Изобретение относится к вооружению, в частности к аппаратуре для наведения управляемых боеприпасов.
Известен способ (аналог) наведения управляемого боеприпаса [см., например, Сидорин В.М., Сухарь И.М., Салахов Т.Р., Понамарев В.Г. и др. Средства и системы оптико-электронного подавления. Ч. 1. - Москва: Издательство ВВИА им. проф. Н.Е. Жуковского, 2008. - С. 142-143; Антонов Д.А., Бабич P.M., Балыко Ю.П. и др. Под редакцией Федосова ЕА. Авиация ВВС России и научно-технический прогресс. Боевые комплексы и системы вчера, сегодня, завтра. - Москва: Дрофа, 2005. - С. 69-70], включающий определение координат цели, подсвет лазерным излучением области подстилающей поверхности, на которой размещена цель, захват и наведение управляемого боеприпаса по отраженному лазерному излучению от области подсвета цели на подстилающей поверхности.
Недостатком способа является высокая вероятность обнаружения лазерного излучения на объекте поражения и возможность принятия мер противодействия.
Наиболее близким по технической сущности и достигаемому техническому результату является способ наведения управляемого боеприпаса и устройство для его осуществления (прототип) [RU 2722711 С1, 03.06.2020]. Способ включает: определение координат цели, подсвет лазерным излучением области подстилающей поверхности, исключающий подсвет лазерным излучением самой цели, подсвет цели осуществляют двумя лучами, которые формируют на подстилающей поверхности находящиеся в поле зрения управляемого боеприпаса две диаметрально противоположные относительно цели области подсвета, при этом направление на цель является биссектрисой угла между двумя лазерными лучами подсвета, кроме того, после пуска управляемого боеприпаса осуществляют схождение лучей подсвета к цели с заданной угловой скоростью.
Для реализации способа прототипа подсвет цели осуществляют двумя лучами, которые формируют на подстилающей поверхности находящиеся в поле зрения управляемого боеприпаса две диаметрально противоположные относительно цели области подсвета, при этом направление на цель является биссектрисой угла между двумя лазерными лучами подсвета. Наведение управляемого боеприпаса осуществляется по центру тяжести распределения плотности энергии в соответствующем сечении отраженного лазерного излучения [ГОСТ 26086-84. Лазеры. Методы измерения диаметра пучка и энергетической расходимости лазерного излучения. - Введ. 1985-07-01. - Москва: Изд-во стандартов, 2002. - С. 4] от двух областей подсвета на подстилающей поверхности, которые расположены диаметрально противоположно относительно цели. После пуска управляемого боеприпаса непрерывно осуществляют схождение лучей подсвета к цели с заданной угловой скоростью.
Следует отметить, что при наведении управляемого боеприпаса на двухточечную цель, образованную двумя лучами, головка самонаведения управляемого боеприпаса будет сопровождать энергетический центр двухточечной цели. При одинаковой энергии излучения двух областей подсвета, диаметрально противоположных относительно цели, энергетический центр двухточечной цели будет находиться на цели в центре тяжести двух областей подсвета. Однако при различной отражательной способности подстилающей поверхности энергетика диаметрально противоположных относительно цели областей подсвета будет разной, что приведет к смещению энергетического центра двухточечной цели в направлении области подсвета с большей энергетикой [Юхно П.М. Преднамеренные оптические помехи высокоточному оружию. - Москва: Радиотехника, 2017. - С. 111]. В этом случае управляемый боеприпас начнет отклоняться от цели в зависимости от разницы энергетики двух областей подсвета, при этом, чем больше разница энергетики, тем сильнее отклонение от цели.
Кроме того, даже в условиях равнинной местности, когда отражательная способность подстилающей поверхности считается относительно одинаковой, формирование двух диаметрально противоположных относительно цели областей подсвета, которые находятся в поле зрения управляемого боеприпаса, является сложной задачей в части технической реализации. При разделении лазерного луча на два требуется поддерживать точное равенство излучаемой энергии обоих лучей, что возможно лишь с точностью не более 3-5% [Андреев А.Н., Гаврилов Е.В., Ишанин Г.Г. и др. Оптические измерения. - М.: Университетская книга; Логос, 2008. - С. 101].
Недостатком способа прототипа является низкая точность наведения управляемого боеприпаса на цель, обусловленная различной отражательной способностью в разных областях подсвета на подстилающей поверхности.
Техническим результатом данного изобретения является повышение точности наведения управляемого боеприпаса на цель при различной отражательной способности подстилающей поверхности.
Технический результат достигается тем, что в известном способе, основанном на определении координат цели, подсвете лазерным излучением области подстилающей поверхности, исключающем подсвет самой цели, согласно изобретению подсвет осуществляют одним лазерным лучом и после пуска управляемого боеприпаса производят схождение лазерного луча к цели с заданной угловой скоростью.
Сущность изобретения заключается в том, что в нем, так же как и в прототипе, определяют координаты цели, исключают подсвет лазерным излучением самой цели, но не за счет формирования двумя лучами в поле зрения управляемого боеприпаса двух областей подсвета на подстилающей поверхности, которые расположены диаметрально противоположно относительно цели, а за счет формирования одним лучом одной области подсвета, при этом после пуска управляемого боеприпаса осуществляют схождение луча подсвета к цели с угловой скоростью  , где α - угол между лазерным лучом подсвета и целью; D - дальность до цели при пуске управляемого боеприпаса; V - средняя скорость полета управляемого боеприпаса; tmin - минимальное время подсвета цели, необходимое для устойчивого наведения на нее управляемого боеприпаса на конечном участке.
, где α - угол между лазерным лучом подсвета и целью; D - дальность до цели при пуске управляемого боеприпаса; V - средняя скорость полета управляемого боеприпаса; tmin - минимальное время подсвета цели, необходимое для устойчивого наведения на нее управляемого боеприпаса на конечном участке.
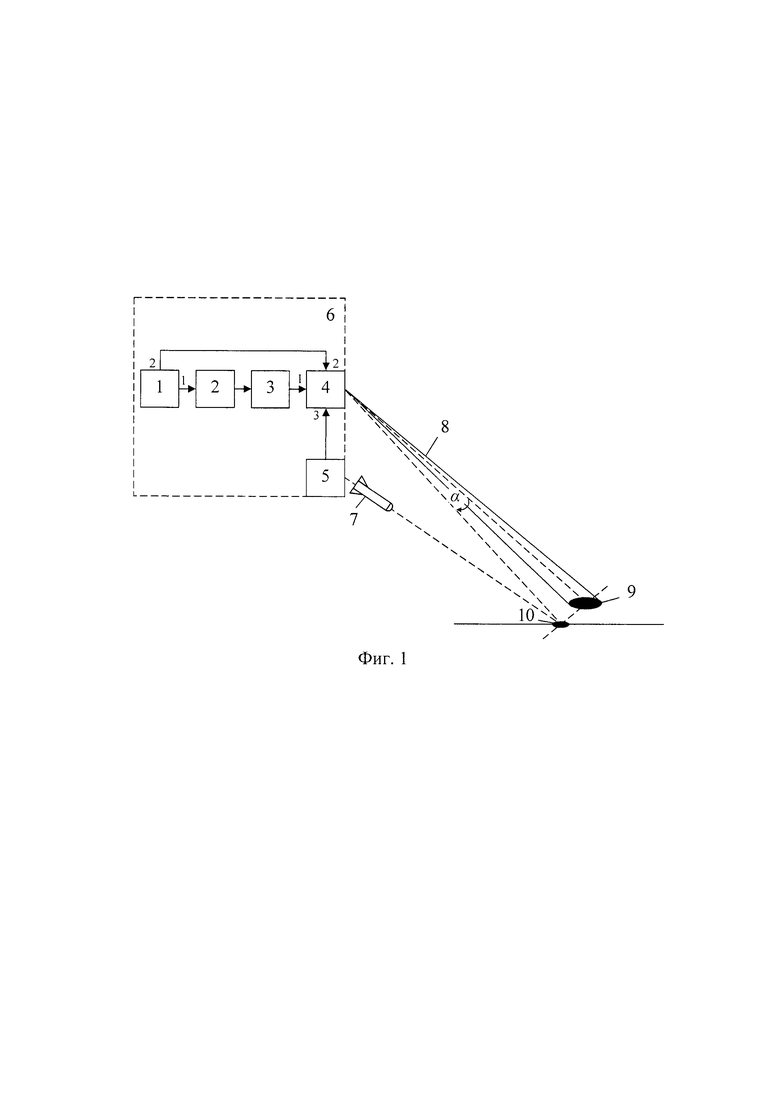
Способ может быть реализован с помощью устройства, структурная схема которого показана на фиг. 1, где обозначены: 1 - канал лазерного дальнометрирования, 2 - электронная аппаратура управления, 3 - канал лазерного целеуказания, 4 - блок формирования области подсвета, 5 - средство запуска управляемого боеприпаса, 6 - носитель, 7 - управляемый боеприпас, 8 - лазерный луч подсвета подстилающей поверхности, 9 - область подсвета подстилающей поверхности, 10 - цель.
В устройстве последовательно соединены канал лазерного дальнометрирования 1, электронная аппаратура управления 2, канал лазерного целеуказания 3, блок формирования области подсвета 4. При этом второй и третий входы блока формирования области подсвета 4 соединены со вторым выходом канала лазерного дальнометрирования 1 и с выходом средства запуска управляемого боеприпаса 5 соответственно, выход блока формирования области подсвета 4 является выходом устройства наведения управляемого боеприпаса.
Назначения элементов, представленных на фиг. 1, ясны из их названия.
Блок формирования области подсвета 4 предназначен для формирования лазерным лучом 8 пятна подсвета на подстилающей поверхности, находящегося в поле зрения управляемого боеприпаса 7, а также для осуществления схождения лазерного луча подсвета подстилающей поверхности 8 к цели 10 с угловой скоростью  после пуска управляемого боеприпаса 7. Средняя скорость полета управляемого боеприпаса V, дальность до цели при пуске управляемого боеприпаса D, угол между лазерным лучом подсвета и целью а, а также необходимое минимальное время подсвета цели 10 для устойчивого наведения на нее управляемого боеприпаса 7 введены заранее в блок формирования области подсвета 4.
после пуска управляемого боеприпаса 7. Средняя скорость полета управляемого боеприпаса V, дальность до цели при пуске управляемого боеприпаса D, угол между лазерным лучом подсвета и целью а, а также необходимое минимальное время подсвета цели 10 для устойчивого наведения на нее управляемого боеприпаса 7 введены заранее в блок формирования области подсвета 4.
Заявленное устройство работает следующим образом. После определения координат цели с первого выхода канала лазерного дальнометрирования 1 сигнал, содержащий информацию о текущей дальности до подстилающей поверхности, поступает на вход электронной аппаратуры управления 2, в которой формируется необходимый уровень плотности потока мощности (энергии) излучения в зависимости от дальности до подстилающей поверхности. Кроме того, со второго выхода канала лазерного дальнометрирования 1 на второй вход блока формирования области подсвета 4 поступает сигнал (импульс), позволяющий измерить текущую дальность до подстилающей поверхности. С выхода электронной аппаратуры управления 2 сигнал, содержащий информацию о максимальной мощности лазерного излучения, поступает на вход канала лазерного целеуказания 3, на выходе которого формируется лазерное излучение с необходимой мощностью для устойчивого наведения на цель управляемого боеприпаса на конечном участке траектории его полета. Далее излучение поступает на первый вход блока формирования области подсвета 4, в котором формируется лазерный луч подсвета подстилающей поверхности 8, находящейся в поле зрения управляемого боеприпаса в стороне относительно цели 10 и исключающей подсвет лазерным излучением самой цели. Отраженное лазерное излучение от области подсвета подстилающей поверхности 9 захватывается головкой самонаведения управляемого боеприпаса 7. После пуска управляемого боеприпаса 7 сигнал с выхода средства запуска управляемого боеприпаса 5 поступает на третий вход блока формирования области подсвета 4, в котором осуществляется процедура схождения лазерного луча подсвета подстилающей поверхности 8 к цели 10 с угловой скоростью со для повышения точности наведения управляемого боеприпаса на цель при различной отражательной способности подстилающей поверхности.
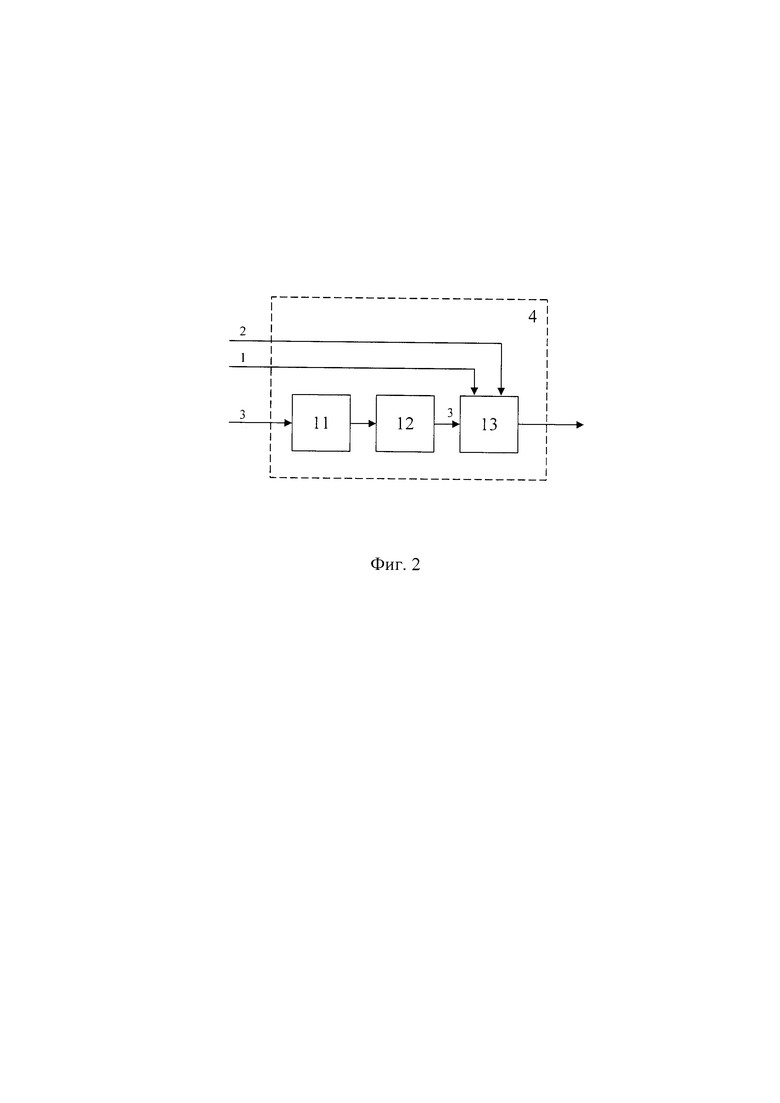
На фиг. 2 приведен вариант построения блока формирования области подсвета 4, где обозначено: 11 - устройство управления механизмом отклонения зеркала, 12 - механизм отклонения зеркала, 13 - зеркало.
Все элементы блока формирования области подсвета 4 могут быть реализованы с помощью оптических и технических элементов, выпускаемых промышленностью. Так, например, устройство управления механизмом отклонения зеркала 11 может быть реализовано в виде счетно-решающего устройства [RU 2224272 С1, 20.02.2004]. Механизм отклонения зеркала 12 может быть реализован в виде реверсивного электродвигателя, скорость и направление вращения которого регулируется путем варьирования уровнем и полярностью сигнала с выхода устройства управления механизмом отклонения зеркала 11. В качестве зеркала 13 может быть использовано, например, плоское зеркало с защитным серебряным покрытием, которое обладает отличной прочностью и высоким коэффициентом отражения в видимом и ближнем инфракрасном диапазонах длин волн [RU 2466949 С1, 20.11.2012].
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2722711C1 |
| СПОСОБ ЗАЩИТЫ ОБЪЕКТА ОТ ВЫСОКОТОЧНОГО ОРУЖИЯ С ЛАЗЕРНЫМ НАВЕДЕНИЕМ | 2024 |
|
RU2822806C1 |
| Способ наведения управляемого боеприпаса | 2016 |
|
RU2635299C1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2191406C1 |
| КОМПЛЕКС ОЦЕНКИ ПОМЕХОУСТОЙЧИВОСТИ ПОЛУАКТИВНОЙ ЛАЗЕРНОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2020 |
|
RU2753592C1 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОЗАЩИЩЕННОСТИ УПРАВЛЯЕМЫХ БОЕПРИПАСОВ С ЛАЗЕРНОЙ СИСТЕМОЙ НАВЕДЕНИЯ | 2020 |
|
RU2755592C1 |
| СИСТЕМА ПАССИВНОГО ДАЛЬНОМЕТРИРОВАНИЯ ОБЪЕКТОВ В УПРАВЛЯЕМЫХ БОЕПРИПАСАХ | 2004 |
|
RU2295103C2 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| Способ одновременного наведения управляемых ракет с лазерными полуактивными головками самонаведения и устройство для его осуществления | 2017 |
|
RU2657356C1 |
| СПОСОБ НАВЕДЕНИЯ САМОНАВОДЯЩЕГОСЯ БОЕПРИПАСА | 2022 |
|
RU2790052C1 |
Изобретение относится к вооружению, в частности к аппаратуре для наведения управляемых боеприпасов. Способ наведения управляемого боеприпаса заключается в определении координат цели, подсвете лазерным излучением области подстилающей поверхности, причем исключается подсвет лазерным излучением самой цели. При этом подсвет осуществляют одним лазерным лучом, а после пуска управляемого боеприпаса производят схождение лазерного луча к цели с заданной угловой скоростью. Технический результат – повышение точности наведения управляемого боеприпаса на цель при различной отражательной способности подстилающей поверхности. 2 ил.
Способ наведения управляемого боеприпаса, заключающийся в определении координат цели, подсвете лазерным излучением области подстилающей поверхности, при этом исключается подсвет лазерным излучением самой цели, отличающийся тем, что подсвет осуществляют одним лазерным лучом, при этом после пуска управляемого боеприпаса производят схождение лазерного луча к цели с угловой скоростью  , где α - угол между лазерным лучом подсвета и целью; D - дальность до цели при пуске управляемого боеприпаса; V - средняя скорость полета управляемого боеприпаса; tmin - минимальное время подсвета цели, необходимое для устойчивого наведения на нее управляемого боеприпаса на конечном участке.
, где α - угол между лазерным лучом подсвета и целью; D - дальность до цели при пуске управляемого боеприпаса; V - средняя скорость полета управляемого боеприпаса; tmin - минимальное время подсвета цели, необходимое для устойчивого наведения на нее управляемого боеприпаса на конечном участке.
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2722711C1 |
| СПОСОБ СТРЕЛЬБЫ СНАРЯДОМ, УПРАВЛЯЕМЫМ ПО ЛУЧУ ЛАЗЕРА, И ОПТИЧЕСКИЙ ПРИЦЕЛ СИСТЕМЫ НАВЕДЕНИЯ СНАРЯДА | 2015 |
|
RU2582308C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2017 |
|
RU2660777C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2019 |
|
RU2737634C2 |
| US 10545012 B1, 28.01.2020. | |||
