Предлагаемые способ наведения управляемой ракеты и система наведения управляемой ракеты относятся к области разработки систем управления ракетами и могут быть использованы в противотанковых ракетных комплексах (ПТРК).
Наиболее близким к предлагаемому является способ наведения противотанковой ракеты, реализованный в ПТРК 9К111 "Фагот" и взятый в качестве прототипа [1, Пусковая установка 9П135. Техническое описание. Ордена Трудового Красного Знамени Военное издательство Министерства обороны СССР, Москва - 1975 г., стр.11-13], включающий запуск противотанковой ракеты с бортовым источником излучения, прохождение светового потока от источника излучения через объектив и оптический растр, модуляцию светового потока с помощью оптического растра, прием модулированного светового потока от источника излучения фотоприемником со сплошной фоточувствительной поверхностью, выделение координат бортового источника излучения, определение координат противотанковой ракеты и формирование команд управления противотанковой ракетой.
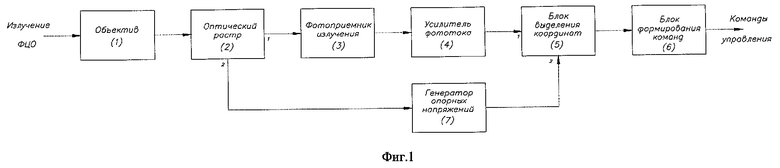
Наиболее близкой к предлагаемой является система наведения противотанковой ракеты, реализующая известный способ наведения противотанковой ракеты и применяемая в переносном ПТРК 9К111 "Фагот" [1, Пусковая установка 9П135. Техническое описание. Ордена Трудового Красного Знамени Военное издательство Министерства обороны СССР, Москва - 1975 г., стр.11-13]. Эта система наведения содержит последовательно соединенные объектив, принимающий сигнал от бортового источника излучения, оптический растр, фотоприемник излучения, усилитель фототока, блок выделения координат и блок формирования команд, а также генератор опорных напряжений, подключенный между оптическим растром и блоком выделения координат.
Функциональная схема системы наведения противотанковой ракеты, реализующей известный способ наведения противотанковой ракеты, приведена на фиг.1.
Система наведения противотанковой ракеты работает следующим образом. Входным воздействием для нее является угловое отклонение бортового источника излучения противотанковой ракеты от линии прицеливания. Объектив (1), фокусирует излучение фоноцелевой обстановки (ФЦО) с бортовым источником излучения на оптическом растре (2), который имеет прозрачные и непрозрачные сектора, расположенные радиально, и совершает плоскопараллельное перемещение (сканирование), что обеспечивает частотную модуляцию и пространственную селекцию светового потока бортового источника излучения. Частотно-модулированный световой поток воспринимается фотоприемником излучения (3) и преобразуется в соответствующие электрические сигналы. Частотно-модулированный сигнал с фотоприемника поступает в усилитель фототока (4), где усиливается до необходимого значения. Выходной сигнал с усилителя фототока содержит информацию об угловых отклонениях источника излучения ракеты от линии прицеливания, которая поступает в блок выделения координат (5). После преобразования сигнала усилителя фототока блок выделения координат вырабатывает напряжения, соответствующие уже линейным отклонениям ракеты от линии прицеливания. В качестве опорных напряжений при фазовом детектировании используются сигналы с генератора опорных напряжений (7). Напряжения, пропорциональные отклонениям ракеты от линии прицеливания по курсу и тангажу, с выхода блока выделения координат поступают на блок формирования команд (6), где преобразуются в сигналы управления, предназначенные для передачи по ПЛС на ракету.
Современные условия развития ПТРК поставили задачу решения ряда принципиальных технических особенностей, свойственных данным способу наведения противотанковой ракеты и системе наведения для его реализации. Так система наведения противотанковой ракетой устойчиво работает только при наличии в поле зрения объектива одного единственного источника полезного сигнала - бортового источника излучения противотанковой ракеты. Но при современных условиях ведения боевых действий фоноцелевая обстановка (ФЦО) может содержать высокоинтенсивные световые помехи - источники оптических помех (ОП), количество которых может быть произвольным. При попадании излучения такой световой помехи совместно с полезным источником излучения в объектив возможен срыв управления ракетой, несмотря на частотную модуляцию и пространственную селекцию светового потока бортового источника излучения оптическим растром. Это обусловлено тем, что фотоприемник будет вырабатывать сигнал, соответствующий среднегеометрическому положению всех источников излучения, находящихся в поле зрения объектива, а это приведет к существенному снижению точности выделения координат бортового источника излучения. Кроме того, для осуществления модуляции светового потока необходимо соблюдать как высокие технологические требования по установке и юстировке оптического растра, так и обеспечивать высокие точностные характеристики при стабилизации частоты опорного напряжения. К тому же, фотоприемник может вносить высокие шумовые составляющие в результирующий сигнал на его выходе (особенно при высоких температурах эксплуатации), что существенно уменьшает соотношение сигнал/шум в системе управления.
Задачей предлагаемого изобретения является разработка такого способа наведения управляемой ракеты и системы наведения управляемой ракеты, которые позволили бы повысить качество и надежность процесса наведения управляемой ракеты без изменения конструкции самой ракеты, осуществлять селекцию источника полезного сигнала среди возможных оптических помех, существенно упростить конструкцию аппаратуры управления, повысить соотношение сигнал/шум и, как следствие, повысить помехозащищенность всей системы управления.
Поставленная задача решается тем, что в способе наведения управляемой ракеты, включающем старт управляемой ракеты с бортовым источником излучения, прием и фокусировку на фотоприемнике излучения фоноцелевой обстановки с источником полезного сигнала, выделение координат источника полезного сигнала, определение координат управляемой ракеты и формирование команд управления для передачи на ракету, перед стартом управляемой ракеты в качестве программных значений запоминают изменение параметров, характеризующих отличительную особенность движения бортового источника излучения, определяют максимальное и минимальное значения параметров, характеризующих отличительную особенность движения бортового источника излучения, в процессе выделения координат бортового источника излучения определяют и запоминают параметры движения всех источников излучения, сравнивают текущие параметры движения каждого из источников излучения с программными значениями, а формирование команд управления осуществляют в соответствии с координатами изображения того источника излучения, параметры движения которого соответствуют программным и находятся между максимальным и минимальным значениями.
В частном случае, в качестве параметров, характеризующих отличительную особенность движения бортового источника излучения, используют изменение длины вектора перемещения, угол поворота вектора перемещения и направление движения бортового источника излучения.
В качестве параметров, характеризующих отличительную особенность движения бортового источника излучения, используют изменение радиуса вращения относительно продольной оси управляемой ракеты, изменение частоты вращения и направление движения бортового источника излучения.
В качестве параметров, характеризующих отличительную особенность движения бортового источника излучения, используют изменение линейной скорости движения и направление движения бортового источника излучения.
В качестве параметров, характеризующих отличительную особенность движения бортового источника излучения, используют изменение составляющих координат центра масс бортового источника излучения, а также изменение координат центра масс ракеты.
Поставленная задача решается также тем, что в систему наведения управляемой ракеты, содержащую объектив, фотоприемник излучения и последовательно соединенные блок выделения координат и блок формирования команд, дополнительно введены блок задания параметров движения, последовательно соединенные блок памяти, блок определения параметров движения и блок сравнения, причем вход объектива соединен с входом фотоприемника, первый выход которого соединен с блоком выделения координат, а второй выход соединен с блоком памяти, выход блока сравнения соединен со вторым входом блока выделения координат, а блок задания параметров движения подключен ко второму входу блока сравнения.
Функциональная схема системы наведения управляемой ракеты приведена на фиг.2.
Система наведения управляемой ракеты работает следующим образом. Излучение фоноцелевой обстановки (ФЦО) с бортовым источником излучения объектив (1) фокусирует непосредственно на фотоприемнике излучения (3), выполненном на основе фоточувствительного прибора матричного типа, на чувствительных ячейках которого образуются изображения, соответствующие всем источникам излучения, которые в данный момент времени присутствуют в поле зрения объектива. Блок памяти (8) осуществляет накопление информации с нескольких видеокадров изображения для анализа местоположения всех источников излучения. После этого в блоке определения параметров движения (9) для каждого из источника излучения, присутствующего в поле зрения объектива, рассчитываются параметры его движения (перемещения), которые отличают его от остальных источников излучения.
В качестве отличительной особенности движения бортового источника излучения и управляемой ракеты могут выступать как отдельные параметры, так и их комбинации, например, изменение длины вектора перемещения, угол поворота вектора перемещения и направление движения бортового источника излучения.
Для вращающихся по крену управляемых ракет, у которых источник излучения зафиксирован на определенном расстоянии от продольной оси ракеты, в качестве отличительной особенности движения бортового источника излучения можно использовать изменение радиуса вращения относительно продольной оси управляемой ракеты, изменение частоты вращения и направление движения бортового источника излучения.
В качестве отличительной особенности движения бортового источника излучения можно использовать изменение линейной скорости движения и направление движения бортового источника излучения.
В качестве отличительной особенности движения бортового источника излучения можно использовать изменение составляющих координат центра масс бортового источника излучения, а также изменение координат центра масс ракеты.
После определения параметров движения источника излучения производится их сравнение с программными значениями, заложенными в блоке задания параметров движения (11). Данное сравнение производится в блоке сравнения (10), который осуществляет выделение из всего числа источников излучения бортовой источник полезного сигнала управляемой ракеты. После этого блок выделения координат (5) осуществляет преобразование информации об угловых отклонениях бортового источника излучения управляемой ракеты от линии прицеливания в напряжения, соответствующие линейным отклонениям ракеты от линии прицеливания. Напряжения, пропорциональные отклонениям ракеты от линии прицеливания по курсу и тангажу, с выхода блока выделения координат поступают на блок формирования команд (6), где преобразуются в сигналы управления, предназначенные для передачи на ракету.
В предлагаемой системе наведения управляемой ракеты объектив, блок выделения координат и блок формирования команд могут быть выполнены как в прототипе. Фотоприемник излучения может быть выполнен на основе высокочастотной ПЗС-матрицы [2]. Блок памяти, блок определения параметров движения, блок сравнения и блок задания параметров движения могут быть выполнены на основе сигнальных микропроцессоров [3] и программируемых логических интегральных схем [4].
Предлагаемые способ наведения управляемой ракеты и система наведения управляемой ракеты по сравнению с прототипами позволяют достичь:
- упрощения конструкции системы наведения, уменьшения ее габаритно-массовых характеристик;
- существенного повышения надежности и помехозащищенности системы наведения;
- повышения точности наведения управляемой ракеты без изменения конструкции самой ракеты.
Обосновать работу системы наведения управляемой ракеты можно следующим образом. Исходными данными является последовательность видеокадров с изображением источника излучения, по которым необходимо осуществить построение траектории источника излучения.
Определение траектории бортового источника излучения управляемой ракеты по последовательности видеоизображений на фоне других источников излучения может быть решена следующим образом.
В каждом видеокадре осуществляется расчет координат смещения геометрического центра изображения каждого источника излучения относительно оптической оси пеленгатора:

где Yc - координата оптической оси пеленгатора по вертикали;
Хc - координата оптической оси пеленгатора по горизонтали;
N - количество ячеек фотоприемника в изображении источника;
nyi, nxi - координаты ячеек фотоприемника в изображении источника.
Определение смещения энергетического центра изображения источника излучения, соответствующего энергетическому центру данного изображения с учетом уровней сигналов si с фотоприемника, а также определение смещения этой ячейки относительно координаты оптической оси можно осуществить по формулам:

где si - уровни выходных сигналов с ячеек фотоприемника в изображении источника.
Использование зависимости (1) целесообразно, как правило, на участке управления, когда область засвеченного пространства от бортового источника излучения имеет незначительные размеры, либо накладываются ограничения на допустимые вычислительные ресурсы оптического пеленгатора при слабом требовании по точности выделения координат источника излучения.
Линейные координаты источника полезного сигнала относительно оптической оси пеленгатора определяются из (1) или соответственно (2):

где D - текущая дальность до источника полезного сигнала;
f - фокусное расстояние пеленгатора;
δf - размер ячейки фотоприемника излучения.
Координаты источника излучения соответствуют дискретным моментам времени, пусть n - номер текущего видеокадра. Траектория состоит из множества векторов перемещений источника, причем каждый вектор имеет следующие параметры:
R[n] - длина вектора перемещения;
ϕ[n] - угол поворота вектора перемещения относительно предыдущего вектора.
Расчет параметров относительного перемещения источника излучения осуществляется по формулам (4)-(5).


Определив истинные значения радиуса-вектора и угла поворота в каждый момент времени и сравнив их с рассчитанными программными значениями, можно найти изображение источника излучения, которое по своей вращательной составляющей движения соответствует бортовому источнику излучения и на основе его координат осуществлять формирование команд управления для передачи на ракету.
Селекция бортового источника на фоне помех осуществляется в этом случае по следующим условиям:


где Rmax[n]=Ro[n]+ΔR[n], Rmin[n]=Ro[n]-ΔR[n] - максимальное и минимальное значение вектора перемещения источника,
Ro[n] - программное значение вектора перемещения,
ΔR - величина допустимого отклонения от программного значения вектора перемещения,
ϕmax[n]=ϕo[n]+Δϕ[n], ϕmin[n]=ϕo[n]-Δϕ[n] - максимальное и минимальное значение угла поворота вектора перемещения,
ϕo[n] - программное значение угла поворота вектора перемещения,
Δϕ[n] - величина допустимого отклонения от программного значения угла поворота вектора перемещения.
Анализ формул (6)...(7) показывает, что в рассматриваемой системе осуществляется селекция источника полезного сигнала среди возможных оптических помех по признакам, характеризующим движение источника излучения относительно вращения ракеты. Это обеспечивает повышение помехоустойчивости системы управления.
Селекция бортового источника излучения по направлению осуществляется так же согласно формуле (7). Значение угла ϕ[n] будет характеризовать направление вращения ракеты.
Вращательное движение источника может характеризоваться следующими параметрами:
B[n] - радиус вращения;
ω[n] - частота вращения.
Расчет В[n] и ω[n], как правило, может осуществляться при большом количестве видеокадров изображений источника излучения с помощью преобразования Фурье.
Селекция бортового источника на фоне помех по характеристикам вращательного движения может осуществляться по следующим условиям:


где Bmax[n]=Bo[n]+ΔB[n], Bmin[n]=Bo[n]-ΔB[n] - максимальное и минимальное значение радиуса вращения,
Bo[n] - программное значение радиуса вращения,
ΔB[n] - величина допустимого отклонения от программного значения радиуса вращения,
ωmax[n]=ωo[n]+Δω[n], ωmin[n]=ωo[n]-Δω[n] - максимальное и минимальное значение частоты вращения,
ωo[n] - программное значение частоты вращения,
Δω[n] - величина допустимого отклонения от программного значения частоты вращения.
Селекция бортового источника излучения по направлению осуществляется так же согласно формуле (7). Значение угла ω[n] будет характеризовать направление вращения ракеты.
Анализ формул (7)...(9) показывает, что в рассматриваемой системе осуществляется селекция источника полезного сигнала среди возможных оптических помех по признакам, характеризующим движение источника излучения относительно вращения ракеты. Это обеспечивает повышение помехоустойчивости системы управления.
Скорость бортового источника излучения в картинной плоскости можно определить как:

где V[n] - скорость бортового источника излучения в картинной плоскости;

 - составляющие скорости движения бортового источника излучения от вращения ракеты и перемещения ее центра масс в вертикальной плоскости;
- составляющие скорости движения бортового источника излучения от вращения ракеты и перемещения ее центра масс в вертикальной плоскости;

 - составляющие скорости движения бортового источника излучения от вращения ракеты и перемещения ее центра масс в горизонтальной плоскости.
- составляющие скорости движения бортового источника излучения от вращения ракеты и перемещения ее центра масс в горизонтальной плоскости.
Линейную скорость движения бортового источника можно записать через угловую скорость движения:

где ωцм - угловая скорость движения центра масс ракеты;
ωвр - угловая скорость движения бортового источника излучения ракеты;
rцм - линейное отклонение центра масс ракеты;
rвр - отклонение бортового источника излучения относительно продольной оси ракеты - радиус вращения.
Как правило, в линейной скорости движения бортового источника излучения составляющая от вращения превосходит составляющую от движения центра масс и является известной полетной характеристикой управляемой ракеты. По этому признаку можно осуществлять селекцию источника вращения.
Вычисление линейной скорости движения центров изображений источников излучения осуществляется по следующей зависимости:

где Vx[n]=(ΔX[n]-ΔХ[n-1])/Td - вертикальная составляющая скорости,
Vy[n]=(ΔY[n]-ΔY[n-1])/Td - горизонтальная составляющая скорости,
Td - период следования видеокадров.
Выделение бортового источника излучения осуществляется по следующему условию:

где Vmin[n], Vmax[n] - минимальная и максимальная линейные скорости движения бортового источника излучения:
Vmax[n]=ωmax[n]В[n], Vmin[n]=ωmin[n]B[n],
ωmin[n], ωmax[n] - минимальная и максимальная угловые скорости движения ракеты,
В[n] - величина смещения бортового источника относительно оси вращения ракеты.
Дополнительным признаком выделения бортового источника излучения является направление вращения. При этом должна выполняться определенная смена знаков составляющих скорости. Так при вращении по часовой стрелке происходит следующая смена знаков:
Анализ формул (10)-(13) показывает, что в рассматриваемой системе обеспечивается селекция смещенного относительно оси вращения ракеты бортового источника излучения по скорости и направлению вращения ракеты, что обеспечивает повышение помехоустойчивости.
Следовательно, использование новых элементов, соединенных в соответствии с фиг.2 в предлагаемой системе наведения управляемой ракеты, выгодно отличает предлагаемое техническое решение от прототипа.
Источники литературы
1. Пусковая установка 9П135. Техническое описание. Ордена Трудового Красного Знамени Военное издательство Министерства обороны СССР, Москва - 1975 г., стр.11-13 - прототип.
2. Приборы с зарядовой связью / Под ред. М.Хоувза и Д.Моргана: Пер. с англ. - М.: Энергоиздат, 1981. - 376 с., ил.
3. Руководство пользователя по сигнальным микропроцессорам ADSP-2100 / Пер. с англ. О.В.Луневой; Под ред. А.Д.Викторова; Санкт-Петербургский государственный электротехнический университет. - Санкт-Петербург, 1997. - 520 с.
4. В.Б.Стешенко. ПЛИС фирмы "ALTERA": Проектирование устройств обработки сигналов. / М.: "Додека", 2000 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277689C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290593C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2282128C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2282127C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2258887C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277688C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2260161C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277690C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2406055C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2539728C1 |
Изобретения относятся к области разработки систем управления ракетами и могут быть использованы в противотанковых ракетных комплексах. Технический результат - повышение качества и надежности процесса наведения управляемой ракеты без изменения конструкции самой ракеты, осуществление селекции источника полезного сигнала среди возможных оптических помех, упрощение конструкции аппаратуры управления, повышение соотношения сигнал/шум и, как следствие, повышение помехозащищенности всей системы управления. Способ наведения управляемой ракеты включает старт управляемой ракеты с бортовым источником излучения, прием и фокусировку на фотоприемнике излучения фоноцелевой обстановки с источником полезного сигнала, выделение координат источника полезного сигнала, определение координат управляемой ракеты и формирование команд управления для передачи на ракету. Перед стартом управляемой ракеты в качестве программных значений запоминают изменение параметров, характеризующих отличительную особенность движения бортового источника излучения, определяют максимальное и минимальное значения параметров, характеризующих отличительную особенность движения бортового источника излучения. В процессе выделения координат бортового источника излучения определяют и запоминают параметры движения всех источников излучения, сравнивают текущие параметры движения каждого из источников излучения с программными значениями, а формирование команд управления осуществляют в соответствии с координатами изображения того источника излучения, параметры движения которого соответствуют программным и находятся между максимальным и минимальным значениями. В систему наведения управляемой ракеты, содержащую объектив, фотоприемник излучения и последовательно соединенные блок выделения координат и блок формирования команд, дополнительно введены блок задания параметров движения, последовательно соединенные блок памяти, блок определения параметров движения и блок сравнения. Причем вход объектива соединен с входом фотоприемника, первый выход которого соединен с блоком выделения координат, а второй выход соединен с блоком памяти, выход блока сравнения соединен со вторым входом блока выделения координат, а блок задания параметров движения подключен ко второму входу блока сравнения. 2 н. и 4 з.п.ф-лы, 2 ил.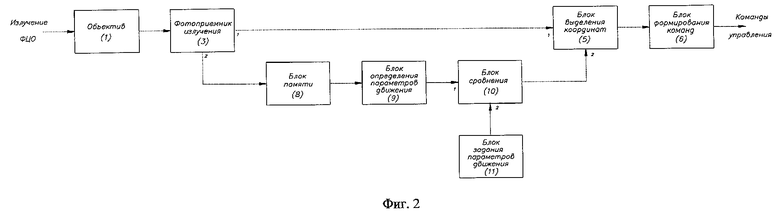
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| - М.: Военное издательство, 1975, с.11-14 | |||
| US 4027837 А, 07.06.1977 | |||
| СТОПОР ДЛЯ ОТСЕЧКИ ШЛАКА В КОНВЕРТЕРЕ | 1998 |
|
RU2148656C1 |
| ВНУТРИМАТОЧНЫЙ КОНТРАЦЕПТИВ | 1992 |
|
RU2049449C1 |
| СПОСОБ СТРЕЛЬБЫ СНАРЯДОМ И СТРЕЛЯЮЩИЙ КОМПЛЕКС | 2001 |
|
RU2210725C2 |

