ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к способу и устройству для измерения отклонений в лобовых частях обмотки статора электрической машины.
Электрическая машина представляет собой, в частности, вращающуюся электрическую машину, такую, как синхронный генератор, подлежащий соединению с газовой или паровой турбиной (турбогенератором), или синхронный генератор, подлежащий соединению с гидротурбиной (гидрогенератором), или асинхронный генератор, либо синхронный или асинхронный электрический двигатель, или может представлять собой также электрические машины других типов.
УРОВЕНЬ ТЕХНИКИ
Электропроводные обмотки состоят из стержней-проводников для электрических катушек в электрических машинах. Эти катушки или обмотки обычно изготовлены из меди. Обмотки уложены в пазах в листах сердечников ротора или статора электрической машины. Концевые части обмоток выступают из пазов и в случае высокоэнергетических генераторов загнуты относительно основной части обмотки, заключенной в пазу. В данной заявке особое внимание уделяется лобовым частям обмоток или исключительно лобовым частям обмотки статора электрической машины. Концевые части обмотки, именуемые далее лобовыми частями обмотки либо лобовыми частями обмотки статора, имеют опору, которая несет большую массу лобовых частей обмотки, выступающих из листа сердечника статора, и придает им жесткость. Обнаружено, что опора и лобовые части обмотки вибрируют с определенными частотами во время эксплуатации. Кроме того, обнаружено, что эти вибрации могут причинять повреждения статору. Это происходит - несмотря на высокоточное изготовление всех деталей - из-за электромагнитных полей и неуравновешенностей ротора. Поэтому предложено измерять вибрации лобовых частей обмотки статора во время пробной эксплуатации и при эксплуатации в реальных условиях работы. В известных технических решениях это воплощают посредством обычных датчиков вибрации, расположенных на лобовых частях обмотки статора. Каждый из датчиков вибрации измеряет отклонение соответствующих лобовых частей обмотки. Отклонения оценивают впоследствии - в связи друг с другом. После оценки можно принять меры против отклонений по всей окружности вдоль лобовых частей обмотки статора, чтобы уменьшить отклонения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача изобретения состоит в том, чтобы разработать альтернативные способ и устройство для измерения отклонений в лобовых частях обмотки статора.
С этой целью, предложены способ измерения, измерительное устройство, и компьютерная программа для отработки способа измерения, соответствующие независимым пунктам формулы изобретения.
Дополнительные примеры изобретения описаны в зависимых пунктах формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дополнительные характеристики и преимущества станут ясными из описания предпочтительного, но не исключительного, варианта осуществления способа измерения, измерительного устройства и компьютерной программы, проиллюстрированных в качестве неограничительного примера на прилагаемых чертежах, при этом:
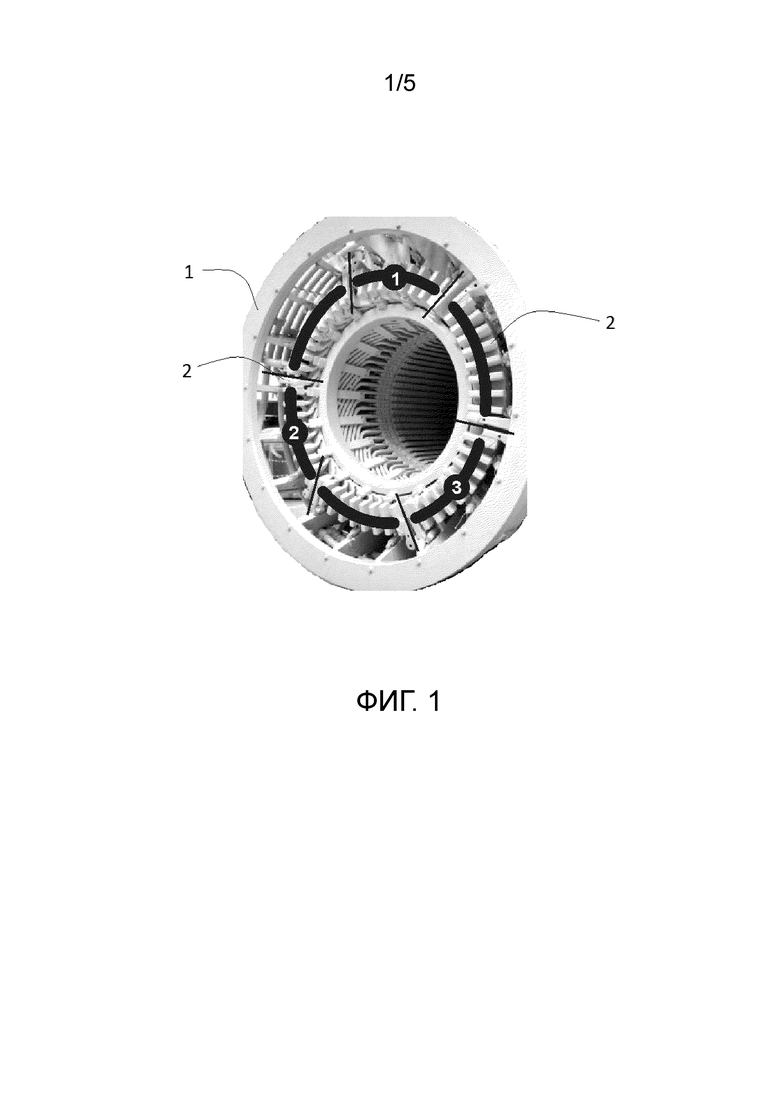
на фиг. 1 показана часть общего вида внутренности статора с лобовыми частями обмотки и подшипником, распределенного на шесть сегментов с тремя положениями для датчиков, обозначенных позициями 1, 2, 3 в заделке;
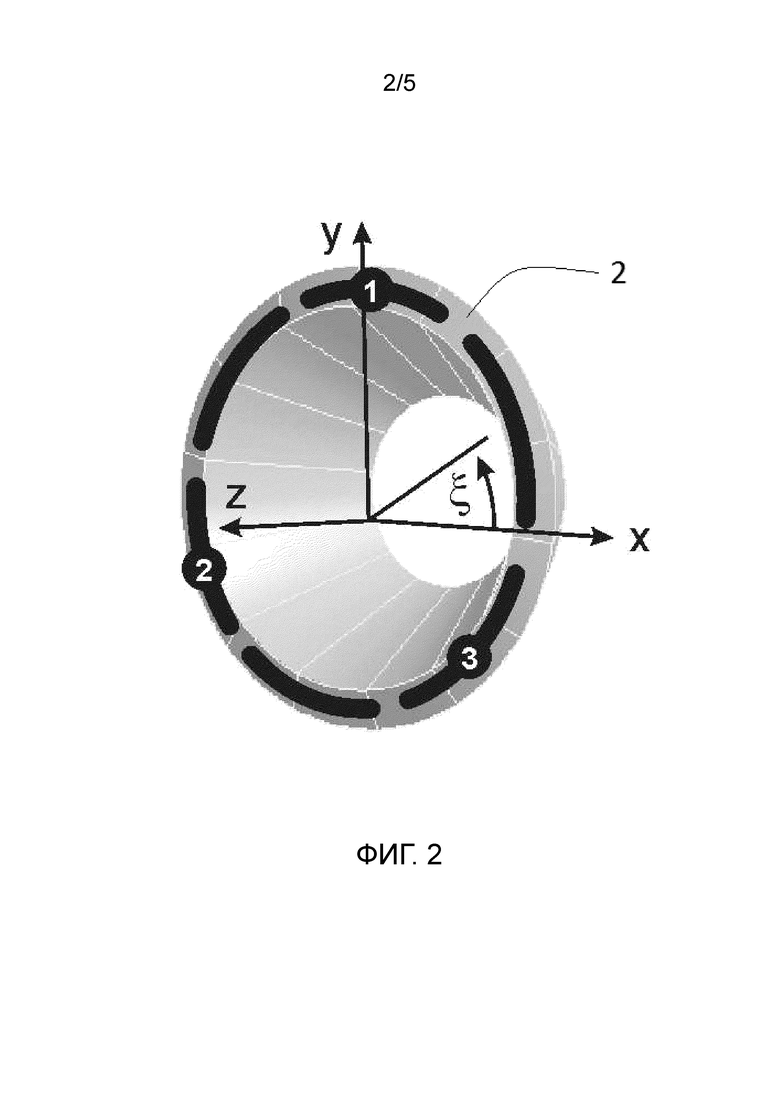
на фиг. 2 показан вид лобовых частей обмотки статора, аналогичный фиг. 1, на упрощенном схематическом изображении в форме конуса, а также показана система координат;
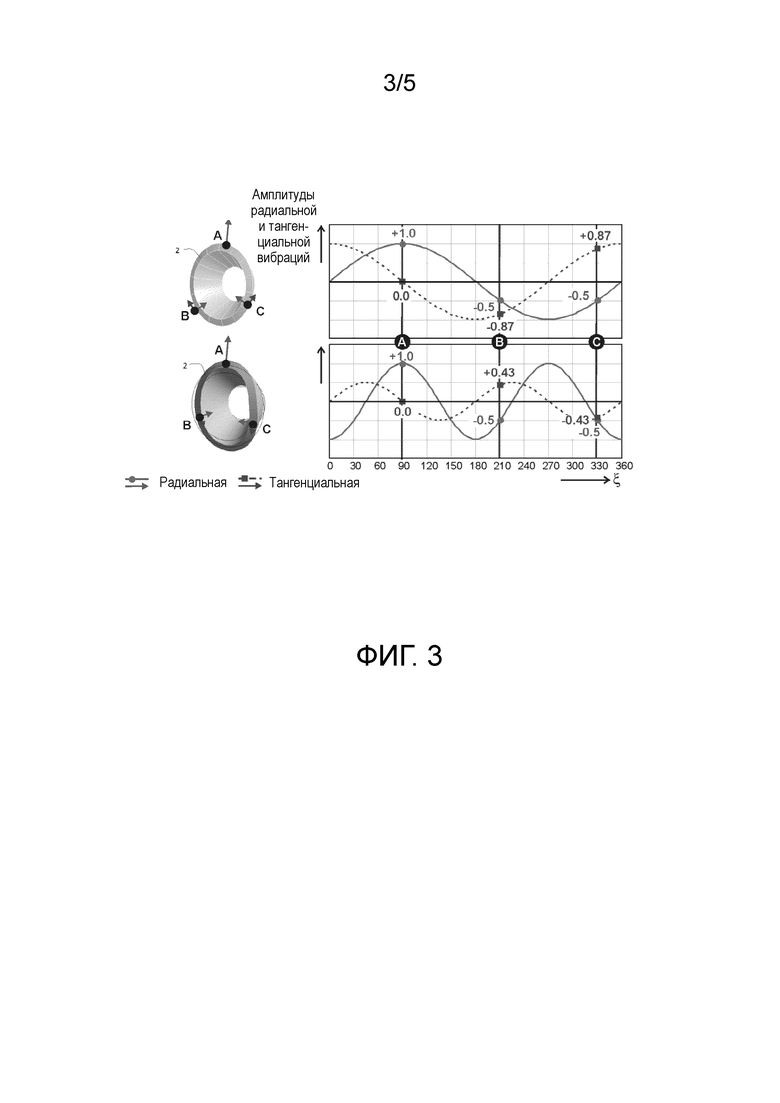
на фиг. 3 показаны два разных смещения лобовых частей обмотки статора с соответствующими диаграммами, демонстрирующими угол вдоль лобовых частей обмотки статора по оси «x» и длину смещения по оси «y» в зависимости от места вдоль лобовых частей обмотки статора, представленного углом поворота;
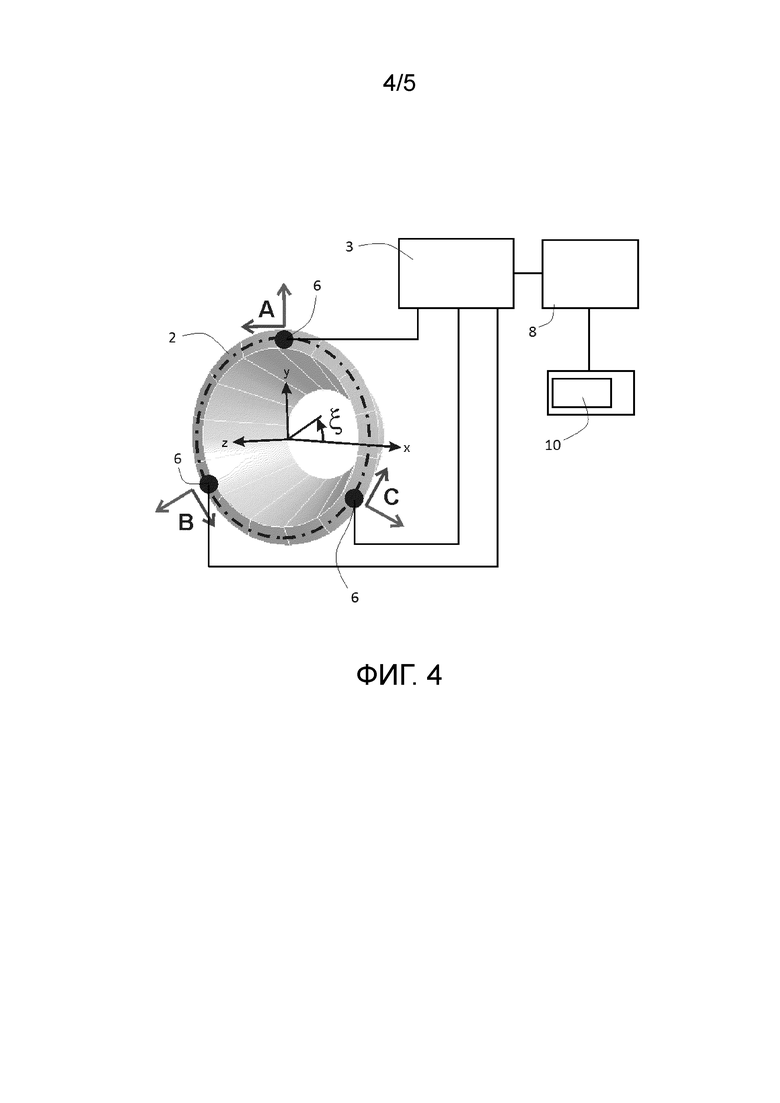
на фиг. 4 показан схематический вид лобовых частей обмотки статора, аналогичный фиг. 2, с направлениями подсчета для радиального, тангенциального и осевого смещений лобовых частей обмотки статора при работе в трех местах датчиков, а также показаны измерительное устройство для приема данных измерения и вычислительное устройство, вычисляющее смещения согласно данным измерения;
на фиг. 5 показаны две векторные диаграммы в комплексной области, при этом слева показаны измеренные совместно вращающиеся радиальный и тангенциальный векторы (фазовые векторы), а справа показаны расчетные совместно вращающиеся радиальный и тангенциальный векторы с ошибочно выведенными совместно вращающимися радиальным и тангенциальным векторами.
ПОДРОБНОЕ ОПИСАНИЕ ВОЗМОЖНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Обращаясь к чертежам, отмечаем, что здесь показаны принципы способа измерения и измерительного устройства, соответствующих примеру изобретения, при этом одинаковые позиции обозначают идентичные или соответственные части на нескольких видах.
На фиг. 1 показан общий вид части статора 1 с лобовыми частями 2 обмотки, подшипником 3, расположенным у лобовых частей 2 обмотки, и кожух 4 статора на внешней стороне статора 1. Можно заметить, что обмотка статора обычно выровнена внутри статора 1 параллельно в пазах статора 1. Термин «лобовые части 2 обмотки» относится к концевым частям обмотки, которые выступают из пазов статора 1 на обоих концах и обычно загнуты, как можно заметить на фиг. 1. Лобовые части 2 обмотки выступают изнутри статора в форме конуса, когда отдельные стержни-проводники загнуты наружу, как можно заметить на фиг. 1. Лобовые части 2 обмотки оканчиваются в проеме статора 1, где лобовые части 2 обмотки соединяются с клеммами для того, чтобы проводить электрический ток. Подробное изображение помечено линиями загиба у болтов, делящими окружность на шесть сегментов, при этом для иллюстрации положений датчиков 6 показаны три кружка, помеченные цифрами 1, 2, 3. Положения датчиков таковы, что те находятся на одинаковых расстояниях друг от друга, т.е., на расстоянии, являющемся угловым расстоянием 120°. Таким образом, позиционирование датчиков 6 таково, что они равноудалены друг от друга. Датчики 6 пригодны для измерения отклонений лобовых частей 2 обмотки статора; например, датчики 6 являются трехосными датчиками 6, которые выполнены с возможностью измерения изменений положения в радиальном и тангенциальном направлении по отношению к лобовым частям 2 обмотки статора, особенно - по отношению к концам лобовых частей 2 обмотки статора, образующим окружность.
На фиг. 2 показан вид лобовых частей 2 обмотки статора, аналогичный фиг. 1, на упрощенном схематическом изображении, при этом линии вдоль внутренности лобовых частей 2 обмотки статора иллюстрируют радиально направленные лобовые части 2 обмотки статора 1 и коническую форму лобовых частей 2 обмотки. Показана также обычная трехмерная система координат с осями «х», «y» и «z», представляющими обычные ориентации в пространстве. Угол ξ вычерчен для иллюстрации угла поворота по окружности края лобовых частей 2 обмотки статора в 2-мерном пространстве, определяемом осью «х» и осью «y», иллюстрируемых делительными линиями загиба у болтов. Отклонения лобовых частей 2 обмотки статора определяются по окружности края лобовых частей 2 обмотки статора просто в соответствии с зависимостью между траекторией, отклонением и местом вдоль окружности. На фиг. 2 отклонения не представлены, а край лобовых частей 2 обмотки образует идеальную окружность.
На фиг. 3 слева показан схематический общий вид двух лобовых частей 2 обмотки статора с разными смещениями или отклонениями от формы идеальной окружности. Слева вверху изображено отклонение в положении, обозначенном буквой А, происходящее в направлении вверх, что изображено посредством направленной вверх стрелки в положении А. В положении, обозначенном буквой В и смещенном от положения А на расстояние, соответствующее углу поворота 120°, смещение определяется радиальным направлением по одной стрелке и тангенциальным направлением по другой стрелке в связи с геометрией конуса лобовых частей 2 обмотки. То же самое можно сказать о положении, обозначенном буквой C и смещенном от положений А и В на расстояния, соответствующие углам поворота 120°. График, соответствующий трем возможным смещениям или временным деформациям, возникающим при эксплуатации электрической машины, показан справа вверху на фиг. 3 и касается смещений лобовых частей 2 обмотки статора, показанных вверху слева. Ось «y» графика показывает расстояние от нулевой деформации в начале координат, представляющее амплитуды деформаций. Ось «x» графика показывает угловое положение от 0° до 360° по окружности лобовых частей 2 обмотки статора, как описано, которое обозначено символом ξ. Положения A, B, C в лобовых частях 2 обмотки статора также обозначены на графике буквой A в точке 90°, буквой B в точке 210° и буквой C в точке 330°. Как видно на графике, радиальное смещение в положении A задается значением +1 как нормализованным размером. В положении B смещение задается значением -0,5, а в положении C смещение задается значением -0,5. Предполагаемое радиальное смещение показано на графике сплошной линией, соединяющей точки A, B, C. Смещение по всей окружности отражает предположение или интерполяцию, поскольку в этом примере смещение измеряется только в трех положениях A, B, C. Смещение в тангенциальном направлении на краю лобовых частей 2 обмотки статора показано на графике пунктирной линией. Тангенциальное направление - это направление, обозначенное стрелкой по касательной к лобовым частям 2 обмотки статора и кожуху 4 статора 1. Как можно заметить, смещение в тангенциальном направлении является нулевым в положении A, составляет -0,87 в положении B и составляет -0,5 в положении C. Эта разновидность деформации представлена формой с 2-мя узлами. При этой форме с 2-мя узлами, присутствует движение в вертикальном и/или горизонтальном направлении. Термин «узел» также определен в стандарте IEC CD 60034-23 (2015-01-23). В общем случае, в узле не измеряют деформацию в радиальном направлении. На схематическом виде лобовых частей 2 обмотки статора, смещение лобовых частей 2 обмотки статора, показанное в левой нижней части, отличается от смещения, показанного в левой верхней части. Это разное смещение иллюстрируется стрелками в разных направлениях в положениях B, C - в радиальном и тангенциальном направлении. Конус в этом примере сильнее сжат в горизонтальном направлении, чем конус, о котором шла речь выше, так что горизонтальный диаметр временно уменьшается, как можно заметить на фиг. 3. Эта разновидность деформации представлена формой с 4-мя узлами; деформация имеет два лепестка в отличие от одного лепестка у конуса, о котором шла речь выше. Форма с 4-мя узлами имеет эллиптическую деформацию передней окружности конуса, что означает радиальное движение наружу в двух диаметрально противоположных точках и радиальное движение внутрь в двух других диаметрально противоположных точках. Деформация лобовых частей 2 обмотки статора по определению состоит из форм с несколькими узлами (2-мя узлами, 4-мя узлами, 6-ю узлами, 8-ю узлами); в данном случае измеряются формы с 2-мя узлами и 4-мя узлами с соответствующими им профилями. Вследствие этого, узлы по определению не имеют деформации в радиальном направлении, а деформация измеряется относительно узлов. Измеренное в радиальном направлении смещение в примере, проиллюстрированном в нижней части рассматриваемого чертежа, идентично смещению согласно примеру, проиллюстрированному в верхней части. Радиальное смещение опять составляет +1,0, -0,5, -0,5 в положениях A, B, C, соответственно. Временные деформации в нижнем конусе происходят в вертикальном и горизонтальном направлении, т.е., край нижнего цилиндра сдвигается горизонтально и вертикально. Оба примера - для формы с 2-мя узлами и формы с 4-мя узлами - отражают типичные отклонения при эксплуатации. Посредством этого примера, соответствующего фиг. 3, поясняется, что неоднозначное смещение лобовых частей 2 обмотки статора не может быть выведено из простого замера радиального смещения. Это утверждение справедливо, по меньшей мере, для измерения в трех положениях. Измерения тангенциального смещения в примере, проиллюстрированном в нижней части рассматриваемого чертежа, показали, что оно составляет 0, +0,43, -0,43 в положениях, находящихся на угловом расстоянии 120° друг от друга и обозначенных буквами A, B, C, соответственно. Тангенциальное смещение показано на графике пунктирными линиями. Тангенциальные смещения вносят существенный вклад в полное смещение лобовых частей 2 обмотки статора. Как изображено на фиг. 3, измерение радиального смещения, проведенное в известных технических решениях и показанное сплошными линиями, не обеспечивает определение полного влияния вибраций. Путем раздельного измерения деформаций согласно верхней левой части и нижней левой части рассматриваемого чертежа выяснилось то же самое, хотя существуют разные деформации. Это приводит к неверному выводу о том, что деформации согласно двум примерам, проиллюстрированным в верхней части и нижней части рассматриваемого чертежа, одинаковы. Как описано в изобретении, добавление результатов измерения тангенциальных амплитуд и фаз к результатам измерения радиальных амплитуд и фаз гарантирует, что оператор сможет получить достаточно данных для заключения о деформациях или смещениях, происходящих на самом деле. Таким образом, изобретение обеспечивает анализ истинных форм. Следует сказать, что этот анализ истинных форм обычно можно провести лишь с применением, как правило, шести датчиков, минимум - 5-ти датчиков. Изобретение дает возможность измерять физические деформации с помощью всего трех датчиков 6. Вследствие этого, можно учесть формы деформаций с 2-мя узлами и 4-мя узлами.
На фиг. 4 показан схематический вид лобовых частей 2 обмотки статора, аналогичный фиг. 2. На лобовых частях 2 обмотки статора три датчика 6 закреплены в положениях A, B, C. Датчики 6 пригодны для измерения смещений, обуславливаемых вибрациями при эксплуатации или техническом обслуживании электрической машины. В соответствии с примером изобретения, датчики 6 измеряют смещение лобовых частей 2 обмотки статора в заданных трех положениях в радиальном направлении. Датчики 6 также измеряют смещение лобовых частей 2 обмотки статора в тангенциальном направлении. Данные измерения передаются из датчиков 6 в измерительное устройство 5, которое принимает и сохраняет эти данные. Передаваемые данные, по существу, представляют собой данные, описанные в связи с фиг. 3 и показанные на графиках. Данные измерения из измерительного устройства 5 передаются в вычислительный блок 8. В вычислительном блоке 8 хранятся справочные таблицы для сравнения данных измерения, полученных из лобовых частей 2 обмотки статора, с хранимыми эмпирическими данными. Данные, касающиеся радиального смещения, и данные, касающиеся тангенциального смещения, присваиваются алгоритмам смещения лобовых частей 2 обмотки статора. Например, это показанные в верхней части фиг. 3 данные +1,0/-0,5/-0,5 в радиальном направлении и данные 0,0/-0,87/+0,87 в тангенциальном направлении, присвоенные картине деформации, которая соответствует верхней части фиг. 3 слева. Аналогично, данные из нижней части фиг. 3, т.е., +1,0/-0,5/-0,5 в радиальном направлении и 0,0/+0,43/-0,43 в тангенциальном направлении, присваиваются картине деформации, которая соответствует нижней части слева на фиг. 3. Чтобы найти истинные (т.е., физически присутствующие) совместно вращающиеся и противоположно вращающиеся сдвиговые волны в лобовых частях 2 обмотки статора, можно использовать следующие физические характеристики.
1. Тангенциальная вибрация происходит с отставанием по фазе на 90 градусов, если для измерений вибрации используют цилиндрическую систему координат. Это означает сдвиг по фазе на -90 градусов для совместно вращающихся сдвиговых волн и на +90 градусов для противоположно вращающихся сдвиговых волн.
2. Амплитуда тангенциальной вибрации для формы с 2-мя узлами является такой же, как амплитуда радиальной вибрации, но только в другом положении. Вместе с тем, амплитуда тангенциальной вибрации составляет половину амплитуды радиальной вибрации для формы с 4-мя узлами.
Обе характеристики можно использовать для составления математических уравнений с целью выделения «истинного» содержимого в случае 2-х узлов в результате анализа формы с 2-мя узлами. Комплексные радиальный и тангенциальный векторы показаны на графике слева на фиг. 5 радиальным совместно вращающимся пространственным вектором 







Для следующих уравнений применяются ограничения, приводимые ниже.







Ниже приводится уравнение (1) для разложения совместно вращающихся пространственных векторов.

Ниже приводится уравнение (2) для разложения противоположно вращающихся пространственных векторов.

Для полученного совместно вращающегося вектора формы с 4-мя узлами применимо следующее уравнение (3).

Для полученного противоположно вращающегося вектора формы с 4-мя узлами применимо следующее уравнение (4).

Данные измерения и присвоенные картины деформации демонстрируются оператору на дисплее 10, соединенном с вычислительным блоком 8. Формат отображаемых данных можно изменять для перемещения картин, демонстрирующих окружность вокруг лобовых частей 2 обмотки статора в реальном масштабе времени, и/или для изображения данных в частотной или спектральной области. Оператор имеет возможность получать форму отклонения лобовых частей 2 обмотки статора в процессе работы.
Хотя изобретение подробно описано со ссылками на возможные варианты его осуществления, специалист в данной области техники поймет, что в рамках объема притязаний изобретения в него можно внести различные изменения и воспользоваться эквивалентами. Вышеизложенное описание предпочтительных вариантов осуществления изобретения представлено в иллюстративных и описательных целях. Его не следует считать исключительным или ограничивающим изобретение точной описанной формой, так что в свете вышеизложенных идей возможны модификации и изменения, или они могут быть получены в результате воплощения изобретения на практике. Варианты осуществления выбраны и описаны, чтобы пояснить принципы изобретения его практическое применение и дать специалисту в данной области техники возможность использовать изобретение в различных вариантах осуществления в той мере, в какой они приемлемы для предполагаемого конкретного приложения. Объем притязаний изобретения следует считать определяемым прилагаемой формулой изобретения и ее эквивалентами.
СПИСОК УСЛОВНЫХ ОБОЗНАЧЕНИЙ
1 Статор
2 Лобовые части обмотки статора
3 Подшипник
4 Кожух статора
5 Измерительное устройство
6 Датчик
8 Вычислительный блок
10 Дисплей
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для крепления лобовых частей обмотки статора электрической машины | 1990 |
|
SU1767620A1 |
| УСТРОЙСТВО И СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ВИБРАЦИИ ЛОПАТОК | 2007 |
|
RU2465562C2 |
| УСТРОЙСТВО КРЕПЛЕНИЯ ЛОБОВЫХ ЧАСТЕЙ ОБМОТКИ СТАТОРА ТУРБОГЕНЕРАТОРА | 2014 |
|
RU2550085C1 |
| ГИРОСКОПИЧЕСКИЙ ДАТЧИК И ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ВРАЩЕНИЯ, ОСНОВАННЫЙ НА ЕГО ПРИМЕНЕНИИ | 2000 |
|
RU2193753C2 |
| УЗЕЛ, СОДЕРЖАЩИЙ КОЖУХ И СТАТОР, ВСТАВЛЕННЫЙ ВНУТРЬ КОЖУХА | 2018 |
|
RU2748761C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2248524C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1978 |
|
SU1839912A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УКЛАДКИ ВОЛНОВЫХ ОБМОТОК В ШИХТОВАННЫЕ ПАКЕТЫ РОТОРОВ И СТАТОРОВ ЭЛЕКТРИЧЕСКИХ МАШИН | 2004 |
|
RU2344534C2 |
| Устройство измерения крутящего момента вала | 2022 |
|
RU2795384C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ЦИКЛИЧЕСКИХ МАШИН - МЕТАЛЛОРЕЖУЩИХ СТАНКОВ ФАЗОХРОНОМЕТРИЧЕСКИМ МЕТОДОМ | 2013 |
|
RU2561236C2 |

Изобретение относится к электротехнике. Технический результат заключается в уменьшении отклонений в лобовых частях обмотки статора. Способ измерения, устройство и вычислительный блок для измерения отклонений в лобовых частях обмотки статора электрической машины предусматривают этапы, на которых располагают датчики на лобовых частях обмотки статора в разных положениях. Измеряют вибрации и амплитуды, фазы радиальной и тангенциальной вибраций датчиками. Выводят смещения лобовых частей обмотки статора, обуславливаемые вибрациями, посредством измеренных амплитуд и/или фаз радиальной и тангенциальной вибраций. 3 н. и 1 з.п. ф-лы, 5 ил.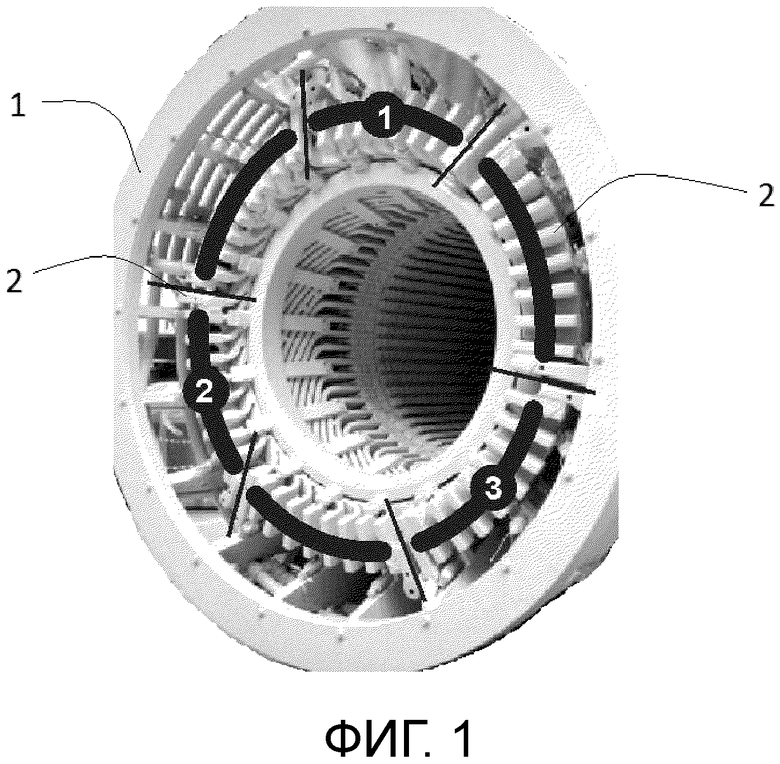
1. Способ измерения для измерения вибраций в лобовых частях (2) обмотки статора электрической машины, включающий в себя этапы, на которых:
- располагают датчики (6) на лобовых частях (2) обмотки статора в разных положениях;
- измеряют вибрации датчиками (6);
- измеряют амплитуды и фазы радиальной и тангенциальной вибраций датчиками (6);
- определяют смещения лобовых частей (2) обмотки статора, обуславливаемые вибрациями, на основании измеренных амплитуд и/или фаз радиальной и тангенциальной вибраций;
- относят упомянутые определенные смещения к форме рабочего отклонения лобовых частей (2) обмотки статора;
при этом
- формы рабочего отклонения лобовых частей (2) обмотки статора определяют с помощью вычислительного блока (8) на основании форм с двумя узлами и/или форм с четырьмя узлами.
2. Способ измерения по п. 1, отличающийся тем, что датчики (6) для измерения вибраций располагают на лобовых частях (2) обмотки статора в равноудаленных положениях.
3. Измерительное устройство (5) для измерения вибраций в лобовых частях (2) обмотки статора электрической машины, содержащее три датчика (6), расположенных в разных положениях на лобовых частях (2) обмотки статора и измеряющих амплитуды и фазы радиальной и тангенциальной вибраций, и вычислительный блок (8) для определения смещений лобовых частей (2) обмотки статора, обуславливаемых вибрациями, на основании измеренных амплитуд и/или фаз радиальной и тангенциальной вибраций,
при этом вычислительный блок (8) относит упомянутые определенные смещения к форме рабочего отклонения лобовых частей (2) обмотки статора,
и отличающееся тем, что вычислительный блок (8) определяет формы рабочего отклонения лобовых частей (2) обмотки статора на основании форм с двумя узлами и/или форм с четырьмя узлами.
4. Вычислительный блок (8), хранящий компьютерную программу, содержащую инструкции, которые при исполнении программы вычислительным блоком (8) приводят к осуществлению вычислительным блоком (8) способа измерения по п. 1.
| US 6046602A, 04.04.2000 | |||
| СПОСОБ ПОЛУЧЕНИЯ КОНСЕРВОВ "САЛАКА БЛАНШИРОВАННАЯ В ТОМАТНОМ СОУСЕ" | 2013 |
|
RU2503307C1 |
| CN 103148928 A, 12.06.2013 | |||
| JP 2004132821 A, 30.04.2004 | |||
| СПОСОБ ДИАГНОСТИРОВАНИЯ ЭЛЕКТРООБОРУДОВАНИЯ | 1996 |
|
RU2117957C1 |
| US 2014109679 A1, 24.04.2014. | |||

