Область техники
Настоящее изобретение относится к устройству управления электромотором.
Уровень техники
В качестве типа устройства управления электромотором, предложена технология, в которой управление переключением переключающего элемента инвертора выполняется в квадратно–волновом режиме управления с использованием нового импульсного шаблона, с тремя импульсами в один период, когда рабочая точка электромотора находится в резонансной области, в которой резонанс возникает в схеме усиления (см., например, публикацию не прошедшей экспертизу заявки на патент Японии №2017–131094). В новом импульсном шаблоне, шестая электрическая частота мощности приведения в действие электромотора задается большей посредством управления переключением, и как результат, исключается возникновение LC–резонанса в схеме усиления.
Сущность изобретения
Тем не менее, при переключении с режима управления с широтно–импульсной модуляцией (режима PWM–управления) на квадратно–волновой режим управления в устройстве управления электромотором, описанном выше, может возникать резонанс в области, в которой степень модуляции является высокой (например, в области, в которой степень модуляции составляет 0,70 или выше). Считается, что, когда управление переключением переключающего элемента инвертора в режиме PWM–управления выполняется в области, в которой степень модуляции является высокой, шестой компонент электрической частоты мощности приведения в действие электромотора задается большим, и когда частота, имеющая компонент, вплотную приближается к резонансной LC–частоте, возникает резонанс.
Помимо этого, в квадратно–волновом режиме управления, когда множество шаблонов переключения используются согласно числу оборотов электромотора, может возникать вибрация вследствие флуктуации крутящего момента, вызываемая посредством внезапного изменения степени модуляции при переключении между множеством шаблонов переключения.
Устройство управления электромотором согласно настоящему изобретению ограничивает резонанс или вибрацию, которая может возникать при переключении режима управления или шаблона переключения.
Устройство управления электромотором согласно настоящему изобретению использует следующие аспекты.
Устройство управления электромотором согласно первому аспекту настоящего изобретения монтируется на приводном устройстве, которое включает в себя электромотор, инвертор, который приводит в действие электромотор, и устройство накопления мощности, которое обменивается мощностью с электромотором через инвертор. Устройство управления электромотором включает в себя электронный модуль управления, выполненный с возможностью выполнять управление переключением переключающего элемента инвертора в режиме управления с широтно–импульсной модуляцией, когда степень модуляции меньше первого заданного значения, выполнять управление переключением переключающего элемента инвертора в квадратно–волновом режиме управления, когда степень модуляции превышает или равна второму заданному значению, которое превышает первое заданное значение, и выполнять управление переключением переключающего элемента инвертора в промежуточном режиме управления, когда степень модуляции превышает или равна первому заданному значению и меньше второго заданного значения. Промежуточный режим управления использует шаблон переключения, в котором, в импульсном шаблоне в квадратно–волновом режиме управления, зазор формируется в случае, если импульс присутствует в то время, когда фазный ток переходит через нуль, и короткий импульс, имеющий ширину, идентичную ширине зазора, формируется в случае, если импульс не присутствует в то время, когда фазный ток переходит через нуль.
В устройстве управления электромотором согласно первому аспекту, электронный модуль управления выполняет управление переключением переключающего элемента инвертора в режиме управления с широтно–импульсной модуляцией, когда степень модуляции меньше первого заданного значения, выполняет управление переключением переключающего элемента инвертора в квадратно–волновом режиме управления, когда степень модуляции превышает или равна второму заданному значению, которое превышает первое заданное значение, и выполняет управление переключением переключающего элемента инвертора в промежуточном режиме управления, когда степень модуляции превышает или равна первому заданному значению и меньше второго заданного значения, который имеет шаблон переключения, в котором, в импульсном шаблоне в квадратно–волновом режиме управления, зазор формируется в случае, если импульс присутствует в то время, когда фазный ток переходит через нуль, и короткий импульс, имеющий ширину, идентичную ширине зазора, формируется в случае, если импульс не присутствует в то время, когда фазный ток переходит через нуль. В связи с этим, поскольку степень модуляции внезапно не изменяется с первого заданного значения на второе заданное значение, можно ограничивать вибрацию, вызываемую флуктуацией крутящего момента. Помимо этого, посредством переключения с режима управления с широтно–импульсной модуляцией на квадратно–волновой режим управления через промежуточный режим управления, режим управления с широтно–импульсной модуляцией не используется в области, в которой степень модуляции является высокой таким образом, что возникает резонанс, и в силу этого можно ограничивать резонанс, который может возникать вследствие использования режима управления с широтно–импульсной модуляцией в области, в которой степень модуляции является высокой.
В первом аспекте, промежуточный режим управления может представлять собой режим с использованием шаблона переключения, в котором ширины зазора и короткого импульса снижаются по мере того, как степень модуляции увеличивается. В связи с этим, можно плавно изменять степень модуляции или ширины зазора и короткого импульса при переключении с режима управления с широтно–импульсной модуляцией на квадратно–волновой режим управления через промежуточный режим управления.
В первом аспекте, электронный модуль управления может постепенно изменять ширины зазора и короткого импульса до тех пор, пока ширины не становятся нулевыми при переключении с промежуточного режима управления на квадратно–волновой режим управления. В связи с этим, можно ограничивать флуктуацию крутящего момента, которая может возникать при переключении с промежуточного режима управления на квадратно–волновой режим управления.
В первом аспекте, квадратно–волновой режим управления может использовать квадратно–волновой импульсный шаблон, в котором первая половина или вторая половина одного периода становится квадратно–волновым импульсом, когда число оборотов электромотора превышает или равно первому заданному числу оборотов, которое превышает первую резонансную область, и использует первый шаблон переключения, в котором один или более зазоров формируются в области, в которой квадратно–волновой импульс присутствует, и один или более коротких импульсов, имеющих ширину, идентичную ширине зазоров, формируются одновременно с тем, когда формируются зазоры, в области, в которой квадратно–волновой импульс не присутствует в квадратно–волновом импульсном шаблоне. Первый шаблон переключения ограничивает LC–резонанс в первой резонансной области. Второе заданное значение больше тогда, когда число оборотов электромотора превышает или равно первому заданному числу оборотов, чем тогда, когда число оборотов меньше первого заданного числа оборотов. В связи с этим, можно ограничивать LC–резонанс в первой резонансной области.
В первом аспекте, квадратно–волновой режим управления может использовать второй шаблон переключения, когда число оборотов электромотора меньше второго заданного числа оборотов, которое меньше первого заданного числа оборотов. Второй шаблон переключения имеет большее число зазоров и коротких импульсов, чем зазоры и короткие импульсы первого шаблона переключения, и ограничивает LC–резонанс во второй резонансной области, включенной в диапазон числа оборотов, меньшего второго заданного числа оборотов. Второе заданное значение меньше тогда, когда число оборотов электромотора меньше второго заданного числа оборотов, чем тогда, когда число оборотов превышает или равно второму заданному числу оборотов. В связи с этим, можно ограничивать LC–резонанс во второй резонансной области.
Устройство управления электромотором согласно второму аспекту настоящего изобретения монтируется на приводном устройстве, которое включает в себя электромотор, инвертор, который приводит в действие электромотор, и устройство накопления мощности, которое обменивается мощностью с электромотором через инвертор. Устройство управления электромотором включает в себя электронный модуль управления, выполненный с возможностью выполнять управление переключением переключающего элемента инвертора посредством переключения между режимом управления с широтно–импульсной модуляцией и квадратно–волновым режимом управления согласно степени модуляции. Квадратно–волновой режим управления использует квадратно–волновой импульсный шаблон, в котором первая половина или вторая половина одного периода становится квадратно–волновым импульсом, когда число оборотов электромотора превышает или равно первому заданному числу оборотов, которое превышает первую резонансную область, и использует первый шаблон переключения, в котором один или более зазоров формируются в области, в которой квадратно–волновой импульс присутствует, и один или более коротких импульсов, имеющих ширину, идентичную ширине зазоров, формируются одновременно с тем, когда формируются зазоры, в области, в которой квадратно–волновой импульс не присутствует в квадратно–волновом импульсном шаблоне. Первый шаблон переключения ограничивает LC–резонанс в первой резонансной области. Электронный модуль управления выполняет управление первым постепенным варьированием, при котором ширины зазоров и коротких импульсов первого шаблона переключения постепенно изменяются таким образом, что они становятся небольшими при переключении с первого шаблона переключения на квадратно–волновой импульсный шаблон.
В устройстве управления электромотором согласно второму аспекту, электронный модуль управления выполнен с возможностью выполнять управление переключением переключающего элемента инвертора, который приводит в действие электромотор посредством переключения, между режимом управления с широтно–импульсной модуляцией и квадратно–волновым режимом управления согласно степени модуляции. Квадратно–волновой режим управления использует квадратно–волновой импульсный шаблон, в котором первая половина или вторая половина периода становится квадратно–волновым импульсом, когда число оборотов электромотора превышает или равно первому заданному числу оборотов, которое превышает первую резонансную область, и использует первый шаблон переключения, в котором один или более зазоров формируются в области, в которой квадратно–волновой импульс присутствует в квадратно–волновом импульсном шаблоне, и один или более коротких импульсов, имеющих ширину, идентичную ширине зазоров, формируются одновременно с тем, когда формируются зазоры, в области, в которой не присутствует квадратно–волновой импульс. Первый шаблон переключения ограничивает LC–резонанс в первой резонансной области. В связи с этим, можно ограничивать резонанс, который может возникать, когда число оборотов электромотора меньше первого заданного числа оборотов. Кроме того, электронный модуль управления выполнен с возможностью выполнять управление первым постепенным варьированием, при котором ширины зазоров и коротких импульсов первого шаблона переключения постепенно изменяются таким образом, что они становятся небольшими при переключении с первого шаблона переключения на квадратно–волновой импульсный шаблон. В связи с этим, можно ограничивать вибрацию вследствие флуктуации крутящего момента, возникающую вместе с внезапным изменением степени модуляции, которое может возникать при переключении с первого шаблона переключения на квадратно–волновой импульсный шаблон.
Во втором аспекте, в качестве управления первым постепенным варьированием, электронный модуль управления может задавать ширины зазоров и коротких импульсов или степень модуляции пошагово за множество шагов. В связи с этим, можно изменять ширины зазора и короткого импульса или степень модуляции пошагово таким образом, чтобы переключаться с первого шаблона переключения на квадратно–волновой импульсный шаблон, за счет этого ограничивая вибрацию вследствие флуктуации крутящего момента, которая может возникать во время переключения.
Во втором аспекте, в качестве управления первым постепенным варьированием, когда число оборотов электромотора превышает первое пороговое число оборотов для переключения первого шаблона переключения на квадратно–волновой импульсный шаблон, электронный модуль управления может задавать степень модуляции таким образом, что она постепенно увеличивается со степени модуляции первого шаблона переключения к степени модуляции квадратно–волнового импульсного шаблона, и задавать ширины зазора и короткого импульса посредством использования заданной степени модуляции и взаимосвязи, в которой ширины снижаются по мере того, как степень модуляции увеличивается. В связи с этим, можно плавно изменять ширины зазора и короткого импульса или степень модуляции таким образом, чтобы переключаться с первого шаблона переключения на квадратно–волновой импульсный шаблон, за счет этого ограничивая вибрацию вследствие флуктуации крутящего момента, которая может возникать во время переключения.
Во втором аспекте, в качестве управления первым постепенным варьированием, электронный модуль управления может задавать фазу напряжения согласно заданной степени модуляции и выполнять управление переключением переключающего элемента инвертора таким образом, что заданная фаза напряжения достигается в первом шаблоне переключения, в котором используются заданные ширины зазоров и коротких импульсов. В связи с этим, можно ограничивать флуктуацию крутящего момента.
Во втором аспекте, квадратно–волновой режим управления может использовать второй шаблон переключения, когда число оборотов электромотора меньше второго заданного числа оборотов, которое меньше первого заданного числа оборотов. Второй шаблон переключения имеет большее число зазоров и коротких импульсов, чем зазоры и короткие импульсы первого шаблона переключения, и ограничивает LC–резонанс во второй резонансной области, включенной в диапазон числа оборотов, меньшего второго заданного числа оборотов. При переключении со второго шаблона переключения на первый шаблон переключения, электронный модуль управления может выполнять управление вторым постепенным варьированием, при котором ширины зазоров и коротких импульсов второго шаблона переключения, которые не соответствуют зазорам и коротким импульсам первого шаблона переключения, постепенно изменяются таким образом, что они становятся небольшими. В связи с этим, можно ограничивать вибрацию, которая может возникать, когда число оборотов электромотора меньше второго заданного числа оборотов, и вибрацию вследствие флуктуации крутящего момента, возникающую вместе с внезапным изменением степени модуляции, которое может возникать во время переключения со второго шаблона переключения на первый шаблон переключения.
Во втором аспекте, в качестве управления вторым постепенным варьированием, электронный модуль управления может задавать ширины зазоров и коротких импульсов или степень модуляции пошагово за множество шагов. В связи с этим, можно изменять ширины зазора и короткого импульса или степень модуляции пошагово таким образом, чтобы переключаться со второго шаблона переключения на первый шаблон переключения, за счет этого ограничивая вибрацию вследствие флуктуации крутящего момента, которая может возникать во время переключения.
Во втором аспекте, в качестве управления вторым постепенным варьированием, когда число оборотов электромотора превышает второе пороговое число оборотов для переключения второго шаблона переключения на первый шаблон переключения, электронный модуль управления может задавать степень модуляции таким образом, что она постепенно увеличивается со степени модуляции второго шаблона переключения к степени модуляции первого шаблона переключения, и задавать ширины зазора и короткого импульса посредством использования заданной степени модуляции и взаимосвязи, в которой ширины снижаются по мере того, как степень модуляции увеличивается. В связи с этим, можно плавно изменять ширины зазора и короткого импульса или степень модуляции таким образом, чтобы переключаться со второго шаблона переключения на первый шаблон переключения, за счет этого ограничивая вибрацию вследствие флуктуации крутящего момента, которая может возникать во время переключения.
Во втором аспекте, в качестве управления вторым постепенным варьированием, электронный модуль управления может задавать фазу напряжения согласно заданной степени модуляции и выполнять управление переключением переключающего элемента инвертора таким образом, что заданная фаза напряжения достигается во втором шаблоне переключения, в котором используются заданные ширины зазоров и коротких импульсов. В связи с этим, можно ограничивать флуктуацию крутящего момента.
Во втором аспекте, в качестве управления вторым постепенным варьированием при переключении со второго шаблона переключения на первый шаблон переключения, электронный модуль управления может постепенно изменять один или более зазоров и коротких импульсов, из числа зазоров и коротких импульсов во втором шаблоне переключения, соответствующих зазору и короткому импульсу в первом шаблоне переключения таким образом, что время и ширины соответствующего зазора и короткого импульса совпадают со временем и ширинами зазора и короткого импульса в первом шаблоне переключения. В связи с этим, можно плавно изменять время зазора и короткого импульса, из числа зазоров и коротких импульсов во втором шаблоне переключения, соответствующих зазору и короткому импульсу в первом шаблоне переключения, при переключении со второго шаблона переключения на первый шаблон переключения, за счет этого ограничивая вибрацию, возникающую вместе с флуктуацией крутящего момента, которая может возникать во время переключения.
Краткое описание чертежей
Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является схемой, принципиально иллюстрирующей конфигурацию электротранспортного средства, на котором монтируется устройство управления электромотором согласно первому варианту осуществления настоящего изобретения;
Фиг. 2 является блок–схемой последовательности операций способа, иллюстрирующей пример обработки задания режима управления, выполняемой посредством электронного модуля управления;
Фиг. 3 является схемой, иллюстрирующей пример взаимосвязи между числом оборотов электромотора, крутящим моментом и режимом управления;
Фиг. 4 является блок–схемой последовательности операций способа, иллюстрирующей пример обработки задания импульсного шаблона в квадратно–волновом режиме управления, выполняемой посредством электронного модуля управления;
Фиг. 5 является схемой, иллюстрирующей пример квадратного импульсного шаблона, первого шаблона переключения и второго шаблона переключения;
Фиг. 6 является блок–схемой последовательности операций способа, иллюстрирующей пример обработки задания импульсного шаблона в промежуточном режиме управления, выполняемой посредством электронного модуля управления;
Фиг. 7 является схемой, иллюстрирующей пример промежуточного квадратного импульсного шаблона, промежуточного первого шаблона переключения и промежуточного второго шаблона переключения;
Фиг. 8 является схемой, иллюстрирующей пример карты задания ширин зазоров;
Фиг. 9 является схемой, иллюстрирующей пример взаимосвязи между числом оборотов электромотора, крутящим моментом и режимом управления в модифицированном примере;
Фиг. 10 является блок–схемой последовательности операций способа, иллюстрирующей пример обработки задания режима управления в модифицированном примере;
Фиг. 11 является блок–схемой последовательности операций способа, иллюстрирующей пример обработки задания импульсного шаблона в промежуточном режиме управления в модифицированном примере;
Фиг. 12 является схемой, описывающей пример взаимосвязи между числом оборотов электромотора, крутящим моментом и режимом управления в модифицированном примере;
Фиг. 13 является схемой, описывающей пример взаимосвязи между числом оборотов электромотора, крутящим моментом и режимом управления в модифицированном примере;
Фиг. 14 является схемой, описывающей пример взаимосвязи между числом оборотов электромотора, крутящим моментом и режимом управления в модифицированном примере;
Фиг. 15 является блок–схемой последовательности операций способа, иллюстрирующей пример обработки переключения между первым шаблоном переключения и квадратно–волновым импульсным шаблоном, выполняемой посредством электронного модуля управления согласно второму варианту осуществления;
Фиг. 16 является схемой, иллюстрирующей квадратно–волновой импульсный шаблон и первый шаблон переключения вместе с ширинами зазора и короткого импульса;
Фиг. 17 является схемой, иллюстрирующей пример карты задания ширин зазоров во время переключения;
Фиг. 18 является схемой, иллюстрирующей пример взаимосвязи между крутящим моментом электромотора и фазой напряжения;
Фиг. 19 является схемой, иллюстрирующей примеры векторов напряжения, когда крутящий момент команды управления крутящим моментом выводится из электромотора в первом шаблоне переключения и квадратно–волновом импульсном шаблоне;
Фиг. 20 является блок–схемой последовательности операций способа, иллюстрирующей пример обработки переключения между вторым шаблоном переключения и первым шаблоном переключения, выполняемой посредством электронного модуля управления согласно второму варианту осуществления;
Фиг. 21 является схемой, иллюстрирующей второй шаблон переключения и первый шаблон переключения вместе с ширинами зазоров и коротких импульсов;
Фиг. 22 является блок–схемой последовательности операций способа, иллюстрирующей пример обработки переключения импульсного шаблона в модифицированном примере;
Фиг. 23 является схемой, иллюстрирующей карту задания степеней модуляции; и
Фиг. 24 является схемой, иллюстрирующей пример карты задания времени.
Подробное описание вариантов осуществления изобретения
В дальнейшем в этом документе, описываются аспекты для реализации настоящего изобретения со ссылкой на варианты осуществления.
Фиг. 1 является схемой, принципиально иллюстрирующей конфигурацию электротранспортного средства 20, на котором монтируется устройство управления электромотором согласно первому варианту осуществления в настоящем изобретении. Как проиллюстрировано на фиг. 1, электротранспортное средство 20 согласно первому варианту осуществления включает в себя электромотор 32, инвертор 34, аккумулятор 36 в качестве источника мощности, повышающий преобразователь 40 и электронный модуль 50 управления. Электронный модуль 50 управления используется в качестве устройства управления электромотором.
Электромотор 32 состоит из синхронного генерирующего электромотора и включает в себя ротор, в который встраивается постоянный магнит, и статор, вокруг которого наматывается трехфазная катушка. Ротор электромотора 32 соединяется с ведущим валом 26, который сцепляется с ведущими колесами 22a, 22b через дифференциальную шестерню 24.
Инвертор 34 используется для того, чтобы приводить в действие электромотор 32. Инвертор 34 соединяется с повышающим преобразователем 40 через линию 42 подачи мощности на стороне высокого напряжения и включает в себя шесть транзисторов T11–T16 в качестве переключающих элементов и шесть диодов D11–D16, соответственно, соединенных параллельно с шестью транзисторами T11–T16. Транзисторы T11–T16 размещаются в парах, соответственно, таким образом, что они представляют собой источник и приемник относительно линии на стороне положительного электрода и линии на стороне отрицательного электрода линии 42 подачи мощности на стороне высокого напряжения. Кроме того, точки соединения между транзисторами T11–T16, которые формируют пару, соответственно, соединяются с тремя фазными катушками (U–фазной, V–фазной и W–фазной катушками) электромотора 32. Следовательно, когда напряжение прикладывается к инвертору 34, электронный модуль 50 управления регулирует пропорцию времени включения транзисторов T11–T16, которые формируют пару таким образом, что вращающееся магнитное поле формируется в трехфазной катушке, и электромотор 32 вращательно приводится в действие. Сглаживающий конденсатор 46 присоединяется к линии на стороне положительного электрода и линии на стороне отрицательного электрода линии 42 подачи мощности на стороне высокого напряжения.
Аккумулятор 36 состоит, например, из литий–ионной аккумуляторной батареи или никель–гидридной аккумуляторной батареи и соединяется с повышающим преобразователем 40 через линию 44 подачи мощности на стороне низкого напряжения. Сглаживающий конденсатор 48 присоединяется к линии на стороне положительного электрода и линии на стороне отрицательного электрода линии 44 подачи мощности на стороне низкого напряжения.
Повышающий преобразователь 40 соединяется с линией 42 подачи мощности на стороне высокого напряжения и линией 44 подачи мощности на стороне низкого напряжения и включает в себя два транзистора T31, T32, два диода D31, D32, соответственно, соединенные параллельно с двумя транзисторами T31, T32, и реактор L. Транзистор T31 соединяется с линией на положительной стороне линии 42 подачи мощности на стороне высокого напряжения. Транзистор T32 соединяется с транзистором T31 и линией на отрицательной стороне линии 42 подачи мощности на стороне высокого напряжения и линии 44 подачи мощности на стороне низкого напряжения. Реактор L соединяется с точкой соединения между транзисторами T31, T32 и линией на стороне положительного электрода линии 44 подачи мощности на стороне низкого напряжения. По мере того, как электронный модуль 50 управления регулирует пропорцию времени включения транзисторов T31, T32, повышающий преобразователь 40 повышает напряжение линии 44 подачи мощности на стороне низкого напряжения и подает напряжение в линию 42 подачи мощности на стороне высокого напряжения или вызывает падение напряжения линии 42 подачи мощности на стороне высокого напряжения и подает напряжение в линию 44 подачи мощности на стороне низкого напряжения.
Электронный модуль 50 управления состоит из микропроцессора, имеющего CPU 52 в качестве основного компонента, и включает в себя ROM 54, которое сохраняет программу обработки, RAM 56, которое временно сохраняет данные, и порты ввода–вывода, в дополнение к CPU 52. Сигналы из различных датчиков вводятся в электронный модуль 50 управления через входной порт. Примеры сигнала, вводимого в электронный модуль 50 управления, могут включать в себя позицию θm вращения из датчика 32a обнаружения позиций вращения (например, кругового датчика позиции), которая определяет позицию вращения ротора электромотора 32, фазные токи Iu, Iv из датчиков 32u, 32v тока, которые определяют фазный ток каждой фазы электромотора 32, напряжение Vb из датчика 36a напряжения, присоединяемого между контактными выводами аккумулятора 36, ток Ib из датчика 36b тока, присоединяемого к выходному контактному выводу аккумулятора 36, ток IL из датчика 40a тока, присоединяемого последовательно к реактору L, напряжение VH конденсатора 46 (линии 42 подачи мощности на стороне высокого напряжения) из датчика 46a напряжения, присоединяемого между контактными выводами конденсатора 46, напряжение VL конденсатора 48 (линии 44 подачи мощности на стороне низкого напряжения) из датчика 48a напряжения, присоединяемого между контактными выводами конденсатора 48, сигнал зажигания из переключателя 60 зажигания, позицию SP переключения передач из датчика 62 позиции переключения передач, который обнаруживает рабочую позицию рычага 61 переключения передач, степень Acc открытия акселератора из датчика 64 позиции педали акселератора, который определяет величину нажатия педали 63 акселератора, позицию BP педали тормоза из датчика 66 позиции педали тормоза, который определяет величину нажатия педали 65 тормоза, и скорость V транспортного средства из датчика 68 скорости транспортного средства. Электронный модуль 50 управления вычисляет число Nm оборотов электромотора 32 на основе позиции θm вращения из датчика 32a обнаружения позиций вращения или состояния SOC заряда аккумулятора 36 на основе интегрированного значения тока Ib аккумулятора 36 из датчика 36b тока. Здесь, состояние SOC заряда является отношением величины мощности (разряжаемой величины мощности), накапливаемой в аккумуляторе 36, относительно общей емкости аккумулятора 36.
Различные управляющие сигналы выводятся из электронного модуля 50 управления через выходной порт. Примеры сигнала, выводимого из электронного модуля 50 управления, могут включать в себя сигнал управления переключением в транзисторы T11–T16 инвертора 34 и сигнал управления переключением в транзисторы T31, T32 повышающего преобразователя 40.
В электротранспортном средстве 20 согласно настоящему варианту осуществления, сконфигурированном вышеуказанным способом, электронный модуль 50 управления выполняет следующее управление движением. При управлении движением, требуемый крутящий момент Td*, требуемый для ведущего вала 26, задается на основе степени Acc открытия акселератора и скорости V транспортного средства, заданный требуемый крутящий момент Td* задается в качестве команды Tm* управления крутящим моментом электромотора 32, и управление переключением транзисторов T11–T16 инвертора 34 выполняется таким образом, что электромотор 32 может приводиться в действие посредством команды Tm* управления крутящим моментом. Дополнительно, при управлении движением, целевое напряжение VH* линии 42 подачи мощности на стороне высокого напряжения задается таким образом, что электромотор 32 может приводиться в действие посредством команды Tm* управления крутящим моментом, и управление переключателем транзисторов T31, T32 повышающего преобразователя 40 выполняется таким образом, что напряжение VH линии 42 подачи мощности на стороне высокого напряжения может достигать целевого напряжения VH*.
Далее описывается управление в устройстве управления, смонтированном на электротранспортном средстве 20 согласно первому варианту осуществления, в частности, управление переключением переключающего элемента инвертора 34. Фиг. 2 является блок–схемой последовательности операций способа, иллюстрирующей пример обработки задания режима управления, выполняемой посредством электронного модуля 50 управления. Обработка многократно выполняется в каждое заданное время.
Когда обработка задания режима управления выполняется, электронный модуль 50 управления сначала выполняет обработку ввода числа Nm оборотов электромотора 32 и степени M модуляции (этап S100). В качестве числа Nm оборотов электромотора 32, может вводиться значение, вычисленное на основе позиции θm вращения из датчика 32a обнаружения позиций вращения. Степень M модуляции может получаться посредством деления квадратного корня суммы квадратов компонента Vd d–оси и компонента Vq q–оси в векторе напряжения на напряжение VH линии 42 подачи мощности высокого напряжения.
Затем, входное число Nm оборотов электромотора 32 сравнивается с пороговым значением Nref1 и пороговым значением Nref2 (этап S110). Ниже описываются подробности порогового значения Nref1 и порогового значения Nref2. Когда число Nm оборотов электромотора 32 меньше порогового значения Nref1, значение Mset1 задается равным пороговому значению Mref2 (этап S120). Когда число Nm оборотов электромотора 32 превышает или равно пороговому значению Nref1 и меньше порогового значения Nref2, значение Mset2 задается равным пороговому значению Mref2 (этап S130). Когда число Nm оборотов электромотора 32 превышает или равно пороговому значению Nref2, значение Mset3 задается равным пороговому значению Mref2 (этап S140). Ниже описываются пороговое значение Mref2, значение Mset1, значение Mset2 и значение Mset3.
Затем, степень M модуляции сравнивается с пороговым значением Mref1 и пороговым значением Mref2 (этап S150). Когда определяется то, что степень M модуляции меньше порогового значения Mref1, задается режим PWM–управления (этап S160). Когда определяется то, что степень M модуляции превышает или равна пороговому значению Mref1 и меньше порогового значения Mref2, задается промежуточный режим управления (этап S170). Когда определяется то, что степень M модуляции превышает или равна пороговому значению Mref2, задается квадратно–волновой режим управления (этап S180). После этого обработка завершается. Пороговое значение Mref1 представляет собой степень модуляции, которая отличает режим управления с широтно–импульсной модуляцией (в дальнейшем в этом документе, называемый "режимом PWM–управления") от промежуточного режима управления. Пороговое значение Mref2 представляет собой степень модуляции, которая отличает промежуточный режим управления из квадратно–волнового режима управления. Режим PWM–управления управляет инвертором 34 таким образом, что псевдотрехфазное напряжение переменного тока прикладывается (подается) в электромотор 32. Квадратно–волновой режим управления управляет инвертором 34 таким образом, что квадратно–волновое напряжение прикладывается к электромотору 32. Промежуточный режим управления управляет инвертором 34 таким образом, что напряжение импульсного шаблона, в котором зазор или короткий импульс формируется в импульсном шаблоне в квадратно–волновом режиме управления во время перехода через нуль, когда фазный ток переходит через нуль, может прикладываться к электромотору 32. Ниже описываются подробности промежуточного режима управления. Фиг. 3 иллюстрирует пример взаимосвязи между числом Nm оборотов электромотора 32, крутящим моментом Tm и режимом управления. На чертеже, нижняя левая область представляет режим PWM–управления, область со штриховкой представляет промежуточный режим управления, и верхняя правая область представляет квадратно–волновой режим управления.
Управление в режиме PWM–управления использует импульсный шаблон, сформированный посредством известной широтно–импульсной модуляции. Поскольку режим PWM–управления не составляет основу настоящего изобретения, его подробное описание опускается. Кроме того, для удобства описания, сначала описывается импульсный шаблон в квадратно–волновом режиме управления, а затем описывается импульсный шаблон в промежуточном режиме управления.
В устройстве управления, смонтированном на электротранспортном средстве 20 согласно первому варианту осуществления, квадратно–волновой режим управления управляет инвертором 34 посредством трех импульсных шаблонов, которые представляют собой первый шаблон переключения, второй шаблон переключения и квадратно–волновой импульсный шаблон. Фиг. 4 является блок–схемой последовательности операций способа, иллюстрирующей пример обработки задания импульсного шаблона в квадратно–волновом режиме, выполняемой посредством электронного модуля 50 управления. При обработке задания импульсного шаблона в квадратно–волновом режиме управления, во–первых, вводится число Nm оборотов электромотора 32 (этап S200), и входное число Nm оборотов электромотора 32 сравнивается с пороговым значением Nref1 и пороговым значением Nref2 (этап S210). Пороговое значение Nref2 составляет число оборотов, большее верхнего предельного значения первой резонансной области, полученного посредством преобразования, в число оборотов электромотора 32, области, в которой LC–резонанс возникает вследствие шестой электрической частоты флуктуации электромотора 32. Помимо этого, пороговое значение Nref1 составляет число оборотов, меньшее нижнего предельного значения первой резонансной области и большее верхнего предельного значения второй резонансной области, полученного посредством преобразования, в число оборотов электромотора 32, области, в которой LC–резонанс возникает вследствие двенадцатой электрической частоты флуктуации электромотора 32. Когда определяется то, что число Nm оборотов электромотора 32 меньше порогового значения Nref1, задается второй шаблон переключения (этап S220). Когда определяется то, что число Nm оборотов электромотора 32 превышает или равно пороговому значению Nref1 и меньше порогового значения Nref2, задается первый шаблон переключения (этап S230). Когда определяется то, что число Nm оборотов электромотора 32 превышает или равно пороговому значению Nref2, задается квадратно–волновой импульсный шаблон (этап S240). После этого обработка завершается.
Фиг. 5 является схемой, иллюстрирующей пример квадратно–волнового импульсного шаблона, первого шаблона переключения и второго шаблона переключения. Как проиллюстрировано на чертеже, квадратно–волновой импульсный шаблон представляет собой импульсный шаблон (импульсный шаблон при нормальном квадратно–волновом управлении), в котором вся первая половина одного периода от времени T1 до T2 становится одним импульсом (квадратно–волновым импульсом), и импульс не формируется во второй половине периода. В первом шаблоне переключения, один зазор формируется в области, в которой квадратно–волновой импульс квадратно–волнового импульсного шаблона в первой половине одного периода T1 в T2 присутствует, один короткий импульс формируется одновременно с тем, когда формируется зазор во второй половине периода, и компонент шестой электрической частоты флуктуации задается большим. Как проиллюстрировано на чертеже, в качестве шаблона переключения, в котором компонент шестой электрической частоты флуктуации задается большим, импульсный шаблон, имеющий четыре или более импульсов в один период, а также импульсный шаблон, имеющий три импульса в один период, является эффективным. Тем не менее, в первом варианте осуществления, импульсный шаблон, имеющий наименьшее число импульсов в один период, используется в качестве первого шаблона переключения. Второй шаблон переключения представляет собой импульсный шаблон, в котором зазор (в сумме два зазора) и один короткий импульс (в сумме два коротких импульса) дополнительно формируются в первом шаблоне переключения, и двенадцатый электрический компонент флуктуации задается большим в дополнение к компоненту шестой электрической частоты флуктуации. Как проиллюстрировано фиг. 5, в качестве шаблона переключения, в котором компонент двенадцатой электрической частоты флуктуации задается большим, в дополнение к компоненту шестой электрической частоты флуктуации, импульсный шаблон, имеющий пять или более импульсов в один период, а также импульсный шаблон, имеющий четыре импульса в один период, является эффективным. Тем не менее, в первом варианте осуществления, шаблон, имеющий наименьшее число импульсов в один период, используется в качестве второго шаблона переключения. Кроме того, в квадратно–волновом режиме управления в верхней правой области на фиг. 3, области, разделенные посредством порогового значения Nref1 и порогового значения Nref2, в порядке слева, представляют второй шаблон переключения, первый шаблон переключения и квадратно–волновой импульсный шаблон, соответственно.
Как описано выше, при обработке задания импульсного шаблона в квадратно–волновом режиме управления, на этапе S210, когда определяется то, что число Nm оборотов электромотора 32 меньше порогового значения Nref1, второй шаблон переключения задается таким образом, чтобы ограничивать LC–резонанс вследствие двенадцатой электрической частоты флуктуации электромотора 32. Когда определяется то, что число Nm оборотов электромотора 32 превышает или равно пороговому значению Nref1 и меньше порогового значения Nref2, первый шаблон переключения задается таким образом, чтобы ограничивать LC–резонанс вследствие шестой электрической частоты флуктуации. Когда определяется то, что число Nm оборотов электромотора 32 превышает или равно пороговому значению Nref2, квадратно–волновой импульсный шаблон задается, поскольку не возникает LC–резонанс. В связи с этим, можно ограничивать вибрацию, которая может возникать вследствие LC–резонанса, вызываемого посредством шестой электрической частоты флуктуации или двенадцатой электрической частоты флуктуации.
Здесь описывается смысл значения Mset1, значения Mset2 и значения Mset3, заданных в качестве порогового значения Mref2 на этапах S110–S140 на фиг. 2. В квадратно–волновом режиме управления, значение Mset1 представляет собой степень модуляции, когда используется второй шаблон переключения (значение 0,75 в первом варианте осуществления). Значение Mset2 представляет собой степень модуляции, когда используется первый шаблон переключения, и больше значения Mset1 (значение 0,756 в первом варианте осуществления). Значение Mset3 представляет собой степень модуляции, когда используется квадратно–волновой импульсный шаблон, и больше значения Mset2 (значения 0,78 в первом варианте осуществления). Как проиллюстрировано на фиг. 3, степень модуляции в квадратно–волновом режиме управления используется в качестве порогового значения Mref2, которое составляет верхнее предельное значение степени M модуляции в промежуточном режиме управления. Таким образом, в случае если число Nm оборотов электромотора 32 меньше порогового значения Nref1, Mref2 становится степенью модуляции (значением Mset1), когда используется второй шаблон переключения. В случае если число Nm оборотов электромотора 32 превышает или равно пороговому значению Nref1 и меньше порогового значения Nref2, Mref2 становится степенью модуляции (значением Mset2), когда используется первый шаблон переключения. В случае если число Nm оборотов электромотора 32 превышает или равно Nref2, Mref2 становится степенью модуляции (значением Mset3), когда используется квадратно–волновой импульсный шаблон. При обработке этапов S110–S140 при обработке задания режима управления на фиг. 2, пороговое значение Mref2 задается с учетом вышеприведенных ситуаций.
Далее описывается импульсный шаблон в промежуточном режиме управления. Фиг. 6 является блок–схемой последовательности операций способа, иллюстрирующей пример обработки задания импульсного шаблона в промежуточном режиме управления, выполняемой посредством электронного модуля 50 управления. При обработке задания импульсного шаблона в промежуточном режиме управления, во–первых, вводится число Nm оборотов электромотора 32 (этап S300), и входное число Nm оборотов электромотора 32 сравнивается с пороговым значением Nref1 и пороговым значением Nref2 (этап S310). Когда определяется то, что число Nm оборотов электромотора 32 меньше порогового значения Nref1, задается промежуточный второй шаблон переключения (этап S320). Когда определяется то, что число Nm оборотов электромотора 32 превышает или равно пороговому значению Nref1 и меньше порогового значения Nref2, задается промежуточный первый шаблон переключения (этап S330). Когда определяется то, что число Nm оборотов электромотора 32 превышает или равно пороговому значению Nref2, задается промежуточный квадратно–волновой импульсный шаблон (этап S340). Примеры промежуточного квадратно–волнового импульсного шаблона, промежуточного первого шаблона переключения и промежуточного второго шаблона переключения проиллюстрированы на фиг. 7. В квадратно–волновом импульсном шаблоне (см. фиг. 5), промежуточный квадратно–волновой импульсный шаблон представляет собой импульсный шаблон, в котором зазор формируется в квадратно–волновом импульсе во время T1(1) перехода через нуль, когда фазный ток переходит через значение нуль в первой половине одного периода от времен T1 до T2, и короткий импульс, имеющий ширину, идентичную ширине зазора, формируется во время T1(2) перехода через нуль во второй половине периода. Другими словами, относительно квадратно–волнового импульсного шаблона, промежуточный квадратно–волновой импульсный шаблон становится шаблоном переключения, в котором зазор формируется в случае, если импульс присутствует в то время, когда фазный ток переходит через значение нуль, и короткий импульс, имеющий ширину, идентичную ширине зазора, формируется в случае, если импульс не присутствует в это время. Аналогично промежуточному квадратно–волновому импульсному шаблону, относительно первого шаблона переключения и второго шаблона переключения (см. фиг. 5), промежуточный первый шаблон переключения и промежуточный второй шаблон переключения представляют собой импульсные шаблоны, в каждом из которых зазор формируется в квадратно–волновом импульсе во время T1(1) перехода через нуль в первой половине периода, и короткий импульс, имеющий ширину, идентичную ширине зазора, формируется во время T1(2) перехода через нуль во второй половине периода. Другими словами, относительно первого шаблона переключения и второго шаблона переключения, промежуточный первый шаблон переключения и промежуточный второй шаблон переключения становятся шаблонами переключения, в каждом из которых зазор формируется в случае, если импульс присутствует в то время, когда фазный ток переходит через значение нуль, и короткий импульс, имеющий ширину, идентичную ширине зазора, формируется в случае, если импульс не присутствует в это время. Помимо этого, в промежуточном режиме управления, который представляет собой область со штриховкой на фиг. 3, области, разделенные посредством порогового значения Nref1 и порогового значения Nref2, в порядке слева, представляют промежуточный второй шаблон переключения, промежуточный первый шаблон переключения и промежуточный квадратно–волновой импульсный шаблон, соответственно.
Затем ширина p зазора задается на основе степени M модуляции (этап S350), и обработка завершается. Как описано выше, поскольку короткий импульс и зазор имеют идентичную ширину, задание ширины p зазора на этапе S350 означает задание ширины p короткого импульса. В настоящем варианте осуществления, взаимосвязь между шириной импульса p и степенью M модуляции, полученная посредством экспериментов и т.п., сохраняется заранее в качестве карты задания ширин зазоров таким образом, что степень M модуляции изменяется с порогового значения Mref1 на пороговое значение Mref2 в каждом импульсном шаблоне, и ширина p зазора задается посредством извлечения соответствующей ширины зазора из карты, когда степень M модуляции задается. Пример карты задания ширин зазоров проиллюстрирован на фиг. 8. Как проиллюстрировано на чертеже, ширина p зазора снижается по мере того, как степень M модуляции увеличивается, и становится нулевой, когда степень M модуляции достигает порогового значения Mref2. Другими словами, поскольку промежуточный режим управления переключается на квадратно–волновой режим управления, когда степень M модуляции достигает порогового значения Mref2, промежуточный квадратно–волновой импульсный шаблон, промежуточный первый шаблон переключения и промежуточный второй шаблон переключения переключаются на квадратно–волновой импульсный шаблон, первый шаблон переключения и второй шаблон переключения. Здесь, ширина p зазора постепенно уменьшается и становится значением нуль по мере того, как степень M модуляции увеличивается, и в силу этого флуктуация крутящего момента не возникает, когда промежуточный режим управления переключается на квадратно–волновой режим управления. Помимо этого, считается, что зазор или короткий импульс формируется в то время, когда фазный ток переходит через нуль, чтобы уменьшать влияние фазного тока на форму сигнала.
В устройстве управления, смонтированном на электротранспортном средстве 20 согласно первому варианту осуществления, описанному выше, когда степень M модуляции превышает или равна пороговому значению Mref1 и меньше порогового значения Mref2 в промежуточном режиме управления, задается шаблон переключения, в котором, в импульсном шаблоне в квадратно–волновом режиме управления, зазор формируется в случае, если импульс присутствует в то время, когда фазный ток переходит через значение нуль, и короткий импульс, имеющий ширину, идентичную ширине зазора, формируется в случае, если импульс не присутствует в это время. После этого, ширина p зазора (ширина p короткого импульса) задается с использованием карты задания ширин зазоров, на которой ширина p зазора постепенно уменьшается по мере того, как степень M модуляции увеличивается, и становится значением нуль, когда степень M модуляции достигает Mref2. Затем управление переключением переключающего элемента инвертора выполняется посредством полученного шаблона переключения. В связи с этим, поскольку степень M модуляции постепенно изменяется с порогового значения Mref1 на пороговое значение Mref2, можно ограничивать вибрацию вследствие флуктуации крутящего момента, вызываемую посредством внезапного изменения степени M модуляции.
Помимо этого в устройстве управления, смонтированном на электротранспортном средстве 20 согласно первому варианту осуществления, в промежуточном режиме управления, в области, в которой число Nm оборотов электромотора 32 превышает или равно пороговому значению Nref1 и меньше порогового значения Nref2, и LC–резонанс вследствие шестой электрической частоты флуктуации электромотора 32 может возникать, задается промежуточный первый шаблон переключения, в котором зазор формируется в случае, если импульс присутствует в то время, когда фазный ток переходит через значение нуль, и короткий импульс, имеющий ширину, идентичную ширине зазора, формируется в случае, если импульс не присутствует в это время относительно первого шаблона переключения, в котором шестая электрическая частота флуктуации задается большей. В связи с этим, можно ограничивать вибрацию, которая может возникать вследствие LC–резонанса, вызываемого посредством шестой электрической частоты флуктуации. Кроме того, в промежуточном режиме управления, в области, в которой число Nm оборотов электромотора 32 меньше порогового значения Nref1, и LC–резонанс вследствие двенадцатой электрической частоты флуктуации электромотора 32 может возникать, задается промежуточный первый шаблон переключения, в котором зазор формируется в случае, если импульс присутствует в то время, когда фазный ток переходит через значение нуль, и короткий импульс, имеющий ширину, идентичную ширине зазора, формируется в случае, если импульс не присутствует в это время относительно второго шаблона переключения, в котором двенадцатая электрическая частота флуктуации задается большей, как и шестая электрическая частота флуктуации. В связи с этим, можно ограничивать вибрацию, которая может возникать вследствие LC–резонанса, вызываемого посредством двенадцатой электрической частоты флуктуации.
В устройстве управления, смонтированном на электротранспортном средстве 20 согласно первому варианту осуществления, промежуточный режим управления имеет промежуточный второй шаблон переключения, промежуточный первый шаблон переключения и промежуточный квадратно–волновой импульсный шаблон. Тем не менее, как проиллюстрировано во взаимосвязи между числом Nm оборотов электромотора 32, крутящим моментом Tm и режимом управления модифицированного примера на фиг. 9, промежуточный режим управления может иметь промежуточный второй шаблон переключения и промежуточный первый шаблон переключения, но не должен иметь промежуточный квадратно–волновой импульсный шаблон. Как описано выше, в промежуточном режиме управления, с учетом того, что возникновение LC–резонанса вследствие шестой электрической частоты флуктуации или двенадцатой электрической частоты флуктуации ограничивается, промежуточный режим управления может иметь область вплоть до порогового значения Nref2, которое превышает верхнее предельное значение области, в которой возникает LC–резонанс вследствие шестой электрической частоты флуктуации. В этом случае, обработка задания режима управления на фиг. 10 выполняется вместо обработки задания режима управления на фиг. 2, и импульсный шаблон в промежуточном режиме управления на фиг. 11 выполняется вместо обработки задания импульсного шаблона в промежуточном режиме управления на фиг. 6.
При обработке задания режима управления на фиг. 10, вводятся число Nm оборотов электромотора 32 и степень M модуляции (этап S100), и определяется то, превышает или равно либо нет число Nm оборотов электромотора 32 пороговому значению Nref1 (этап S110B). Когда определяется то, что число Nm оборотов электромотора 32 меньше порогового значения Nref1, значение Mset1 задается равным пороговому значению Mref2 (этап S120). Когда определяется то, что число Nm оборотов электромотора 32 превышает или равно пороговому значению Nref1, значение Mset2 задается равным пороговому значению Mref2 (этап S130). Затем степень M модуляции сравнивается с пороговым значением Mref1 и пороговым значением Mref2 (этап S150). Когда определяется то, что степень M модуляции меньше порогового значения Mref1, задается режим PWM–управления (этап S160). Когда определяется то, что степень M модуляции превышает или равна пороговому значению Mref1 и меньше порогового значения Mref2, задается промежуточный режим управления (этап S170). Когда определяется то, что степень M модуляции превышает или равна пороговому значению Mref2, задается квадратно–волновой режим управления (этап S180). После этого обработка завершается. Другими словами, выполняется обработка, при которой этап S140 удаляется из обработки задания режима управления на фиг. 2.
При обработке задания импульсного шаблона в промежуточном режиме управления на фиг. 11, вводится число Nm оборотов электромотора 32 (этап S300), и определяется то, превышает или равно либо нет число Nm оборотов электромотора 32 пороговому значению Nref1 (этап S310B). Когда определяется то, что число Nm оборотов электромотора 32 меньше порогового значения Nref1, задается промежуточный второй шаблон переключения (этап S320). Когда определяется то, что число Nm оборотов электромотора 32 превышает или равно пороговому значению Nref1, задается промежуточный первый шаблон переключения (этап S330). Затем ширина p зазора задается на основе степени M модуляции (этап S350), и обработка завершается. Другими словами, выполняется обработка, при которой этап S340 удаляется из обработки задания режима управления на фиг. 6.
Даже устройство управления, смонтированное на электротранспортном средстве модифицированного примера, может иметь преимущество, идентичное преимуществу, достигаемому посредством устройства управления, смонтированному на электротранспортном средстве 20 согласно первому варианту осуществления.
Дополнительно, аналогично взаимосвязи между числом Nm оборотов электромотора 32, крутящим моментом Tm и режимом управления модифицированного примера, проиллюстрированного на фиг. 12 и 13, квадратно–волновой режим управления может иметь квадратно–волновой импульсный шаблон и первый шаблон переключения, но не должен иметь второй шаблон переключения. В этом случае, в качестве обработки задания режима управления, выполняется обработка, при которой этап S110 в обработке задания режима управления на фиг. 2 изменяется на обработку определения того, превышает или равно либо нет число Nm оборотов электромотора 32 пороговому значению Nref2, и этап S120 удаляется, либо при которой этапы S110B и S120 в обработке задания режима управления на фиг. 10 удаляются. Кроме того, в качестве обработки задания импульсного шаблона в промежуточном режиме управления, выполняется обработка, при которой этап S310 в обработке задания импульсного шаблона в промежуточном режиме управления на фиг. 6 изменяется на обработку определения того, превышает или равно либо нет число Nm оборотов электромотора 32 пороговому значению Nref2, и этап S320 удаляется, либо при которой этапы S310B и S320 в обработке задания импульсного шаблона в промежуточном режиме управления на фиг. 11 удаляются. В этом случае, также можно ограничивать вибрацию вследствие флуктуации крутящего момента, вызываемую посредством внезапного изменения степени M модуляции, и вибрацию, которая может возникать вследствие LC–резонанса, вызываемого посредством шестой электрической частоты флуктуации.
Кроме того, аналогично взаимосвязи между числом Nm оборотов электромотора 32, крутящим моментом Tm и режимом управления модифицированного примера, проиллюстрированного на фиг. 14, квадратно–волновой режим управления может иметь только квадратно–волновой импульсный шаблон. В этом случае, аналогично обработке задания режима управления, выполняется обработка, при которой этапы S110–S140 при обработке задания режима управления на фиг. 2 удаляются, и аналогично обработке задания импульсного шаблона в промежуточном режиме управления, выполняется обработка, при которой этапы S310–S330 при обработке задания импульсного шаблона в промежуточном режиме управления на фиг. 6 удаляются. В этом случае, также можно ограничивать вибрацию вследствие флуктуации крутящего момента, вызываемую посредством внезапного изменения степени M модуляции.
Далее описывается устройство управления, смонтированное на электротранспортном средстве 120 согласно второму варианту осуществления. Электротранспортное средство 120 согласно второму варианту осуществления имеет конфигурацию, идентичную конфигурации электротранспортного средства 20, согласно первому варианту осуществления, проиллюстрированному на фиг. 1. Следовательно, во избежание перекрывающегося описания, конфигурация электротранспортного средства 120 согласно второму варианту осуществления обозначается посредством ссылки с номером, идентичной ссылке с номером для конфигурации электротранспортного средства 20 согласно первому варианту осуществления, осуществления, проиллюстрированному на фиг. 1, и ее описание опускается. Аналогично электротранспортному средству 20 согласно первому варианту осуществления, устройство управления, смонтированное на электротранспортном средстве 120 согласно второму варианту осуществления, также имеет режим PWM–управления, промежуточный режим управления и квадратно–волновой режим управления, как проиллюстрировано во взаимосвязи между числом Nm оборотов электромотора 32, крутящим моментом Tm и режимом управления на фиг. 2. Следовательно, выполняется обработка задания режима управления на фиг. 2. Помимо этого, аналогично электротранспортному средству 20 согласно первому варианту осуществления, в устройстве управления, смонтированном на электротранспортном средстве 120 согласно второму варианту осуществления, в квадратно–волновом режиме управления, второй шаблон переключения используется, когда число Nm оборотов электромотора 32 меньше порогового значения Nref1, первый шаблон переключения используется, когда число Nm оборотов электромотора 32 превышает или равно пороговому значению Nref1 и меньше порогового значения Nref2, и квадратно–волновой импульсный шаблон используется, когда число Nm оборотов электромотора 32 превышает или равно пороговому значению Nref2. Другими словами, также выполняется обработка задания импульсного шаблона в квадратно–волновом режиме управления на фиг. 4. Дополнительно, аналогично электротранспортному средству 20 согласно первому варианту осуществления, в устройстве управления, смонтированном на электротранспортном средстве 120 согласно второму варианту осуществления, в промежуточном режиме управления, промежуточный второй шаблон переключения используется, когда число Nm оборотов электромотора 32 меньше порогового значения Nref1, промежуточный первый шаблон переключения используется, когда число Nm оборотов электромотора 32 превышает или равно пороговому значению Nref1 и меньше порогового значения Nref2, и промежуточный квадратно–волновой импульсный шаблон используется, когда число Nm оборотов электромотора 32 превышает или равно пороговому значению Nref2. Следовательно, также выполняется обработка задания импульсного шаблона в промежуточном режиме управления на фиг. 6.
Далее описывается управление в устройстве управления, смонтированном на электротранспортном средстве 120 согласно второму варианту осуществления, в частности, управление при переключении с первого шаблона переключения на квадратно–волновой импульсный шаблон и управление при переключении со второго шаблона переключения на первый шаблон переключения. Фиг. 15 является блок–схемой последовательности операций способа, иллюстрирующей пример обработки переключения между первым шаблоном переключения и квадратно–волновым импульсным шаблоном, выполняемой посредством электронного модуля 50 управления электротранспортного средства 120 согласно второму варианту осуществления при переключении с первого шаблона переключения на квадратно–волновой импульсный шаблон.
При обработке переключения между первым шаблоном переключения и квадратно–волновым импульсным шаблоном, во–первых, вводятся число Nm оборотов электромотора 32, напряжение VH линии 42 подачи мощности высокого напряжения из датчика 46a напряжения, команда Tm* управления крутящим моментом электромотора 32 и т.п. (этап S400), и счетчик C инициализируется равным значению нуль (этап S410). В качестве числа Nm оборотов электромотора 32, может вводиться значение, вычисленное на основе позиции θm вращения из датчика 32a обнаружения позиций вращения. Команда Tm* управления крутящим моментом, заданная посредством управления движением, может вводиться. Счетчик C используется в качестве счетчика в настоящей обработке.
Затем, обработка на этапах S420–S460 повторяется до тех пор, пока счетчик C не достигает порогового значения Cref1. Пороговое значение Cref1 имеет число шагов, за которые степень M модуляции изменяется пошагово. В повторной обработке, во–первых, счетчик C постепенно увеличивается на значение 1 (этап S420), и степень M модуляции задается посредством нижеприведенного уравнения (1) (этап S430). Как выражается в уравнении (1), степень M модуляции вычисляется посредством вычитания порогового значения Mset2 из порогового значения Mset3, деления результата на пороговое значение Cref1 и его умножения на значение счетчика C и суммирования порогового значения Mref2 с означенным. Другими словами, степень M модуляции вычисляется посредством определения величины изменения за один шаг посредством пропорционального выделения разности между пороговым значением Mset3 и пороговым значением Mset2 посредством порогового значения Cref1, которое составляет число повторений, и изменения порогового значения Mset2 на величину изменения согласно значению счетчика C (числу шагов). Короткий импульс имеет ширину, идентичную ширине зазора
M=Mset2+C*(Mset3–Mset2)/Cref1 (1)
Затем, ширина p1 зазора в первом шаблоне переключения задается на основе степени M модуляции (этап S440). Как описано выше, поскольку зазор и короткий импульс имеет идентичную ширину в первом шаблоне переключения, задание ширины p1 зазора означает задание ширины p1 короткого импульса. Фиг. 16 иллюстрирует квадратно–волновой импульсный шаблон и первый шаблон переключения вместе с ширинами p1 зазоров и коротких импульсов. Во втором варианте осуществления, ширина p1 зазора задается посредством проверки заранее взаимосвязи между шириной p1 зазора и степенью M модуляции, сохранения взаимосвязи в качестве карты задания ширин зазоров при переключении и извлечения соответствующей ширины p1 зазора из карты, когда степень M модуляции задается. Пример карты задания ширин зазоров при переключении проиллюстрирован на фиг. 17. Фиг. 17 также иллюстрирует карту задания ширин зазоров при переключении ширин p1, p2 двух зазоров при переключении со второго шаблона переключения на первый шаблон переключения. На карте задания ширин зазоров при переключении, используемой при обработке переключения между первым шаблоном переключения и квадратно–волновым импульсным шаблоном, ширина p1 зазора представляется посредством p1 между пороговым значением Mset2 и пороговым значением Mset3 на фиг. 17. Ширина p1 зазора постепенно уменьшается со значения p1(1) при пороговом значении Mset2 по мере того, как степень M модуляции увеличивается с порогового значения Mset2, и становится равной 0, когда степень M модуляции достигает порогового значения Mset3. Дополнительно, поскольку степень M модуляции задается пошагово посредством счетчика C, ширина p1 зазора также задается пошагово.
Затем, фаза θ напряжения задается на основе угловой скорости ω, степени M модуляции, напряжения VH линии 42 подачи мощности высокого напряжения и команды Tm* управления крутящим моментом (этап S450). Угловая скорость ω может вычисляться из числа Nm оборотов электромотора 32. Взаимосвязь между фазой θ напряжения и крутящим моментом Tm электромотора 32 получается посредством нижеприведенного уравнения (2). В уравнении (2), V является значением, полученным посредством умножения напряжения VH на степень M модуляции, p является числом полюсных пар электромотора 32, ɸ является магнитным потоком, Ld является индуктивностью d–оси, и Lq является индуктивностью q–оси. Следовательно, когда угловая скорость ω, степень M модуляции, напряжение VH линии 42 подачи мощности высокого напряжения применяются к уравнению (2), взаимосвязь между крутящим моментом Tm и фазой θ напряжения может быть проиллюстрирована на чертеже. Пример взаимосвязи между крутящим моментом Tm и фазой θ напряжения проиллюстрирован на фиг. 18. На чертеже, кривая, показанная посредством сплошной линии, представляет взаимосвязь между крутящим моментом Tm и фазой θ напряжения в первом шаблоне переключения, и кривая посредством пунктирной линии представляет взаимосвязь между крутящим моментом Tm и фазой θ напряжения в квадратно–волновом импульсном шаблоне. Дополнительно, Tm* представляет команду управления крутящим моментом электромотора 32, θ1 представляет фазу напряжения, когда крутящий момент команды Tm* управления крутящим моментом выводится из электромотора 32 в первом шаблоне переключения, и θ2 представляет фазу напряжения, когда крутящий момент команды Tm* управления крутящим моментом выводится из электромотора 32 в квадратно–волновом импульсном шаблоне. Как проиллюстрировано на чертеже, множество (два на чертеже) фаз θ напряжения присутствуют в каждом шаблоне относительно команды Tm* управления крутящим моментом, но используется наименьшая фаза θ напряжения из них. Поскольку время переключения с первого шаблона переключения на квадратно–волновой импульсный шаблон рассматривается, взаимосвязь между крутящим моментом Tm и фазой θ напряжения представляет собой промежуточную кривую между двумя кривыми. Следовательно, фаза θ напряжения, которая должна получаться, составляет значение между θ1 и θ2. Фиг. 19 иллюстрирует векторы напряжения, когда крутящий момент команды Tm* управления крутящим моментом выводится из электромотора 32 в первом шаблоне переключения и квадратно–волновом импульсном шаблоне. На чертеже можно видеть, что для того, чтобы сделать задавать момент Tm электромотора 32 идентичным при переключении с первого шаблона переключения на квадратно–волновой импульсный шаблон, компонент Vq q–оси вектора напряжения должно становиться идентичным. Поскольку фаза θ напряжения, которая должна получаться, составляет значение между θ1 и θ2, вектор напряжения становится промежуточным вектором между двумя векторами на фиг. 19. Кроме того, при обработке этапа S450 согласно второму варианту осуществления, фаза θ напряжения задается посредством получения заранее наименьшей фазы θ напряжения относительно угловой скорости ω, степени M модуляции, напряжения VH линии подачи мощности на стороне высокого напряжения 42 и команды Tm* управления крутящим моментом, сохранения наименьшей фазы θ напряжения в качестве карты задания фазы напряжения и извлечения соответствующей фазы θ напряжения из карты, когда задаются угловая скорость ω, степень M модуляции, напряжение VH линии подачи мощности на стороне высокого напряжения 42 и команда Tm* управления крутящим моментом.
 (2)
(2)
Затем, определяется то, достигает или нет счетчик C порогового значения Cref1 (этап S460). Когда определяется то, что счетчик C не достигает порогового значения Cref1, обработка возвращается к этапу S420. Когда определяется то, что счетчик C достигает порогового значения Cref1, обработка завершается. Как описано выше, пороговое значение Cref1 имеет число шагов, за которые степень M модуляции изменяется пошагово, и определяется посредством времени, требуемого для повторения этапов S420–S460. Другими словами, пороговое значение Cref1 снижается, когда время, требуемое для выполнения этапов S420–S460, является большим, и увеличивается, когда время, требуемое для выполнения этапов S420–S460, является небольшим. Следовательно, поскольку число шагов, за которые изменяется степень M модуляции, может увеличиваться по мере того, как пороговое значение Cref1 увеличивается, можно плавно переключаться с первого шаблона переключения на квадратно–волновой импульсный шаблон.
Хотя обработка переключения между первым шаблоном переключения и квадратно–волновым импульсным шаблоном на фиг. 15 выполняется при переключении с первого шаблона переключения на квадратно–волновой импульсный шаблон, обработка также может выполняться при переключении с квадратно–волнового импульсного шаблона на первый шаблон переключения.
Фиг. 20 является блок–схемой последовательности операций способа, иллюстрирующей пример обработки переключения между вторым шаблоном переключения и первым шаблоном переключения, выполняемой посредством электронного модуля 50 управления электротранспортного средства 120 согласно второму варианту осуществления при переключении со второго шаблона переключения на первый шаблон переключения. При обработке переключения между вторым шаблоном переключения и первым шаблоном переключения, во–первых, вводятся число Nm оборотов электромотора 32, напряжение VH линии 42 подачи мощности высокого напряжения из датчика 46a напряжения, команда Tm* управления крутящим моментом электромотора 32 и т.п. (этап S500), и счетчик C инициализируется равным значению нуль (этап S510). Затем, обработка на этапах S520–S560 повторяется до тех пор, пока счетчик C не достигает порогового значения Cref2. Пороговое значение Cref2 имеет число шагов, за которые степень M модуляции изменяется в шагах.
В повторной обработке, во–первых, счетчик C постепенно увеличивается на значение 1 (этап S520), и степень M модуляции задается посредством нижеприведенного уравнения (3) (этап S530). Как выражается в уравнении (3), степень M модуляции вычисляется посредством вычитания порогового значения Mset1 из порогового значения Mset2, деления результата на пороговое значение Cref2 и его умножения на значение счетчика C и суммирования порогового значения Mref1 с означенным. Другими словами, степень M модуляции вычисляется посредством определения величины изменения за один шаг посредством пропорционального выделения разности между пороговым значением Mset2 и пороговым значением Mset1 посредством порогового значения Cref2, которое составляет число повторений, и изменения порогового значения Mset1 на величину изменения согласно значению счетчика C (числу шагов).
M=Mset1+C*(Mset2–Mset1)/Cref2 (3)
Затем, две ширины p1, p2 зазоров во втором шаблоне переключения задаются на основе степени M модуляции (этап S540). Как описано выше, поскольку два зазора в первом шаблоне переключения, соответственно, имеют ширины, идентичные ширинам двух коротких импульсов, задание ширин p1, p2 зазоров означает задание ширин p1, p2 коротких импульсов. Фиг. 21 иллюстрирует второй шаблон переключения и первый шаблон переключения вместе с ширинами p1, p2 зазоров и коротких импульсов. Во втором варианте осуществления, ширины p1, p2 зазоров задаются посредством проверки заранее взаимосвязи между ширинами p1 и p2 зазоров и степенью M модуляции, сохранения взаимосвязи в качестве карты задания ширин зазоров при переключении и извлечения соответствующих ширин p1, p2 зазоров из карты, когда степень M модуляции задается. На карте задания ширин зазоров при переключении, используемой для того, чтобы задавать ширины p1, p2 зазоров, ширины p1, p2 зазоров представляются посредством p1, p2 между пороговым значением Mset1 и пороговым значением Mset2 на фиг. 17. Ширина p1 зазора постепенно вплотную приближается к значению p1(1) при пороговом значении Mset2 от значения p1(2) при пороговом значении Mset1 по мере того, как степень M модуляции увеличивается с порогового значения Mset1, и становится значением p1(1), когда степень M модуляции достигает порогового значения Mset2. Ширина p2 зазора постепенно уменьшается со значения p2 (2) при пороговом значении Mset1 по мере того, как степень M модуляции увеличивается с порогового значения Mset1, и становится значением нуль, когда степень M модуляции достигает порогового значения Mset2. Дополнительно, поскольку степень M модуляции задается пошагово посредством счетчика C, ширины p1, p2 зазоров также задаются пошагово.
Затем, время tp1 зазора и короткого импульса (зазора и короткого импульса, имеющих ширину p1 зазора на фиг. 21), из числа двух зазоров и двух коротких импульсов во втором шаблоне переключения, соответствующих зазору и короткому импульсу в первом шаблоне переключения, задается посредством нижеприведенного уравнения (4) (этапа S545). В уравнении (4), tp1(2) является временем от начальной точки первой половины или второй половины периода зазора или короткого импульса, имеющего ширину p1 зазора во втором шаблоне переключения, и tp1(1) является временем от начальной точки первой половины или второй половины периода зазора или короткого импульса, имеющего ширину p1 зазора в первом шаблоне переключения. Как выражается в уравнении (4), время tp1 вычисляется посредством вычитания времени tp1(2) из времени tp1(1), деления результата на пороговое значение Cref2 и его умножения на значение счетчика C и суммирования времени tp1(2) с означенным. Другими словами, время tp1 вычисляется посредством определения величины изменения за один шаг посредством пропорционального выделения разности между временем tp1(1) и временем tp1(2) посредством порогового значения Cref2, которое составляет число повторений, и изменения времени tp1(2) на величину изменения согласно значению счетчика C (числу шагов). Время tp1(1) зазора или короткого импульса в первом шаблоне переключения немного отличается от времени tp1(2) соответствующего зазора или короткого импульса во втором шаблоне переключения, поскольку зазоры и короткие импульсы формируются и оптимизируются таким образом, что компонент двенадцатой электрической частоты флуктуации задается большим, в дополнение к частоте компонента шестой электрической частоты флуктуации. По идентичной причине, как описано выше, ширина p1(1) зазора или короткого импульса в первом шаблоне переключения немного отличается от ширины tp1(2) соответствующего зазора или короткого импульса во втором шаблоне переключения. Поскольку степень M модуляции задается пошагово посредством счетчика C, время tp1 также задается пошагово.
tp1=tp1(2)+C*(tp1(1)–tp1(2))/Cref2 (4)
Затем, аналогично этапу S450 обработки переключения между первым шаблоном переключения и квадратно–волновым импульсным шаблоном на фиг. 15, фаза напряжения θ задается на основе угловой скорости ω, степени M модуляции, напряжения VH линии 42 подачи мощности высокого напряжения и команды Tm* управления крутящим моментом (этап S550), и определяется то, достигает или нет счетчик C порогового значения Cref2 (этап S560). Когда определяется то, что счетчик C не достигает порогового значения Cref2, обработка возвращается к этапу S520. Когда определяется то, что счетчик C достигает порогового значения Cref2, обработка завершается. Как описано выше, пороговое значение Cref2 имеет число шагов, за которые степень M модуляции изменяется в шагах, и определяется посредством времени, требуемого для повторения этапов S520–S560. Другими словами, пороговое значение Cref2 снижается, когда время, требуемое для выполнения этапов S520–S560, является большим, и увеличивается, когда время, требуемое для выполнения этапов S520–S560, является небольшим. Следовательно, поскольку число шагов, за которые изменяется степень M модуляции, может увеличиваться по мере того, как пороговое значение Cref2 увеличивается, можно плавно переключаться со второго шаблона переключения на первый шаблон переключения.
Хотя обработка переключения между вторым шаблоном переключения и первым шаблоном переключения на фиг. 20 выполняется при переключении со второго шаблона переключения на первый шаблон переключения, обработка также может выполняться при переключении с первого шаблона переключения во второй шаблон переключения.
Посредством изменения первого шаблона переключения на промежуточный первый шаблон переключения и квадратно–волнового импульсного шаблона на промежуточный квадратно–волновой импульсный шаблон и применения обработки переключения между первым шаблоном переключения и квадратно–волновым импульсным шаблоном на фиг. 15, переключение с промежуточного первого шаблона переключения на промежуточный квадратно–волновой импульсный шаблон в промежуточном режиме управления может выполняться аналогично переключению с первого шаблона переключения на квадратно–волновой импульсный шаблон. Дополнительно, посредством изменения второго шаблона переключения на промежуточный второй шаблон переключения и первого шаблона переключения на промежуточный первый шаблон переключения и применения обработки переключения между первым шаблоном переключения и вторым шаблоном переключения на фиг. 20, переключение с промежуточного второго шаблона переключения на промежуточный первый шаблон переключения в промежуточном режиме управления может выполняться аналогично переключению со второго шаблона переключения на первый шаблон переключения.
В устройстве управления, смонтированном на электротранспортном средстве 120 согласно второму варианту осуществления, описанному выше, при переключении с первого шаблона переключения на квадратно–волновой импульсный шаблон в квадратно–волновом режиме управления, ширины p1 зазора и короткого импульса первого шаблона переключения постепенно изменяются таким образом, что они становятся небольшими. В связи с этим, можно ограничивать вибрацию вследствие флуктуации крутящего момента, возникающую вместе с внезапным изменением степени M модуляции, которое может возникать при переключении с первого шаблона переключения на квадратно–волновой импульсный шаблон. Кроме того, при переключении со второго шаблона переключения на первый шаблон переключения в квадратно–волновом режиме управления, ширины p1 зазора и короткого импульса, из числа двух зазоров и двух коротких импульсов во втором шаблоне переключения, соответствующих зазору и короткому импульсу в первом шаблоне переключения, постепенно изменяются таким образом, что они вплотную приближаются к ширине p1(1) зазора и короткого импульса в первом шаблоне переключения. Дополнительно, ширины p2 суммированного зазора и короткого импульса, из числа двух зазоров и двух коротких импульсов во втором шаблоне переключения, постепенно изменяются таким образом, что они становятся небольшими. В связи с этим, можно ограничивать вибрацию вследствие флуктуации крутящего момента, возникающую вместе с внезапным изменением степени M модуляции, которое может возникать при переключении со второго шаблона переключения на первый шаблон переключения.
Помимо этого, переключение с промежуточного первого шаблона переключения на промежуточный квадратно–волновой импульсный шаблон или переключение с промежуточного второго шаблона переключения на промежуточный первый шаблон переключения в промежуточном режиме управления также выполняются аналогично переключению с первого шаблона переключения на квадратно–волновой импульсный шаблон или переключению со второго шаблона переключения на первый шаблон переключения в квадратно–волновом режиме управления. В связи с этим, можно ограничивать вибрацию вследствие флуктуации крутящего момента, возникающую вместе с внезапным изменением степени M модуляции, которое может возникать при переключении с промежуточного первого шаблона переключения на промежуточный квадратно–волновой импульсный шаблон или переключении с промежуточного второго шаблона переключения на промежуточный первый шаблон переключения в промежуточном режиме управления.
В устройстве управления, смонтированном на электротранспортном средстве 120 согласно второму варианту осуществления, переключение с первого шаблона переключения на квадратно–волновой импульсный шаблон или переключение со второго шаблона переключения на первый шаблон переключения в квадратно–волновом режиме управления выполняется пошагово с использованием счетчика C. Тем не менее, ширины p1, p2 зазоров могут постепенно изменяться во время переключения без использования счетчика C. Например, обработка переключения импульсного шаблона на фиг. 22 может выполняться вместо обработки переключения между первым шаблоном переключения и квадратно–волновым импульсным шаблоном на фиг. 15 либо обработки переключения между вторым шаблоном переключения и первым шаблоном переключения на фиг. 22. Обработка переключения импульсного шаблона на фиг. 22 многократно выполняется в каждое заданное время (например, каждые несколько миллисекунд) в квадратно–волновом режиме управления.
При обработке переключения импульсного шаблона, во–первых, вводятся число Nm оборотов электромотора 32, напряжение VH линии 42 подачи мощности высокого напряжения из датчика 46a напряжения, команда Tm* управления крутящим моментом электромотора 32 и т.п. (этап S600), и степень M модуляции задается согласно числу Nm оборотов электромотора (этап S610). В настоящем модифицированном примере, степень M модуляции задается посредством определения заранее числа Nm оборотов электромотора 32 и степени M модуляции, сохранения определенного числа Nm оборотов электромотора 32 и степени M модуляции в качестве карты задания степеней модуляции и извлечения соответствующей степени M модуляции из карты, когда задается число Nm оборотов электромотора 32. Пример карты задания степеней модуляции проиллюстрирован на фиг. 23. Как показано на чертеже, степень M модуляции увеличивается с наклоном таким образом, что она плавно изменяется около порогового значения Nref1 и порогового значения Nref2. Другими словами, когда число Nm оборотов электромотора 32 увеличивается и вплотную приближается к пороговому значению Nref1, степень M модуляции увеличивается со значения Mset1 к значению Mset2 по мере того, как число Nm оборотов увеличивается, и когда число Nm оборотов электромотора 32 увеличивается и вплотную приближается к пороговому значению Nref2, степень M модуляции увеличивается со значения Mset2 к значению Mset3 по мере того, как число Nm оборотов увеличивается.
Затем, ширина p1 зазора первого шаблона переключения и две ширины p1, p2 зазоров второго шаблона переключения задаются на основе степени M модуляции (этап S620). Задание ширин p1, p2 зазоров является идентичным этапу S440 обработки переключения между первым шаблоном переключения и квадратным импульсным шаблоном на фиг. 15 и этапу S540 обработки переключения между вторым шаблоном переключения и первым шаблоном переключения на фиг. 20. Затем определяется то, представляет собой переключение импульсного шаблона или нет переключение со второго шаблона переключения на первый шаблон переключения (этап S630). Когда определяется то, что переключение выполняется со второго шаблона переключения на первый шаблон переключения, время tp1 зазора и короткого импульса, имеющих ширину p1, задается на основе степени M модуляции (этап S640). В настоящем модифицированном примере, время tp1 задается посредством определения заранее взаимосвязи между степенью M модуляции и временем tp1, сохранения взаимосвязи в качестве карты задания времени и извлечения соответствующего времени tp1 из карты, когда степень M модуляции задается. Пример карты задания времени проиллюстрирован на фиг. 24. В настоящем модифицированном примере, как показано на чертеже, по мере того, как степень M модуляции увеличивается, время tp1 задается таким образом, что оно приближается ко времени pt1 (1) из зазора и короткого импульса, имеющих ширину p1 зазора в первом шаблоне переключения, в котором степень M модуляции составляет значение Mset2, от времени tp1(2) зазора и короткого импульса, имеющих ширину p1 зазора во втором шаблоне переключения, в котором степень M модуляции составляет значение Mset1. Помимо этого, когда на этапе S630 определяется то, что переключение со второго шаблона переключения на первый шаблон переключения не выполняется, обработка задания времени tp1 является необязательной, поскольку переключение выполняется с первого шаблона переключения на квадратно–волновой импульсный шаблон.
Затем, аналогично этапу S450 обработки переключения между первым шаблоном переключения и квадратно–волновым импульсным шаблоном на фиг. 15, фаза θ напряжения задается на основе угловой скорости ω, степени M модуляции, напряжения VH линии 42 подачи мощности высокого напряжения и команды Tm* управления крутящим моментом (этап S650). После этого обработка завершается.
Выше описываются переключение со второго шаблона переключения на первый шаблон переключения и переключение с первого шаблона переключения на квадратно–волновой импульсный шаблон с использованиям обработки переключения импульсного шаблона. Тем не менее, аналогично вышеописанному, переключение с квадратно–волнового импульсного шаблона на первый шаблон переключения и переключение с первого шаблона переключения во второй шаблон переключения при обработке переключения импульсного шаблона могут выполняться. Кроме того, обработка переключения импульсного шаблона на фиг. 22 может применяться к переключению между промежуточным вторым шаблоном переключения и промежуточным первым шаблоном переключения и к переключению между промежуточным первым шаблоном переключения и промежуточным квадратно–волновым импульсным шаблоном в промежуточном режиме управления.
Аналогично вышеописанному устройству управления, смонтированному на электротранспортном средстве модифицированного примера, при переключении между первым шаблоном переключения и квадратно–волновым импульсным шаблоном в квадратно–волновом режиме управления, ширина p1 зазора и короткого импульса первого шаблона переключения постепенно изменяется. В связи с этим, можно ограничивать вибрацию вследствие флуктуации крутящего момента, возникающую вместе с внезапным изменением степени M модуляции, которое может возникать при переключении между первым шаблоном переключения и квадратно–волновым импульсным шаблоном. Дополнительно, при переключении между вторым шаблоном переключения и первым шаблоном переключения в квадратно–волновом режиме управления, ширина p1of зазор и короткий импульс, из числа двух зазоров и двух коротких импульсов во втором шаблоне переключения, соответствующих зазору и короткому импульсу в первом шаблоне переключения, постепенно изменяется, и ширина p2 суммированного зазора и короткого импульса, из числа двух зазоров и двух коротких импульсов во втором шаблоне переключения, постепенно изменяется. В связи с этим, можно ограничивать вибрацию вследствие флуктуации крутящего момента, возникающую вместе с внезапным изменением степени M модуляции, которое может возникать при переключении между вторым шаблоном переключения и первым шаблоном переключения.
В устройстве управления, смонтированном на электротранспортном средстве 120 согласно второму варианту осуществления либо его модифицированном примере, промежуточный режим управления имеет промежуточный второй шаблон переключения, промежуточный первый шаблон переключения и промежуточный квадратно–волновой импульсный шаблон. Тем не менее, как проиллюстрировано во взаимосвязи между числом Nm оборотов электромотора 32, крутящим моментом Tm и режимом управления модифицированного примера на фиг. 9, промежуточный режим управления может иметь промежуточный второй шаблон переключения и промежуточный первый шаблон переключения, но не должен иметь промежуточный квадратно–волновой импульс. Дополнительно, как проиллюстрировано во взаимосвязи между числом Nm оборотов электромотора 32, крутящим моментом Tm и режимом управления модифицированного примера на фиг. 12 и 13, квадратно–волновой режим управления может иметь квадратно–волновой импульсный шаблон и первый шаблон переключения, но не должен иметь второй шаблон переключения. Помимо этого, промежуточный режим управления не должен предоставляться.
Выше описано соответствие между основными элементами в варианте осуществления и основными элементами изобретения, описанного в разделе "Сущность изобретения". В варианте осуществления, электромотор 32 представляет собой "электромотор", инвертор 34 представляет собой "инвертор", аккумулятор 36 представляет собой "устройство накопления мощности", и электронный модуль 50 управления представляет собой "устройство управления".
Помимо этого, соответствие между основными элементами в варианте осуществления и основными элементами изобретения, описанного в разделе "Сущность изобретения", не ограничивает элементы изобретения, описанного в разделе "Сущность изобретения", поскольку вариант осуществления представляет собой пример для подробного пояснения аспекта для того, чтобы реализовывать изобретение. Другими словами, изобретение, описанное в разделе "Сущность изобретения", должно интерпретироваться на основе описания в нем, и вариант осуществления представляет собой просто конкретный пример изобретения, описанного в разделе "Сущность изобретения".
Как описано выше, хотя аспект для реализации настоящего изобретения описывается со ссылкой на вариант осуществления, настоящее изобретение вообще не ограничено этим при всех, и различные варьирования могут надежно вноситься в пределах объема изобретения.
Настоящее изобретение является применимым к производственной отрасли для устройства управления электромотором.
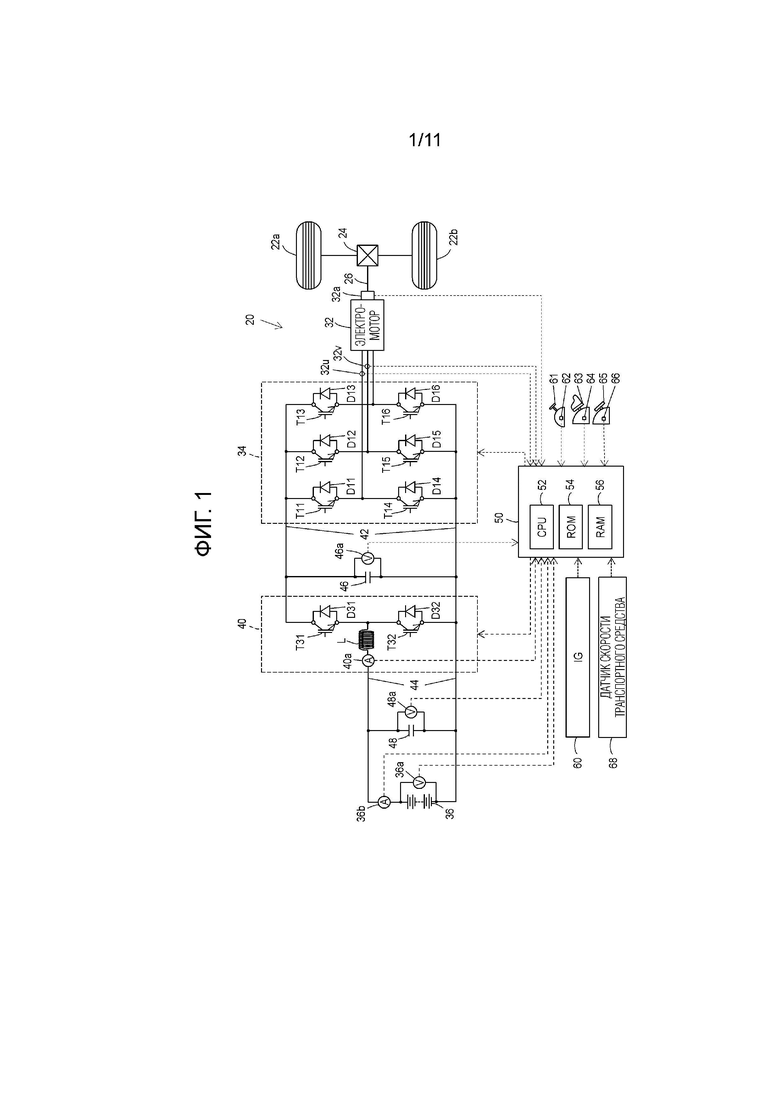
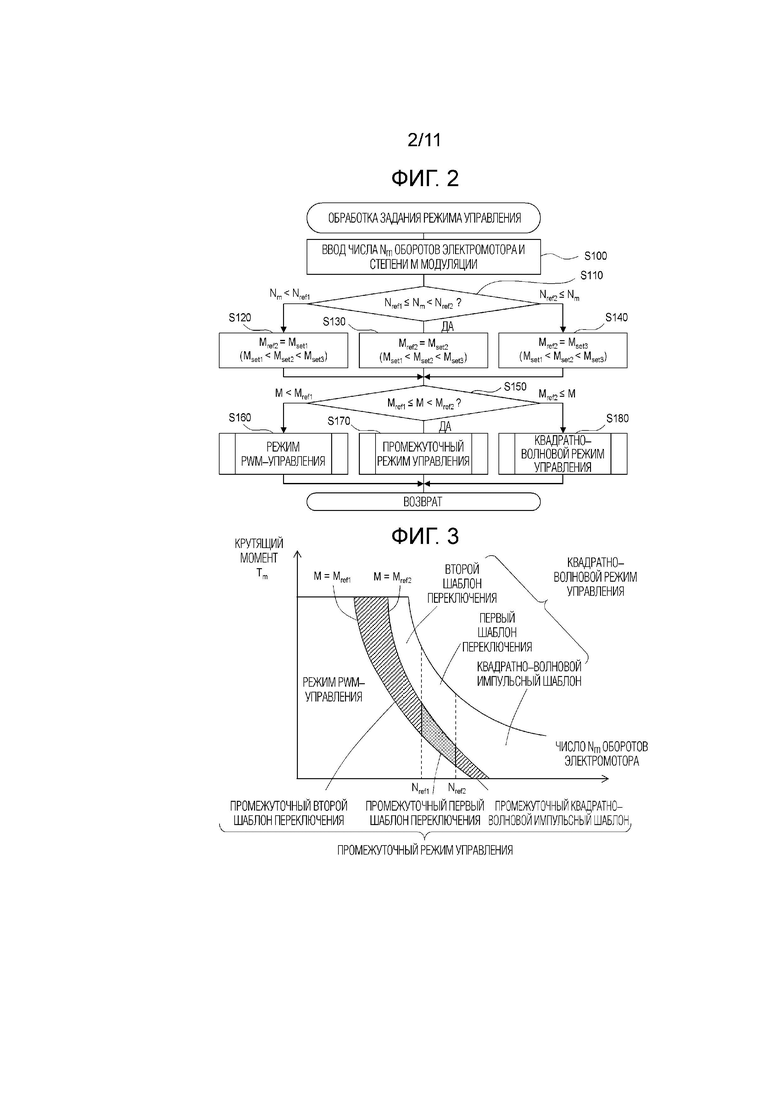
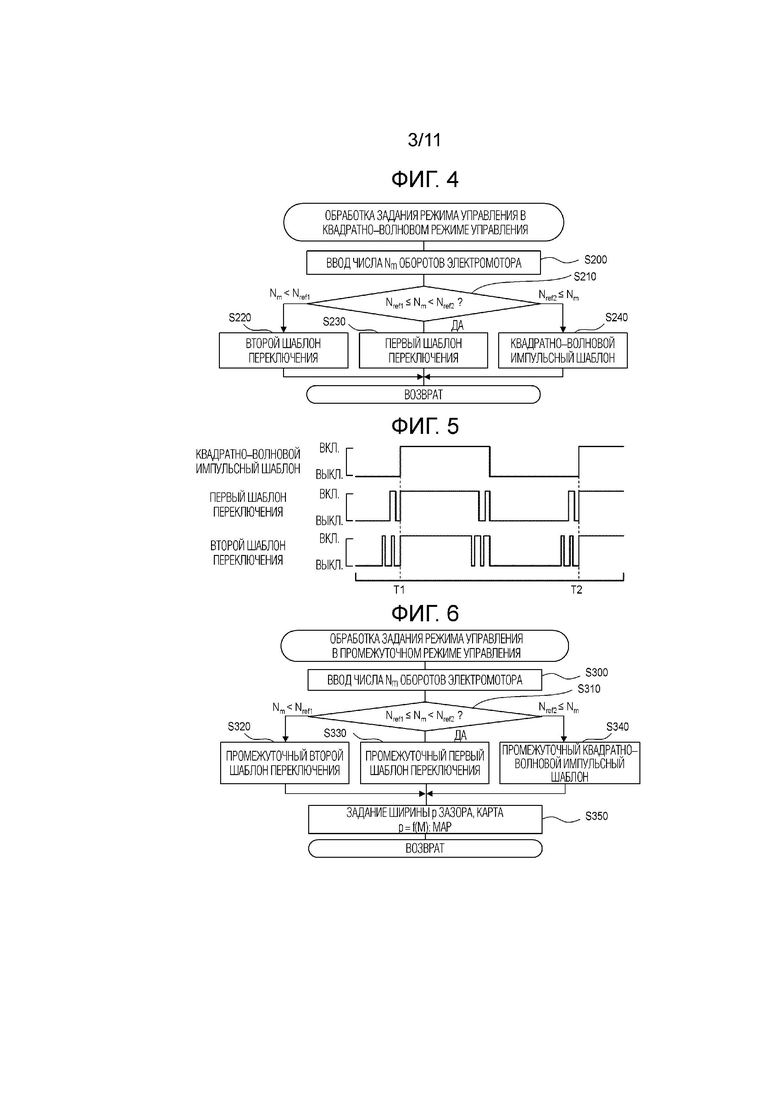
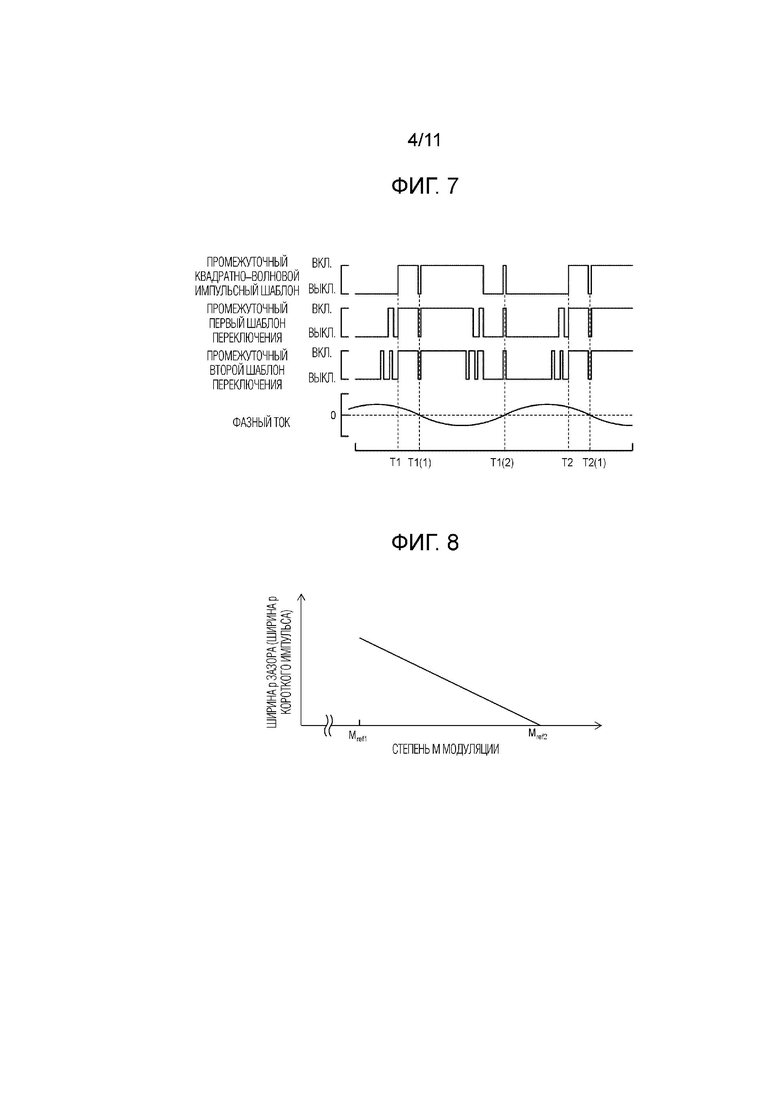
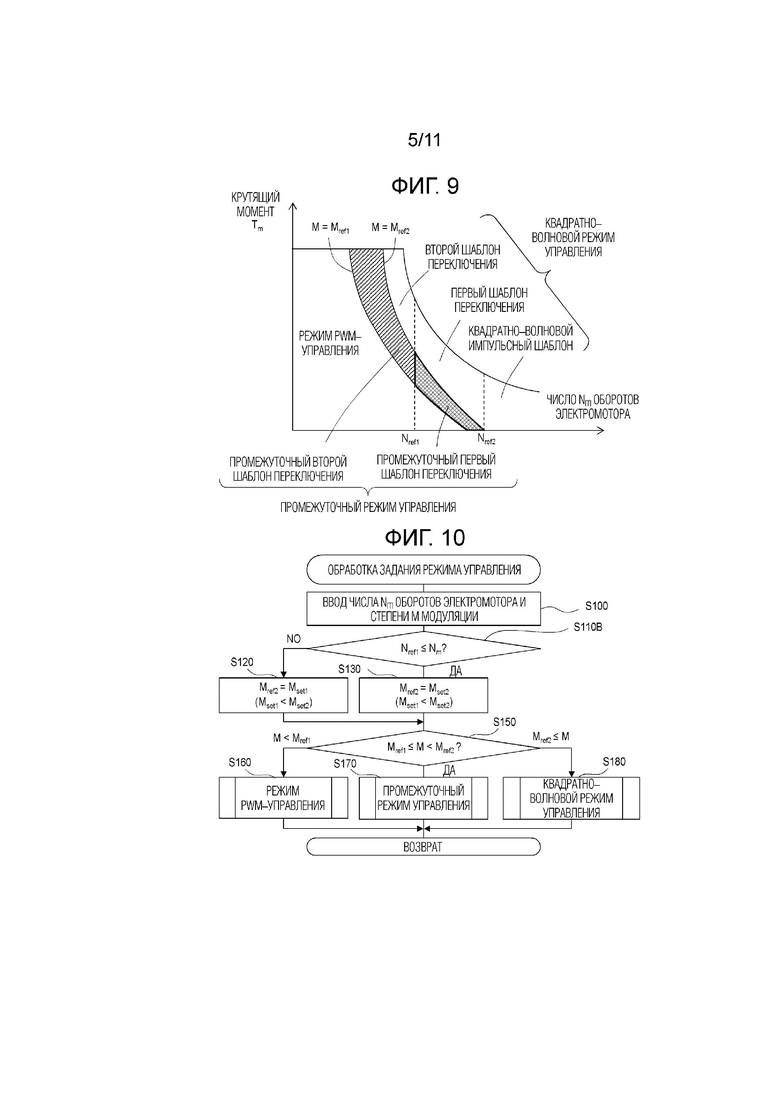
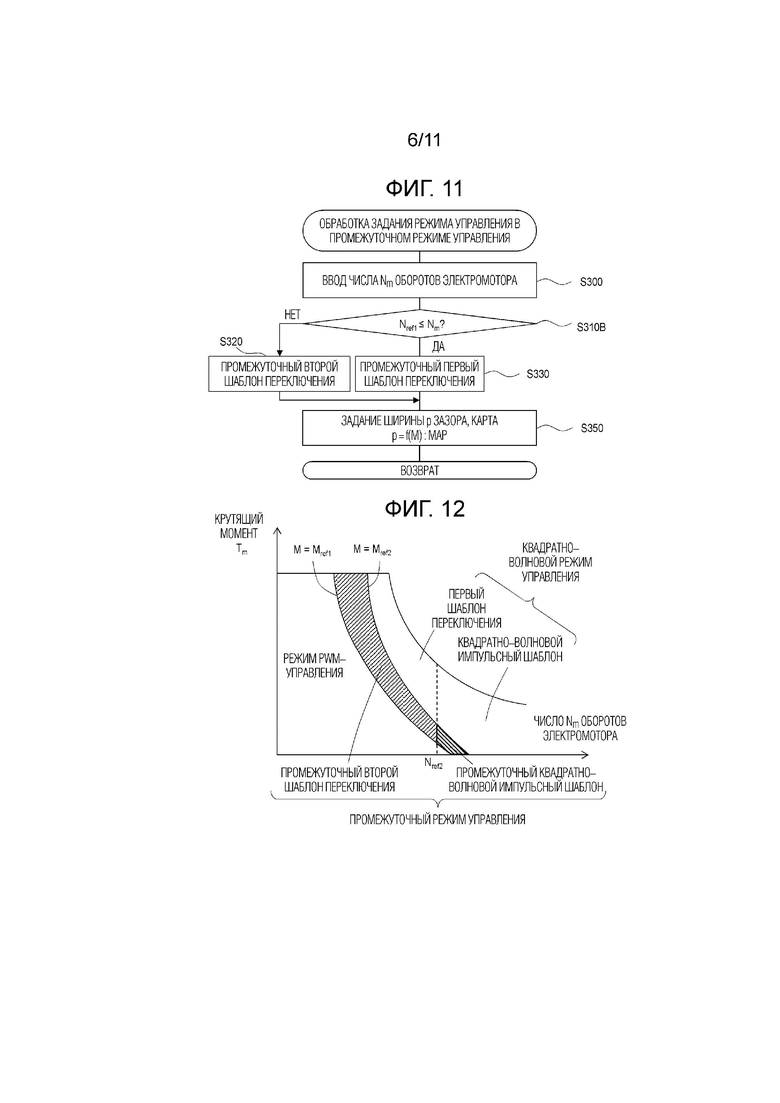
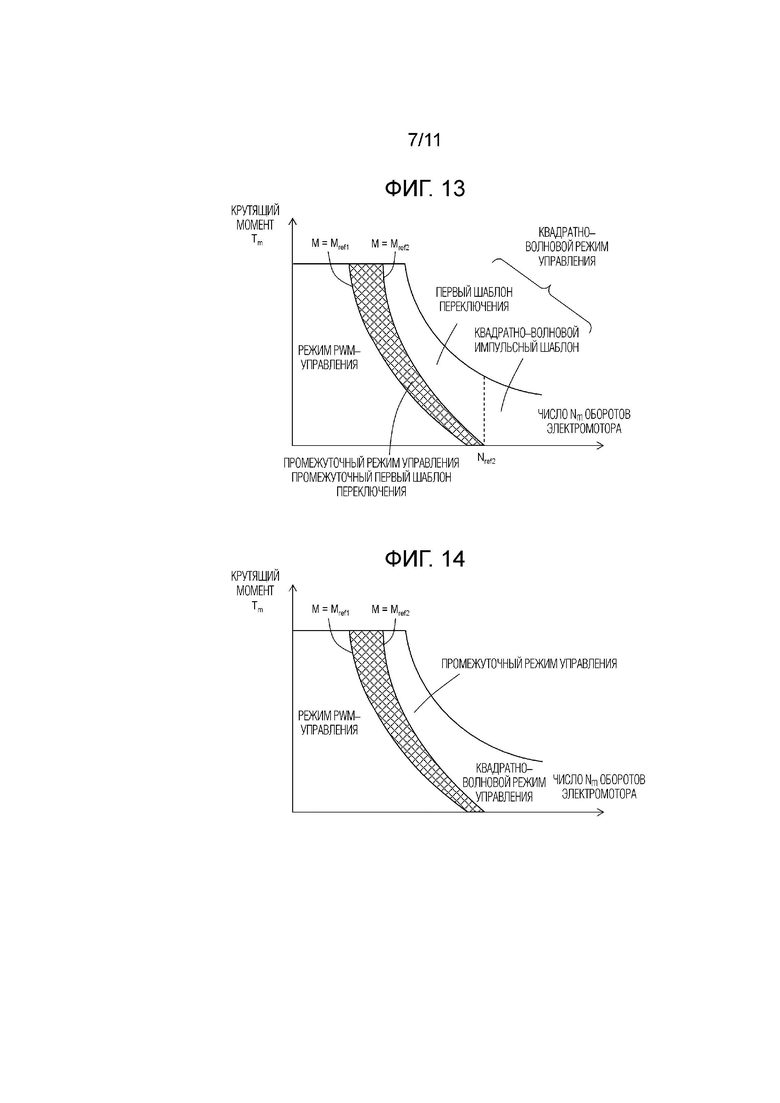
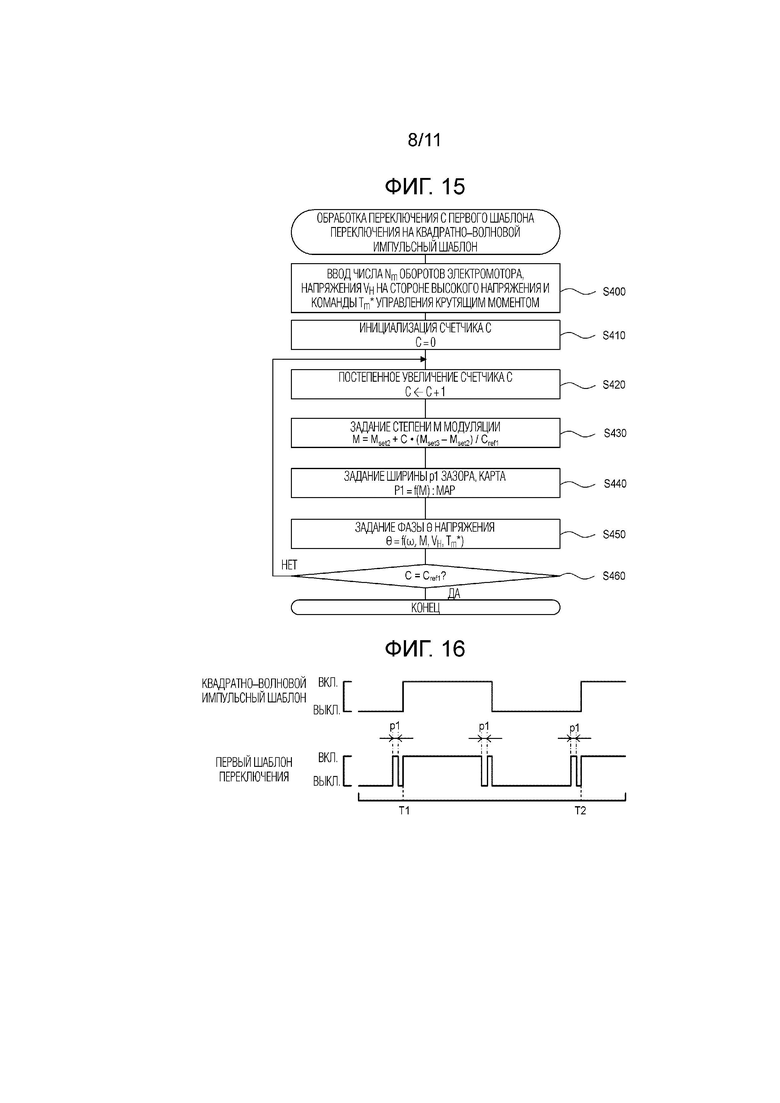
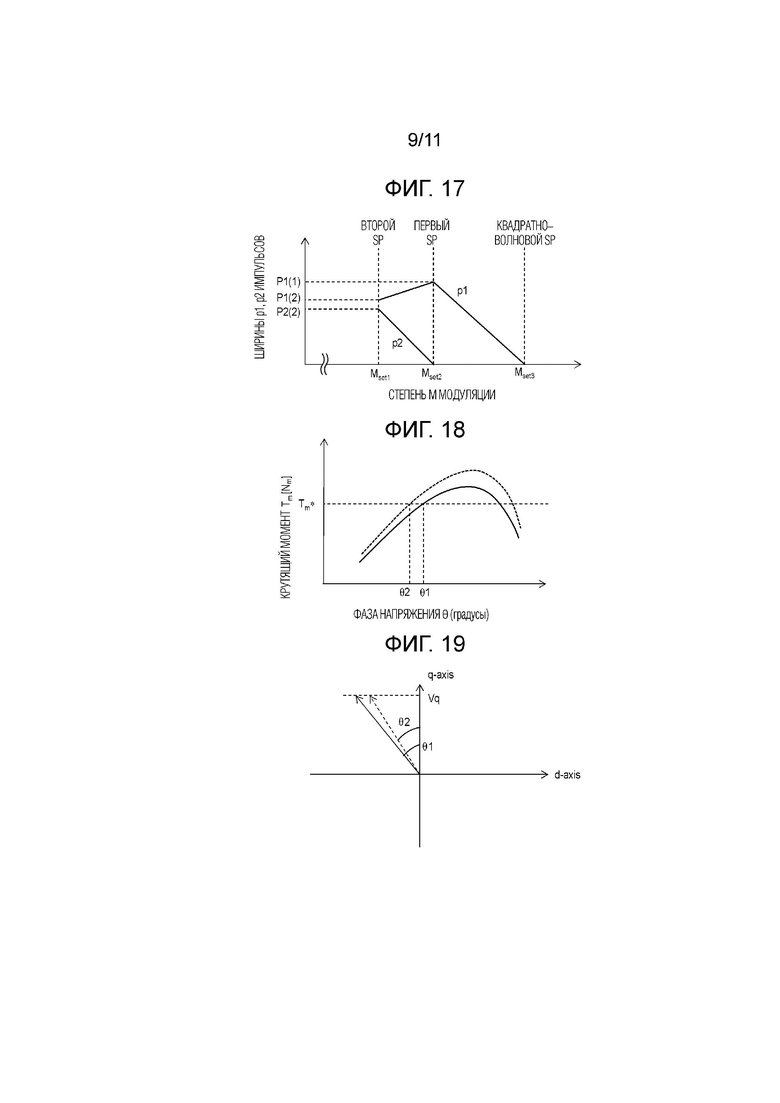
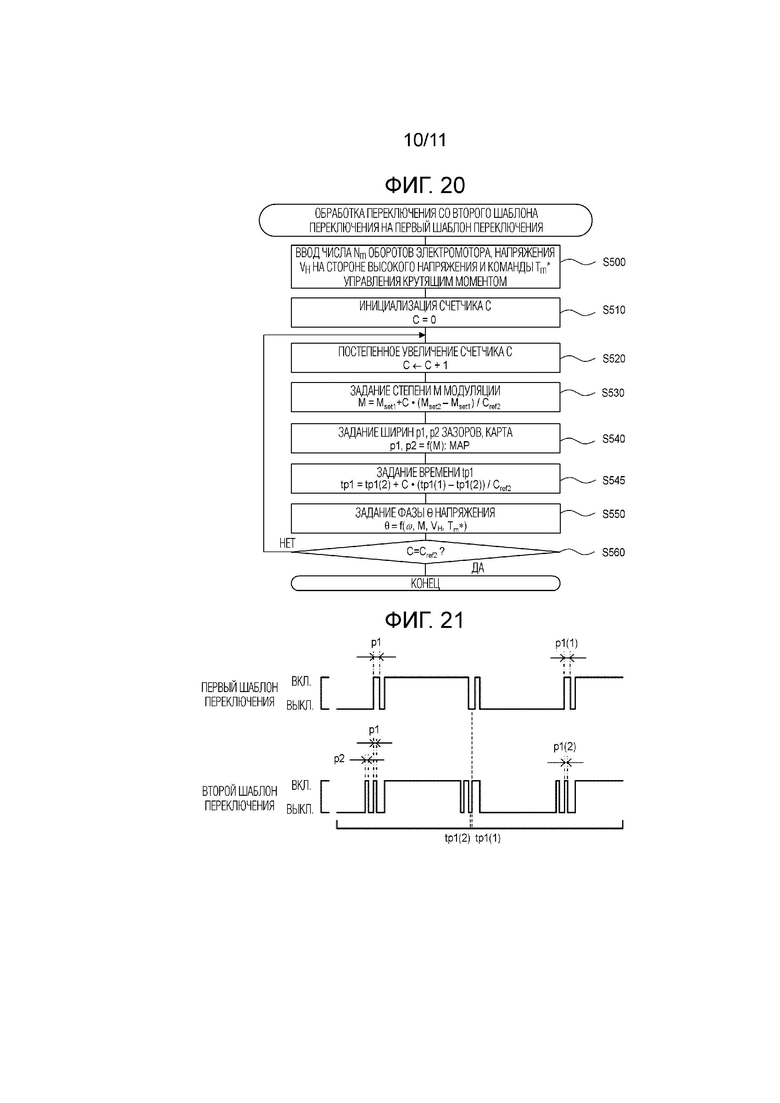
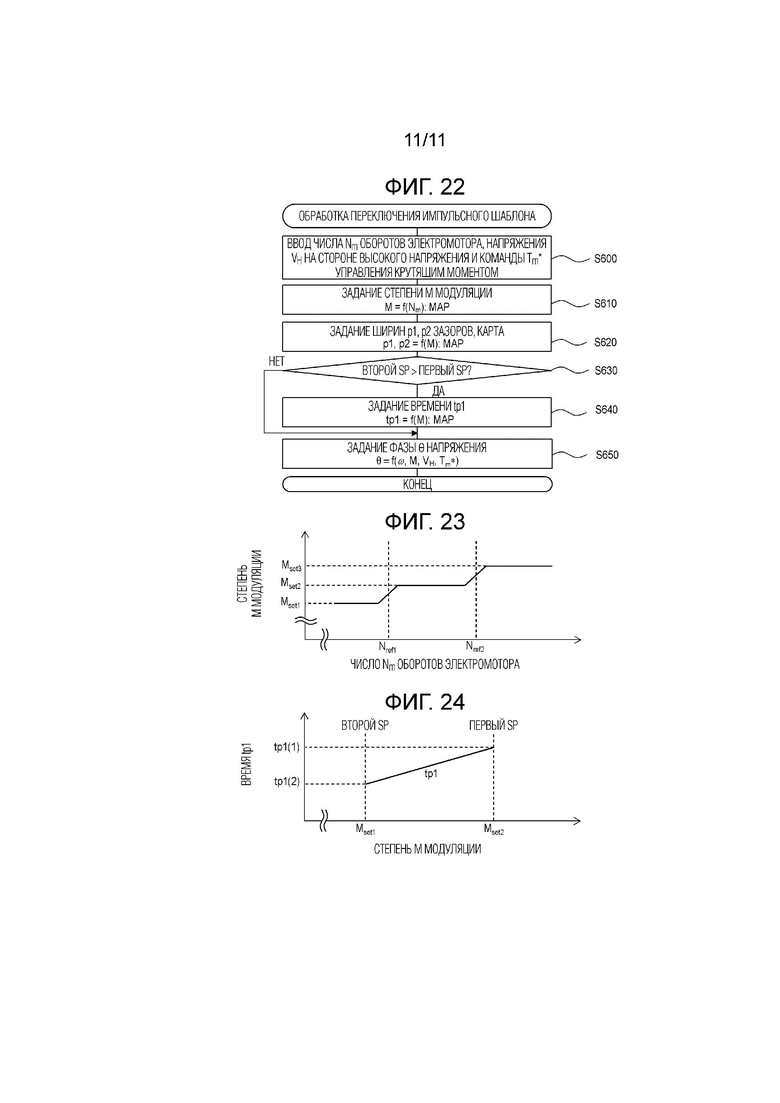
Группа изобретений относится к устройствам управления двигателями переменного тока. Устройство управления электромотором содержит электронный модуль управления. Электронный модуль управления выполнен с возможностью переключения переключающего элемента инвертора в режиме управления с широтно–импульсной модуляцией, когда степень модуляции меньше первого заданного значения, выполнен с возможностью переключения переключающего элемента инвертора в квадратно–волновом режиме управления, когда степень модуляции превышает или равна второму заданному значению, которое превышает первое заданное значение, и выполнен с возможностью переключения переключающего элемента инвертора в промежуточном режиме управления, когда степень модуляции превышает или равна первому заданному значению и меньше второго заданного значения. Причем промежуточный режим управления использует шаблон переключения, в котором, в импульсном шаблоне в квадратно–волновом режиме управления, зазор или короткий импульс, имеющий ширину, идентичную ширине зазора, формируется согласно тому, присутствует или нет импульс в то время, когда фазный ток переходит через ноль. Также заявлен вариант устройства управления электромотором. Технический результат заключается в снижении резонанса или вибрации при переключении режима управления. 2 н. и 12 з.п. ф-лы, 24 ил.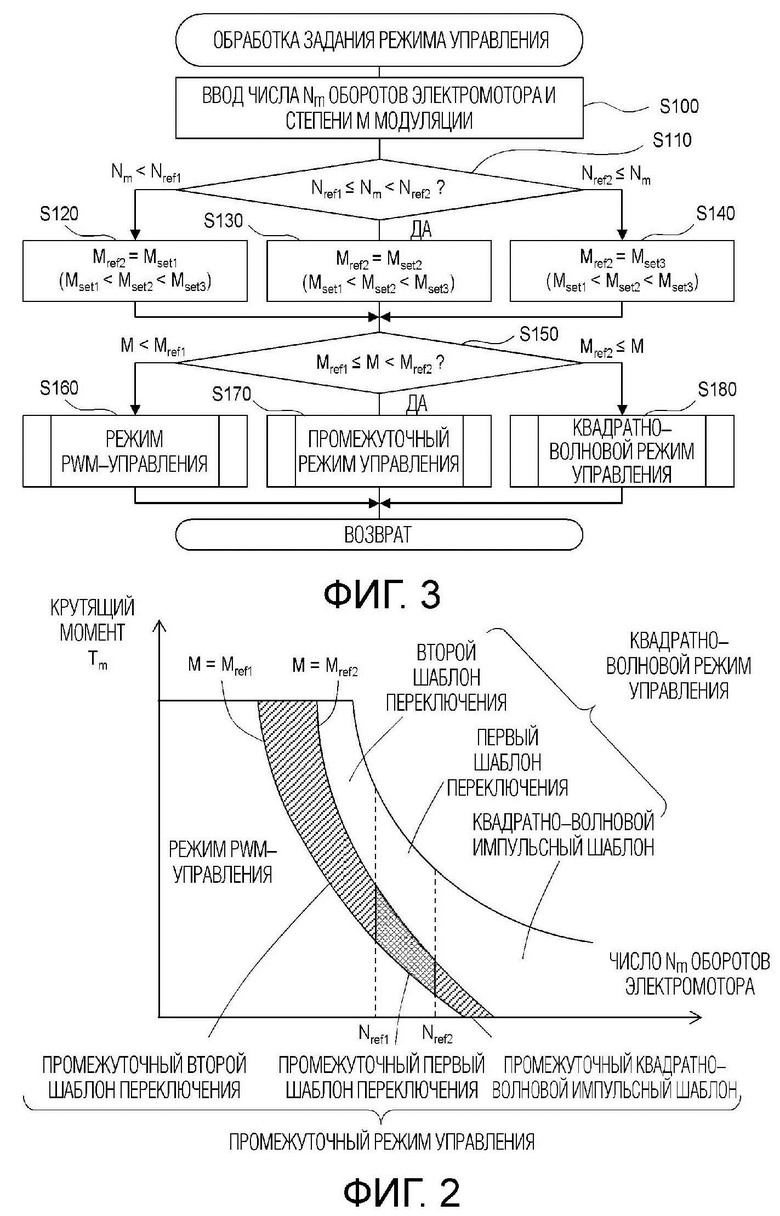
1. Устройство управления электромотором, установленное на приводном устройстве, включающем в себя электромотор, инвертор, выполненный с возможностью приведения в действие электромотора, и устройство накопления мощности, выполненное с возможностью обмена мощностью с электромотором через инвертор, причем устройство управления электромотором содержит электронный модуль управления, выполненный с возможностью:
выполнения управления переключением переключающего элемента инвертора в режиме управления с широтно–импульсной модуляцией, когда степень модуляции меньше первого заданного значения;
выполнения управления переключением переключающего элемента инвертора в квадратно–волновом режиме управления, когда степень модуляции превышает или равна второму заданному значению, которое превышает первое заданное значение; и
выполнения управления переключением переключающего элемента инвертора в промежуточном режиме управления, когда степень модуляции превышает или равна первому заданному значению и меньше второго заданного значения, причем промежуточный режим управления использует шаблон переключения, в котором, в импульсном шаблоне в квадратно–волновом режиме управления, зазор формируется в случае, если импульс присутствует в то время, когда фазный ток переходит через нуль, и короткий импульс, имеющий такую же ширину, что и зазор, формируется в случае, если импульс не присутствует в то время, когда фазный ток переходит через нуль.
2. Устройство управления электромотором по п. 1, в котором промежуточный режим управления представляет собой режим с использованием шаблона переключения, в котором ширины зазора и короткого импульса снижаются по мере того, как увеличивается степень модуляции.
3. Устройство управления электромотором по п. 2, в котором электронный модуль управления выполнен с возможностью постепенного изменения ширин зазора и короткого импульса до тех пор, пока ширины не становятся нулевыми при переключении с промежуточного режима управления на квадратно–волновой режим управления.
4. Устройство управления электромотором по любому из пп. 1–3, в котором:
квадратно–волновой режим управления использует, когда число оборотов электромотора превышает или равно первому заданному числу оборотов, которое превышает первую резонансную область, квадратно–волновой импульсный шаблон, в котором первая половина или вторая половина одного периода становится квадратно–волновым импульсом, и использует, когда число оборотов электромотора меньше первого заданного числа оборотов, первый шаблон переключения, в котором один или более зазоров формируются в области, в которой присутствует квадратно–волновой импульс, и один или более коротких импульсов, имеющих ширину, идентичную ширине зазоров, формируются одновременно с тем, когда формируются зазоры, в области, в которой квадратно–волновой импульс не присутствует в квадратно–волновом импульсном шаблоне, причем первый шаблон переключения ограничивает LC–резонанс в первой резонансной области; и
второе заданное значение больше тогда, когда число оборотов электромотора превышает или равно первому заданному числу оборотов, чем когда число оборотов меньше первого заданного числа оборотов.
5. Устройство управления электромотором по п. 4, в котором:
квадратно–волновой режим управления использует второй шаблон переключения, когда число оборотов электромотора меньше второго заданного числа оборотов, которое меньше первого заданного числа оборотов, причем второй шаблон переключения имеет большее число зазоров и коротких импульсов, чем зазоры и короткие импульсы первого шаблона переключения, и ограничивает LC–резонанс во второй резонансной области, включенной в диапазон числа оборотов, меньшего второго заданного числа оборотов; и
второе заданное значение меньше тогда, когда число оборотов электромотора меньше второго заданного числа оборотов, чем когда число оборотов превышает или равно второму заданному числу оборотов.
6. Устройство управления электромотором, установленное на приводном устройстве, включающем в себя электромотор, инвертор, выполненный с возможностью приведения в действие электромотора, и устройство накопления мощности, выполненное с возможностью обмена мощностью с электромотором через инвертор, причем устройство управления электромотором содержит электронный модуль управления, выполненный с возможностью:
выполнения управления переключением переключающего элемента инвертора посредством переключения между режимом управления с широтно–импульсной модуляцией и квадратно–волновым режимом управления согласно степени модуляции, при этом квадратно–волновой режим управления использует, когда число оборотов электромотора превышает или равно первому заданному числу оборотов, которое превышает первую резонансную область, квадратно–волновой импульсный шаблон, в котором первая половина или вторая половина одного периода становится квадратно–волновым импульсом и использует, когда число оборотов электромотора меньше первого заданного числа оборотов, которое превышает первую резонансную область, первый шаблон переключения, в котором один или более зазоров формируются в области, в которой присутствует квадратно–волновой импульс, и один или более коротких импульсов, имеющих такую же ширину, что и зазоры, формируются одновременно с тем, когда формируются зазоры, в области, в которой квадратно–волновой импульс не присутствует в квадратно–волновом импульсном шаблоне, причем первый шаблон переключения ограничивает LC–резонанс в первой резонансной области; и
выполнения управления первым постепенным варьированием, при котором ширины зазоров и коротких импульсов первого шаблона переключения постепенно изменяются таким образом, что они становятся небольшими при переключении с первого шаблона переключения на квадратно–волновой импульсный шаблон.
7. Устройство управления электромотором по п. 6, в котором электронный модуль управления выполнен с возможностью, в качестве управления первым постепенным варьированием, задавать ширины зазоров и коротких импульсов или степень модуляции пошагово за множество шагов.
8. Устройство управления электромотором по п. 6, в котором электронный модуль управления выполнен с возможностью, в качестве управления первым постепенным варьированием, когда число оборотов электромотора превышает первое пороговое число оборотов для переключения первого шаблона переключения на квадратно–волновой импульсный шаблон, задавать степень модуляции таким образом, что она постепенно увеличивается со степени модуляции первого шаблона переключения к степени модуляции квадратно–волнового импульсного шаблона, и задавать ширины зазоров и коротких импульсов посредством использования заданной степени модуляции и взаимосвязи, в которой ширины снижаются по мере того, как степень модуляции увеличивается.
9. Устройство управления электромотором по п. 7 или 8, в котором электронный модуль управления выполнен с возможностью, в качестве управления первым постепенным варьированием, задавать фазу напряжения согласно заданной степени модуляции и выполнять управление переключением переключающего элемента инвертора таким образом, что заданная фаза напряжения достигается в первом шаблоне переключения, в котором используются заданные ширины зазоров и коротких импульсов.
10. Устройство управления электромотором по любому из пп. 6–8, в котором:
квадратно–волновой режим управления использует второй шаблон переключения, когда число оборотов электромотора меньше второго заданного числа оборотов, которое меньше первого заданного числа оборотов, при этом второй шаблон переключения имеет большее число зазоров и коротких импульсов, чем зазоры и короткие импульсы первого шаблона переключения, и ограничивает LC–резонанс во второй резонансной области, включенной в диапазон числа оборотов, меньшего второго заданного числа оборотов; и
электронный модуль управления выполнен с возможностью, при переключении со второго шаблона переключения на первый шаблон переключения, выполнения управления вторым постепенным варьированием, при котором ширины зазоров и коротких импульсов второго шаблона переключения, которые не соответствуют зазорам и коротким импульсам первого шаблона переключения, постепенно изменяются таким образом, что они становятся небольшими.
11. Устройство управления электромотором по п. 10, в котором электронный модуль управления выполнен с возможностью, в качестве управления вторым постепенным варьированием, задавать ширины зазоров и коротких импульсов или степень модуляции пошагово за множество шагов.
12. Устройство управления электромотором по п. 10, в котором электронный модуль управления выполнен с возможностью, в качестве управления вторым постепенным варьированием, когда число оборотов электромотора превышает второе пороговое число оборотов для переключения второго шаблона переключения на первый шаблон переключения, задавать степень модуляции таким образом, что она постепенно увеличивается со степени модуляции второго шаблона переключения к степени модуляции первого шаблона переключения, и задавать ширины зазоров и коротких импульсов посредством использования заданной степени модуляции и взаимосвязи, в которой ширины снижаются по мере того, как степень модуляции увеличивается.
13. Устройство управления электромотором по п. 11, в котором электронный модуль управления выполнен с возможностью, в качестве управления вторым постепенным варьированием, задавать фазу напряжения согласно заданной степени модуляции и выполнять управление переключением переключающего элемента инвертора таким образом, что заданная фаза напряжения достигается во втором шаблоне переключения, в котором используются заданные ширины зазоров и коротких импульсов.
14. Устройство управления электромотором по п. 10, в котором электронный модуль управления выполнен с возможностью, в качестве управления вторым постепенным варьированием при переключении со второго шаблона переключения на первый шаблон переключения, постепенного изменения одного или более зазоров и коротких импульсов, из числа зазоров и коротких импульсов во втором шаблоне переключения, соответствующих зазорам и коротким импульсам в первом шаблоне переключения таким образом, что время и ширины соответствующих зазоров и коротких импульсов совпадают со временем и ширинами зазоров и коротких импульсов в первом шаблоне переключения.
| JP 2017131094 A, 27.07.2017 | |||
| US 2009237019 A1, 24.09.2009 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2659372C1 |
| СПОСОБ СОГЛАСОВАННОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ ГИБРИДНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2557686C1 |

