Предлагаемое изобретение относится к области обработки изображений в автоматике, технической кибернетике, системах искусственного интеллекта и метрологии, а также в технических средствах медицинской диагностики и может быть использовано при разработке систем автоматического поиска, обнаружения, селекции, распознавания и классификации объектов по их изображениям.
Из существующего уровня техники известен способ выделения признаков для распознавания изображений объектов, заключающийся в преобразовании оптических сигналов в электрические видеосигналы, дискретизации видеосигналов, разбиении изображения объектов на дискретные элементы, сканировании изображения, выделении и подсчете дискретных элементов, отличающийся тем, что сканирование по всем дискретным элементам изображения производят электронным окном в виде рамки фона, внутри которой в центре находится электронное окно изображения объекта, причем размеры окна изображения объекта соизмеримы с размерами изображения объекта, при выделении и подсчете в качестве дискретных элементов изображения объекта принимаются дискретные элементы окна изображения объекта с такими значениями электрических сигналов, которые отсутствуют среди сигналов дискретных элементов рамки фона [1].
Недостатком данного способа является низкая вероятность распознавания объектов из-за небольшого числа признаков, которые позволяет выделить данный способ из многоцветных изображений объектов, которые наиболее часто встречается в естественных условиях, а также обязательность четкой выраженности границ и стабильности структуры изображений объектов, кроме того, выделение признаков на изображениях даже естественной зашумленности и при технологических отличиях в масштабировании данным способом невозможно.
Наиболее близким к заявленному способу по технической сущности является способ выделения вектора признаков для распознавания изображений объектов, заключающийся в преобразовании оптических сигналов в электрические видеосигналы, дискретизации видеосигналов, разбиении изображения объектов на дискретные элементы, сканирование по всем дискретным элементам изображения производят электронным окном в виде рамки фона, внутри которой в центре находится электронное окно изображения объекта, причем размеры окна изображения объекта соизмеримы с размерами изображения объекта, выделение вектора признаков изображений объектов производится по изображениям объектов в различных диапазонах электромагнитного спектра, при селекции и подсчете в качестве дискретных элементов изображения объекта в каждом диапазоне электромагнитного спектра учитываются дискретные элементы окна изображения объекта с такими значениями электрических сигналов, которые отсутствуют среди сигналов дискретных элементов рамки фона в том же диапазоне электромагнитного спектра [2].
У прототипа имеются следующие основные недостатки: низкая массовость (универсальность) реализующего этот способ алгоритма; высокая ресурсоемкость вычислений; низкая эффективность из-за ограниченности выбора объектов распознавания и условий их съемки; малая вероятность распознавания объектов в реальных условиях практической реализации способа; невозможность распознавания объектов по данным об их частях. Эти недостатки определены следующими причинами:
- во-первых, использование для преобразования в качестве входных регистрируемых лишь оптических сигналов. Это обусловлено меньшими вариабельностью и стохастичностью форм и размеров изображений объектов по их реализациям именно в оптическом диапазоне [3], состоящего только из видимого и инфракрасного диапазонов электромагнитного спектра (ЭМС);
- во-вторых, высокая ресурсоемкость вычислений, вызванная необходимостью обязательного сканирования с шагом в один дискретный элемент изображения для выполнения сканирования по всем дискретным элементам изображения электронным окном в виде рамки фона, внутри которой в центре находится электронное окно изображения объекта;
- в-третьих, низкая эффективность из-за невозможности применения данного способа для распознавания объектов заранее неизвестной или нечетко выраженной, изменяемой, сложной, искаженной формы, а также при неоднородных сопутствующих фоновых образованиях, что соответствует реальным условиям съемки;
- в-четвертых, малая вероятность распознавания объектов с нечеткой выраженностью границ изображений объектов, низкой стабильностью структуры изображений объектов, при наличии их зашумленности и при технологических отклонениях в формировании и передаче интенсивностей электрических сигналов, например, из-за непреднамеренных изменений усиления аппаратуры и работы системы автоматической регулировки усиления, а также высокая чувствительность к изменению масштаба изображений и к изменению угловой ориентации объектов на изображении, что соответствует реальным условиям практической реализации способа;
- в-пятых, невозможность распознавания объектов по данным об их частях, что необходимо для сегментации или восстановления (реконструкции) объектов на изображениях.
Задачей, на решение которой направлено заявляемое изобретение, является повышение массовости (универсальности) за счет расширения области применимости предлагаемого способа по входным регистрируемым сигналам до любых сигналов из всех возможных для регистрирующих устройств диапазонов электромагнитного спектра и волн иной физической природы; уменьшение ресурсоемкости вычислений; повышение эффективности распознавания объектов заранее неизвестной или нечетко выраженной, изменяемой, сложной, искаженной формы, а также при неоднородных сопутствующих фоновых образованиях; повышение вероятности распознавания объектов с нечеткой выраженностью границ изображений объектов и низкой стабильностью структуры изображений объектов, при наличии их зашумленности и при технологических отклонениях в формировании и передаче интенсивностей электрических сигналов, а также снижение чувствительности к изменению масштаба изображений и к изменению угловой ориентации объектов на изображении; улучшение функциональных возможностей способа возможностью распознавания объектов по данным об их частях.
Поставленная задача достигается тем, что в предлагаемом изобретении в способе, заключающемся в преобразовании входных регистрируемых сигналов в электрические видеосигналы, дискретизации видеосигналов, разбиении изображения на дискретные элементы, сканирование изображения производят электронным окном, выделение вектора признаков изображений объектов производится по изображениям в различных диапазонах электромагнитного спектра, в качестве входных регистрируемых сигналов используются любые сигналы из всех возможных для регистрирующих устройств диапазонов электромагнитного спектра и волн иной физической природы, сканирование по элементам изображения производят электронным окном с шагом, равным или превышающим размеры дискретного элемента, при селекции для каждого фрагмента дешифрируемого изображения, ограниченного электронным окном, выделение вектора признаков изображений объектов производят формированием вектора невязок между, по меньшей мере, упорядоченными по величине значениями выборки интенсивностей видеосигналов этого анализируемого фрагмента дешифрируемого изображения и, по меньшей мере, упорядоченными по величине значениями интенсивностей видеосигналов заблаговременно сформированной эталонной выборки того же размера для изображения распознаваемых объектов с последующим вычислением нормы вектора невязок и сравнением ее величины со значением устанавливаемого порога, причем сканирование могут производить как последовательно, так и параллельно (многоканально), а для эталонной выборки могут использовать как изображения самих распознаваемых объектов, так и их частей.
Достигаемый технический результат (положительный эффект):
- уровня массовости (универсальности) по входным повышение регистрируемым сигналам;
- снижение ресурсоемкости вычислений;
- повышение эффективности распознавания объектов за счет снижения ограничений для выбора как самих изображений объектов, так и условий их съемки;
- повышение вероятности распознавания объектов в реальных условиях практической реализации способа;
- улучшение функциональных возможностей способа возможностью распознавания объектов по данным об их частях,
в предлагаемом изобретении обеспечивается за счет выделения вектора признаков для распознавания изображений объектов с применением указанной в формуле изобретения совокупности существенных признаков, отличительная часть которой характеризуется следующими пояснениями:
- во-первых, использование, в дополнение к оптическому диапазону ЭМС, для преобразования в качестве входных регистрируемых, любых сигналов из всех возможных для регистрирующих устройств диапазонов ЭМС и волн иной физической природы основано на выявлении степени статистических связей между используемыми выборками интенсивностей (эталонной и анализируемого фрагмента изображения) для каждого из всех возможных диапазонов ЭМС и волн иной физической природы [4, 5]. Применение всех иных сигналов кроме оптического диапазона, от акустических и используемых в медицине диапазонов для ультразвукового исследования, рентгенографии, компьютерной томографии, магнитно-резонансной томографии до специализированных средств дистанционного зондирования, например, гиперспектральных, радиолокационных и т.п. [6, 7], включая, например, средства для обнаружения подводного движения крупных морских животных [8] по сопутствующему кильватерному следу, связанных со значительной вариабельностью форм и размеров самих изображений объектов на различных реализациях изображений или фрагментов одного изображения, значительно расширяют область применимости предлагаемого изобретения. Поэтому предлагаемый способ и реализующий его алгоритм при достаточной эффективности наделены свойством повышенной массовости (универсальности) по входным регистрируемым сигналам;
- во-вторых, снижение ресурсоемкости вычислений связано с отсутствием необходимости обязательного сканирования с шагом в один дискретный элемент изображения для выполнения сканирования по всем дискретным элементам изображения электронным окном в виде рамки фона, внутри которой в центре находится электронное окно изображения объекта. При увеличении шага сканирования на размер электронного окна, например, взятого симметричным с условием сплошного покрытия, количество циклов вычислений становится обратно пропорциональным квадрату этой величины [4], что приводит к значительному уменьшению объема вычислений;
- в-третьих, повышение эффективности распознавания объектов за счет снижения ограничений для выбора как самих изображений объектов, так и условий их съемки основано на замещении у прототипа процедуры распознавания, основанной на устойчивом совпадении формы, размеров и структуры как объекта, так и сопутствующего фона, процедурой распознавания, основанной на проверке выборки интенсивностей для последовательности сканируемых фрагментов дешифрируемого изображения на статистическую однородность с эталонной выборкой интенсивностей изображения объекта. Предварительное апробирование предлагаемого способа для различных объектов, условий съемки и входных сигналов различной физической природы в созданном макете программного комплекса выявило высокую степень его робастности. Это и определяет применимость предлагаемого способа для распознавания объектов в том числе с заранее неизвестной или нечетко выраженной, изменяемой, сложной, искаженной формой, а также при неоднородных сопутствующих фоновых образованиях, что соответствует реальным условиям съемки;
- в-четвертых, реальные условия практической реализации способа выделения вектора признаков для распознавания изображений объектов в подавляющем большинстве наделены по крайней мере непреднамеренными неконтролируемыми искажениями, снижающими качество его функционирования, такими как размытие границ изображений объектов, низкая стабильность структуры изображений объектов по различным реализациям особенно при настильных углах визирования, зашумленность при формировании и передаче интенсивностей электрических сигналов, непреднамеренное изменение усиления аппаратуры или действие автоматической регулировки усиления аппаратуры, непредсказуемое изменение масштаба изображений и угловой ориентации объектов на изображении и т.п. В этих условиях наиболее предпочтительным является использование робастных статистических методов, таких как предложенный. Таким образом достигается повышение вероятности распознавания объектов в реальных условиях практической реализации предлагаемого способа;
- в-пятых, на изображениях множество протяженных объектов при их различной форме, ориентации и многообразии сопутствующих фонов имеют статистически однородную структуру (урбанизированная территория; объекты гидрографии; различные фоновые образования в том числе лесные страты; районы загрязнений и заражений; дорожно-транспортная сеть; специфические ледово-снежные образования; большеразмерные фрагменты объектов при разрушениях и катастрофах; изображения органов, их структур и образований для живых существ и т.п,). Предлагаемый способ выделения вектора признаков для распознавания изображений объектов в соответствии с эмпирическим законом распределения выборки интенсивностей их частей ввиду робастности наиболее целесообразен и для распознавания подобных указанным выше объектов по данным об их частях в интересах сегментации или восстановления (реконструкции) формы/конфигурации объектов на изображениях.
Предлагаемый способ заключается в последовательном выполнении следующих действий:
1. Формируют изображение из дискретных элементов (матрицу интенсивностей сигналов), регистрируя любые входные сигналы из всех возможных для регистрирующих устройств диапазонов ЭМС и волн иной физической природы и преобразуя их в дискретные электрические видеосигналы.
2. Производят сканирование по элементам полученного изображения электронным окном с шагом, равным или превышающим размеры дискретного элемента этого изображения. Формируют таким образом набор фрагментов дешифрируемого изображения с размерами каждого, определяемыми указанным электронным окном.
3. Для каждого полученного фрагмента дешифрируемого изображения формируют, по меньшей мере, упорядоченную по величине значений выборку интенсивностей видеосигналов
 , (1)
, (1)
где  объем выборки.
объем выборки.
1. Для каждого указанного в п. 3 анализируемого фрагмента формируют вектор невязок вида
 (2)
(2)
между полученной выборкой (1) и одинакового размера, по меньшей мере, упорядоченной по величине значений эталонной выборкой интенсивностей видеосигналов для изображения распознаваемых объектов или их частей, сформированной заблаговременно,
 . (3)
. (3)
2. Для каждого сформированного вектора невязок (2), представляющего собой вектор признаков изображений объектов, вычисляют его норму  , по меньшей мере, например, из наиболее часто употребимого семейства норм Гельдера [9, 10]
, по меньшей мере, например, из наиболее часто употребимого семейства норм Гельдера [9, 10]
 , (4)
, (4)
где  - номер для семейства норм Гельдера.
- номер для семейства норм Гельдера.
3. Селекцию каждого фрагмента для принятия положительного решения о статистической однородности независимых выборок (1) и (3) т.е. о принадлежности изображения объекта или его части этому анализируемому фрагменту дешифрируемого изображения принимают в соответствии с решающим правилом
 , (5)
, (5)
где  - устанавливаемый пороговый уровень.
- устанавливаемый пороговый уровень.
Значения могут быть нормированы по их максимальной величине для дешифрируемого изображения, при этом пороговый уровень устанавливают в диапазоне  .
.
4. Производят аналогичные пп. 1 – 6 действия для всех оставшихся фрагментов дешифрируемого изображения для распознавания объекта (объектов) или всех его частей на изображении.
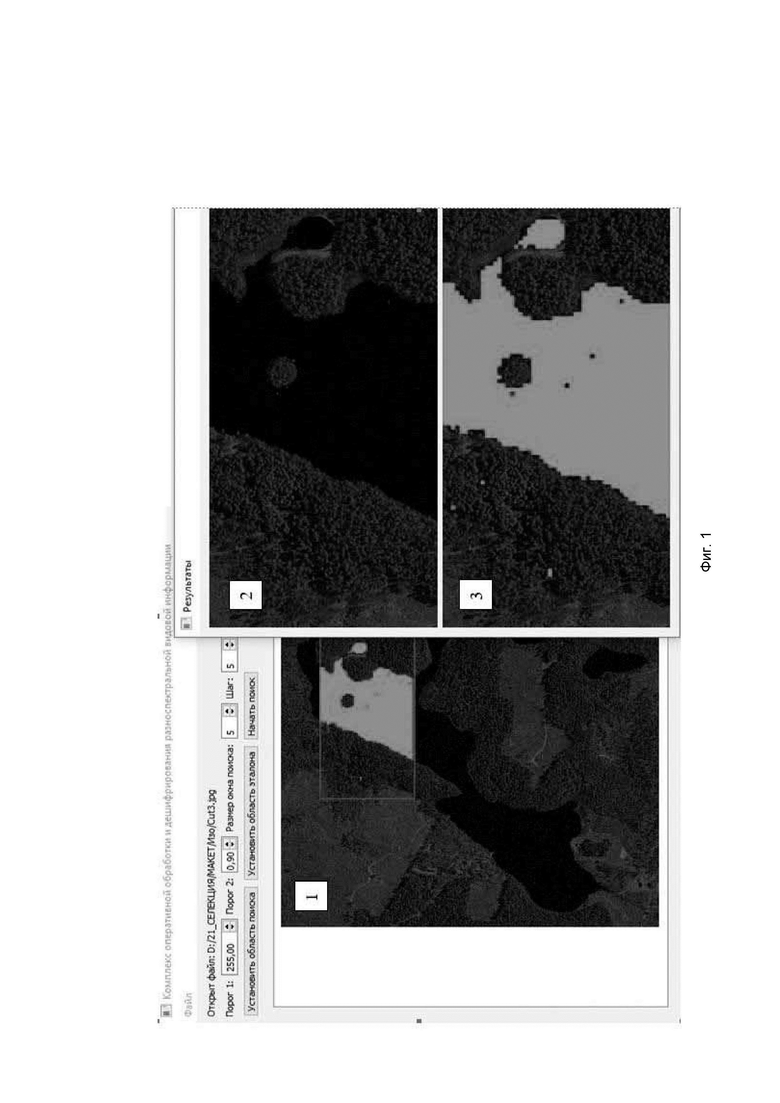
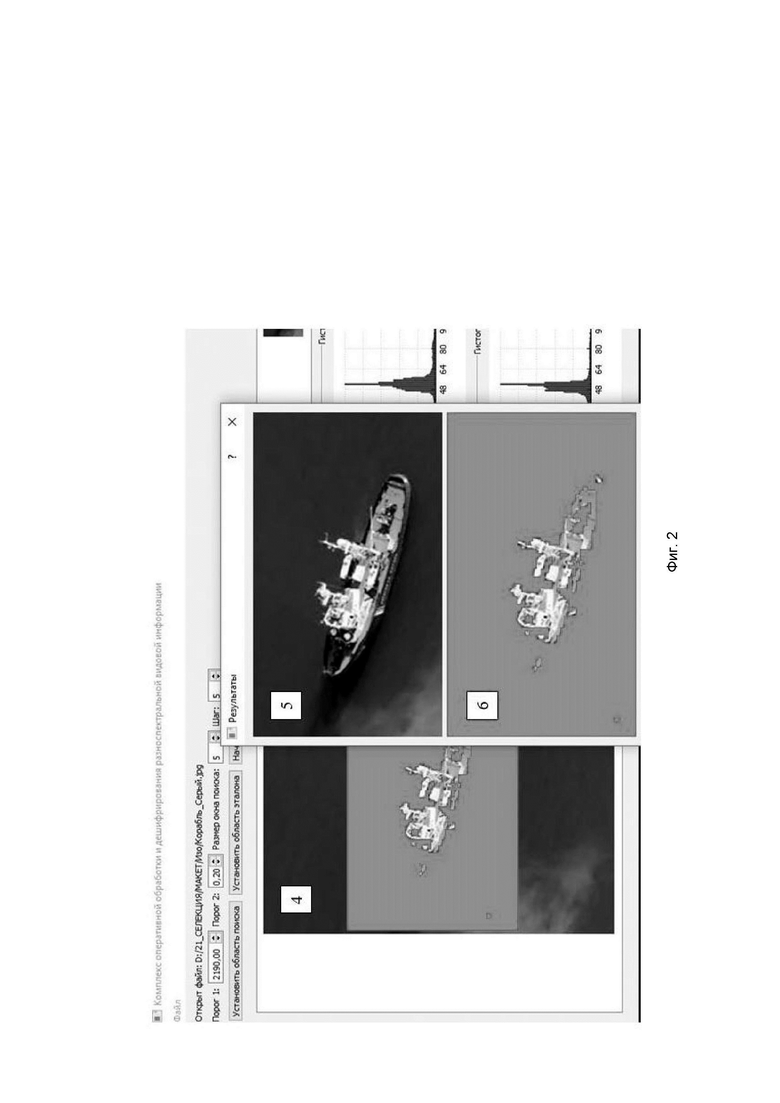
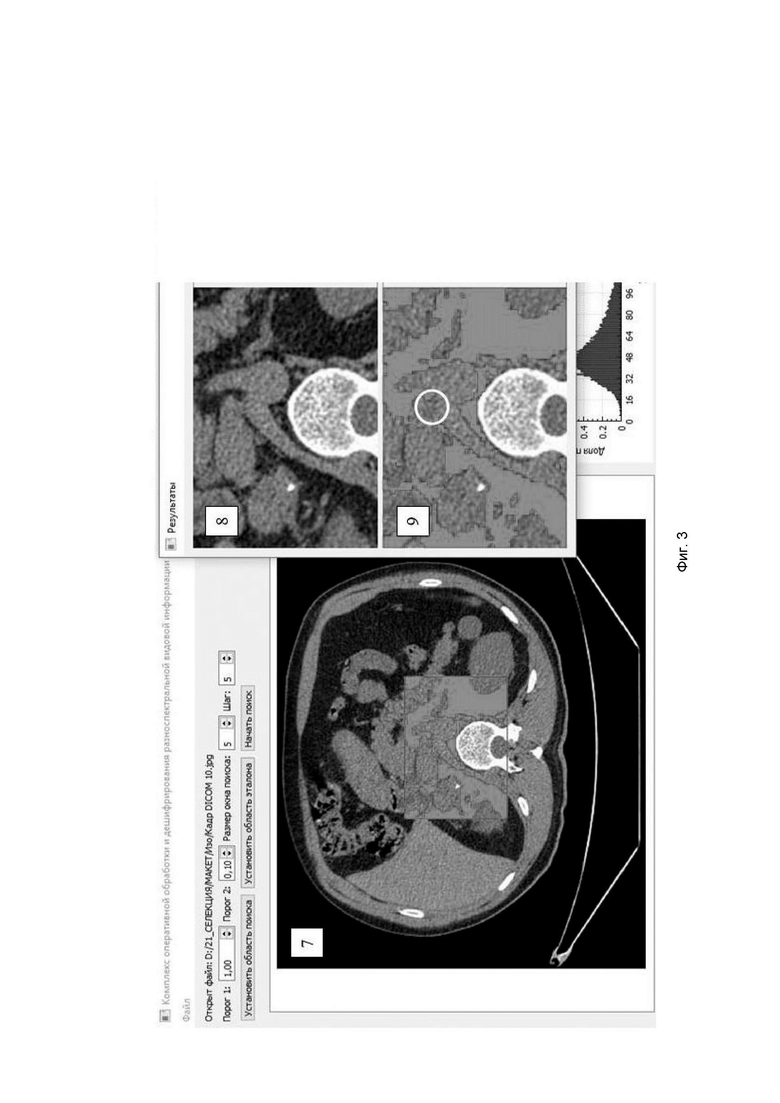
Апробирование данного технического решения на основе созданного макета его программно-алгоритмической реализации подтвердило высокую степень эффективности автоматического распознавания при выделении вектора признаков заявленным способом для любых из всех использованных входных регистрируемых сигналов (ультразвуковых; оптических; СВЧ, в том числе радиолокационных; используемых в компьютерной и магнито-резонансной томографии) дешифрируемых изображений высокой разрешающей способности. Так, в качестве иллюстраций полученных результатов, например, на фиг. 1 приведен исходный ортотрансформированный снимок радиолокационного диапазона в координатах топографической основы (часть 1), увеличенная его часть (часть 2) с результатом автоматического выделения объектов гидрографического слоя (часть 3), сформированный в интересах обновления карт; на фиг. 2 показан исходный снимок надводного объекта на неравномерном фоне морской поверхности и облаков для видимого диапазона (часть 4), увеличенная его часть (часть 5) и результат автоматического распознавания характерных частей корабля (часть 6), сформированный в интересах поиска мест кораблекрушения; на фиг. 3 представлен исходный снимок компьютерной томографии с контрастированием внутренних органов человека при предоперационном контроле (часть 7), увеличенная его часть (часть 8) и объективно подтвержденный результат автоматического распознавания прорастания новообразования к стенке брюшной аорты (часть 9, место прорастания выделено кружком).
Таким образом, использование предлагаемого способа позволяет устойчиво выделять вектор признаков распознавания изображений объектов для регистрируемых сигналов различной физической природы, эффективно обеспечивая достижение заявленного технического результата (положительного эффекта), в интересах автоматического распознавания сложных объектов в реальных условиях функционирования. С высокой степенью эффективности предлагаемый способ применим в области технических средств автоматической обработки изображений в автоматике, технической кибернетике, системах искусственного интеллекта и метрологии, а также в технических средствах объективной медицинской диагностики, для обучения и повышения квалификации обслуживающего персонала, подготовке принятия решений и объективного контроля качества их принятия.
Библиографические данные источников информации, принятые во внимание при составлении описания и формулы изобретения
1. Патент на изобретение РФ №2173880 от 20.09.2001, кл. G06К 9/46.
2. Патент на изобретение РФ №2616575 от 17.04.2017, кл. G06К 9/46, G06T 1/00, G06К 9/62.
3. Аковецкий В.Н. Дешифрирование снимков. – М.: Недра, 1983. – 373 с.
Прэтт У.К. Цифровая обработка изображений. / Пер. с англ. – М.: Мир, т. 1-2, 1982 г. – 790 с.
4. Методы компьютерной обработки изображений / под ред. В.А. Сойфера. – М.: Физматлит, 2003. – 784 с.
5. Фукунага К. Введение в статистическую теорию распознавания образов. / Пер. с англ. – М.: Наука, 1979.
6. Рожанский Д.А. Курс физики. Колебания и волны. Звук. Свет. – М.: Либроком, 2013. – 248 с.
7. Глазов Д.М., Черноок В.И., Болтунов А.Н., Мухаметов Л.М., Шпак О.В., Назаренко Е.А. Летние авиаучёты белух (Delphinapterus leucas Pall.) в Белом море в 2000, 2002 и 2005 гг. // Морские млекопитающие Голарктики. СПТБ, 2006. стр. 148-150.
8. Ланкастер П. Теория матриц. – М.: Наука, 1973. – 280 с.
9. Гантмахер Ф. Р. Теория матриц. – М.: Физматлит, 2004. – 560 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫДЕЛЕНИЯ ВЕКТОРА ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2616575C2 |
| СПОСОБ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2173880C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА С ПОСТРОЕНИЕМ КАДРА ИЗОБРАЖЕНИЯ | 2010 |
|
RU2430418C1 |
| Способ получения цифрового рентгеновского изображения | 2019 |
|
RU2721721C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2219564C2 |
| СПОСОБ ОБНАРУЖЕНИЯ АБЕРРАЦИЙ ПРИ УЛЬТРАЗВУКОВОМ ИССЛЕДОВАНИИ | 2022 |
|
RU2788389C1 |
| УСТРОЙСТВО ДЛЯ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ПРИ РАСПОЗНАВАНИИ ОБЪЕКТОВ | 2001 |
|
RU2209466C2 |
| Способ диагностирования неисправностей газотурбинных двигателей летательных аппаратов | 1989 |
|
SU1617317A1 |
| СПОСОБ ВЫЯВЛЕНИЯ ТРУДНО РАЗЛИЧИМЫХ ПРЕПЯТСТВИЙ, СПОСОБНЫХ СОЗДАВАТЬ ПОМЕХИ НИЗКОЛЕТЯЩИМ ВЕРТОЛЕТАМ И САМОЛЕТАМ | 2009 |
|
RU2437158C2 |
| Способ выделения признаков изображений картографических символов | 1987 |
|
SU1578725A1 |
Изобретение относится к области обработки изображений. Технический результат заключается в повышении универсальности способа выделения вектора признаков, уменьшении ресурсоемкости, повышении эффективности распознавания объектов, повышении вероятности распознавания объектов с нечеткой выраженностью границ, снижении чувствительности к изменению масштаба изображений и угловой ориентации объектов на изображении, а также в улучшении функциональных возможностей способа, заключающихся в распознавании объектов по данным об их частях. Способ выделения вектора признаков для распознавания изображений объектов заключается в преобразовании входных сигналов в электрические видеосигналы, их дискретизации, разбиении изображения на дискретные элементы. Сканирование изображения производят электронным окном, выделение вектора признаков изображений объектов производится по изображениям. Выделение вектора признаков изображений объектов для каждого фрагмента дешифрируемого изображения, ограниченного электронным окном, производят формированием вектора невязок между упорядоченными по величине значениями выборки интенсивностей видеосигналов анализируемого фрагмента дешифрируемого изображения и упорядоченными по величине значениями интенсивностей видеосигналов заблаговременно сформированной эталонной выборки того же размера для изображения распознаваемых объектов, вычисляют норму вектора невязок и сравнивают ее величину со значением устанавливаемого порога. 3 ил.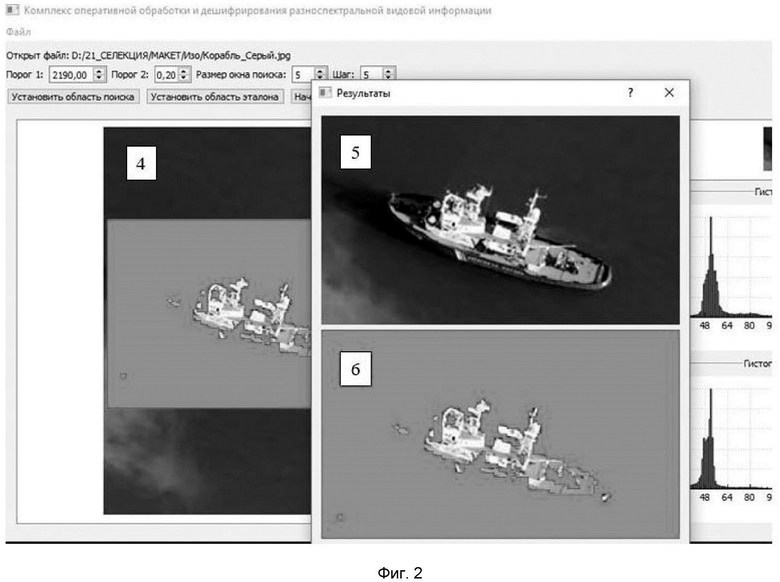
Способ выделения вектора признаков для распознавания изображений объектов, заключающийся в преобразовании входных регистрируемых сигналов в электрические видеосигналы, дискретизации видеосигналов, разбиении изображения на дискретные элементы, сканирование изображения производят электронным окном, выделение вектора признаков изображений объектов производится по изображениям, отличающийся тем, что в качестве входных регистрируемых сигналов используются, по меньшей мере, ультразвуковые, оптически, и СВЧ-сигналы, сканирование по элементам изображения производят электронным окном с шагом, равным или превышающим размеры дискретного элемента, при селекции для каждого фрагмента дешифрируемого изображения, ограниченного электронным окном, выделение вектора признаков изображений объектов производят формированием вектора невязок между, по меньшей мере, упорядоченными по величине значениями выборки интенсивностей видеосигналов этого анализируемого фрагмента дешифрируемого изображения и, по меньшей мере, упорядоченными по величине значениями интенсивностей видеосигналов заблаговременно сформированной эталонной выборки того же размера для изображения распознаваемых объектов с последующим вычислением нормы вектора невязок и сравнением ее величины со значением устанавливаемого порога, причем сканирование могут производить как последовательно, так и параллельно (многоканально), а для эталонной выборки могут использовать как изображения самих распознаваемых объектов, так и их частей.
| СПОСОБ ВЫДЕЛЕНИЯ ВЕКТОРА ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2616575C2 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2016 |
|
RU2664411C2 |
| EP 3179407 A1, 14.06.2017 | |||
| US 20110229025 A1, 22.09.2011 | |||
| US 20140149376 A1, 29.05.2014. | |||

