ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение, в общем, относится к безопасности дорожного движения, а конкретнее, к способам и приспособлениям для управления устойчивостью велосипеда.
УРОВЕНЬ ТЕХНИКИ
Велосипедистам часто нужно прикладывать значительно большее усилие, чем прикладывают водители автомобилей, для достижения удовлетворительной устойчивости во время движения на повороте. Например, велосипедисту было нужно удерживать сведения о своей скорости, угле наклона, тормозном усилии, усилии на педали и угле поворота руля для аппроксимации устойчивости велосипеда во время движения на повороте. Это особенно критично для горных велосипедистов, которые как правило ездят по пересеченной изменчивой местности. Более того, велосипеды предлагают значительно меньшую защиту, чем другие формы транспортных средств, в случае аварии или падения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Неограничивающие и неисчерпывающие варианты осуществления настоящего изобретения описаны со ссылкой на нижеследующие фигуры, на которых одинаковые ссылочные позиции указывают на идентичные части на всех различных фигурах, если не указано иное.
Фиг. 1 - схема, изображающая примерную окружающую среду, в которой могут быть реализованы примерные варианты осуществления настоящего изобретения.
Фиг. 2 - структурная схема, изображающая примерное устройство в соответствии с вариантом осуществления настоящего изобретения.
Фиг. 3 - схема, изображающая примерный сценарий, реализующий вариант осуществления в соответствии с настоящим изобретением.
Фиг. 4 - блок-схема последовательности операций примерного процесса в соответствии с вариантом осуществления настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Нижеследующее описание ссылается на прилагаемые чертежи, которые формируют его часть, и на которых в целях иллюстрации показаны конкретные примерные варианты осуществления, в которых изобретение может быть осуществлено на практике. Эти варианты осуществления описаны достаточно подробно, чтобы предоставить специалистам в данной области техники возможность осуществить на практике концепции, раскрытые в материалах настоящей заявки, и должно быть понятно, что могут быть произведены изменения в отношении различных раскрытых вариантов осуществления, и другие варианты осуществления могут использоваться, не выходя из объема настоящего изобретения. Нижеследующее подробное описание, таким образом, не должно пониматься в ограничительном смысле.
Принимая во внимание соображения безопасности, упомянутые выше, было бы полезно иметь систему, которая предотвращает потерю устойчивости на велосипеде, тем самым, сильно снижая опасность, что велосипедист столкнется с дорогой (упадет на нее). Соответственно, настоящее изобретение предусматривает способ, устройство и систему, которые контролируют устойчивость при движении на повороте велосипеда и способны включаться в маневрирование на велосипеде для предотвращения аварий, таких как падение. Варианты осуществления настоящего изобретения могут быть реализованы на велосипедах и электрических велосипедах (также известных как электромопеды или мопеды с усилителем), а также в мотоциклах и других типах транспортных средств, которые передвигаются по поверхности дороги. Варианты осуществления настоящего изобретения могут быть воплощены или сконструированы прямо в велосипеде или в виде решения вторичного рынка.
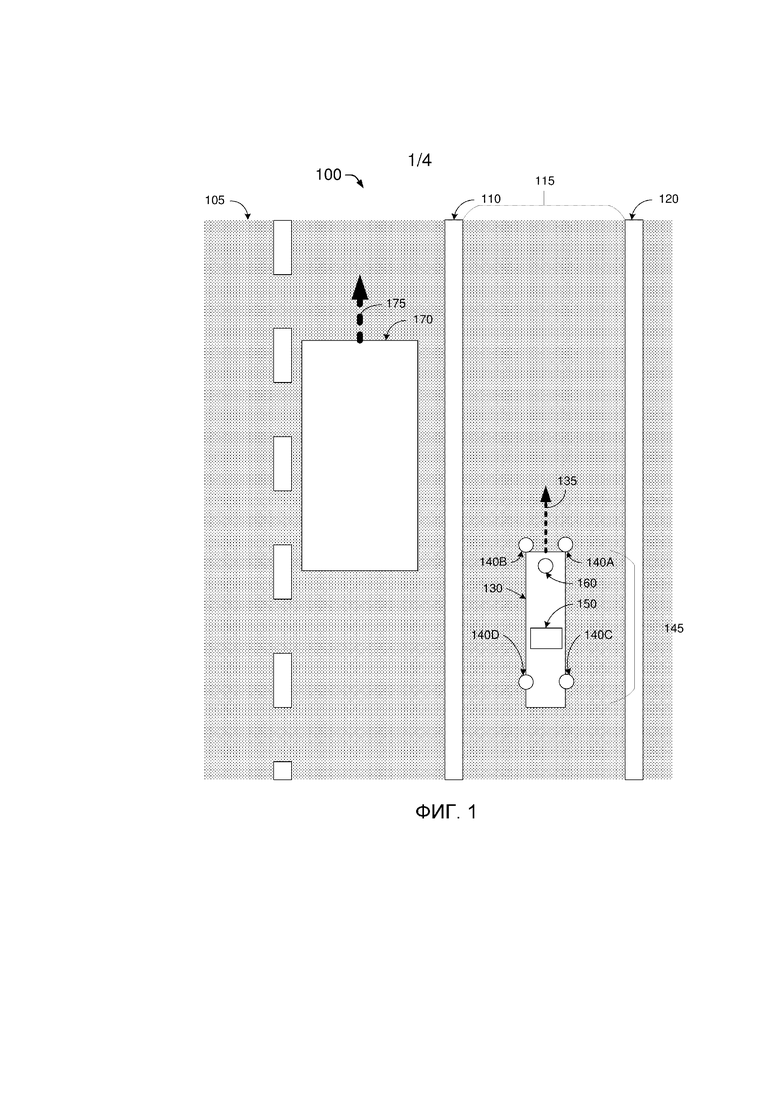
Фиг. 1 иллюстрирует примерную окружающую среду 100, в которой могут быть реализованы примерные варианты осуществления настоящего изобретения. В примерной окружающей среде 100 поверхность 105 дороги может быть предназначена для предоставления как автомобильному транспорту, так и велосипедному транспорту возможности передвигаться по ней. Одна или более линий, таких как линия 110 и линия 120, например, могут быть предусмотрены на поверхности 105 дороги для идентификации или обозначения иным образом велосипедной полосы 115 на поверхности 105 дороги. В некоторых окружающих средах поверхность 105 дороги может включать в себя одиночную линию (например, линию 110) для обозначения велосипедной полосы 115. Любая или обе из линий 110 и 120 могут быть сплошными, прерывистыми или в другой конфигурации и могут иметь любой цвет и любую текстуру. Соответственно, автомобильный транспорт, в том числе, автомобиль 170, может передвигаться по поверхности 105 дороги, в то время как велосипедный транспорт, в том числе, велосипед 130, может передвигаться в пределах велосипедной полосы 115 по поверхности 105 дороги. В примерной окружающей среде 100 велосипед 130 как правило передвигается в направлении 135, например, вперед, а автомобиль 170 как правило передвигается в направлении 175, например, вперед, аналогичном или идентичном направлению 135.
В примерной окружающей среде 100 велосипед 130 может быть оборудован системой 145 управления устойчивостью, которая, например, может включать в себя множество датчиков 140A–140D, контроллер 150 и механизм регулирования 160 устойчивости. Примечательно, что, хотя заданное количество датчиков показано на фиг. 1, то есть, четыре, в различных вариантах осуществления настоящего изобретения количество датчиков может варьироваться. Каждый из одного или более датчиков 140A–140D может быть присоединен с возможностью связи к контроллеру 150 и может включать в себя, но не в качестве ограничения, одно или более из следующего: гироскопа, измерителя ускорений, датчика углового положения рулевого управления, датчика скорости вращения колеса, датчика тормозного усилия и датчика усилия на педали. Контроллер 150 может быть выполнен с возможностью контролировать один или более параметров, имеющих отношение к движению велосипеда 130, чтобы выявлять предстоящее возникновение события, имеющего отношение к велосипеду 130, на основании контроля с использованием данных, принятых с множества датчиков 140A–140D. Рассматриваемое событие, например, может включать в себя падение велосипеда 130, обусловленное углом наклона велосипеда 130, превышающим пороговый угол. Один или более параметров, имеющих отношение к движению велосипеда 130, могут включать в себя, но не в качестве ограничения, одно или более из следующих: угла наклона велосипеда 130, скорости велосипеда 130, ускорения велосипеда 130, угла поворота велосипеда 130, скорости вращения колеса велосипеда 130, измерения тормозного усилия и измерения усилия на педали.
Механизм 160 регулирования устойчивости может быть присоединен с возможностью связи к контроллеру 150 и управляться контроллером 150. Механизм 160 регулирования устойчивости может быть выполнен с возможностью корректировать одну или более операций, имеющих отношение к движению велосипеда 130, в том числе, активное торможение велосипеда 130, для предотвращения возникновения события. В некоторых вариантах осуществления, одна или более операций, имеющих отношение к движению велосипеда 130, могут включать в себя, но не в качестве ограничения, одно или более из следующего: рулевого управления, торможения и нажатия педалей велосипеда 130. В некоторых вариантах осуществления, при коррекции одной или более операций велосипеда 130, механизм 160 регулирования устойчивости может быть выполнен с возможностью корректировать любое или оба из равновесия и скорости велосипеда 130.
Соответственно, варианты осуществления настоящего изобретения могут контролировать различные параметры, имеющие отношение к движению велосипеда 130, чтобы определять, может ли быть потеряна устойчивость при движении на повороте велосипеда 130, например, вследствие избыточного угла наклона велосипеда 130, и корректировать одну или более операций, имеющих отношение к движению велосипеда 130, для предотвращения потери устойчивости велосипеда 130. Таким образом, варианты осуществления настоящего изобретения помогали бы велосипедисту предотвращать потерю устойчивости и падение велосипеда 130. Преимущественно, это крайне улучшало бы безопасность велосипедиста.
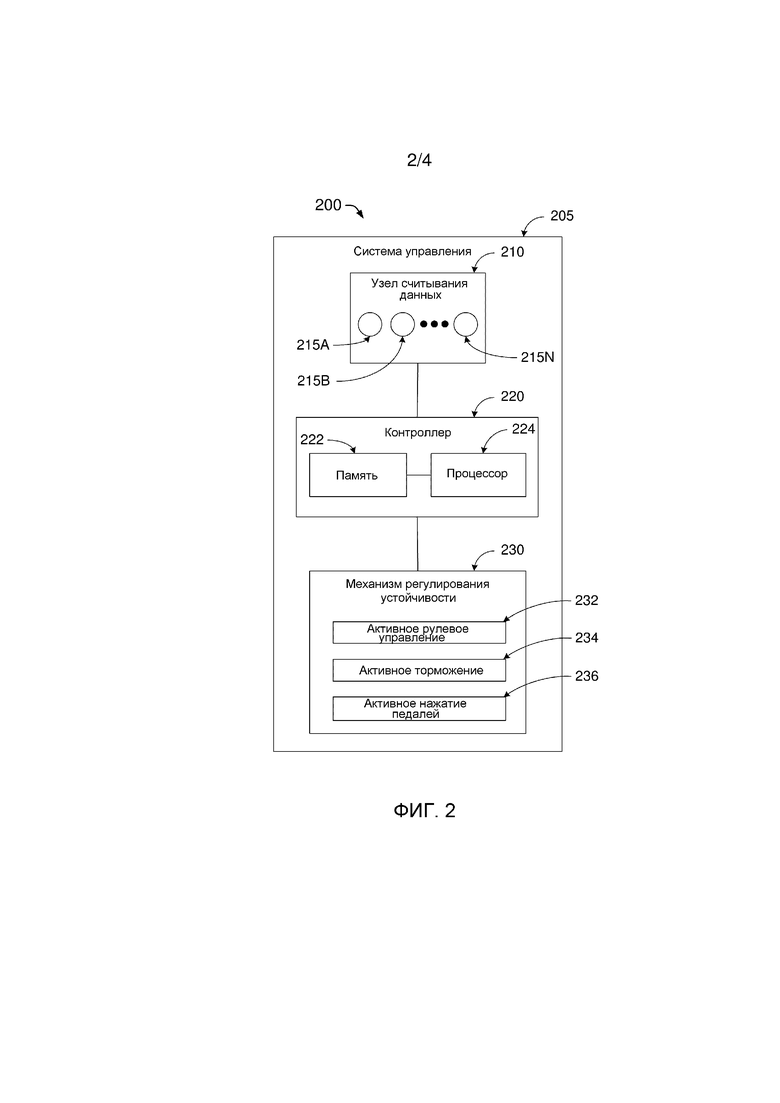
Фиг. 2 иллюстрирует примерное устройство 200 в соответствии с вариантом осуществления настоящего изобретения. Примерное устройство 200 может включать в себя систему 205 управления, которая может включать в себя узел 210 считывания данных, контроллер 220 и механизм 230 регулирования устойчивости. Узел 210 считывания данных может включать в себя некоторое количество датчиков 215A–215N, где N - положительное целое число, большее, чем 1. Примерное устройство 200 может быть реализовано в примерной среде 100 и может быть установлено на велосипеде, таком как велосипед 130. То есть, датчики 215A–215N могут быть реализацией датчиков 140A–140D, контроллер 220 может быть реализацией контроллера 150, а механизм 320 регулирования устойчивости может быть реализацией механизма 160 коррекции рулевого управления. Система 205 управления может быть установлена на велосипеде, например, велосипеде 130, и выполнена с возможностью выявлять предстоящее возникновение события, имеющего отношение к велосипеду. Система 205 управления также может быть выполнена с возможностью корректировать одну или более операций из множества операций, имеющих отношение к движению велосипеда, в том числе, торможение велосипеда, для предотвращения возникновения события.
В некоторых вариантах осуществления, при выявлении предстоящего возникновения события, имеющего отношение к велосипеду, система 205 управления может выполнять некоторое количество операций. Например, система 205 управления может контролировать один или более параметров, имеющих отношение к движению велосипеда, и определять, что возникновение события, имеющего отношение к велосипеду, является неизбежным, на основании контроля. Например, событие может быть падением велосипеда, обусловленным углом наклона велосипеда, превышающим пороговый угол. В некоторых вариантах осуществления, при контроле одного или более параметров, имеющих отношение к движению велосипеда, система 205 управления может контролировать одно или более из угла наклона велосипеда, скорости велосипеда, ускорения велосипеда, угла поворота велосипеда, скорости вращения колеса велосипеда, измерения тормозного усилия и измерения усилия на педали. Более того, система 205 управления может использовать датчики 215A–215N узла 210 считывания данных для выполнения контроля.
Датчики 215A–215N, например, могут включать в себя один или более из следующих: гироскопа, измерителя ускорений, датчика углового положения рулевого управления, датчика скорости вращения колеса, датчика тормозного усилия и датчика усилия на педали. Гироскоп и измеритель ускорений могут использоваться для измерения динамики велосипеда, в том числе, но не в качестве ограничения, угла наклона и скорости движения на повороте велосипеда во время маневрирования. Датчик углового положения рулевого управления может использоваться для измерения угла поворота велосипеда. Датчик тормозного усилия может использоваться для измерения величины усилия, прикладываемого велосипедистом при торможении велосипеда. Датчик скорости вращения колеса может использоваться для измерения скорости вращения по скорости вращения колеса велосипеда. Датчик усилия на педали может использоваться для измерения величины усилия, прикладываемого велосипедистом при нажатии педалей велосипеда. Датчик скорости вращения колеса и датчик тормозного усилия также могут использоваться для предоставления информации о тяговом усилии, которая помогала бы поддержанию устойчивости велосипеда и дополнительно повышала бы надежность системы 205 управления. Каждый из датчиков 215A–215N может выводить необработанные или обработанные данные, указывающие или иным образом представляющие соответственный считанный или измеренный параметр(ы). Термин «необработанные данные» в материалах настоящей заявки относится к данным, не обработанным перед выводом. Например, считанная информация может выводиться в виде аналоговых сигналов, например, в форме электрического тока и/или напряжения, представляющего считанную информацию. Термин «обработанные данные» в материалах настоящей заявки относится к данным, обрабатывавшимся перед выводом, например, в цифровой форме. Например, считанная информация может находиться в аналоговой форме и может обрабатываться и выводиться в цифровой форме.
Контроллер 220 может быть присоединен с возможностью связи к узлу 210 считывания данных, например, беспроводным образом или через один или более проводов, чтобы принимать необработанные или обработанные данные с датчиков 215A–215N. Контроллер 220 может включать в себя память 22 и процессор 224, присоединенный к памяти 222. Память 222 может быть выполнена с возможностью хранить данные, например, необработанные или обработанные данные, принятые из узла 210 считывания данных, а также один или более наборов исполняемых процессором команд. По меньшей мере один из одного или более наборов команд может быть исполняемым процессором 224 для контроля одного или более параметров, имеющих отношение к движению велосипеда, чтобы выявлять предстоящее возникновение события, имеющего отношение к велосипеду, на основании контроля, например, такого как падение велосипеда, обусловленное углом наклона велосипеда, превышающим пороговый угол. Например, процессор 224 может контролировать одно или более из угла наклона велосипеда, скорости велосипеда, ускорения велосипеда, угла поворота велосипеда, скорости вращения колеса велосипеда, измерения тормозного усилия и измерения усилия на педали, с помощью датчиков 215A–215N узла 210 считывания данных. По выявлению предстоящего возникновения события, процессор 224 может выводить один или более командных сигналов для коррекции маневрирования велосипедом.
Механизм 230 регулирования устойчивости может включать в себя механизм 232 активного рулевого управления. По выбору, механизм 230 регулирования устойчивости также может включать в себя механизм 234 активного торможения. Кроме того, по выбору, механизм 230 регулирования устойчивости дополнительно может включать в себя механизм 236 активного нажатия педалей. Механизм 230 регулирования устойчивости может принимать один или более командных сигналов из процессора 224 контроллера 220, чтобы корректировать одну или более операций, имеющих отношение к движению велосипеда, в том числе, торможение велосипеда, для предотвращения возникновения события. При коррекции одной или более операций, имеющих отношение к движению велосипеда, система 205 управления может быть выполнена с возможностью выполнять некоторое количество операций, в том числе, но не в качестве ограничения: (1) идентификацию по меньшей мере одной операции из множества операций, имеющих отношение к движению велосипеда, для коррекции; (2) определение величины коррекции для применения к по меньшей мере одной операции; (3) применение определенной величины коррекции к по меньшей мере одной операции; (4) контроль результата коррекции по меньшей мере одной операции; (5) определение, требуется ли дополнительная коррекция для по меньшей мере одной операции, или нужно ли, чтобы корректировалась по меньшей мере одна другая операция из множества операций, имеющих отношение к движению велосипеда; (6) применение системой управления дополнительной коррекции к по меньшей мере одной операции в ответ на определение, что требуется дополнительная коррекция для по меньшей мере одной операции, или коррекцию по меньшей мере одной другой операции в ответ на определение, что нужно, чтобы корректировалась по меньшей мере одна другая операция.
По приему командного сигнала из процессора 224, механизм 232 активного рулевого управления может корректировать угол поворота велосипеда. Например, когда процессор 224 выявляет предстоящее падение велосипеда посредством измерения угла наклона, например, угла наклона, велосипеда, превышающего пороговый угол, процессор 224 может выводить командный сигнал в механизм 232 активного рулевого управления, чтобы корректировать равновесие велосипеда с помощью активного рулевого управления. По приему командного сигнала из процессора 224, механизм 234 активного торможения может корректировать торможение велосипеда. Например, когда процессор 224 выявляет предстоящее падение велосипеда, обусловленное чрезмерной скоростью при движении на повороте, процессор 224 может выводить командный сигнал в механизм 234 активного торможения для коррекции торможения велосипеда, чтобы прикладывать тормозную силу к одному или обоим колесам велосипеда для снижения скорости велосипеда. По приему командного сигнала из процессора 224, механизм 236 активного нажатия педалей может корректировать нажатие педалей велосипеда. Например, когда процессор 224 выявляет предстоящее падение велосипеда, обусловленное недостаточной скоростью, процессор 224 может выводить командный сигнал в механизм 236 активного нажатия педалей для коррекции нажатия педалей велосипеда, чтобы повышать скорость велосипеда. В некоторых вариантах осуществления, процессор 224 может выводить командные сигналы в механизм 230 регулирования устойчивости, чтобы корректировать один из двух или оба из равновесия и скорости велосипеда.
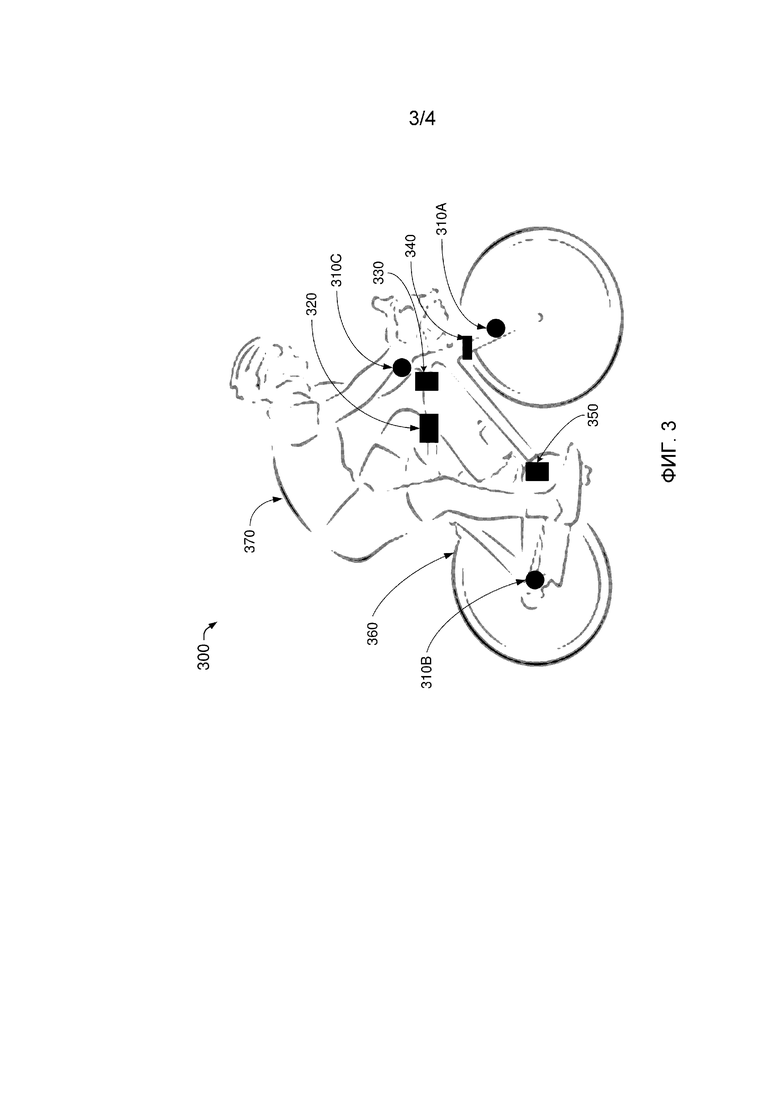
Фиг. 3 - схема, изображающая примерный сценарий 300, реализующий вариант осуществления в соответствии с настоящим изобретением. В примерном сценарии 300, велосипедист 370 едет на велосипеде 360, который оборудован вышеупомянутой системой активного управления устойчивостью. Система активного управления устойчивостью может быть встроенным решением или решением вторичного рынка. В первом случае, комбинация велосипеда 360 и системы активного управления устойчивостью может рассматриваться в качестве устройства. Система активного управления устойчивостью может включать в себя некоторое количество датчиков 310A–310C, контроллер 320 и механизм регулирования устойчивости, который может включать в себя один или более из механизма 330 активного рулевого управления, механизма 340 активного торможения и механизма 350 активного нажатия педалей. Примерный сценарий 300 может быть одной из различных реализаций примерной среды 100 и примерного устройства 200, и может быть установлен на велосипеде, таком как велосипед 130. То есть, датчики 310A–310C могут быть реализацией датчиков 140A–140D и/или 215A–215N, контроллер 320 может быть реализацией контроллера 150 и/или 220, а механизм регулирования устойчивости может быть реализацией механизма 160 и/или 230 регулирования устойчивости. В частности, механизм 330 активного рулевого управления может быть реализацией механизма 232 активного рулевого управления, механизм 340 активного торможения может быть реализацией механизма 234 активного торможения, а механизм 350 активного нажатия педалей может быть реализацией механизма 236 активного нажатия педалей.
Датчики 310A–310C, например, могут включать в себя один или более из следующих: гироскопа, измерителя ускорений, датчика углового положения рулевого управления, датчика скорости вращения колеса, датчика тормозного усилия и датчика усилия на педали. Гироскоп и измеритель ускорений могут использоваться для измерения динамики велосипеда, в том числе, но не в качестве ограничения, угла наклона и скорости движения на повороте велосипеда во время маневрирования. Датчик углового положения рулевого управления может использоваться для измерения угла поворота велосипеда. Датчик тормозного усилия может использоваться для измерения величины усилия, прикладываемого велосипедистом при торможении велосипеда. Датчик скорости вращения колеса может использоваться для измерения скорости вращения по скорости вращения колеса велосипеда. Датчик усилия на педали может использоваться для измерения величины усилия, прикладываемого велосипедистом при нажатии педалей велосипеда. Датчик скорости вращения колеса и датчик тормозного усилия также могут использоваться для предоставления информации о тяговом усилии, которая помогала бы поддержанию устойчивости велосипеда и дополнительно повышала бы надежность системы активного управления устойчивостью. Каждый из датчиков 310A–310C может выводить необработанные или обработанные данные, указывающие или иным образом представляющие соответственный считанный или измеренный параметр(ы).
Контроллер 320 может быть присоединен с возможностью связи к датчикам 310A–310C, например, беспроводным образом или через один или более проводов, чтобы принимать необработанные или обработанные данные с датчиков 310A–310C. Контроллер 320 может контролировать один или более параметров, имеющих отношение к движению велосипеда 360, для выявления предстоящего возникновения события, имеющего отношение к велосипеду 360, на основании контроля, например, такого как падение велосипеда 360, обусловленное углом наклона велосипеда 360, превышающим пороговый угол. Например, контроллер 320 может контролировать одно или более из угла наклона велосипеда 360, скорости велосипеда 360, ускорения велосипеда 360, угла поворота велосипеда 360, скорости вращения колеса велосипеда 360, измерения тормозного усилия и измерения усилия на педали с помощью датчиков 310A–310C. По выявлению предстоящего возникновения события, контроллер 320 может выводить один или более командных сигналов для коррекции маневрирования велосипедом 360.
По приему командного сигнала из контроллера 320, механизм 330 активного рулевого управления может корректировать угол поворота велосипеда 360. Например, когда контроллер 320 выявляет предстоящее падение велосипеда 360 посредством измерения угла наклона, например, угла наклона, велосипеда 360, превышающего пороговый угол, контроллер 320 может выводить командный сигнал в механизм 330 активного рулевого управления, чтобы корректировать равновесие велосипеда с помощью активного рулевого управления. По приему командного сигнала из контроллера 320, механизм 340 активного торможения может корректировать торможение велосипеда 360. Например, когда контроллер 320 выявляет предстоящее падение велосипеда 360, обусловленное чрезмерной скоростью при движении на повороте, контроллер 320 может выводить командный сигнал в механизм 340 активного торможения для коррекции торможения велосипеда 360, чтобы прикладывать тормозную силу к одному или обоим колесам велосипеда 360 для снижения скорости велосипеда 360. По приему командного сигнала из контроллера 320, механизм 360 активного нажатия педалей может корректировать нажатие педалей велосипеда 360. Например, когда контроллер 320 выявляет предстоящее падение велосипеда 360, обусловленное недостаточной скоростью, контроллер 320 может выводить командный сигнал для ввода в действие механизма 360 активного нажатия педалей, чтобы корректировать нажатие педалей велосипеда 360 для повышения скорости велосипеда 360. В некоторых вариантах осуществления, контроллер 320 может выводить командные сигналы для коррекции любого или обоих из равновесия и скорости велосипеда 360.
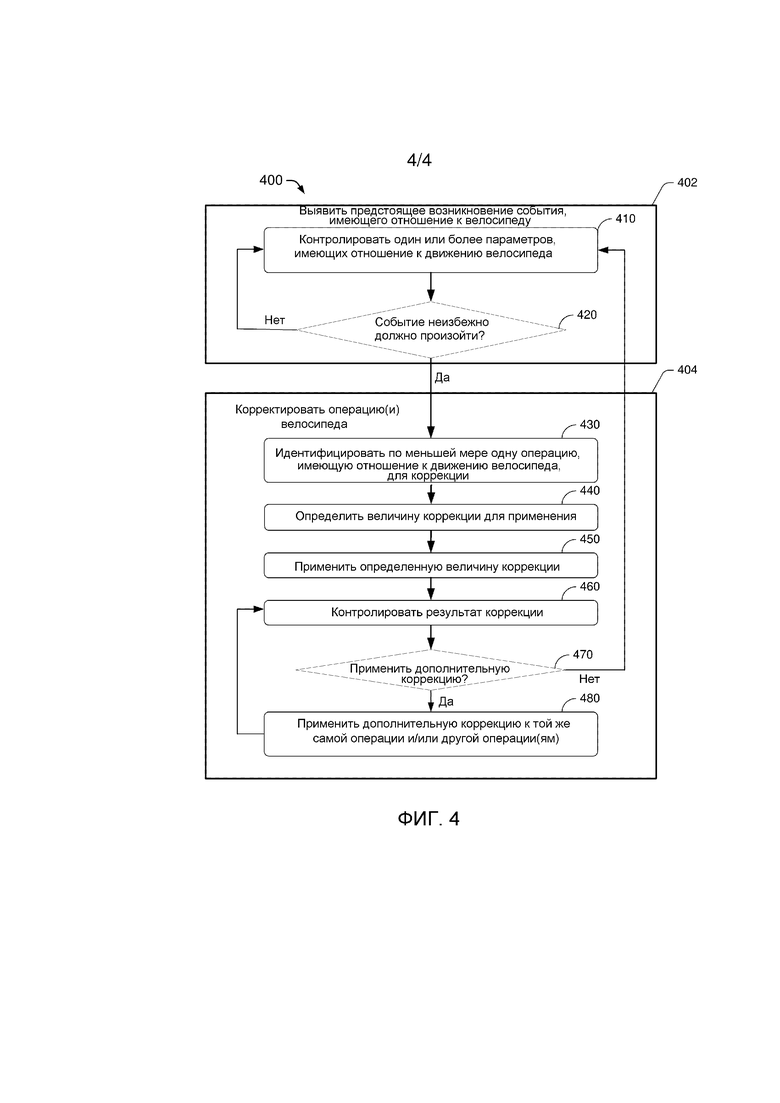
Фиг. 4 иллюстрирует примерный процесс 400 в соответствии с вариантом осуществления настоящего изобретения. Примерный процесс 400 может включать в себя одну или более операций, действий или функций, показанных в виде блоков, таких как 402 и 404, которые могут охватывать подблоки 410, 420, 430, 440, 450, 460, 470 и 480. Хотя различные блоки проиллюстрированы в виде дискретных блоков, ни могут быть разделены на дополнительные блоки, скомбинированы в меньшее количество блоков или аннулированы, в зависимости от желательной реализации. Примерный процесс 400 может быть реализован в примерной окружающей среде 100, примерном устройстве 200 и/или примерном сценарии 300. Ради простоты описания, а не ограничения его объема, примерный процесс 400 описан ниже в контексте реализации с использованием примерного устройства 200. Примерный процесс 400 может начинаться с блока 402.
На 402 примерный процесс400 может включать в себя выявление системой 205 управления, установленной на велосипеде, таком как велосипед 130 или велосипед 360, предстоящего возникновения события, имеющего отношение к велосипеду. За блоком 402 может следовать блок 404.
На 404 примерный процесс400 может включать в себя коррекцию системой 205 управления одной или более операций из множества операций, имеющих отношение к движению велосипеда, в том числе, торможения велосипеда, для предотвращения возникновения события. В некоторых вариантах осуществления множество операций, имеющих отношение к движению велосипеда, например, могут включать в себя рулевое управление, торможение и нажатие педалей велосипеда.
При выявлении предстоящего возникновения события, имеющего отношение к велосипеду, примерный процесс400 может включать в себя некоторое количество операций, в том числе 410 и 420.
На 410 примерный процесс400 может включать в себя контроль системой 205 управления одного или более параметров, имеющих отношение к движению велосипеда. В некоторых вариантах осуществления при контроле одного или более параметров, имеющих отношение к движению велосипеда, примерный процесс400 может включать в себя контроль системой 205 управления одного или более из угла наклона велосипеда, скорости велосипеда, ускорения велосипеда, угла поворота велосипеда, скорости вращения колеса велосипеда, измерения тормозного усилия и измерения усилия на педали. В некоторых вариантах осуществления, что касается контроля, примерный процесс400 может включать в себя контроль системой 205 управления посредством использования датчиков 215A–215N узла 210 считывания данных системы 205 управления. Датчики 215A–215N, например, могут включать в себя один или более из гироскопа, измерителя ускорений, датчика углового положения рулевого управления, датчика скорости вращения колеса, датчика тормозного усилия и датчика усилия на педали. За подблоком 410 может следовать подблок 420.
На 420 примерный процесс400 может включать в себя определение системой 205 управления, что возникновение события, имеющего отношение к велосипеду, неизбежно, на основании контроля. Например, система 205 управления может определять, что велосипед вероятно должен упасть вследствие угла наклона велосипеда, превышающего пороговый угол. В некоторых вариантах осуществления, при коррекции одной или более операций, имеющих отношение к движению велосипеда, примерный процесс400 может включать в себя коррекцию системой 205 управления одной или более операций для управления любым из равновесия и скорости велосипеда, или обоими из них. В ответ на определение системой 205 управления, что возникновение события не является неизбежным или маловероятно, примерный процесс400 может переходить к подблоку 410, чтобы продолжать контролировать один или более параметров, имеющих отношение к движению велосипеда.
При коррекции одной или более операций из множества операций, имеющих отношение к движению велосипеда, примерный процесс 400 может включать в себя некоторое количество операций, в том числе, 430, 440, 450, 460, 470 и 480.
На 430 примерный процесс400 может включать в себя идентификацию системой 205 управления по меньшей мере одной операции из множества операций, имеющих отношение к движению велосипеда, для коррекции. Например, система 205 управления может принимать решение, какое одно или более из рулевого управления, торможения или нажатия педалей велосипеда следует корректировать. За подблоком 430 может следовать подблок 440.
На 440 примерный процесс400 может включать в себя определение системой 205 управления величины коррекции для применения к по меньшей мере одной операции. Например, система 205 управления может определять насколько большое рулевое управление, торможение и/или нажатие педалей следует осуществлять при выполнении коррекции. За подблоком 440 может следовать подблок 450.
На 450 примерный процесс400 может включать в себя применение системой 205 управления определенной величины коррекции к по меньшей мере одной операции. Например, после определения (величины), насколько большая коррекция должна быть применена, система 205 управления может корректировать рулевое управление, торможение и/или нажатие педалей на определенную величину. За подблоком 450 может следовать подблок 460.
На 460 примерный процесс400 может включать в себя контроль системой 205 управления результата коррекции по меньшей мере одной операции. Например, система 205 управления может непрерывно контролировать результат коррекции в виде обратной связи. За подблоком 460 может следовать подблок 470.
На 470 примерный процесс может включать в себя определение системой 205 управления, требуется ли дополнительная коррекция для по меньшей мере одной операции, или нужно ли, чтобы корректировалась по меньшей мере одна другая операция из множества операций, имеющих отношение к движению велосипеда. Например, система 205 управления может определять, является ли примененная величина коррекции в самый раз, недостаточной или избыточной для достижения цели сведения на нет возникновения события. Если определено, что дополнительная коррекция требуется (например, вследствие недостаточности или избыточности примененной ранее коррекции), система 205 управления может определять, должна ли применяться дополнительная коррекция того же самого типа или другого иного типа. Например, если коррекция рулевого управления применялась раньше, и теперь определено, что примененная коррекция рулевого управления недостаточна для сведения на нет возникновения события, система 205 управления может определять такую дополнительную коррекцию рулевого управления. В качестве альтернативы или дополнительно, система 205 управления может определять, что коррекция торможения и/или нажатия педалей должна быть применена для сведения на нет возникновения события, такого как падение велосипеда, обусловленное углом наклона велосипеда, превышающим пороговый угол. Однако если определено, что не требуется ни дополнительная коррекция для по меньшей мере одной операции, ни коррекция в по меньшей мере одной другой операции, примерный процесс400 может переходить к подблоку 410 блока 402, чтобы продолжать контроль одного или более параметров, имеющих отношение к движению велосипеда. За подблоком 470 может следовать подблок 480.
На 480 примерный процесс может включать в себя применение системой 205 управления дополнительной коррекции к по меньшей мере одной операции в ответ на определение, что требуется дополнительная коррекция для по меньшей мере одной операции, или коррекцию по меньшей мере одной другой операции в ответ на определение, что нужно, чтобы корректировалась по меньшей мере одна другая операция.
После применения дополнительной коррекции к по меньшей мере одной операции или коррекции по меньшей мере одной другой операции, система 205 управления может переходить к блоку 460, чтобы продолжать контролировать результат дополнительной коррекции или применения по меньшей мере одной другой операции.
В контексте настоящей заявки форма единственного числа используется в отношении одного или более чем одного (то есть, в отношении меньшей мере одного) объекта обсуждения. В качестве примера, «пользователь» означает одного пользователя или более чем одного пользователя. Ссылка на всем протяжении этого описания изобретения на «один из вариантов осуществления», «вариант осуществления», «один из примеров» или «пример» означает, что конкретный признак, конструкция или характеристика, описанные в связи с вариантом осуществления или примером, включены по меньшей мере в один вариант осуществления настоящего изобретения. Таким образом, появление фраз «в одном из вариантов осуществления» или «в варианте осуществления», «один из примеров» или «пример» в разных местах на всем протяжении этого описания изобретения не обязательно всегда относится к одному и тому же варианту осуществления или примеру. Более того, конкретные признаки, конструкции, базы данных или характеристики могут комбинироваться в любых пригодных комбинациях и/или подкомбинациях в одном или более вариантов осуществления или примеров. В дополнение, следует понимать, что фигуры, предоставленные таким образом, предназначены для целей пояснения специалистам в данной области техники, и что чертежи не обязательно начерчены в масштабе.
Варианты осуществления в соответствии с настоящим изобретением могут быть воплощены в виде устройства, способа или компьютерного программного продукта. Соответственно, настоящее изобретение может принимать форму состоящего полностью из аппаратных средств варианта осуществления, состоящего полностью из программного обеспечения варианта осуществления (в том числе, микропрограммного обеспечения, резидентного программного обеспечения, микрокода, или тому подобного), или варианта осуществления, объединяющего аспекты программного обеспечения и аппаратных средств, которые в целом все могут обозначаться в материалах настоящей заявки как «схема», «модуль» или «система». Более того, варианты осуществления настоящего изобретения могут принимать форму компьютерного программного продукта, воплощенного на любом материальном носителе представления, имеющем используемую компьютером управляющую программу, воплощенную на носителе.
Блок-схемы последовательностей операций или структурные схемы на прилагаемых фигурах иллюстрируют архитектуру, функциональные возможности и работу возможных реализаций систем, способов и компьютерных программных продуктов согласно различным вариантам осуществления настоящего изобретения. В этом отношении, каждый структурный элемент на блок-схемах последовательностей операций или структурных схемах может представлять собой модуль, сегмент, порцию кода, которая содержит одну или более исполняемых команд для реализации заданной логической функции(ий). Также будет отмечено, что каждый структурный элемент структурных схем и/или блок-схем последовательностей операций и комбинации структурных элементов структурных схем и/или блок-схем последовательностей операций могут быть реализованы основанными на аппаратных средствах специального назначения системами, которые выполняют заданные функции или действия, или комбинациями аппаратных средств специального назначения и компьютерных команд. Эти команды компьютерной программы также могут храниться на машиночитаемом носителе, который может управлять компьютером или другим программируемым устройством обработки данных, чтобы функционировали конкретным образом, так чтобы команды, хранимые на машиночитаемом носителе, создавали продукт, включающий в себя командное средство, который реализует функцию/действие, заданные в структурном элементе или структурных элементах блок-схемы последовательности операций и/или структурной схемы.
Хотя настоящее изобретение описано в отношении определенных вариантов осуществления, другие варианты осуществления будут очевидны специалистам в данной области техники, принимая во внимание выгоды данного изобретения, в том числе варианты осуществления, которые не обеспечивают все выгоды и признаки, изложенные выше в материалах настоящей заявки, которые также находятся в объеме этого изобретения. Должно быть понятно, что другие варианты осуществления могут быть использованы, не выходя из объема настоящего изобретения.
Группа изобретений относится к области машиностроения. Способ управления устойчивостью велосипеда содержит этапы, на которых выявляются события, имеющие отношение к велосипеду, корректируют операции, имеющие отношение к движению велосипеда. Устройство управления устойчивостью велосипеда содержит систему управления для велосипеда. Система управления содержит контроллер и механизм регулирования устойчивостью. Контроллер выполнен с возможностью контролировать параметры, имеющие отношение к движению велосипеда. Контроллер выполнен с возможностью выявлять предстоящее возникновение события на основании контроля. Устройство управления устойчивостью велосипеда содержит велосипед, систему управления, контроллер и механизм регулирования устойчивости. Достигается повышение устойчивости при движении на велосипеде. 3 н. и 17 з.п. ф-лы, 4 ил.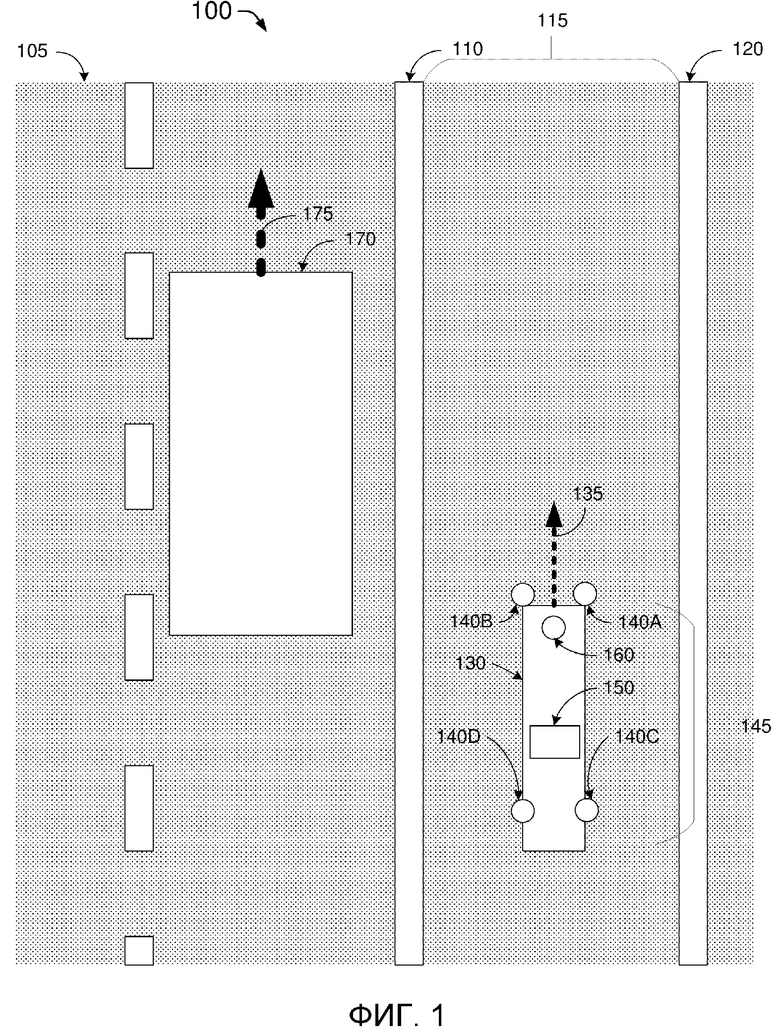
1. Способ управления устойчивостью велосипеда, содержащий этапы, на которых:
выявляют, посредством системы управления, установленной на велосипеде, предстоящее возникновение события, имеющего отношение к велосипеду, основываясь по меньшей мере частично на одном или более параметрах, относящихся к движению велосипеда, причем один или более параметры содержат измерения тормозного усилия, измерения усилия на педали или оба измерения; и
корректируют, посредством системы управления, одну или более операций из множества операций, имеющих отношение к движению велосипеда, включающих в себя торможение велосипеда для предотвращения возникновения события.
2. Способ по п. 1, в котором выявление предстоящего возникновения события, имеющего отношение к велосипеду, содержит этапы, на которых:
контролируют, посредством системы управления, один или более параметров, имеющих отношение к движению велосипеда; и
определяют, посредством системы управления, что возникновение события, имеющего отношение к велосипеду, является неизбежным, на основании контроля, причем событие содержит падение велосипеда, обусловленное углом наклона велосипеда, превышающим пороговый угол.
3. Способ по п. 2, в котором один или более параметры, имеющие отношение к движению велосипеда, также содержат угол наклона велосипеда, скорость велосипеда, ускорение велосипеда, угол поворота велосипеда, скорость вращения колеса велосипеда или их комбинации.
4. Способ по п. 2, в котором контроль содержит этап, на котором осуществляют контроль, используя множество датчиков системы управления, причем датчики содержат один или более из гироскопа, измерителя ускорений, датчика углового положения рулевого управления, датчика скорости вращения колеса, датчика тормозного усилия и датчика усилия на педали.
5. Способ по п. 1, в котором коррекция одной или более операций, имеющих отношение к движению велосипеда, содержит этапы, на которых:
идентифицируют по меньшей мере одну операцию из множества операций, имеющих отношение к движению велосипеда, для коррекции;
определяют величину коррекции для применения к по меньшей мере одной операции;
применяют определенную величину коррекции к по меньшей мере одной операции;
контролируют результат коррекции по меньшей мере одной операции;
определяют, требуется ли дополнительная коррекция для по меньшей мере одной операции, или нужно ли, чтобы корректировалась по меньшей мере одна другая операция из множества операций, имеющих отношение к движению велосипеда;
применяют дополнительную коррекцию к по меньшей мере одной операции в ответ на определение, что требуется дополнительная коррекция для по меньшей мере одной операции; и
корректируют по меньшей мере одну другую операцию в ответ на определение, что нужно, чтобы корректировалась по меньшей мере одна другая операция.
6. Способ по п. 1, в котором множество операций, имеющих отношение к движению велосипеда, содержат рулевое управление, торможение и нажатие педалей велосипеда.
7. Способ по п. 1, в котором коррекция одной или более операций, имеющих отношение к движению велосипеда, содержит этап, на котором корректируют одну или более операций для управления одним из равновесия и скорости велосипеда или ими обоими.
8. Устройство управления устойчивостью велосипеда, содержащее:
систему управления для велосипеда, содержащую:
контроллер, выполненный с возможностью контролировать один или более параметров, имеющих отношение к движению велосипеда, причем контроллер также выполнен с возможностью выявлять предстоящее возникновение события на основании контроля; и
механизм регулирования устойчивости, управляемый контроллером и выполненный с возможностью корректировать одну или более операций, имеющих отношение к движению велосипеда, включающих в себя торможение велосипеда, для предотвращения возникновения события, при этом один или более параметры содержат измерения тормозного усилия, измерения усилия на педали или оба измерения.
9. Устройство по п. 8, в котором один или более параметры, имеющие отношение к движению велосипеда, содержат также одно или более из угла наклона велосипеда, скорости велосипеда, ускорения велосипеда, угла поворота велосипеда, скорости вращения колеса велосипеда или их комбинации.
10. Устройство по п. 8, в котором одна или более операций, имеющих отношение к движению велосипеда, содержат одно или более из рулевого управления, торможения и нажатия педалей велосипеда.
11. Устройство по п. 8, в котором система управления также содержит множество датчиков, присоединенных с возможностью связи к контроллеру, и при этом контроллер выполнен с возможностью контролировать один или более параметров, имеющих отношение к движению велосипеда, чтобы выявлять предстоящее возникновение события с использованием данных, принятых от множества датчиков.
12. Устройство по п. 11, в котором множество датчиков содержит один или более из гироскопа, измерителя ускорений, датчика углового положения рулевого управления, датчика скорости вращения колеса, датчика тормозного усилия и датчика усилия на педали.
13. Устройство по п. 8, в котором при коррекции одной или более операций велосипеда механизм регулирования устойчивости выполнен с возможностью корректировать любое из равновесия и скорости велосипеда или их обоих посредством рулевого механизма системы управления.
14. Устройство по п. 8, в котором событие содержит падение велосипеда, обусловленное углом наклона велосипеда, превышающим пороговый угол.
15. Устройство управления устойчивостью велосипеда, содержащее:
велосипед; и
систему управления, установленную на велосипеде, содержащую:
контроллер, выполненный с возможностью контролировать один или более параметров, имеющих отношение к движению велосипеда, причем контроллер также выполнен с возможностью выявлять предстоящее возникновение события на основании контроля; и
механизм регулирования устойчивости, управляемый контроллером и выполненный с возможностью корректировать одну или более операций, имеющих отношение к движению велосипеда, включающих в себя торможение велосипеда, для предотвращения возникновения события, при этом один или более параметры содержат измерения тормозного усилия, измерения усилия на педали или оба измерения.
16. Устройство по п. 15, в котором один или более параметры, имеющие отношение к движению велосипеда, также содержат одно или более из угла наклона велосипеда, скорости велосипеда, ускорения велосипеда, угла поворота велосипеда, скорости вращения колеса велосипеда или их комбинации.
17. Устройство по п. 15, в котором одна или более операций, имеющих отношение к движению велосипеда, содержат одно или более из рулевого управления, торможения и нажатия педалей велосипеда.
18. Устройство по п. 15, в котором система управления также содержит множество датчиков, присоединенных с возможностью связи к контроллеру, и при этом контроллер выполнен с возможностью контролировать один или более параметры, имеющие отношение к движению велосипеда, чтобы выявлять предстоящее возникновение события с использованием данных, принятых от множества датчиков.
19. Устройство по п. 18, в котором множество датчиков содержит один или более из гироскопа, измерителя ускорений, датчика углового положения рулевого управления, датчика скорости вращения колеса, датчика тормозного усилия и датчика усилия на педали.
20. Устройство по п. 15, в котором при коррекции одной или более операций велосипеда механизм регулирования устойчивости выполнен с возможностью корректировать любое из равновесия и скорости велосипеда или их обоих посредством рулевого механизма системы управления.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Веломобиль | 1990 |
|
SU1838171A3 |

