ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к области техники автоматического вождения, и, в частности, к способу и оборудованию для получения угла поворота рулевого колеса транспортного средства, устройству и носителю данных.
УРОВЕНЬ ТЕХНИКИ
[0002] Для обеспечения автоматического вождения транспортного средства, система автоматического вождения нуждается в получении угла поворота рулевого колеса транспортного средства и управлении транспортным средством на основании полученного угла поворота рулевого колеса.
[0003] Традиционно датчик угла поворота рулевого колеса устанавливается в конструкции рулевого управления снаружи транспортного средства, для измерения и отправки угла поворота рулевого колеса транспортного средства системе автоматического вождения. Однако датчик угла поворота рулевого колеса подвержен повреждению, что требует высокой стоимости монтажа и обслуживания. Кроме того, повреждение датчика угла поворота рулевого колеса может приводить к тому, что система автоматического вождения не сможет получать угол поворота рулевого колеса транспортного средства, что негативно сказывается на управлении системы автоматического вождения транспортным средством и снижает эксплуатационную надежность системы автоматического вождения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Ввиду вышеизложенного, способ и оборудование для получения угла поворота рулевого колеса транспортного средства, устройство и носитель данных предусмотрены в вариантах осуществления настоящего изобретения, согласно которым датчик угла поворота рулевого колеса не требуется устанавливать в конструкции рулевого управления снаружи транспортного средства. Это позволяет решить проблему высокой стоимости и низкой безопасности автоматического вождения вследствие подверженности датчика угла поворота рулевого колеса повреждению в уровне техники.
[0005] Для решения вышеозначенной проблемы предусмотрены следующие технические решения согласно вариантам осуществления настоящего изобретения.
[0006] Предусмотрен способ получения угла поворота рулевого колеса транспортного средства. Способ включает в себя: получение испытательных данных транспортного средства, когда транспортное средство движется в заранее заданном порядке движения, где испытательные данные состоят из нескольких подмножеств, каждое из которых включает в себя первое значение кодового датчика положения (энкодера) рулевого колеса, первую скорость транспортного средства и первую угловую скорость рулевого колеса транспортного средства; вычисление, для каждого подмножества испытательных данных, первого угла поворота рулевого колеса транспортного средства, соответствующего подмножеству; получение соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства путем осуществления процесса аппроксимации на первом значении кодового датчика положения рулевого колеса в каждом подмножестве испытательных данных и первом угле поворота рулевого колеса транспортного средства, соответствующем подмножеству; получение второго значения кодового датчика положения рулевого колеса, когда транспортное средство движется нормально; и получение второго угла поворота рулевого колеса транспортного средства, соответствующего второму значению кодового датчика положения рулевого колеса, на основании соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства.
[0007] В возможной реализации, получение испытательных данных транспортного средства, когда транспортное средство движется в заранее заданном порядке движения включает в себя: получение, когда транспортное средство движется в заранее заданном порядке движения, первого значения кодового датчика положения рулевого колеса, сгенерированного кодовым датчиком положения рулевого колеса, первой скорости транспортного средства, собранной модулем спутниковой навигации, и первой угловой скорости рулевого колеса транспортного средства, собранной гироскопическим инерциальным датчиком, где первое значение кодового датчика положения рулевого колеса, первая скорость транспортного средства и первая угловая скорость рулевого колеса транспортного средства, полученные в один и тот же момент времени, образуют подмножество испытательных данных.
[0008] В возможной реализации, вычисление, для каждого подмножества испытательных данных, первого угла поворота рулевого колеса транспортного средства, соответствующего подмножеству включает в себя: вычисление произведения первой угловой скорости рулевого колеса транспортного средства, круговой постоянной и расстояния между передним и задним мостами транспортного средства для получения первого результата вычисления; умножение первой скорости транспортного средства на 360 для получения второго результата вычисления; деление первого результата вычисления на второй результат вычисления для получения третьего результата вычисления; и умножение арксинуса третьего результата вычисления на 2 для получения первого угла поворота рулевого колеса транспортного средства, соответствующего подмножеству испытательных данных.
[0009] В возможной реализации, способ дополнительно включает в себя: получение, когда транспортное средство движется нормально, второго угла поворота рулевого колеса транспортного средства в целевой период времени, где флуктуация второго угла поворота рулевого колеса транспортного средства в течение целевого периода времени находится в заранее заданном диапазоне; получение второй скорости транспортного средства и второй угловой скорости рулевого колеса транспортного средства в целевой период времени; вычисление третьего угла поворота рулевого колеса транспортного средства на основании второй скорости транспортного средства и второй угловой скорости рулевого колеса транспортного средства; и определение величины коррекции угла поворота рулевого колеса транспортного средства на основании второго угла поворота рулевого колеса транспортного средства в целевой период времени и третьего угла поворота рулевого колеса транспортного средства.
[0010] В возможной реализации, способ дополнительно включает в себя: корректировку, в момент времени после целевого периода времени, второго угла поворота рулевого колеса транспортного средства на основании величины коррекции угла поворота рулевого колеса транспортного средства.
[0011] В возможной реализации, вычисление третьего угла поворота рулевого колеса транспортного средства на основании второй скорости транспортного средства и второй угловой скорости рулевого колеса транспортного средства включает в себя: вычисление произведения второй угловой скорости рулевого колеса транспортного средства, круговой постоянной и расстояния между передним и задним мостами транспортного средства для получения четвертого результата вычисления; умножение второй скорости транспортного средства на 360 для получения пятого результата вычисления; деление четвертого результата вычисления на пятый результат вычисления для получения шестого результата вычисления; и умножение арксинуса шестого результата вычисления на 2 для получения третьего угла поворота рулевого колеса транспортного средства.
[0012] В возможной реализации, способ дополнительно включает в себя: инициирование сигнала ограничения рулевого колеса при определении, что абсолютное значение второго угла поворота рулевого колеса транспортного средства превышает заранее заданный порог.
[0013] Предусмотрено оборудование для получения угла поворота рулевого колеса транспортного средства. Оборудование включает в себя: первый блок получения, выполненный с возможностью получения испытательных данных транспортного средства, когда транспортное средство движется в заранее заданном порядке движения, где испытательные данные состоят из нескольких подмножеств, каждое из которых включает в себя первое значение кодового датчика положения рулевого колеса, первую скорость транспортного средства и первую угловую скорость рулевого колеса транспортного средства; первый блок вычисления, выполненный с возможностью вычисления, для каждого подмножества испытательных данных, первого угла поворота рулевого колеса транспортного средства, соответствующего подмножеству; блок аппроксимации, выполненный с возможностью использования первого значения кодового датчика положения рулевого колеса в каждом подмножестве испытательных данных и первого угла поворота рулевого колеса транспортного средства, соответствующего подмножеству, для аппроксимации соответствующего соотношения между кодовым датчиком положения рулевого колеса и углом поворота рулевого колеса транспортного средства; второй блок получения, выполненный с возможностью получения второго значения кодового датчика положения рулевого колеса, когда транспортное средство движется нормально; и второй блок вычисления, выполненный с возможностью получения второго угла поворота рулевого колеса транспортного средства, соответствующего второму значению кодового датчика положения рулевого колеса, на основании соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства.
[0014] Предусмотрено устройство для получения угла поворота рулевого колеса транспортного средства. Устройство включает в себя память, процессор и компьютерную программу, хранящуюся в памяти и исполняемую процессором. Процессор выполнен с возможностью выполнения компьютерной программы для осуществления способа получения угла поворота рулевого колеса транспортного средства.
[0015] Предусмотрен считываемый компьютером носитель данных. На считываемом компьютером носителе данных хранятся инструкции. Инструкции, при выполнении оконечным устройством, предписывают оконечному устройству осуществлять способ получения угла поворота рулевого колеса транспортного средства.
[0016] Как можно видеть из вышеизложенного, варианты осуществления настоящего изобретения дают следующие полезные результаты.
[0017] Согласно способу получения угла поворота рулевого колеса транспортного средства согласно вариантам осуществления настоящего изобретения, получение испытательных данных транспортного средства осуществляется, когда транспортное средство движется в заранее заданном порядке движения; для каждого подмножества испытательных данных вычисляется первый угол поворота рулевого колеса транспортного средства, соответствующий подмножеству; соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства получается путем осуществления процесса аппроксимации на первом значении кодового датчика положения рулевого колеса в каждом подмножестве испытательных данных и первом угле поворота рулевого колеса транспортного средства, соответствующем подмножеству; второе значение кодового датчика положения рулевого колеса получается, когда транспортное средство движется нормально; и второй угол поворота рулевого колеса транспортного средства, соответствующий второму значению кодового датчика положения рулевого колеса, получается на основании соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства. Согласно вариантам осуществления настоящего изобретения, соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства получается путем осуществления процесса аппроксимации на полученных испытательных данных транспортного средства. Второе значение кодового датчика положения рулевого колеса получается, когда транспортное средство движется нормально. Затем второй угол поворота рулевого колеса транспортного средства определяется на основании полученного соответствующего соотношения. Следовательно, второй угол поворота рулевого колеса транспортного средства можно получать в реальном времени на основании второго значения кодового датчика положения рулевого колеса, вместо измерения угла поворота рулевого колеса транспортного средства посредством датчика угла поворота рулевого колеса, это позволяет избежать накопления ошибок вследствие интегрирования по времени, достигая высокой точности угла поворота рулевого колеса транспортного средства, требуемой системой автоматического вождения. Таким образом, можно сэкономить на стоимости монтажа и обслуживания датчика угла поворота рулевого колеса, и проблему возможного сбоя в нормальном получении угла поворота рулевого колеса транспортного средства системой автоматического вождения вследствие отказа датчика угла поворота рулевого колеса можно решить, повышая эксплуатационную надежность автоматического вождения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0018] Фиг. 1 - концептуальная схема иллюстративного сценария применения способа получения угла поворота рулевого колеса транспортного средства согласно варианту осуществления настоящего изобретения;
[0019] фиг. 2 - блок-схема операций способа получения угла поворота рулевого колеса транспортного средства согласно варианту осуществления настоящего изобретения;
[0020] фиг. 3 - схема заранее заданного порядка движения транспортного средства согласно варианту осуществления настоящего изобретения;
[0021] фиг. 4 - диаграмма процесса линейной аппроксимации, осуществляемого на первых значениях кодового датчика положения рулевого колеса и первых углах поворота рулевого колеса транспортного средства, соответствующих первым значениям кодового датчика положения рулевого колеса согласно варианту осуществления настоящего изобретения;
[0022] фиг. 5 - блок-схема операций способа получения угла поворота рулевого колеса транспортного средства согласно другому варианту осуществления настоящего изобретения;
[0023] фиг. 6 - диаграмма коррекции второго угла поворота рулевого колеса транспортного средства согласно варианту осуществления настоящего изобретения; и
[0024] фиг. 7 - структурная схема оборудования для получения угла поворота рулевого колеса транспортного средства согласно варианту осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0025] Варианты осуществления настоящего изобретения описаны ниже более подробно совместно с чертежами и конкретными реализациями, чтобы сделать вышеприведенные задачу, признаки и преимущества настоящего изобретения более очевидными и понятными.
[0026] Сначала, для облегчения понимания и интерпретации технического решения, обеспеченного в вариантах осуществления настоящего изобретения, опишем уровень техники настоящего изобретения.
[0027] На основе изучения традиционных способов получения угла поворота рулевого колеса транспортного средства, было установлено, что традиционно угол поворота рулевого колеса транспортного средства получается посредством датчика угла поворота рулевого колеса. Датчик угла поворота рулевого колеса устанавливается в конструкции рулевого управления снаружи транспортного средства, таким образом, чтобы измерять угол поворота рулевого колеса транспортного средства. Полученный угол поворота рулевого колеса передается системе автоматического вождения, что позволяет системе автоматического вождения управлять транспортным средством на основании угла поворота рулевого колеса транспортного средства. Поскольку датчик угла поворота рулевого колеса устанавливается в конструкции рулевого управления снаружи транспортного средства, и транспортное средство движется в плохом окружении, датчик угла поворота рулевого колеса подвержен повреждению, что препятствует системе автоматического вождения в получении угла поворота рулевого колеса транспортного средства, что негативно сказывается на нормальном управлении системы автоматического вождения на транспортном средстве.
[0028] На этом основании согласно варианту осуществления настоящего изобретения предусмотрен способ получения угла поворота рулевого колеса транспортного средства. Получение испытательных данных транспортного средства осуществляется, когда транспортное средство движется в заранее заданном порядке движения. Для каждого подмножества испытательных данных, вычисляется первый угол поворота рулевого колеса транспортного средства, соответствующий подмножеству. Соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства получается путем осуществления процесса аппроксимации на первом значении кодового датчика положения рулевого колеса в каждом подмножестве испытательных данных и первом угле поворота рулевого колеса транспортного средства, соответствующем подмножеству. Второе значение кодового датчика положения рулевого колеса получается, когда транспортное средство движется нормально. Второй угол поворота рулевого колеса транспортного средства, соответствующий второму значению кодового датчика положения рулевого колеса, получается на основании соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства. Таким образом, второй угол поворота рулевого колеса транспортного средства можно получать из второго значения кодового датчика положения рулевого колеса, без необходимости в датчике угла поворота рулевого колеса для измерения угла поворота рулевого колеса транспортного средства. Поэтому можно избежать не только проблемы невозможности получить угол поворота рулевого колеса транспортного средства вследствие повреждения датчика угла поворота рулевого колеса, но и снизить стоимость монтажа и обслуживания.
[0029] Для облегчения понимания способа получения угла поворота рулевого колеса транспортного средства, предусмотренного вариантами осуществления настоящего изобретения, сначала опишем сценарий применения способа. Рассмотрим фиг. 1, где изображена концептуальная схема иллюстративного сценария применения способа получения угла поворота рулевого колеса транспортного средства согласно варианту осуществления настоящего изобретения. Способ применим к системе автоматического вождения.
[0030] На практике, система автоматического вождения может включать в себя кодовый датчик положения (энкодер) 101 рулевого колеса в электрическом рулевом колесе и контроллер 102 автоматического вождения. Когда транспортное средство движется в заранее заданном порядке движения, первые углы поворота рулевого колеса транспортного средства можно вычислять посредством контроллера 102 автоматического вождения, и первые значения кодового датчика положения рулевого колеса можно получать посредством кодового датчика положения 101 рулевого колеса. Соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства получается путем осуществления процесса аппроксимации на первых углах поворота рулевого колеса транспортного средства и первых значениях кодового датчика положения рулевого колеса. Второе значение кодового датчика положения рулевого колеса можно получать от кодового датчика положения 101 рулевого колеса, когда транспортное средство движется нормально, и второй угол поворота рулевого колеса транспортного средства, соответствующий второму значению кодового датчика положения рулевого колеса, можно получать на основании соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства.
[0031] Специалисты в данной области техники могут понять, что концептуальная схема, показанная на фиг. 1, является только примером для реализации варианты осуществления настоящего изобретения, и применение вариантов осуществления настоящего изобретения не ограничивается этим.
[0032] Для облегчения понимания технических решений, предусмотренных вариантами осуществления настоящего изобретения, способ получения угла поворота рулевого колеса транспортного средства, предусмотренный вариантами осуществления настоящего изобретения описаны ниже со ссылкой на чертежи.
[0033] Рассмотрим фиг. 2, где изображена блок-схема операций способа получения угла поворота рулевого колеса транспортного средства согласно варианту осуществления настоящего изобретения. Как показано на фиг. 2, способ может включать в себя этапы S201 - S205.
[0034] На этапе S201, получение испытательных данных транспортного средства осуществляется, когда транспортное средство движется в заранее заданном порядке движения, где испытательные данные состоят из нескольких подмножеств, каждое из которых включает в себя первое значение кодового датчика положения рулевого колеса, первую скорость транспортного средства и первую угловую скорость рулевого колеса транспортного средства.
[0035] Согласно варианту осуществления настоящего изобретения, угол поворота рулевого колеса транспортного средства определяется на основании соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства. Соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства нужно определять до нормального движения транспортного средства.
[0036] Следует отметить, что для точного определения соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства на основании испытательных данных, порядок движения может быть заранее задан для транспортного средства таким образом, чтобы избежать возможности испытательных данных, полученных при произвольном движении транспортного средства не отвечать требованию для определения соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства.
[0037] Заранее заданный порядок движения не ограничивается вариантом осуществления настоящего изобретения. В возможной реализации, транспортное средство может двигаться по маршруту в форме буквы ʺSʺ для получения большого количества углов поворота рулевого колеса.
[0038] В частности, заранее заданный порядок движения может предполагать, что: транспортное средство сначала движется по прямой линии, затем поворачивает рулевое колесо в первом направлении на некоторый угол и движется в течение некоторого периода времени, и затем поворачивает рулевое колесо в направлении, противоположном первому направлению, на некоторый угол и движется в течение некоторого периода времени, таким образом, чтобы реализовать маршрут движения в форме буквы ʺSʺ, и в конце концов возвращается к первоначальному направлению для прямолинейного движения.
[0039] Рассмотрим фиг. 3, где изображена схема заранее заданного порядка движения транспортного средства согласно варианту осуществления настоящего изобретения. В порядке движения, транспортное средство сначала движется по прямой линии в течение 10 секунд, затем поворачивает рулевое колесо на 10 градусов влево и движется влево в течение 10 секунд, затем поворачивает рулевое колесо на 20 градусов вправо (что эквивалентно повороту рулевого колеса на 10 градусов вправо после выравнивания рулевого колеса) и движется вправо в течение 20 секунд, затем поворачивает рулевое колесо на 20 градусов влево (что эквивалентно повороту рулевого колеса на 10 градусов влево после выравнивания рулевого колеса) и движется влево в течение 10 секунд, и в конце концов поворачивает рулевое колесо на 10 градусов вправо для возврата к первоначальному направлению для прямолинейного движения. Следует отметить, что, для заранее заданного порядка движения, варианты осуществления настоящего изобретения не ограничивают периоды времени различных стадий в заранее заданном порядке движения, величину углов для регулировки рулевого колеса, кратность регулировки рулевого колеса и порядок регулировок направления, которые могут устанавливаться на основании фактической необходимости. Например, периоды времени движения на разных стадиях могут превышать 10 секунд и могут отличаться друг от друга, углы для регулировки рулевого колеса могут составлять 5 градусов, 10 градусов, 15 градусов и пр.
[0040] Несколько подмножеств испытательных данных транспортного средства получается, когда транспортное средство движется в заранее заданном порядке движения. Каждое подмножество испытательных данных включает в себя первое значение кодового датчика положения рулевого колеса, первую скорость транспортного средства и первую угловую скорость рулевого колеса транспортного средства. В порядке примера, первое значение кодового датчика положения рулевого колеса, сгенерированное кодовым датчиком положения рулевого колеса, первая скорость транспортного средства, собранная модулем спутниковой навигации, и первая угловая скорость рулевого колеса транспортного средства, собранная гироскопическим инерциальным датчиком, можно получать, когда транспортное средство движется в заранее заданном порядке движения.
[0041] Для прояснения соответствия между первым значением кодового датчика положения рулевого колеса, первой скоростью транспортного средства и первой угловой скоростью рулевого колеса транспортного средства, первое значение кодового датчика положения рулевого колеса, первую скорость транспортного средства и первую угловую скорость рулевого колеса транспортного средства, собранные в один и тот же момент времени, можно группировать как подмножество испытательных данных. Первое значение кодового датчика положения рулевого колеса генерируется кодовым датчиком положения рулевого колеса, которое имеет соответствующее соотношение с углом поворота рулевого колеса. Первая скорость транспортного средства собирается модулем спутниковой навигации и указывает скорость движения транспортного средства. Первая угловая скорость рулевого колеса транспортного средства собирается гироскопическим инерциальным датчиком и указывает угловая скорость вращения рулевого вала транспортного средства.
[0042] Можно понять, что трудно получить точное соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства на основании одного-единственного множества испытательных данных. Транспортным средством можно управлять в заранее заданном порядке движения несколько раз для получения нескольких множеств испытательных данных соответственно. Кроме того, для снижения ошибки полученного соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства, заранее заданный порядок движения транспортного средства можно регулировать для получения испытательных данных, соответствующих другому заранее заданному порядку движения.
[0043] На этапе S202, для каждого подмножества испытательных данных, вычисляется первый угол поворота рулевого колеса транспортного средства, соответствующий подмножеству.
[0044] Первый угол поворота рулевого колеса транспортного средства вычисляется на основании подмножества испытательных данных. Первый угол поворота рулевого колеса транспортного средства можно вычислять на основании первой угловой скорости рулевого колеса транспортного средства и первой скорости транспортного средства в подмножестве испытательных данных.
[0045] Вычисление первого угла поворота рулевого колеса транспортного средства, соответствующего каждому подмножеству испытательных данных, включает в себя этапы A1 - А4.
[0046] На этапе А1, произведение первой угловой скорости рулевого колеса транспортного средства, круговой постоянной и расстояния между передним и задним мостами транспортного средства вычисляется для получения первого результата вычисления.
[0047] Первая угловая скорость рулевого колеса транспортного средства получается из испытательных данных, и расстояние между передним и задним мостами транспортного средства означает расстояние между передним мостом и задним мостом, соответствующими автомобилю. Первый результат вычисления можно выразить формулой (1):

[0048] В формуле (1), ROT1 представляет первую угловую скорость рулевого колеса транспортного средства, PI представляет круговую постоянную, и WB1 представляет расстояние между передним и задним мостами транспортного средства.
[0049] На этапе А2, первая скорость транспортного средства умножается на 360 для получения второго результата вычисления.
[0050] Второй результат вычисления можно выразить формулой (2):

[0051] В формуле (2), VEL1 представляет первую скорость транспортного средства в том же подмножестве испытательных данных, что и первая угловая скорость рулевого колеса транспортного средства в А1.
[0052] На этапе A3, первый результат вычисления делится на второй результат вычисления для получения третьего результата вычисления.
[0053] На этапе А4: арксинус третьего результата вычисления умножается на 2 для получения первого угла поворота рулевого колеса транспортного средства, соответствующего подмножеству испытательных данных.
[0054] Первый угол поворота рулевого колеса транспортного средства можно выразить формулой (3):
[0055] Следует отметить, что asin() представляет операцию вычисления значения арксинуса.
[0056] На этапе S203, соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства получается путем осуществления процесса аппроксимации на первом значении кодового датчика положения рулевого колеса в каждом подмножестве испытательных данных и первом угле поворота рулевого колеса транспортного средства, соответствующем подмножеству.
[0057] Первый угол поворота рулевого колеса транспортного средства можно вычислять с использованием первой угловой скорости рулевого колеса транспортного средства и первая скорость транспортного средства. Соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства можно получать с использованием первого угла поворота рулевого колеса транспортного средства и первого значения кодового датчика положения рулевого колеса, где первое значение кодового датчика положения рулевого колеса находится в том же подмножестве испытательных данных, что и первая угловая скорость рулевого колеса транспортного средства и первая скорость транспортного средства.
[0058] Соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства можно получать путем осуществления процесса аппроксимации на первых значениях кодового датчика положения рулевого колеса и соответствующих первых углах поворота рулевого колеса транспортного средства.
[0059] Процесс аппроксимации не ограничивается в вариантах осуществления настоящего изобретения. В возможной реализации, линейная аппроксимация одним отрезком может осуществляться на первых значениях кодового датчика положения рулевого колеса и соответствующих первых углах поворота рулевого колеса транспортного средства, для получения результата, соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства получается согласно результату. Рассмотрим фиг. 4, где изображена диаграмма линейной аппроксимации, осуществляемой на первых значениях кодового датчика положения рулевого колеса и соответствующих первых углах поворота рулевого колеса транспортного средства согласно варианту осуществления настоящего изобретения. Устанавливается система координат, в которой горизонтальная ось представляет угол поворота рулевого колеса, и вертикальная ось представляет значение кодового датчика положения рулевого колеса, и начало отсчета указывает угол поворота рулевого колеса 0 и значение кодового датчика положения рулевого колеса 10000. Горизонтальная ось системы координат представляет угол поворота рулевого колеса, и вертикальная ось представляет значение кодового датчика положения рулевого колеса. Координатные точки маркируются в системе координат на основании первых значений кодового датчика положения рулевого колеса в испытательных данных и соответствующих первых углов поворота рулевого колеса транспортного средства. Прямая линия аппроксимации получается путем осуществления процесса линейной аппроксимации на координатных точках. Полученная прямая линия аппроксимации представляет соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства. В другой возможной реализации, процесс линейной аппроксимации двумя отрезками или нелинейной аппроксимации может осуществляться с использованием первых значений кодового датчика положения рулевого колеса и соответствующих первых углов поворота рулевого колеса транспортного средства.
[0060] Согласно варианту осуществления настоящего изобретения, получение испытательных данных транспортного средства осуществляется, когда транспортное средство движется в заранее заданном порядке движения, и соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства получается на основании испытательных данных. Таким образом, при нормальном движении транспортного средства, угол поворота рулевого колеса транспортного средства можно получать на основании значения кодового датчика положения рулевого колеса с использованием соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства. Следовательно, не требуется обеспечивать датчик угла поворота рулевого колеса для получения угла поворота рулевого колеса транспортного средства, что позволяет сэкономить на стоимости монтажа и обслуживания датчика угла поворота рулевого колеса.
[0061] На этапе S204 второе значение кодового датчика положения рулевого колеса получается, когда транспортное средство движется нормально.
[0062] Следует отметить, что нормальное движение транспортного средства означает состояние движения транспортного средства в состоянии без испытания. Второе значение кодового датчика положения рулевого колеса получается, когда транспортное средство движется нормально. Второе значение кодового датчика положения рулевого колеса может генерироваться кодовым датчиком положения рулевого колеса, когда транспортное средство движется нормально.
[0063] На этапе S205, второй угол поворота рулевого колеса транспортного средства, соответствующий второму значению кодового датчика положения рулевого колеса, получается на основании соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства.
[0064] Второй угол поворота рулевого колеса транспортного средства, соответствующий второму значению кодового датчика положения рулевого колеса, можно получать на основании определенного соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства, и второго значения кодового датчика положения рулевого колеса. Автоматическое вождение состояние транспортного средства можно регулировать на основании второго угла поворота рулевого колеса транспортного средства.
[0065] Как можно видеть из этапов S201 - S205, второе значение кодового датчика положения рулевого колеса получается при нормальном движении транспортного средства, и второй угол поворота рулевого колеса транспортного средства, соответствующий второму значению кодового датчика положения рулевого колеса, можно получать на основании соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства, полученным путем осуществления процесса аппроксимации на данных, полученных, когда транспортное средство движется в заранее заданном порядке движения. Таким образом, угол поворота рулевого колеса транспортного средства можно получать без датчика угла поворота рулевого колеса. С одной стороны, можно сэкономить на стоимости монтажа и обслуживания датчика угла поворота рулевого колеса, и с другой стороны, решается проблема возможного сбоя в получении угла поворота рулевого колеса транспортного средства вследствие отказа датчика угла поворота рулевого колеса, что позволяет повысить эксплуатационную надежность автоматического вождения. Кроме того, второй угол поворота рулевого колеса транспортного средства можно получать в реальном времени, получая второе значение кодового датчика положения рулевого колеса. Согласно вариантам осуществления настоящего изобретения, второй угол поворота рулевого колеса транспортного средства определяется на основании соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства, без привлечения фактора времени, и, таким образом, не происходит накопления ошибок, обусловленного интегрированием по времени. Это позволяет добиться высокой точности угла поворота рулевого колеса транспортного средства, полученной на основании соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства, отвечающих требованиям системы автоматического вождения для управления транспортным средством.
[0066] Можно понять, что в конструкции рулевого управления транспортного средства существует рабочий зазор. Конструкция рулевого управления может изменяться до некоторой степени после нескольких поворотов руля транспортного средства, в результате чего происходит смещение нулевой точки между значением кодового датчика положения рулевого колеса и фактическим углом поворота рулевого колеса. Поэтому угол поворота транспортного средства, представленный вторым значением кодового датчика положения рулевого колеса, полученным при нормальном движении транспортного средства, может отклоняться, приводя к отклонению второго угла поворота рулевого колеса транспортного средства, полученного на основании второго значения кодового датчика положения рулевого колеса, от фактического угла поворота рулевого колеса транспортного средства.
[0067] На основании вышеизложенного, согласно варианту осуществления настоящего изобретения дополнительно обеспечивается способ получения коррекции смещения нулевой точки угла поворота рулевого колеса транспортного средства. Рассмотрим фиг. 5, где изображена блок-схема операций способа получения угла поворота рулевого колеса транспортного средства согласно другому варианту осуществления настоящего изобретения. Как показано на фиг. 5, способ дополнительно включает в себя этапы S206 - S209 помимо вышеупомянутых этапов S201 - S205.
[0068] На этапе S206, второй угол поворота рулевого колеса транспортного средства в целевой период времени получается, когда транспортное средство движется нормально, где флуктуация второго угла поворота рулевого колеса транспортного средства в течение целевого периода времени находится в заранее заданном диапазоне.
[0069] Для коррекции смещения нулевой точки угла поворота рулевого колеса транспортного средства при нормальном движении транспортного средства в режиме реального времени, определяется целевой период времени, и получается второй угол поворота рулевого колеса транспортного средства в целевой период времени для коррекции угла поворота рулевого колеса транспортного средства в последующем процессе. Второй угол поворота рулевого колеса транспортного средства можно получать на основании значения кодового датчика положения рулевого колеса, полученного в целевой период времени, и соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства.
[0070] Следует отметить, что целевой период времени может быть периодом времени длительностью меньшей или равной пороговой продолжительности времени. Кроме того, второй угол поворота рулевого колеса транспортного средства может флуктуировать вследствие управления транспортным средством. Для обеспечения коррекции угла поворота рулевого колеса транспортного средства в реальном времени и повышения точности скорректированного угла поворота рулевого колеса транспортного средства, флуктуация второго угла поворота рулевого колеса транспортного средства в течение целевого периода времени должна находиться в заранее заданного диапазона. С использованием стабильного второго угла поворота рулевого колеса транспортного средства в течение целевого периода времени, точность скорректированного угла поворота рулевого колеса транспортного средства повышается.
[0071] В порядке примера, целевой период времени может определяться на основании пороговой продолжительности времени и заранее заданного диапазона флуктуации второго угла поворота рулевого колеса транспортного средства в течение целевого периода времени. В возможной реализации, с учетом непрерывности данных второго угла поворота рулевого колеса транспортного средства и коррекции в реальном времени, целевой период времени может определяться методом скользящего окна. Временной интервал между соседними скользящими окнами не имеет здесь ограничений, и может устанавливаться на основании требований корректировки второго угла поворота рулевого колеса транспортного средства.
[0072] Например, порог длительности скользящего окна задается равным 3 секундам, и заранее заданный диапазон флуктуации второго угла поворота рулевого колеса транспортного средства составляет ±2 градуса. В случае, когда флуктуация второго угла поворота рулевого колеса транспортного средства меньше 2 градусов в течение периода времени от 0 до 3-й секунды, период времени от 0 до 3-й секунды определяется как первый целевой период времени. 3-секундное скользящее окно скользит на 0,5 секунд каждый раз. После каждого скольжения скользящего окна, второй угол поворота рулевого колеса транспортного средства в скользящем окне является втором углом поворота рулевого колеса транспортного средства в целевой период времени, соответствующий скользящему окну. В случае, когда флуктуация второго угла поворота рулевого колеса транспортного средства больше 2 градусов на 4-й секунде, скользящее окно продолжается для перемещения со временем. В случае, когда флуктуация второго угла поворота рулевого колеса транспортного средства меньше или равна 2 градусов в течение периода времени от 4-й секунды до 7-й секунды, период времени от 4-й секунды до 7-й секунды определяется как другой целевой период времени. Процесс повторяется для обновления целевого периода времени со временем.
[0073] На этапе S207, получаются вторая скорость транспортного средства и вторая угловая скорость рулевого колеса транспортного средства в целевой период времени.
[0074] Помимо второго угла поворота рулевого колеса транспортного средства в целевой период времени, вторая скорость транспортного средства и вторая угловая скорость рулевого колеса транспортного средства в целевой период времени получаются. Вторую скорость транспортного средства можно собирать посредством модуля спутниковой навигации, и вторую угловую скорость рулевого колеса транспортного средства можно собирать посредством гироскопического инерциального датчика. Можно понять, что существует соответствие между вторым углом поворота рулевого колеса транспортного средства, второй скоростью транспортного средства и второй угловой скоростью рулевого колеса транспортного средства, которые получаются в течение одного и того же целевого периода времени.
[0075] На этапе S208 третий угол поворота рулевого колеса транспортного средства вычисляется на основании второй скорости транспортного средства и второй угловой скорости рулевого колеса транспортного средства.
[0076] Третий угол поворота рулевого колеса транспортного средства можно вычислять на основании полученной второй скорости транспортного средства и второй угловой скорости рулевого колеса транспортного средства. Третий угол поворота рулевого колеса транспортного средства вычисляется более точно, и может использоваться для коррекции второго угла поворота рулевого колеса транспортного средства.
[0077] Третий угол поворота рулевого колеса транспортного средства можно вычислять по формуле (4):
[0078] В формуле (4), произведение второй угловой скорости рулевого колеса транспортного средства ROT2, круговой постоянной PI и расстояния WB2 между передним и задним мостами транспортного средства, т.е. ROT2×PI×WB2, именуется четвертым результатом вычисления. Расстояние между передним и задним мостами транспортного средства означает расстояние между передним мостом и задним мостом, соответствующими транспортному средству. Кроме того, пятый результат вычисления получается умножением второй скорости транспортного средства VEL2 на 360, т.е. 360×VEL2. Шестой результат вычисления, т.е.  , получается делением четвертого результата вычисления на пятый результат вычисления. В конце концов, третий угол поворота рулевого колеса транспортного средства получается умножением арксинуса значение шестого результата вычисления на 2.
, получается делением четвертого результата вычисления на пятый результат вычисления. В конце концов, третий угол поворота рулевого колеса транспортного средства получается умножением арксинуса значение шестого результата вычисления на 2.
[0079] На этапе S209, величина коррекции угла поворота рулевого колеса транспортного средства определяется на основании второго угла поворота рулевого колеса транспортного средства в целевой период времени и третьего угла поворота рулевого колеса транспортного средства.
[0080] Угол поворота рулевого колеса транспортного средства может корректироваться на основании второго угла поворота рулевого колеса транспортного средства, полученный в целевой период времени, и соответственно вычисленный третьего угла поворота рулевого колеса транспортного средства. В возможной реализации, для вычисления величины коррекции угла поворота рулевого колеса транспортного средства может использоваться разность между третьим углом поворота рулевого колеса транспортного средства и вторым углом поворота рулевого колеса транспортного средства. Например, можно вычислять среднее третьих углов поворота рулевого колеса транспортного средства в течение целевого периода времени и среднее вторых углов поворота рулевого колеса транспортного средства в течение одного и того же целевого периода времени, и разность между средним третьих углов поворота рулевого колеса транспортного средства и средним вторых углов поворота рулевого колеса транспортного средства может определяться как величина коррекции угла поворота рулевого колеса транспортного средства. В другой возможной реализации, среднее разностей между третьим углом поворота рулевого колеса транспортного средства и вторым углом поворота рулевого колеса транспортного средства в различные моменты времени может определяться как величина коррекции угла поворота рулевого колеса транспортного средства.
[0081] Согласно вариантам осуществления настоящего изобретения, получаются второй угол поворота рулевого колеса транспортного средства, вторая скорость транспортного средства и вторая угловая скорость рулевого колеса транспортного средства в целевой период времени, и третий угол поворота рулевого колеса транспортного средства используется как цель коррекции, для получения величины коррекции угла поворота рулевого колеса транспортного средства. Второй угол поворота рулевого колеса транспортного средства может корректироваться на основании величины коррекции угла поворота рулевого колеса транспортного средства, для получения более точного угла поворота рулевого колеса транспортного средства. Таким образом, корректируется отклонение второго угла поворота рулевого колеса транспортного средства, обусловленное смещением между значением кодового датчика положения рулевого колеса и фактическим углом поворота рулевого колеса транспортного средства.
[0082] Дополнительно, второй угол поворота рулевого колеса транспортного средства, полученный в момент времени после целевого периода времени, может корректироваться с использованием полученной величины коррекции угла поворота рулевого колеса транспортного средства.
[0083] Например, в момент времени после целевого периода времени, второй угол поворота рулевого колеса транспортного средства может корректироваться на основании величины коррекции угла поворота рулевого колеса транспортного средства.
[0084] Следует отметить, что момент времени после целевого периода времени может быть моментом времени в следующий целевой период времени после целевого периода времени. Таким образом, второй угол поворота рулевого колеса транспортного средства в текущий целевой период времени может корректироваться с использованием величины коррекции угла поворота рулевого колеса транспортного средства, полученного в предыдущий целевой период времени.
[0085] Рассмотрим фиг. 6, где изображена диаграмма коррекции второго угла поворота рулевого колеса транспортного средства согласно варианту осуществления настоящего изобретения.
[0086] Как показано на фиг. 6, устанавливается система координат, в которой горизонтальная ось представляет время, и вертикальная ось представляет угол поворота рулевого колеса. Второй угол поворота рулевого колеса транспортного средства и третий угол поворота рулевого колеса транспортного средства в различные целевые периоды времени представлены в системе координат. Как показано на фиг. 6, в системе координат, черная сплошная линия представляет второй угол поворота рулевого колеса транспортного средства, серая сплошная линия представляет третий угол поворота рулевого колеса транспортного средства, и черная пунктирная линия представляет скорректированный второй угол поворота рулевого колеса транспортного средства. Заранее заданный диапазон флуктуации задается равным ±1 градусу, и пороговый период времени равен 4 секундам. Период времени от 342-й секунды до 343-й секунды является первым целевым периодом времени. Поскольку флуктуация на 343-й секунде превышает диапазон ±1 градус, скользящее окно воссоздается, начиная с 343-й секунды, с получением второго целевого периода времени от 343-й секунды до 347-й секунды. Поскольку флуктуация на 347-й секунде превышает диапазон ±1 градус, скользящее окно воссоздается, начиная с 347-й секунды, с получением скользящего окна от 347-й секунды до 351-й секунды. Скользящее окно скользит вправо по времени. Предполагая, что скользящее окно перемещается в интервале 1 секунды, получаются третий целевой период времени от 347-й секунды до 351-й секунды, четвертый целевой период времени от 348-й секунды до 352-й секунды, и пятый целевой период времени от 349-й секунды до 353-й секунды. Поскольку флуктуация на 353-й секунде превышает ±1 градус, скользящее окно воссоздается, начиная с 353-й секунды, с получением шестого целевого периода времени от 353-й секунды до 356-й секунды. В процессе корректировки второго угла поворота рулевого колеса транспортного средства, второй угол поворота рулевого колеса транспортного средства в течение второго целевого периода времени корректируется на основании величины коррекции угла поворота рулевого колеса транспортного средства в первый целевой период времени. Затем величина коррекции угла поворота рулевого колеса транспортного средства в течение второго целевого периода получается на основании второго угла поворота рулевого колеса транспортного средства и соответствующего третьего угла поворота рулевого колеса транспортного средства в течение второго целевого периода. Затем второй угол поворота рулевого колеса транспортного средства в третий целевой период времени корректируется на основании величины коррекции угла поворота рулевого колеса транспортного средства в течение второго целевого периода времени. Процесс повторяется для завершения коррекции второго угла поворота рулевого колеса транспортного средства во всех целевых периодах времени.
[0087] Согласно варианту осуществления настоящего изобретения, второй угол поворота рулевого колеса транспортного средства в текущий целевой период времени корректируется с использованием величины коррекции угла поворота рулевого колеса транспортного средства, полученной в предыдущий целевой период времени, что позволяет своевременно корректировать второй угол поворота рулевого колеса транспортного средства. Поскольку величина коррекции угла поворота рулевого колеса транспортного средства определяется непосредственно из предыдущего целевого периода времени, производительность в реальном времени высока, и коррекция более точна.
[0088] Кроме того, угол поворота рулевого колеса может быть ограничен.
[0089] Способ может дополнительно включать в себя этап инициирования сигнала ограничения рулевого колеса при определении, что абсолютное значение второго угла поворота рулевого колеса транспортного средства превышает заранее заданный порог.
[0090] Второй угол поворота рулевого колеса транспортного средства можно получать на основании второго значения кодового датчика положения рулевого колеса и соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства. Второй угол поворота рулевого колеса транспортного средства может указывать текущий угол поворота рулевого колеса транспортного средства. Во избежание аномального управления, обусловленного избыточным углом поворота рулевого колеса транспортного средства, может устанавливаться заранее заданный порог для угла поворота рулевого колеса транспортного средства. Затем производится определение, превышает ли абсолютное значение второго угла поворота рулевого колеса транспортного средства заранее заданный порог. При определении, что абсолютное значение второго угла поворота рулевого колеса транспортного средства превышает заранее заданный порог, сигнал ограничения рулевого колеса инициируется таким образом, чтобы ограничивать угол поворота, инициированный рулевым колесом.
[0091] Сигнал ограничения рулевого колеса используется для ограничения угла поворота, инициированного рулевым колесом. После инициирования сигнала ограничения рулевого колеса, угол поворота рулевого колеса может ограничиваться заранее заданный порогом. Например, в случае, когда заранее заданный порог составляет 60 градусов для ограничения абсолютного значения угла поворота рулевого колеса транспортного средства, и полученный второй угол поворота рулевого колеса транспортного средства равен -70 градусов, абсолютное значение превышает заранее заданный порог, сигнал ограничения рулевого колеса инициируется для управления углом поворота, инициированного рулевым колесом. Таким образом, даже если угол поворота, инициированный фактически рулевым колесом должен составлять -70 градусов, угол поворота, инициированный рулевым колесом, ограничивается -60 градусов при осуществлении управления транспортным средством.
[0092] На основании вышеизложенного, угол поворота, инициированный рулевым колесом может управляться на основании сравнения между абсолютным значением второго угла поворота рулевого колеса транспортного средства и заранее заданным пороговым значением. Таким образом, аномального управления вследствие избыточного угла поворота, инициированного рулевым колесом, можно избегать, не устанавливая датчик ограничения, что гарантирует эксплуатационную надежность автоматического вождения.
[0093] На основе способа получения угла поворота рулевого колеса транспортного средства обеспеченный в вышеприведенных вариантах осуществления способа, оборудование для получения угла поворота рулевого колеса транспортного средства дополнительно обеспечивается согласно варианту осуществления настоящего изобретения. Оборудование описано ниже со ссылкой на чертежи.
[0094] Рассмотрим фиг. 7, где изображена структурная схема оборудования для получения угла поворота рулевого колеса транспортного средства согласно варианту осуществления настоящего изобретения.
[0095] Первый блок 701 получения выполнен с возможностью получения испытательных данных транспортного средства, когда транспортное средство движется в заранее заданном порядке движения, где испытательные данные состоят из нескольких подмножеств, каждое из которых включает в себя первое значение кодового датчика положения рулевого колеса, первую скорость транспортного средства и первую угловую скорость рулевого колеса транспортного средства.
[0096] Первый блок 702 вычисления выполнен с возможностью вычисления, для каждого подмножества испытательных данных, первого угла поворота рулевого колеса транспортного средства, соответствующего подмножеству.
[0097] Блок 703 аппроксимации выполнен с возможностью получения соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства путем осуществления процесса аппроксимации на первом значении кодового датчика положения рулевого колеса в каждом подмножестве испытательных данных и первом угле поворота рулевого колеса транспортного средства, соответствующем подмножеству.
[0098] Второй блок 704 получения выполнен с возможностью получения второго значения кодового датчика положения рулевого колеса, когда транспортное средство движется нормально.
[0099] Второй блок 705 вычисления выполнен с возможностью получения второго угла поворота рулевого колеса транспортного средства, соответствующего второму значению кодового датчика положения рулевого колеса, на основании соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства.
[0100] Согласно варианту осуществления, первый блок 701 получения в частности выполнен с возможностью получения, когда транспортное средство движется в заранее заданном порядке движения, первое значение кодового датчика положения рулевого колеса, сгенерированное кодовым датчиком положения рулевого колеса, первая скорость транспортного средства, собранная модулем спутниковой навигации, и первая угловая скорость рулевого колеса транспортного средства, собранная гироскопическим инерциальным датчиком. Первое значение кодового датчика положения рулевого колеса, первая скорость транспортного средства и первая угловая скорость рулевого колеса транспортного средства, полученные в один и тот же момент времени, образуют подмножество испытательных данных
[0101] Согласно варианту осуществления, первый блок 702 вычисления включает в себя: первый подблок вычисления, второй подблок вычисления, третий подблок вычисления и первый подблок оперирования данными.
[0102] Первый подблок вычисления выполнен с возможностью вычисления произведение первой угловой скорости рулевого колеса транспортного средства, круговой постоянной и расстояния между передним и задним мостами транспортного средства для получения первого результата вычисления.
[0103] Второй подблок вычисления выполнен с возможностью умножения первой скорости транспортного средства на 360 для получения второго результата вычисления.
[0104] Третий подблок вычисления выполнен с возможностью деления первого результата вычисления на второй результат вычисления для получения третьего результата вычисления.
[0105] Первый подблок оперирования данными выполнен с возможностью умножения арксинуса третьего результата вычисления на 2 для получения первого угла поворота рулевого колеса транспортного средства, соответствующего подмножеству испытательных данных.
[0106] Согласно варианту осуществления, оборудование дополнительно включает в себя третий блок получения, четвертый блок получения, третий блок вычисления и блок определения величины коррекции.
[0107] Третий блок получения выполнен с возможностью получения, когда транспортное средство движется нормально, второго угла поворота рулевого колеса транспортного средства в целевой период времени, где флуктуация второго угла поворота рулевого колеса транспортного средства в течение целевого периода времени находится в заранее заданном диапазоне.
[0108] Четвертый блок получения выполнен с возможностью получения второй скорости транспортного средства и второй угловой скорости рулевого колеса транспортного средства в целевой период времени.
[0109] Третий блок вычисления выполнен с возможностью вычисления третьего угла поворота рулевого колеса транспортного средства на основании второй скорости транспортного средства и второй угловой скорости рулевого колеса транспортного средства.
[0110] Блок определения величины коррекции выполнен с возможностью определения величины коррекции угла поворота рулевого колеса транспортного средства на основании второго угла поворота рулевого колеса транспортного средства в целевой период времени и третьего угла поворота рулевого колеса транспортного средства.
[0111] Согласно варианту осуществления, оборудование дополнительно включает в себя блок коррекции.
[0112] Блок коррекции выполнен с возможностью коррекции, в момент времени после целевого периода времени, второго угла поворота рулевого колеса транспортного средства на основании величины коррекции угла поворота рулевого колеса транспортного средства.
[0113] Согласно варианту осуществления, третий блок вычисления включает в себя: четвертый подблок вычисления, пятый подблок вычисления, шестой подблок вычисления и третий подблок оперирования данными.
[0114] Четвертый подблок вычисления выполнен с возможностью вычисления произведения второй угловой скорости рулевого колеса транспортного средства, круговой постоянной и расстояния между передним и задним мостами транспортного средства для получения четвертого результата вычисления.
[0115] Пятый подблок вычисления выполнен с возможностью умножения второй скорости транспортного средства на 360 для получения пятого результата вычисления.
[0116] Шестой подблок вычисления выполнен с возможностью деления четвертого результата вычисления на пятый результат вычисления для получения шестого результата вычисления.
[0117] Третий подблок оперирования данными выполнен с возможностью умножения арксинуса шестого результата вычисления на 2 для получения третьего угла поворота рулевого колеса транспортного средства.
[0118] Согласно варианту осуществления, оборудование дополнительно включает в себя блок ограничения.
[0119] Блок ограничения выполнен с возможностью инициирования сигнала ограничения рулевого колеса при определении, что абсолютное значение второго угла поворота рулевого колеса транспортного средства превышает заранее заданный порог.
[0120] Согласно вариантам осуществления настоящего изобретения, получение испытательных данных транспортного средства осуществляется, когда транспортное средство движется в заранее заданном порядке движения; для каждого подмножества испытательных данных вычисляется первый угол поворота рулевого колеса транспортного средства, соответствующий подмножеству; соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства получается путем осуществления процесса аппроксимации на первом значении кодового датчика положения рулевого колеса в каждом подмножестве испытательных данных и первом угле поворота рулевого колеса транспортного средства, соответствующем подмножеству; Второе значение кодового датчика положения рулевого колеса получается, когда транспортное средство движется нормально; и второй угол поворота рулевого колеса транспортного средства, соответствующий второму значению кодового датчика положения рулевого колеса, получается на основании соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства. Согласно вариантам осуществления настоящего изобретения, соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства получается путем осуществления процесса аппроксимации на полученных испытательных данных транспортного средства. Второе значение кодового датчика положения рулевого колеса получается, когда транспортное средство движется нормально. Затем второй угол поворота рулевого колеса транспортного средства определяется на основании полученного соответствующего соотношения. Следовательно, второй угол поворота рулевого колеса транспортного средства можно получать в реальном времени на основании второго значения кодового датчика положения рулевого колеса, вместо измерения угла поворота рулевого колеса транспортного средства посредством датчика угла поворота рулевого колеса. Следовательно, можно сэкономить на стоимости монтажа и обслуживания датчика угла поворота рулевого колеса. Кроме того, проблему возможного сбоя в нормальном получении угла поворота рулевого колеса транспортного средства системой автоматического вождения вследствие отказа датчика угла поворота рулевого колеса можно решить, повышая эксплуатационную надежность автоматического вождения. Кроме того, благодаря соответствующему соотношению между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства, накопления ошибок вследствие интегрирования по времени можно избежать, что позволяет добиться высокой точности угла поворота рулевого колеса транспортного средства, требуемой системой автоматического вождения.
[0121] Устройство для получения угла поворота рулевого колеса транспортного средства дополнительно обеспечивается согласно варианту осуществления настоящего изобретения. Устройство включает в себя память, процессор и компьютерную программу, хранящуюся в памяти и исполняемую процессором. При выполнении компьютерной программы, процессор осуществляет следующий способ.
[0122] Способ включает в себя: получение испытательных данных транспортного средства, когда транспортное средство движется в заранее заданном порядке движения, где испытательные данные состоят из нескольких подмножеств, каждое из которых включает в себя первое значение кодового датчика положения рулевого колеса, первую скорость транспортного средства и первую угловую скорость рулевого колеса транспортного средства; вычисление, для каждого подмножества испытательных данных, первого угла поворота рулевого колеса транспортного средства, соответствующего подмножеству; получение соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства путем осуществления процесса аппроксимации на первом значении кодового датчика положения рулевого колеса в каждом подмножестве испытательных данных и первом угле поворота рулевого колеса транспортного средства, соответствующем подмножеству; получение второго значения кодового датчика положения рулевого колеса, когда транспортное средство движется нормально; и получение второго угла поворота рулевого колеса транспортного средства, соответствующего второму значению кодового датчика положения рулевого колеса, на основании соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства.
[0123] Согласно варианту осуществления, получение испытательных данных транспортного средства, когда транспортное средство движется в заранее заданном порядке движения включает в себя: получение, когда транспортное средство движется в заранее заданном порядке движения, первого значения кодового датчика положения рулевого колеса, сгенерированного кодовым датчиком положения рулевого колеса, первой скорости транспортного средства, собранной модулем спутниковой навигации, и первой угловой скорости рулевого колеса транспортного средства, собранной гироскопическим инерциальным датчиком, где первое значение кодового датчика положения рулевого колеса, первая скорость транспортного средства и первая угловая скорость рулевого колеса транспортного средства, полученные в один и тот же момент времени, образуют подмножество испытательных данных.
[0124] Согласно варианту осуществления, вычисление, для каждого подмножества испытательных данных, первого угла поворота рулевого колеса транспортного средства, соответствующего подмножеству включает в себя: вычисление произведения первой угловой скорости рулевого колеса транспортного средства, круговой постоянной и расстояния между передним и задним мостами транспортного средства для получения первого результата вычисления; умножение первой скорости транспортного средства на 360 для получения второго результата вычисления; деление первого результата вычисления на второй результат вычисления для получения третьего результата вычисления; и умножение арксинуса третьего результата вычисления на 2 для получения первого угла поворота рулевого колеса транспортного средства, соответствующего подмножеству испытательных данных.
[0125] Согласно варианту осуществления, способ дополнительно включает в себя: получение, когда транспортное средство движется нормально, второго угла поворота рулевого колеса транспортного средства в целевой период времени, где флуктуация второго угла поворота рулевого колеса транспортного средства в течение целевого периода времени находится в заранее заданном диапазоне; получение второй скорости транспортного средства и второй угловой скорости рулевого колеса транспортного средства в целевой период времени; вычисление третьего угла поворота рулевого колеса транспортного средства на основании второй скорости транспортного средства и второй угловой скорости рулевого колеса транспортного средства; и определение величины коррекции угла поворота рулевого колеса транспортного средства на основании второго угла поворота рулевого колеса транспортного средства в целевой период времени и третьего угла поворота рулевого колеса транспортного средства.
[0126] Согласно варианту осуществления, способ дополнительно включает в себя: корректировку, в момент времени после целевого периода времени, второго угла поворота рулевого колеса транспортного средства на основании величины коррекции угла поворота рулевого колеса транспортного средства.
[0127] Согласно варианту осуществления, вычисление третьего угла поворота рулевого колеса транспортного средства на основании второй скорости транспортного средства и второй угловой скорости рулевого колеса транспортного средства включает в себя: вычисление произведения второй угловой скорости рулевого колеса транспортного средства, круговой постоянной и расстояния между передним и задним мостами транспортного средства для получения четвертого результата вычисления; умножение второй скорости транспортного средства на 360 для получения пятого результата вычисления; деление четвертого результата вычисления на пятый результат вычисления для получения шестого результата вычисления; и умножение арксинуса шестого результата вычисления на 2 для получения третьего угла поворота рулевого колеса транспортного средства.
[0128] Согласно варианту осуществления, способ дополнительно включает в себя: инициирование сигнала ограничения рулевого колеса при определении, что абсолютное значение второго угла поворота рулевого колеса транспортного средства превышает заранее заданный порог.
[0129] Согласно вариантам осуществления настоящего изобретения, получение испытательных данных транспортного средства осуществляется, когда транспортное средство движется в заранее заданном порядке движения; для каждого подмножества испытательных данных вычисляется первый угол поворота рулевого колеса транспортного средства, соответствующий подмножеству; соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства получается путем осуществления процесса аппроксимации на первом значении кодового датчика положения рулевого колеса в каждом подмножестве испытательных данных и первом угле поворота рулевого колеса транспортного средства, соответствующем подмножеству; второе значение кодового датчика положения рулевого колеса получается, когда транспортное средство движется нормально; и второй угол поворота рулевого колеса транспортного средства, соответствующий второму значению кодового датчика положения рулевого колеса, получается на основании соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства. Согласно вариантам осуществления настоящего изобретения, соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства получается путем осуществления процесса аппроксимации на полученных испытательных данных транспортного средства. Второе значение кодового датчика положения рулевого колеса получается, когда транспортное средство движется нормально. Затем второй угол поворота рулевого колеса транспортного средства определяется на основании полученного соответствующего соотношения. Следовательно, второй угол поворота рулевого колеса транспортного средства можно получать в реальном времени на основании второго значения кодового датчика положения рулевого колеса, вместо измерения угла поворота рулевого колеса транспортного средства посредством датчика угла поворота рулевого колеса. Следовательно, можно сэкономить на стоимости монтажа и обслуживания датчика угла поворота рулевого колеса. Кроме того, проблему возможного сбоя в нормальном получении угла поворота рулевого колеса транспортного средства системой автоматического вождения вследствие отказа датчика угла поворота рулевого колеса можно решить, повышая эксплуатационную надежность автоматического вождения. Кроме того, благодаря соответствующему соотношению между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства, накопления ошибок вследствие интегрирования по времени можно избежать, что позволяет добиться высокой точности угла поворота рулевого колеса транспортного средства, требуемой системой автоматического вождения.
[0130] Кроме того, считываемый компьютером носитель данных дополнительно обеспечивается согласно варианту осуществления настоящего изобретения. На считываемом компьютером носителе данных хранятся инструкции. Инструкции, при выполнении оконечным устройством, предписывают оконечному устройству реализовать следующий способ.
[0131] Способ включает в себя: получение испытательных данных транспортного средства, когда транспортное средство движется в заранее заданном порядке движения, где испытательные данные состоят из нескольких подмножеств, каждое из которых включает в себя первое значение кодового датчика положения рулевого колеса, первую скорость транспортного средства и первую угловую скорость рулевого колеса транспортного средства; вычисление, для каждого подмножества испытательных данных, первого угла поворота рулевого колеса транспортного средства, соответствующего подмножеству; получение соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства путем осуществления процесса аппроксимации на первом значении кодового датчика положения рулевого колеса в каждом подмножестве испытательных данных и первом угле поворота рулевого колеса транспортного средства, соответствующем подмножеству; получение второго значения кодового датчика положения рулевого колеса, когда транспортное средство движется нормально; и получение второго угла поворота рулевого колеса транспортного средства, соответствующего второму значению кодового датчика положения рулевого колеса, на основании соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства.
[0132] Согласно варианту осуществления, получение испытательных данных транспортного средства, когда транспортное средство движется в заранее заданном порядке движения включает в себя: получение, когда транспортное средство движется в заранее заданном порядке движения, первого значения кодового датчика положения рулевого колеса, сгенерированного кодовым датчиком положения рулевого колеса, первой скорости транспортного средства, собранной модулем спутниковой навигации, и первой угловой скорости рулевого колеса транспортного средства, собранной гироскопическим инерциальным датчиком, где первое значение кодового датчика положения рулевого колеса, первая скорость транспортного средства и первая угловая скорость рулевого колеса транспортного средства, полученные в один и тот же момент времени, образуют подмножество испытательных данных.
[0133] Согласно варианту осуществления, вычисление, для каждого подмножества испытательных данных, первого угла поворота рулевого колеса транспортного средства, соответствующего подмножеству включает в себя: вычисление произведения первой угловой скорости рулевого колеса транспортного средства, круговой постоянной и расстояния между передним и задним мостами транспортного средства для получения первого результата вычисления; умножение первой скорости транспортного средства на 360 для получения второго результата вычисления; деление первого результата вычисления на второй результат вычисления для получения третьего результата вычисления; и умножение арксинуса третьего результата вычисления на 2 для получения первого угла поворота рулевого колеса транспортного средства, соответствующего подмножеству испытательных данных.
[0134] Согласно варианту осуществления, способ дополнительно включает в себя: получение, когда транспортное средство движется нормально, второго угла поворота рулевого колеса транспортного средства в целевой период времени, где флуктуация второго угла поворота рулевого колеса транспортного средства в течение целевого периода времени находится в заранее заданном диапазоне; получение второй скорости транспортного средства и второй угловой скорости рулевого колеса транспортного средства в целевой период времени; вычисление третьего угла поворота рулевого колеса транспортного средства на основании второй скорости транспортного средства и второй угловой скорости рулевого колеса транспортного средства; и определение величины коррекции угла поворота рулевого колеса транспортного средства на основании второго угла поворота рулевого колеса транспортного средства в целевой период времени и третьего угла поворота рулевого колеса транспортного средства.
[0135] Согласно варианту осуществления, способ дополнительно включает в себя: корректировку, в момент времени после целевого периода времени, второго угла поворота рулевого колеса транспортного средства на основании величины коррекции угла поворота рулевого колеса транспортного средства.
[0136] Согласно варианту осуществления, вычисление третьего угла поворота рулевого колеса транспортного средства на основании второй скорости транспортного средства и второй угловой скорости рулевого колеса транспортного средства включает в себя: вычисление произведения второй угловой скорости рулевого колеса транспортного средства, круговой постоянной и расстояния между передним и задним мостами транспортного средства для получения четвертого результата вычисления; умножение второй скорости транспортного средства на 360 для получения пятого результата вычисления; деление четвертого результата вычисления на пятый результат вычисления для получения шестого результата вычисления; и умножение арксинуса шестого результата вычисления на 2 для получения третьего угла поворота рулевого колеса транспортного средства.
[0137] Согласно варианту осуществления, способ дополнительно включает в себя: инициирование сигнала ограничения рулевого колеса при определении, что абсолютное значение второго угла поворота рулевого колеса транспортного средства превышает заранее заданный порог.
[0138] Согласно вариантам осуществления настоящего изобретения, получение испытательных данных транспортного средства осуществляется, когда транспортное средство движется в заранее заданном порядке движения; для каждого подмножества испытательных данных вычисляется первый угол поворота рулевого колеса транспортного средства, соответствующий подмножеству; соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства получается путем осуществления процесса аппроксимации на первом значении кодового датчика положения рулевого колеса в каждом подмножестве испытательных данных и первом угле поворота рулевого колеса транспортного средства, соответствующем подмножеству; второе значение кодового датчика положения рулевого колеса получается, когда транспортное средство движется нормально; и второй угол поворота рулевого колеса транспортного средства, соответствующий второму значению кодового датчика положения рулевого колеса, получается на основании соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства. Согласно вариантам осуществления настоящего изобретения, соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства получается путем осуществления процесса аппроксимации на полученных испытательных данных транспортного средства. Второе значение кодового датчика положения рулевого колеса получается, когда транспортное средство движется нормально. Затем второй угол поворота рулевого колеса транспортного средства определяется на основании полученного соответствующего соотношения. Следовательно, второй угол поворота рулевого колеса транспортного средства можно получать в реальном времени на основании второго значения кодового датчика положения рулевого колеса, вместо измерения угла поворота рулевого колеса транспортного средства посредством датчика угла поворота рулевого колеса. Следовательно, можно сэкономить на стоимости монтажа и обслуживания датчика угла поворота рулевого колеса. Кроме того, проблему возможного сбоя в нормальном получении угла поворота рулевого колеса транспортного средства системой автоматического вождения вследствие отказа датчика угла поворота рулевого колеса можно решить, повышая эксплуатационную надежность автоматического вождения. Кроме того, благодаря соответствующему соотношению между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства, накопления ошибок вследствие интегрирования по времени можно избежать, что позволяет добиться высокой точности угла поворота рулевого колеса транспортного средства, требуемой системой автоматического вождения.
[0139] Следует отметить, что варианты осуществления в этом описании изобретения описаны прогрессивным образом. Каждый из вариантов осуществления фокусируется на отличиях от других вариантов осуществления, и одинаковые и аналогичные части вариантов осуществления могут ссылаться друг на друга. Описание системы и оборудование, раскрытое в вариантах осуществления, является краткими, поскольку система и оборудование соответствуют способу, раскрытому в вариантах осуществления. Ссылка может применяться к соответствующему описанию способа для деталей системы и оборудования.
[0140] Следует понимать, что в настоящем изобретении термин ʺпо меньшей мере одинʺ означает количество один или более, и термин ʺнесколькоʺ означает количество два или более. Термин ʺи/илиʺ используется для описания связи объектов и указывает три возможных связи. Например, ʺА и/или Вʺ может указывать случай, когда только А, случай, когда только В, и случай, когда оба А и В, где А и В могут быть в форме единственного числа или в форме множественного числа. Символ ʺ/ʺ в общем случае указывает отношение ʺилиʺ между связанными объектами. Выражение ʺпо меньшей мере один из…ʺ или аналогичное выражение означает ʺлюбая комбинация из…ʺ, в том числе любую комбинацию, состоящую из единственного элемента или нескольких элементов. Например, ʺпо меньшей мере один из a, b или сʺ может указывать: ʺаʺ, ʺbʺ, ʺсʺ, ʺа и bʺ, ʺа и сʺ, ʺb и сʺ, или ʺа, b и сʺ, где a, b и с могут быть в форме единственного числа или в форме множественного числа.
[0141] Следует дополнительно отметить, что такие реляционные термины, как ʺпервыйʺ, ʺвторойʺ и т.п. используются здесь только для того, чтобы отличать один компонент или операцию от другого компонента или операции, а не требовать или предполагать любое фактическое соотношение или порядок компонентов или операций. Кроме того, термины ʺвключают в себяʺ, ʺсодержатʺ или любые их варианты призваны быть не исключительными, чтобы процесс, способ, изделие или устройство, которое включает в себя ряд элементов, включало в себя не только перечисленные элементы, но и другие элементы, которые явно не перечислены, или другие элементы, которые свойственны такому процессу, способу, изделию или устройство. В отсутствие других явных ограничений, процесс, способ, изделие или устройство, ограниченное ʺ содержащий/включающий в себя не исключает наличия другого идентичного элемента в таком процессе, способе, изделии или устройстве.
[0142] Этапы способа, описанные здесь в связи с вариантами осуществления настоящего изобретения, могут быть реализованы в виде аппаратного обеспечения, программного модуля, исполняемого процессором, или их комбинации. Программный модуль может храниться в оперативной памяти (RAM), памяти, постоянной памяти (ROM), электрически программируемой ROM, электрически стираемой программируемой ROM, регистре, на жестком диске, сменном магнитном диске, CD-ROM, или любых других формах носителя данных, известных в технике.
[0143] Специалисты в данной области техники могут реализовать или применять настоящее изобретение на основании вышеизложенных описаний раскрытых вариантов осуществления. Специалисты в данной области техники могут предложить различные модификации вариантов осуществления, и общие принципы, заданные в настоящем изобретении, можно реализовать в других вариантах осуществления, не выходя за рамки сущности или объема настоящего изобретения. Таким образом, настоящее изобретение не подлежит ограничению описанными здесь вариантами осуществления, но подлежит рассмотрению в самом широком объеме, согласующемся с принципами и признаками новизны, раскрытыми в этом описании изобретения.
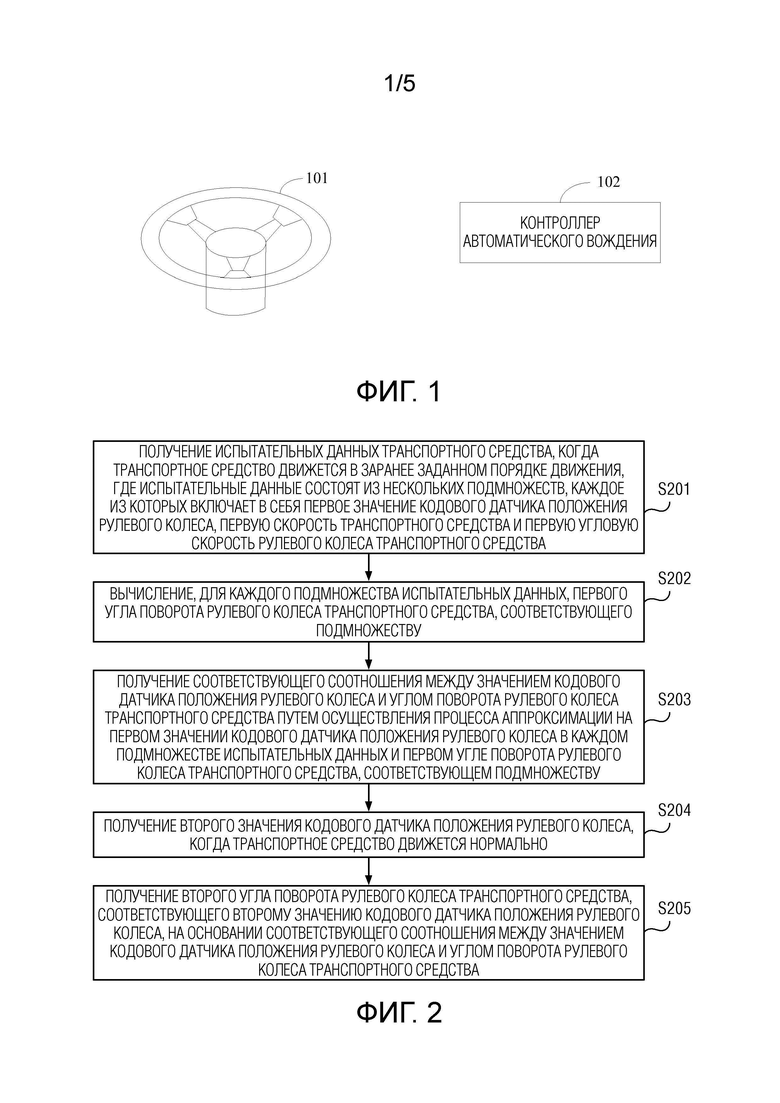
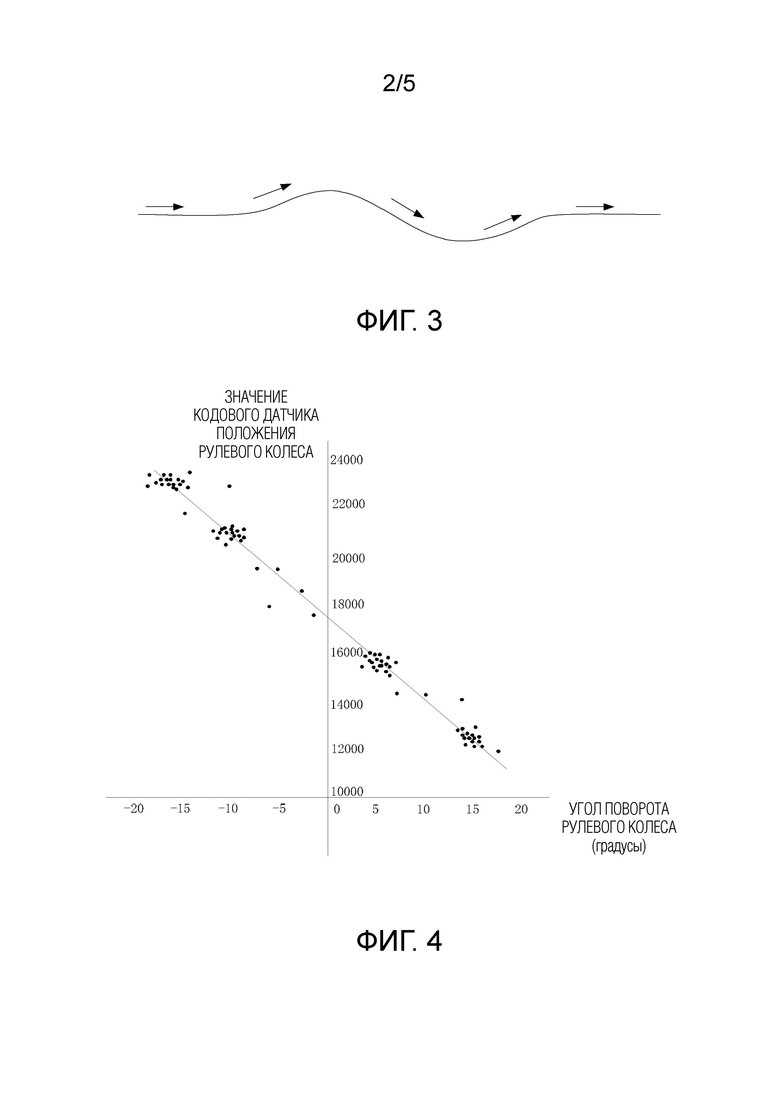
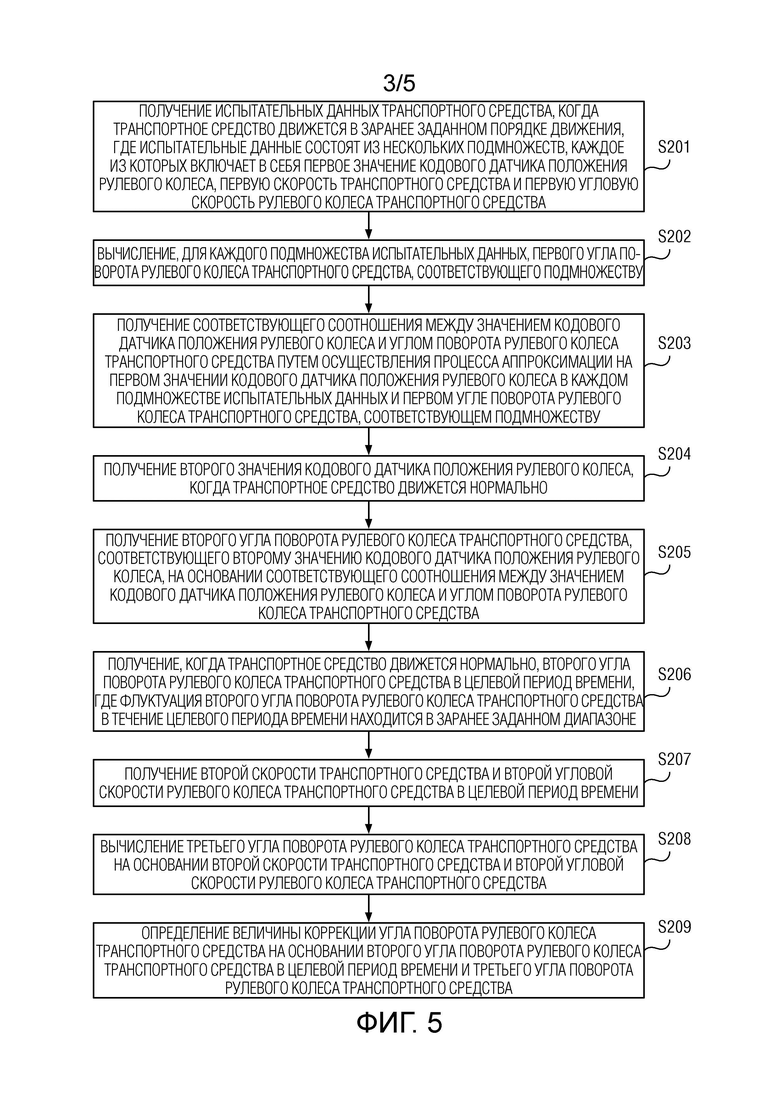
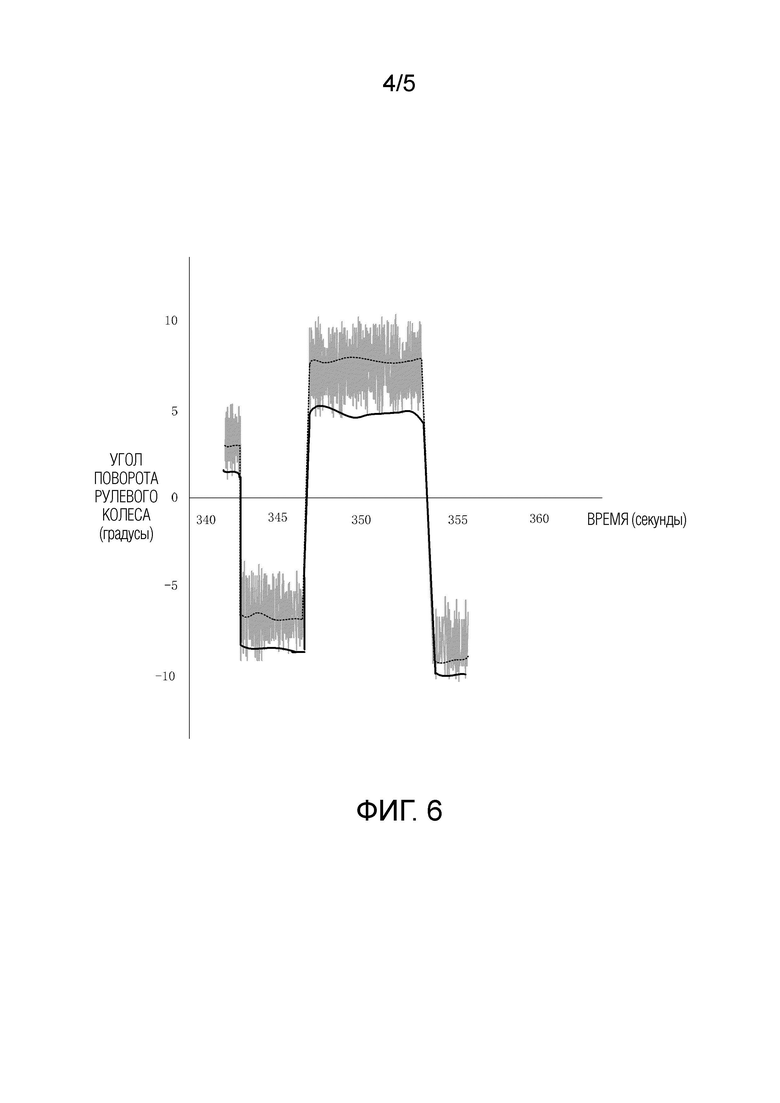
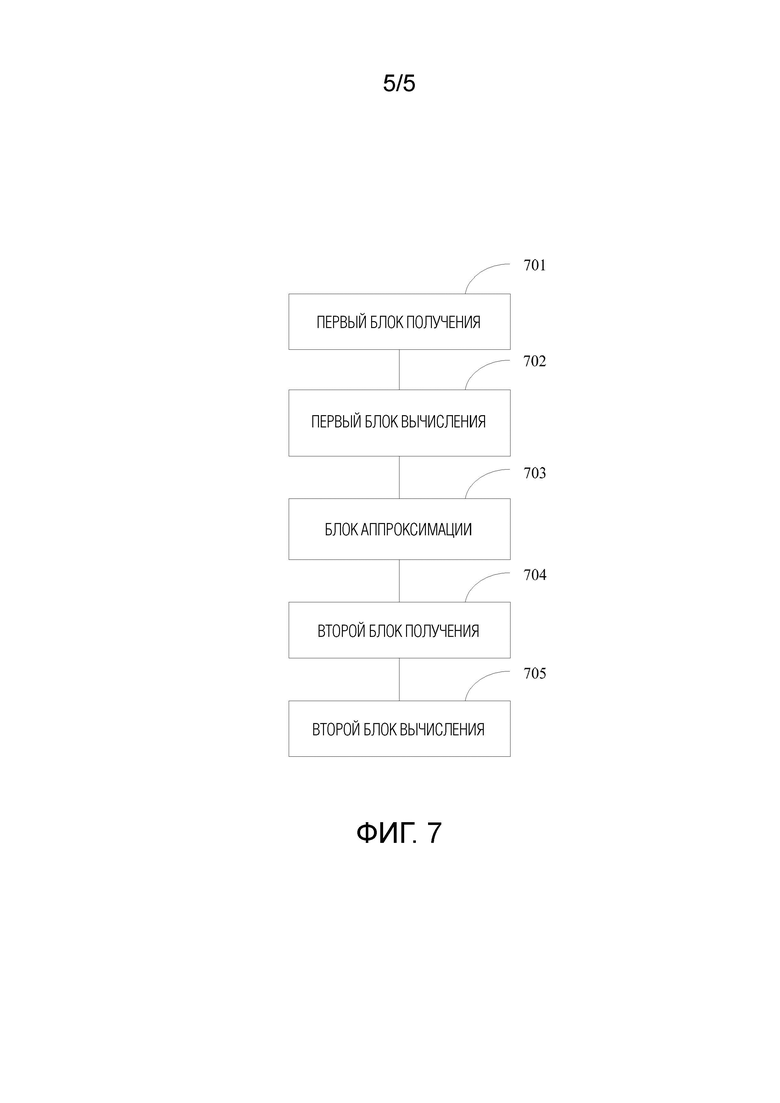
Группа изобретений относится к области техники автоматического вождения и, в частности, к способу и оборудованию для получения угла поворота рулевого колеса транспортного средства, устройству и носителю данных. Способ получения угла поворота рулевого колеса транспортного средства содержит, когда транспортное средство движется согласно заранее заданному режиму, получение испытательных данных транспортного средства и вычисление данных первого угла поворота рулевого колеса транспортного средства, соответствующих каждому фрагменту испытательных данных транспортного средства; использование первых данных кодового датчика положения рулевого колеса в испытательных данных транспортного средства, а также соответствующих данных первого угла поворота рулевого колеса транспортного средства и осуществление аппроксимации, и получение отношения соответствия между данными кодового датчика положения рулевого колеса и данными угла поворота рулевого колеса транспортного средства. Когда транспортное средство движется нормально, получение вторых данных кодового датчика положения рулевого колеса; и затем получение данных второго угла поворота рулевого колеса транспортного средства, соответствующих вторым данным кодового датчика положения рулевого колеса согласно отношению соответствия между данными кодового датчика положения рулевого колеса и данными угла поворота рулевого колеса транспортного средства. Обеспечивается возможность сэкономить на стоимости монтажа и обслуживания датчика угла поворота рулевого колеса, повысить точность данных угла поворота рулевого колеса транспортного средства и повысить эксплуатационную надежность автоматического вождения. 4 н. и 6 з.п. ф-лы, 7 ил.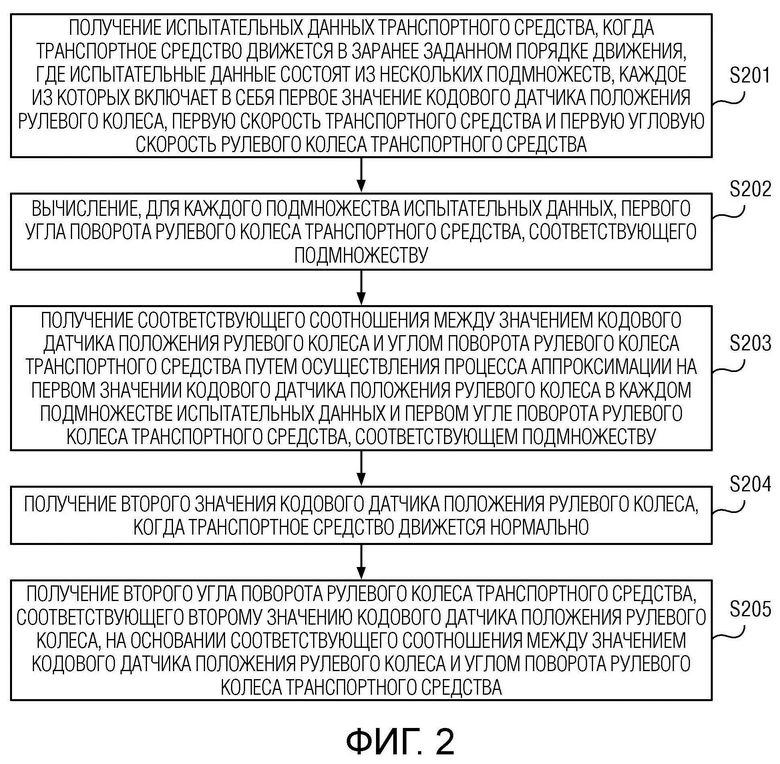
1. Способ получения угла поворота рулевого колеса транспортного средства, содержащий этапы, на которых:
получают испытательные данные транспортного средства, когда транспортное средство движется в заранее заданном порядке движения, причем испытательные данные состоят из нескольких подмножеств, каждое из которых содержит первое значение кодового датчика положения рулевого колеса, первую скорость транспортного средства и первую угловую скорость рулевого колеса транспортного средства;
вычисляют, для каждого подмножества испытательных данных, первый угол поворота рулевого колеса транспортного средства, соответствующий подмножеству;
получают соответствующее соотношение между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства путем осуществления процесса аппроксимации на первом значении кодового датчика положения рулевого колеса в каждом подмножестве испытательных данных и первом угле поворота рулевого колеса транспортного средства, соответствующем подмножеству;
получают второе значение кодового датчика положения рулевого колеса, когда транспортное средство движется нормально; и
получают второй угол поворота рулевого колеса транспортного средства, соответствующий второму значению кодового датчика положения рулевого колеса, на основании соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства.
2. Способ по п. 1, в котором получение испытательных данных транспортного средства, когда транспортное средство движется в заранее заданном порядке движения, содержит этап, на котором:
получают, когда транспортное средство движется в заранее заданном порядке движения, первое значение кодового датчика положения рулевого колеса, сгенерированное кодовым датчиком положения рулевого колеса, первую скорость транспортного средства, собранную модулем спутниковой навигации, и первую угловую скорость рулевого колеса транспортного средства, собранную гироскопическим инерциальным датчиком, причем
первое значение кодового датчика положения рулевого колеса, первая скорость транспортного средства и первая угловая скорость рулевого колеса транспортного средства, полученные в один и тот же момент времени, образуют одно и то же подмножество испытательных данных.
3. Способ по п. 1 или 2, в котором вычисление, для каждого подмножества испытательных данных, первого угла поворота рулевого колеса транспортного средства, соответствующего подмножеству, содержит этапы, на которых:
вычисляют произведение первой угловой скорости рулевого колеса транспортного средства, круговой постоянной и расстояния между передним и задним мостами транспортного средства для получения первого результата вычисления;
умножают первую скорость транспортного средства на 360 для получения второго результата вычисления;
делят первый результат вычисления на второй результат вычисления для получения третьего результата вычисления; и
умножают арксинус третьего результата вычисления на 2 для получения первого угла поворота рулевого колеса транспортного средства, соответствующего подмножеству испытательных данных.
4. Способ по п. 1, дополнительно содержащий этапы, на которых:
получают, когда транспортное средство движется нормально, второй угол поворота рулевого колеса транспортного средства в целевой период времени, причем флуктуация второго угла поворота рулевого колеса транспортного средства в течение целевого периода времени находится в заранее заданном диапазоне;
получают вторую скорость транспортного средства и вторую угловую скорость рулевого колеса транспортного средства в целевой период времени;
вычисляют третий угол поворота рулевого колеса транспортного средства на основании второй скорости транспортного средства и второй угловой скорости рулевого колеса транспортного средства; и
определяют величину коррекции угла поворота рулевого колеса транспортного средства на основании второго угла поворота рулевого колеса транспортного средства в целевой период времени и третьего угла поворота рулевого колеса транспортного средства.
5. Способ по п. 4, дополнительно содержащий этапы, на которых:
корректируют, в момент времени после целевого периода времени, второй угол поворота рулевого колеса транспортного средства на основании величины коррекции угла поворота рулевого колеса транспортного средства.
6. Способ по п. 4, в котором вычисление третьего угла поворота рулевого колеса транспортного средства на основании второй скорости транспортного средства и второй угловой скорости рулевого колеса транспортного средства содержит этапы, на которых:
вычисляют произведение второй угловой скорости рулевого колеса транспортного средства, круговой постоянной и расстояния между передним и задним мостами транспортного средства для получения четвертого результата вычисления;
умножают вторую скорость транспортного средства на 360 для получения пятого результата вычисления;
делят четвертый результат вычисления на пятый результат вычисления для получения шестого результата вычисления; и
умножают арксинус шестого результата вычисления на 2 для получения третьего угла поворота рулевого колеса транспортного средства.
7. Способ по п. 1, дополнительно содержащий этап, на котором:
инициируют сигнал ограничения рулевого колеса при определении, что абсолютное значение второго угла поворота рулевого колеса транспортного средства превышает заранее заданный порог.
8. Оборудование для получения угла поворота рулевого колеса транспортного средства, содержащее:
первый блок получения, выполненный с возможностью получения испытательных данных транспортного средства, когда транспортное средство движется в заранее заданном порядке движения, причем испытательные данные состоят из нескольких подмножеств, каждое из которых содержит первое значение кодового датчика положения рулевого колеса, первую скорость транспортного средства и первую угловую скорость рулевого колеса транспортного средства;
первый блок вычисления, выполненный с возможностью вычисления, для каждого подмножества испытательных данных, первого угла поворота рулевого колеса транспортного средства, соответствующего подмножеству;
блок аппроксимации, выполненный с возможностью получения соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства путем осуществления процесса аппроксимации на первом значении кодового датчика положения рулевого колеса в каждом подмножестве испытательных данных и первом угле поворота рулевого колеса транспортного средства, соответствующем подмножеству;
второй блок получения, выполненный с возможностью получения второго значения кодового датчика положения рулевого колеса, когда транспортное средство движется нормально; и
второй блок вычисления, выполненный с возможностью получения второго угла поворота рулевого колеса транспортного средства, соответствующего второму значению кодового датчика положения рулевого колеса, на основании соответствующего соотношения между значением кодового датчика положения рулевого колеса и углом поворота рулевого колеса транспортного средства.
9. Устройство для получения угла поворота рулевого колеса транспортного средства, содержащее:
память,
процессор и
компьютерные инструкции, хранящиеся в памяти и исполнимые процессором, причем
процессор выполнен с возможностью выполнения компьютерных инструкций для осуществления способа получения угла поворота рулевого колеса транспортного средства по любому из пп. 1-7.
10. Считываемый компьютером носитель данных, хранящий инструкции, при этом инструкции, при выполнении оконечным устройством, предписывают оконечному устройству осуществлять способ получения угла поворота рулевого колеса транспортного средства по любому из пп. 1-7.
| ТРАВЕРСА ДЛЯ ПРОКЛАДКИ КАБЕЛЕЙ, ТРУБОПРОВОДОВ | 0 |
|
SU400684A1 |
| US 10093347 B2, 09.10.2018 | |||
| CN 203332203 U, 11.12.2013 | |||
| CN 203496981 U, 26.03.2014. | |||

