Способ обнаружения объекта относится к автоматике и технической кибернетике и может быть использован, например, при разработке систем автоматического анализа и классификации изображений.
При решении задач автоматического обнаружения возникает проблема выделения изображения объекта на естественном пестром фоне (земле, воздухе), когда об объекте известны лишь предельные размеры. Основной признак, отличающий изображение объекта от фона, - это форма, образуемая перепадами яркостей сигнала изображения, поэтому при анализе фоноцелевой обстановки (ФЦО) обычно учитывают два вида наиболее неблагоприятных фоновых помех:
- контрастные перепады яркостей изображения, обусловленные границами протяженных фоновых образований (например, при анализе воздушной ФЦО - кромка облака, при анализе наземной ФЦО - перепад яркостей «луг-пашня»);
- изображения фонов, по сигнатурным признакам совпадающие с изображением объекта.
Решение задачи автоматического обнаружения и распознавания объектов упрощается при использовании ИК-диапазона длин волн. В этом диапазоне, во-первых, увеличивается отношение сигнал/фон вследствие нагрева отдельных частей объектов (например, двигателей), во-вторых, происходит естественная теплопередача элементов естественного фона, по-разному нагретых, вследствие разной ориентации по отношению к Солнцу и другим источникам тепла.
Известен способ выделения признаков для распознавания изображений объектов, защищенный патентом RU №2173880 С2, опубл. 2001.09.20, заключающийся в преобразовании оптических сигналов в электрические видеосигналы, дискретизации видеосигналов, разбиении изображения объектов на дискретные элементы, сканировании изображения, выделении и подсчете дискретных элементов. Сканирование по всем дискретным элементам изображения производят электронным окном в виде рамки фона, внутри которой в центре находится электронное окно изображения объекта, причем размеры окна изображения объекта соизмеримы с размерами изображения объекта, при выделении и подсчете в качестве дискретных элементов изображения объекта принимаются дискретные элементы окна изображения объекта с такими значениями электрических сигналов, которые отсутствуют среди сигналов дискретных элементов рамки фона. Достоинством такого технического решения является то, что обработка изображения проводится без использования порога.
Недостатками указанного способа являются:
- необходимость использования априорной информации о размере объекта;
- предположение об отличии значений электрических сигналов дискретных элементов рамки фона и объекта.
Известен также способ обнаружения объекта, защищенный патентом RU №2219564 С2, опубл. 2003.07.10, заключающийся в создании кадра изображения в ИК-диапазоне, преобразовании изображения в совокупность сигналов, представляющую собой прямоугольную матрицу сигналов, дискретизации сигналов, выделении сигналов как изображения протяженной площадки, тепловая сигнатура которой определяется распределением точечных источников ИК-энергии, сканировании изображения поля зрения окном сканирования с размерами, согласованными с размерами изображения объекта, определении по площади окна сканирования количества сигналов N с разными амплитудами и выборе в качестве координат объекта координат окна сканирования с максимальной величиной N.
Достоинством указанного способа является то, что удается обнаружить объект, в том числе с меньшим контрастом, чем контраст фона, путем учета амплитудного диапазона распределения яркости деталей изображения объекта в пределах окна сканирования, размеры которого согласованы с размером объекта.
Недостатками указанного способа являются:
- ложное обнаружение в качестве объекта контрастных перепадов яркости протяженных фоновых образований,
- ложное обнаружение в качестве объекта контрастных объектоподобных фонов с меньшими размерами, чем окно сканирования.
Наиболее близким аналогом по совокупности существенных признаков к заявляемому способу обнаружения объекта является патент RU 2338222 С2, опубл. 2008.05.27, заключающийся в предварительном определении зон поиска объекта, сканировании изображения в пределах этих зон поиска окном сканирования с размерами, согласованными с размерами изображения объекта, определении по площади окна сканирования количества амплитудных интервалов N, учитывающих лишь наиболее значимые амплитудные интервалы, и выборе в качестве координат объекта координат с максимальной величиной N.
Достоинством такого решения является то, что удается обнаруживать малоконтрастные объекты практически при любых контрастах и формах фона, что обеспечивает очень большой выигрыш по отношению сигнал/фон.
Недостатками ближайшего аналога являются:
- при сканировании изображения в пределах зон поиска не исключаются целеподобные фоновые фрагменты с размерами, близкими к размерам предполагаемого объекта;
- при выборе в качестве координат объекта координат с максимальной величиной N определяются координаты прямоугольных объектов, и теряется возможность построения фактической формы объекта;
- для обнаружения малоконтрастных объектов основным ограничением данного способа является малое отношение сигнал/шум.
Признаки ближайшего аналога совпадают со следующими признаками предлагаемого изобретения: определение зон поиска, сканирование изображения в пределах этих зон поиска, определение количества амплитудных интервалов, учитывающих лишь наиболее значимые амплитудные интервалы.
Задачей, на решение которой направлено предлагаемое изобретение, является увеличение вероятности правильного обнаружения объекта.
Технический результат настоящего изобретения заключается в повышении вероятности обнаружения объекта с построением его фактической формы при более низких контрастах объекта и более высоких контрастах фона.
Заявленный технический результат достигается тем, что в способе обнаружения объекта с построением кадра изображения в ИК-диапазоне, заключающемся в предварительном определении зоны поиска объекта, преобразовании изображения в совокупность сигналов, представляющую собой матрицу сигналов, дискретизации сигналов, выделении протяженных сигналов,
- предварительную зону поиска формируют с помощью примыкающих смежных окон, центрами каждого из которых являются все точки периметра примыкающего смежного окна,
- оценивают точки объекта с помощью критериальной функции перепадов яркости,
- между точками границ вокруг центральной точки строится объект произвольной формы и строб вокруг этого объекта,
- размеры сформированного объекта контролируются ограничением размеров строба:
- по горизонтальной координате
- и(или) по вертикальной координате.
Определение предварительной зоны поиска объекта в результате предварительного определения точек границ объектов, в которой находится объектоподобное изображение, исключает ложное обнаружение в качестве объекта контрастных перепадов яркостей целеподобного фонового фрагмента, а за счет того, что при оценке диапазона яркостей точек формы объекта учитываются все интервалы яркостей объекта, исключены ошибки, при которых в качестве объекта может быть выбран фрагмент фона, например, меньших размеров, чем объект. Кроме того, при сканировании изображения в пределах зон поиска осуществляется построение объекта произвольной формы вокруг центральной точки предполагаемого объекта, что позволяет распознавать объекты на изображениях, подвергнутых аффинным преобразованиям.
Сущность предложенного технического решения поясняется чертежом, где изображен фрагмент из множества окон для определения краев объекта.
Предлагаемый способ реализуется с помощью алгоритма, отражающего этапы обработки оцифрованного видеосигнала для принятия решения об обнаружении объекта.
1. Определяют предварительные зоны поиска объектоподобного изображения.
Для этого:
1.1 Выполняют процедуру отделения координаты сигнала определяемого объекта от координаты точек окружающего фона. Вокруг текущей точки изображения (x1, у1) организуется окно 1 размером 5×5 элементов. Его периметр Р состоит из точек (хр, ур), в количестве 16 элементов. Вокруг каждой точки (Xp, Yp) организуется свое окно 2 размером 5×5 элементов с периметром Q, состоящим из точек (xq, уq), не принадлежащих окну 1.
1.2 Формируют тройки точек в составе (x1, у1), (Xp, Yp) и (xq, уq).
1.3 Формируют критериальную функцию (r1-r2) принадлежности точки (x1, у1) к границе объекта.
В зоне поиска, состоящей из периметров Р и Q, с центром фрагмента в точке (x1, у1) определяют перепады яркости
r1=U(x1, у1)-U(хр, ур) и
r2=|U(Xp, Yp)-U(xq, уq)|, где
U - яркости соответствующих точек.
Среди точек периметра Р, в которых перепад r1 принял максимальное значение, выбирается точка соответствующего периметра Q с минимальным перепадом r2.
По знаку разности (xp-х1) для горизонтали или (ур-у1) для вертикали определяют каким (начальным или конечным) краем объекта является центр фрагмента (x1, у1) с амплитудой (r1-r2).
2. Прорисовывают объект произвольной формы
2.1 Элементы изображения между левой и правой границами по строке определяют как элементы объекта. Текущая и предыдущая строки создают объект произвольной формы, если по вертикали наблюдается связность.
2.2. По минимальному значению координаты левой границы и максимальному значению координаты правой границы связного объекта произвольной формы определяют горизонтальные ребра строба. Минимальное и максимальное значение координат строк связного объекта определяют вертикальные границы строба.
В предлагаемом техническом решении для исключения из рассмотрения протяженных перепадов яркостей выделены зоны поиска объекта путем нахождения объектоподобных изображений, что достигается контролем размера строба по координате, в частности вводится блокировка (ограничение) на размер строба по максимальному значению.
Таким образом, использование предлагаемого способа, по сравнению с известными способами обнаружения объектов, позволяет повысить надежность обнаружения объектов с построением его фактической формы при локальном контрасте относительно близлежащего фона и неоднородностью тепловой поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА | 2006 |
|
RU2338222C2 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| СПОСОБ СЕЛЕКЦИИ ФРАГМЕНТА ИЗОБРАЖЕНИЯ ДЛЯ ТЕЛЕВИЗИОННЫХ КООРДИНАТОРОВ | 2006 |
|
RU2319316C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2419150C1 |
| Способ автоматического распознавания сцен и объектов на изображении | 2021 |
|
RU2778906C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ФОКУСИРОВКИ КАМЕРЫ | 2013 |
|
RU2536085C1 |
| Способы определения точки наведения оружия на изображении фоно-целевой обстановки в стрелковых тренажерах и устройство для их осуществления | 2015 |
|
RU2627019C2 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИГРЕССИИ НАДПОЧВЕННОГО ПОКРОВА В АРКТИЧЕСКОЙ ЗОНЕ | 2015 |
|
RU2588179C1 |
| СПОСОБ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ СОСТОЯНИЯ ЛИНЕЙНОЙ ЧАСТИ ПОДЗЕМНЫХ МАГИСТРАЛЬНЫХ ТРУБОПРОВОДОВ | 2013 |
|
RU2553843C2 |
Изобретение относится к способам обнаружения объекта с построением кадра изображения при разработке систем автоматического анализа и классификации изображений. Техническим результатом является повышение вероятности обнаружения объекта при более низких контрастах объекта и более высоких контрастах фона. В способе предварительно определяют зоны поиска объекта, преобразуют изображения в совокупность сигналов, представляющую собой матрицу сигналов, дискретизируют сигналы и выделяют протяженные сигналы. Предварительную зону поиска формируют с помощью примыкающих смежных окон. Центрами каждого из окон являются точки периметра примыкающего смежного окна, оценивают точки границ определяемого объекта с помощью критериальной функции перепадов яркости, при этом между точками границ вокруг центральной точки строят объект произвольной формы и строб вокруг этого объекта. Размеры сформированного объекта ограничивают размерами строба по горизонтальной и(или) вертикальной координате. 1 з.п. ф-лы, 1 ил.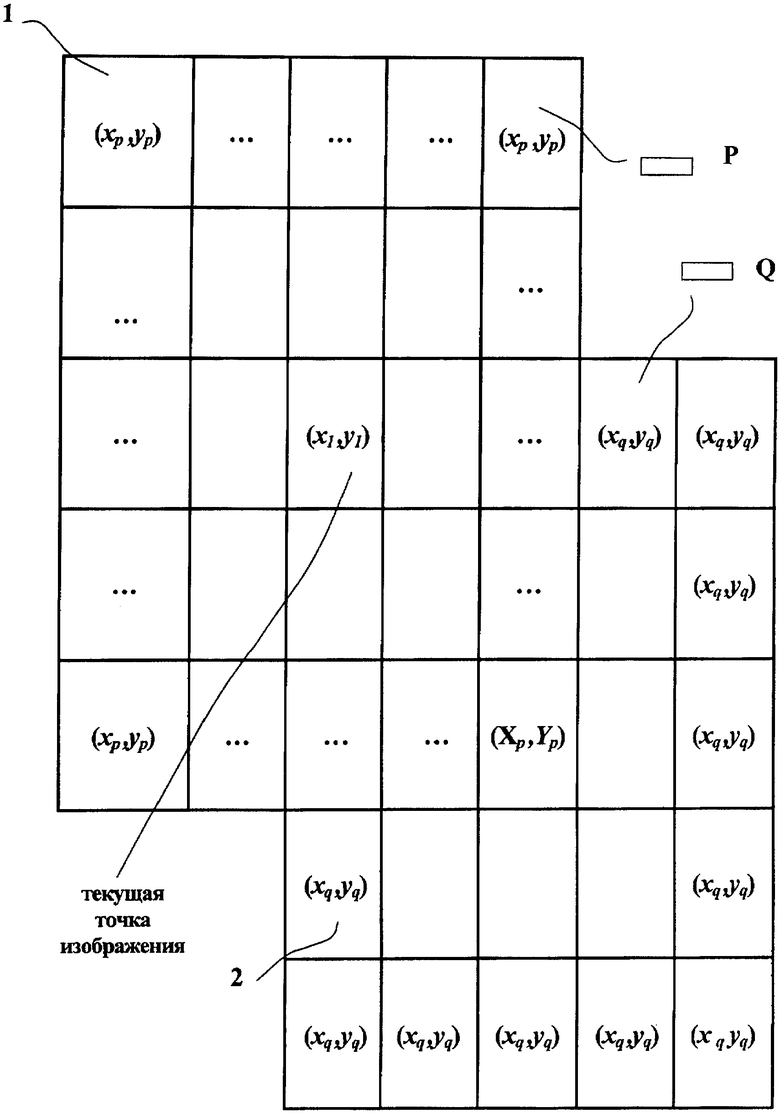
1. Способ обнаружения объекта с построением кадра изображения, например, в ИК-диапазоне, заключающийся в предварительном определении зоны поиска объекта, преобразовании изображения в совокупность сигналов, представляющую собой матрицу сигналов, дискретизации сигналов, отличающийся тем, что предварительную зону поиска формируют с помощью примыкающих смежных окон, центрами каждого из которых являются все точки периметра примыкающего смежного окна, затем оценивают точки границ объекта с помощью критериальной функции (r1-r2) перепадов яркости, формируемой по принадлежности точки (x1, y1) к границе объекта в зоне поиска, состоящей из периметров Р и Q, с центром фрагмента в точке (x1, y1) и определяют перепады яркости
r1=U(x1, y1)-U(xp, yp) и
r2=|U(Xp, Yp)-U(xq,yq)|,
где U - яркости соответствующих точек, причем среди точек периметра Р, в которых перепад яркости r1 принял максимальное значение, выбирают точку соответствующего периметра Q с минимальным перепадом r2, затем по знаку разности (xp-x1) для горизонтали или (ур-у1) для вертикали определяют каким (начальным или конечным) краем объекта является центр фрагмента (x1, y1) с амплитудой (r1-r2), при этом между точками границ вокруг центральной точки строят объект произвольной формы и строб вокруг этого объекта.
2. Способ по п.1, отличающийся тем, что размеры сформированного объекта контролируют ограничением размеров строба по горизонтальной или вертикальной координате.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ОБРАБОТКИ ИЗМЕРЕННЫХ СЧЕТНЫХ ДАННЫХ В АТС | 1992 |
|
RU2107403C1 |
| ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО ДАННЫХ И ШИНА ПРОЦЕССОРА | 1994 |
|
RU2137186C1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| JP 2004246679 A, 02.09.2004 | |||
| Огон для плетеных канатов | 1984 |
|
SU1227854A1 |
| JP 2004038593 A, 05.02.2004. | |||

