РР и режимами V переключения чисел 1-N переключения проиллюстрирован на фиг. 8. На фиг. 8, значения углов переключения θs проиллюстрированы в качестве величин θ[РР, n] (где n составляет от 1-N). На фиг. 8, когда импульсная последовательность РР является Последовательностью P1, число ns переключения имеет значение 5, или индекс Ns формирования имеет значение 4, режимы переключения V[P1, 5]-V[P1, 8] чисел 5-8 переключения устанавливаются в качестве режимов переключения V[5]-V[8].
[0058] Когда углы θs[ns]-θs[ns+Ns-1] переключения и режимы переключения V[ns]-V[ns+Ns-1] чисел ns переключения на (ns+Ns-1) устанавливаются таким образом, второй ШИМ-сигнал транзисторов T11-Т16 генерируется на основе установленных углов θs[ns]-θs[ns+Ns-1] переключения и установленных режимов переключения V[ns]-V[ns+Ns-1] (этап S182). Пример зависимости между числами 5-8 переключения, углами θs[5]-θs[8] переключения, режимами V[5]-V[8] переключения, и вторым ШИМ-сигналом транзисторов T11-Т13, когда число ns переключения имеет значение 5, а число Ns формирования имеет значение 4, проиллюстрирован на фиг. 9.
[0059] Далее вычисляются изменения в единицу времени ΔTm*, ΔNm, ΔVH, и ΔVB команды Тm* управления крутящим моментом электродвигателя 32, скорость Nm вращения электродвигателя 32, напряжение VH линии 42 электропитания высокого напряжения, и напряжение VB аккумулятора 36 (этап S190). Далее абсолютная величина изменения ΔТm* сравнивается с пороговым значением ΔTmref (этап S200), абсолютная величина изменения ΔNm сравнивается с пороговым значением ΔNmref (этап S202), абсолютная величина изменения ΔVH сравнивается с пороговым значением ΔVHref (этап S204), абсолютная величина изменения ΔVB сравнивается с пороговым значением ΔVBref (этап S206), и определяется, действительно ли проезжая дорога представляет собой дорогу с низким уровнем μ (этап S210).
[0060] При этом, пороговые значения ΔTmref, ΔNmref, ΔVHref, и ΔVBref представляют собой пороговые значения, которые используются для определения того, действительно ли команда Тm* управления крутящим моментом электродвигателя 32, скорость Nm вращения электродвигателя 32, напряжение VH линии 42 электропитания высокого напряжения, и напряжение VB аккумулятора 36 внезапно изменились. Определение того, действительно ли проезжая дорога представляет собой дорогу с низким уровнем μ, может быть выполнено путем проверки, находится ли сигнал переключения на дорогу с низким уровнем μ. на переключателе 89 сигнала дороги с низким уровнем μ в состоянии ВКЛ, путем сравнения коэффициента трения проезжей дороги, оцениваемым на основе ускорения вращения ведущего вала 26, с пороговым значением, либо путем сравнения коэффициента трения проезжей дороги, оцениваемым на основе ускорения вращения приводных колес 22а и 22b, с пороговым значением. Процессы этапов S200-S206 представляют собой процессы определения того, действительно ли состояние системы привода, включающей в себя электродвигатель 32, инвертор 34, аккумулятор 36, и повышающий преобразователь 40, внезапно изменяется, а процесс этапа S210 представляет собой процесс определения того, действительно ли прогнозируется внезапное изменение состояния системы привода.
[0061] Когда определяется на этапах S200-S206, что абсолютная величина изменения ΔТm* меньше, чем пороговое значение ΔTmref, абсолютная величина изменения ΔNm меньше, чем пороговое значение ΔNmref, абсолютная величина изменения ΔVH меньше, чем пороговое значение ΔVHref, или абсолютная величина изменения ΔVB меньше, чем пороговое значение ΔVBref, и определено на этапе S210, что проезжая дорога не является дорогой с низким уровнем μ, и определено, что состояние системы привода внезапно не изменялось, делается определение, что внезапное изменение состояния системы привода не прогнозируется, и эта процедура заканчивается. Поскольку теперь считается, что выполняемое регулирование определено, как второе ШИМ регулирование на этапе S160, транзисторы T11-Т16 инвертора 34 переключаются с использованием второго ШИМ-сигнала. Соответственно, можно снизить потери в сердечнике электродвигателя 32 или снизить гармоники напряжения либо тока в зависимости от импульсной последовательности РР, включающей в себя характеристику РТ импульса (вторая ШИМа или вторая ШИМb), и число импульсов Np. В результате, можно более подходящим образом приводить в действие электродвигатель 32.
[0062] Когда на этапе S200 определено, что абсолютная величина изменения ΔТm* равна или больше, чем пороговое значение ΔTmref, на этапе S202 определено, что абсолютная величина изменения ΔNm равна или больше, чем пороговое значение ΔNmref, на этапе S204 определено, что абсолютная величина изменения ΔVH равна или больше, чем пороговое значение ΔVHref, либо на этапе S206 определено, что абсолютная величина изменения ΔVB равна или больше, чем пороговое значение ΔVBref (этап S206), делается определение, что состояние системы привода внезапно изменяется, первое ШИМ регулирование переустанавливается в качестве выполняемого регулирования (этап S220), и процедура заканчивается. Когда на этапе S210 определено, что проезжая дорога представляет собой дорогу с низким уровнем μ, прогнозируется внезапное изменение состояния системы привода, первое ШИМ регулирование переустанавливается в качестве выполняемого регулирования (этап S220), и процедура заканчивается. Как описано выше, когда выполняется второе ШИМ регулирование, динамические свойства электродвигателя 32 становятся ниже, чем когда выполняется первое ШИМ регулирование. В варианте осуществления подразумевается, что первое ШИМ регулирование выполняется, когда состояние системы привода внезапно изменяется или прогнозируется внезапное изменение состояния системы привода с учетом вышеупомянутого факта. Соответственно, можно повысить динамические свойства электродвигателя 32 и более подходящим образом приводить в действие электродвигатель 32.
[0063] В электрическом транспортном средстве 20 согласно вышеупомянутому варианту осуществления, первое ШИМ регулирование выполняется, когда осуществляется регулирование посредством синусоидальной ШИМ, и целевая рабочая точка (скорость Nm вращения и команда Тm* управления крутящим моментом) электродвигателя 32 относится к области первого ШИМ регулирования, а второе ШИМ регулирование, в основном выполняется тогда, когда целевая рабочая точка электродвигателя 32 относится к области второго ШИМ регулирования. Соответственно, можно повысить динамические свойства электродвигателя 32, когда выполняется первое ШИМ регулирование, и можно снизить потери в сердечнике электродвигателя 32, либо уменьшить гармоники напряжения или тока, когда выполняется второе ШИМ регулирование. Поскольку область, в которой можно ожидать эффекта от выполнения второго ШИМ регулирования, в определенной степени определяется, как область второго ШИМ регулирования, а область, в которой эффект не может ожидаться в определенной степени, определяется как область первого ШИМ регулирования, с целью повышения динамических свойств электродвигателя 32, можно более подобающим образом приводить в действие электродвигатель, в зависимости от целевой рабочей точки.
[0064] В электрическом транспортном средстве 20 согласно варианту осуществления, когда выполняется регулирование посредством синусоидальной ШИМ, целевая рабочая точка электродвигателя 32 относится к области второго ШИМ регулирования, и коэффициент Rm модуляции меньше, чем заданный коэффициент Rmref модуляции, выполняется первое ШИМ регулирование. Соответственно, когда эффект от выполнения второго ШИМ регулирования относительно невелик, можно повысить динамические свойства электродвигателя 32 и более подобающим образом приводить в действие электродвигатель 32.
[0065] В электрическом транспортном средстве 20 согласно варианту осуществления, когда выполняется регулирование посредством синусоидальной ШИМ, целевая рабочая точка электродвигателя 32 относится к области второго ШИМ регулирования, и состояние системы привода внезапно изменяется, либо прогнозируется внезапное изменение состояния системы привода, выполняется первое ШИМ регулирование. Когда выполняется второе ШИМ регулирование, динамические свойства электродвигателя 32 ниже, чем таковые, когда выполняется первое ШИМ регулирование. Соответственно, путем выполнения первого ШИМ регулирования с целью повышения динамических свойств электродвигателя 32, можно более подобающим образом приводить в действие электродвигатель 32.
[0066] В электрическом транспортном средстве 20 согласно варианту осуществления, когда выполняется регулирование посредством синусоидальной ШИМ, и определено на этапах S130 и S132 на фиг. 3, что целевая рабочая точка электродвигателя 32 относится к области второго ШИМ регулирования, подразумевается, что второе ШИМ регулирование устанавливается в качестве выполняемого регулирования, когда определено на этапе S150, что коэффициент Rm модуляции равен или больше, чем заданный коэффициент Rmref модуляции, и первое ШИМ регулирование устанавливается в качестве выполняемого регулирования, когда коэффициент Rm модуляции меньше, чем заданный коэффициент Rmref модуляции. Однако второе ШИМ регулирование может быть установлено в качестве выполняемого регулирования независимо от того, что коэффициент Rm модуляции равен или больше, или меньше, чем заданный коэффициент Rmref модуляции на этапе S150. В этом случае, как и для области, в которой коэффициент Rm модуляции меньше, чем заданный коэффициент Rmref модуляции, импульсная последовательность РР может быть установлена на основе области (целевой рабочей точки электродвигателя 32) и коэффициента Rm модуляции.
[0067] В электрическом транспортном средстве 20 согласно варианту осуществления, когда выполняется регулирование посредством синусоидальной ШИМ, и второе ШИМ регулирование устанавливается в качестве выполняемого регулирования на этапе S150 на фиг. 3, на этапах S200-S206 определяется с использованием изменений в единицу времени ΔTm*, ΔNm, ΔVH, и ΔVB команды Тm* управления крутящим моментом электродвигателя 32, скорости Nm вращения электродвигателя 32, напряжения VH линии 42 электропитания высокого напряжения, и напряжения VB аккумулятора 36, действительно ли состояние системы привода внезапно изменилось. Тем не менее, можно определить, действительно ли состояние системы привода внезапно изменилось, используя часть изменений в единицу времени ΔTm*, ΔNm, ΔVH, и ΔVB команды Tm* управления крутящим моментом электродвигателя 32, скорости Nm вращения электродвигателя 32, напряжения VH линии 42 электропитания высокого напряжения, и напряжения VB аккумулятора 36. Можно определить, действительно ли состояние системы привода внезапно изменилось, используя другие параметры, такие как изменения в единицу времени требуемой мощности Pm*(=Tm*⋅Nm) электродвигателя 32, действительные значения фазных токов Iu и Iv электродвигателя 32, тока IL, текущего в стабилизатор L повышающего преобразователя 40, или напряжение VL линии 44 электропитания низкого напряжения.
[0068] В электрическом транспортном средстве 20 согласно варианту осуществления, когда выполняется регулирование посредством синусоидальной ШИМ, и второе ШИМ регулирование устанавливается в качестве выполняемого регулирования на этапе S150 с фиг. 3, определяется на этапах S200-S206, действительно ли состояние системы привода внезапно изменилось, и определяется на этапе S210, действительно ли прогнозируется внезапное изменение состояния системы привода. Однако, определение того, действительно ли состояние системы привода внезапно изменилось, может выполняться, однако, определение того, действительно ли прогнозируется внезапное изменение состояния системы привода, может быть не выполнено. Определение того, действительно ли прогнозируется внезапное изменение состояния системы привода, может выполняться, однако определение того, действительно ли состояние системы привода внезапно изменилось, может быть не выполнено. Как определение того, действительно ли состояние системы привода внезапно изменилось, так и определение того, действительно ли прогнозируется внезапное изменение состояния системы привода, может быть не выполнено.
[0069] В электрическом транспортном средстве 20 согласно варианту осуществления, два типа, которые включают в себя тип (вторая ШИМа) по генерированию второго ШИМ-сигнала для снижения потерь в сердечнике электродвигателя 32 и тип (вторая ШИМb) по генерированию второго ШИМ-сигнала с целью уменьшения гармоник напряжения либо тока, используются в качестве характеристики РТ импульса импульсной последовательности РР, используемой для генерирования второго ШИМ-сигнала. Однако три или более характеристики РТ импульса могут использоваться в качестве характеристики РТ импульса. В этом случае, например, могут быть использованы тип генерирования второго ШИМ-сигнала для снижения потерь в сердечнике электродвигателя 32, тип генерирования второго ШИМ-сигнала для снижения омических потерь электродвигателя 32, тип генерирования второго ШИМ-сигнала для снижения пульсаций крутящего момента электродвигателя 32, тип генерирования второго ШИМ-сигнала для снижения потерь инвертора 34, тип генерирования второго ШИМ-сигнала для снижения общих потерь электродвигателя 32 и инвертора 34, тип генерирования второго ШИМ-сигнала для уменьшения гармоник напряжения, а также тип генерирования второго ШИМ-сигнала для уменьшения гармоник тока. Только одна характеристика может использоваться в качестве характеристики РТ импульса. В этом случае, последовательность на основе только числа импульсов Np может быть установлен в качестве импульсной последовательности PP.
[0070] В электрическом транспортном средстве 20 согласно варианту осуществления, при генерировании второго ШИМ-сигнала, опорный угол переключения θstmp устанавливается на основе импульсной последовательности РР (характеристики РТ импульса и числа импульсов Np), а коэффициент Rm модуляции и опорный угол θstmp переключения с использованием напряжения фазы θp для установки угла θs переключения. Однако угол переключения θs может быть установлен непосредственно на основе импульсной последовательности РР, коэффициента Rm модуляции, и напряжения фазы θp.
[0071] В электрическом транспортном средстве 20 согласно варианту осуществления, повышающий преобразователь 40 размещен между аккумулятором 36 и инвертором 34, но повышающий преобразователь 40 может быть не предусмотрен.
[0072] В электрическом транспортном средстве 20 согласно варианту осуществления, используется конфигурация, включающая в себя электродвигатель 32, инвертор 34, и аккумулятор 36. Однако, как проиллюстрировано в гибридном транспортном средстве 120 согласно модифицированному примеру на фиг. 10, может быть применена конфигурация, включающая в себя двигатель 122, планетарный редуктор 124, электродвигатель 132 и инвертор 134 в дополнение к электродвигателю 32 и инвертору 34. При этом электродвигатель 132 соединен с солнечной шестерней планетарного редуктора 124, двигатель 122 соединен с водилом редуктора, а ведущий вал 26 или электродвигатель 32 соединены с его зубчатым венцом. Инвертор 134 соединен с электродвигателем 132 и также соединен с линией 42 электропитания высокого напряжения.
[0073] В варианте осуществления электродвигатель 32 функционирует как «электродвигатель», инвертор 34 функционирует как «инвертор», аккумулятор 36 функционирует как «аккумулятор», и электронный блок 50 управления функционирует как «электронный блок управления».
[0074] В то время как объекты изобретения были описаны со ссылкой на вариант осуществления, вариант осуществления является лишь конкретным примером изобретения. Изобретение не ограничивается вариантом осуществления и может быть модифицировано в различных формах в пределах сути изобретения.
[0075] Изобретение может применяться в промышленности по производству транспортных средств.







Изобретение относится к области управления транспортным средством на электротяге. Транспортное средство выполняет первое ШИМ регулирование для генерирования первого ШИМ-сигнала для множества переключающих элементов, чтобы переключать множество переключающих элементов путем сравнения команд напряжения фаз на основе команды управления крутящим моментом с напряжением несущей частоты. При этом целевая рабочая точка, включающая в себя скорость вращения и команду управления крутящим моментом электродвигателя, находится вне заранее заданной области. Транспортное средство выполняет второе ШИМ регулирование для генерирования второго ШИМ-сигнала для множества переключающих элементов, чтобы переключать множество переключающих элементов на основе коэффициента модуляции напряжения, а также напряжения фазы на основе команды управления крутящим моментом и числа импульсов в заранее заданный период электрического угла электродвигателя, или первое ШИМ регулирование, когда целевая рабочая точка находится внутри заданной области. Достигается снижение потерь электроэнергии. 9 з.п. ф-лы, 10 ил. 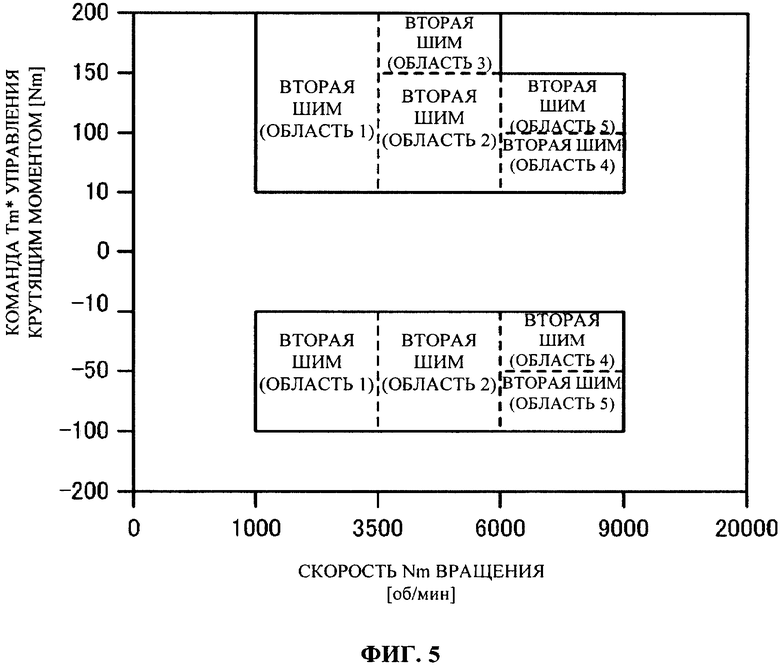
1. Транспортное средство, содержащее:
электродвигатель, выполненный с возможностью приведения в движение транспортного средства;
инвертор, выполненный с возможностью приведения в действие электродвигателя путем переключения множества переключающих элементов;
аккумулятор, выполненный с возможностью обмена электроэнергией с электродвигателем через инвертор; и
электронный блок управления, выполненный с возможностью управления инвертором на основе команды управления крутящим моментом электродвигателя, при этом электронный блок управления выполнен с возможностью
выполнения первого регулирования посредством широтно-импульсной модуляции (далее, ШИМ регулирования) для генерирования первого сигнала широтно-импульсной модуляции (далее, ШИМ сигнала) для множества переключающих элементов, чтобы переключать множество переключающих элементов, путем сравнения команд управления напряжением фаз на основе команды управления крутящим моментом с напряжением несущей частоты, когда целевая рабочая точка, включающая в себя скорость вращения и команду управления крутящим моментом электродвигателя, находится вне заранее заданной области, или
выбора и выполнения второго ШИМ регулирования для генерирования второго ШИМ-сигнала для множества переключающих элементов, чтобы переключать множество переключающих элементов, на основе коэффициента модуляции напряжения, а также напряжения фазы на основе команды управления крутящим моментом и числа импульсов в заранее заданный период электрического угла электродвигателя, или первого ШИМ регулирования, когда целевая рабочая точка находится внутри заранее заданной области.
2. Транспортное средство по п. 1, в котором электронный блок управления выполнен с возможностью установки угла переключения на основе коэффициента модуляции, числа импульсов и напряжения фазы, установки режима переключения на основе числа импульсов и для генерирования второго ШИМ-сигнала на основе угла переключения и режима переключения при генерировании второго ШИМ-сигнала.
3. Транспортное средство по п. 1, в котором электронный блок управления выполнен с возможностью генерирования первого ШИМ-сигнала в первый интервал, соответствующий половине периода напряжения несущей частоты или периоду напряжения несущей частоты при выполнении первого ШИМ регулирования, и для генерирования второго ШИМ-сигнала во второй интервал, более длинный, чем первый интервал, при выполнении второго ШИМ регулирования
4. Транспортное средство по п. 1, в котором электронный блок управления выполнен с возможностью выполнения первого ШИМ регулирования, когда целевая рабочая точка находится внутри заранее заданной области и коэффициент модуляции меньше, чем заранее заданный коэффициент модуляции.
5. Транспортное средство по любому из пп. 1-4, в котором электронный блок управления выполнен с возможностью установки числа импульсов на основе целевой рабочей точки и коэффициента модуляции, когда целевая рабочая точка находится внутри заранее заданной области.
6. Транспортное средство по п. 5, в котором электронный блок управления выполнен с возможностью установки числа импульсов на основе целевой рабочей точки и коэффициента модуляции; установки одной из множества характеристик, включая характеристику генерирования второго ШИМ-сигнала для снижения потерь в сердечнике электродвигателя, а также характеристику генерирования второго ШИМ-сигнала для уменьшения гармоник в качестве выбранной характеристики, и для генерирования второго ШИМ-сигнала на основе коэффициента модуляции, напряжения фазы, числа импульсов и выбранной характеристики, когда целевая рабочая точка находится внутри заранее заданной области.
7. Транспортное средство по любому из пп. 1-4, в котором электронный блок управления выполнен с возможностью выполнения первого ШИМ регулирования, когда целевая рабочая точка находится внутри заранее заданной области, состояние системы привода, включающей в себя электродвигатель, инвертор и аккумулятор, внезапно изменяется, или когда прогнозируется внезапное изменение в системе привода.
8. Транспортное средство по п. 7, в котором электронный блок управления выполнен с возможностью определения, что состояние системы привода внезапно изменилось, и выполнения первого ШИМ регулирования, когда изменение в единицу времени, по меньшей мере, одного из следующего: команды управления крутящим моментом, скорости вращения, напряжения инвертора или напряжения аккумулятора, больше, чем пороговое значение.
9. Транспортное средство по п. 7, в котором электронный блок управления выполнен с возможностью определения, что прогнозируется внезапное изменение состояния системы привода, и выполнения первого ШИМ регулирования, когда проезжая дорога представляет собой дорогу с низким уровнем μ.
10. Транспортное средство по п. 5, в котором электронный блок управления выполнен с возможностью
установки числа импульсов на основе целевой рабочей точки и коэффициента модуляции;
установки одной из множества характеристик, включая характеристику генерирования второго ШИМ-сигнала для снижения потерь в сердечнике электродвигателя, характеристику генерирования второго ШИМ-сигнала для снижения омических потерь электродвигателя, характеристику генерирования второго ШИМ-сигнала для снижения пульсаций крутящего момента электродвигателя, характеристику генерирования второго ШИМ-сигнала для снижения потерь инвертора, характеристику генерирования второго ШИМ-сигнала для снижения общих потерь электродвигателя или инвертора, характеристику генерирования второго ШИМ-сигнала для уменьшения гармоник напряжения, а также характеристику генерирования второго ШИМ-сигнала для уменьшения гармоник напряжения и характеристику генерирования второго ШИМ-сигнала для уменьшения гармоник тока, в качестве выбранной характеристики; и
для генерирования второго ШИМ-сигнала на основе коэффициента модуляции, напряжения фазы, числа импульсов и выбранной характеристики;
когда целевая рабочая точка находится внутри заранее заданной области.
| JP 2013162660 A, 19.08.2013 | |||
| JP 2014075937 A, 24.04.2014 | |||
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1997 |
|
RU2193814C2 |

