Заявляемые объекты объединены одним изобретательским замыслом, относятся к радиотехнике и могут быть использованы для защиты от средств воздушного и космического радиомониторинга.
Известны устройства на основе способа активной радиомаскировки (см. Пат. РФ №№2170493, 2224376), основанный на создании наведенных маскирующих шумовых помех во всей полосе используемых частот. Способ обеспечивает защиту информации от доступа к ней посторонних лиц. Основной недостаток способа состоит в невозможности скрыть местоположение защищаемого источника радиоизлучения (ИРИ).
Известен способ активной радиомаскировки (см. Пат. РФ №№2495527, 2525299, 2543078 и др.), основанный на искажении навигационного поля, формируемого глобальной навигационной спутниковой системой (ГНСС). Способ позволяет затруднить определение координат защищаемого объекта. Однако действие аналога не распространяется на ИРИ. Местоположение последних определяется известными способами и устройствами (см., например, Пат. РФ №2659808).
Наиболее близким по технической сущности является способ активной радиомаскировки радиоэлектронных средств станциями активных помех (см. Пат. РФ №2632219, МПК H04K, опубл. 03.10.2017, бюл. №28). В прототипе активную маскировку осуществляют путем излучения, ретрансляции шумовых помех или имитирующих и ложных сигналов, сопряженных и синхронизированных с сигналами маскируемого радиоэлектронного средства (РЭС) таким образом чтобы активные помехи были максимально близкими к параметрам радиоэлектронного средства, формируют активную помеху в виде аддитивной смеси сигналов станции активных помех (САП) и РЭС путем одновременного и синхронного излучения информационных и помеховых сигналов РЭС и САП с возможностью обеспечения как радиомаскировки РЭС станций активных помех, так и радиомаскировки САП радиоэлектронным средством, причем электромагнитную совместимость САП и приемного устройства РЭС обеспечивают соблюдением норм их территориального разноса за счет использования направленной антенны на САП и ориентации диаграммы направленности антенны САП относительно диаграммы направленности антенны радиоприемного устройства РЭС.
Прототип обеспечивает повышение эффективности активной радиомаскировки электромагнитных излучений РЭС за счет сопряжения и синхронизации работы САП и РЭС, затрудняя их анализ и прием средствами космической Р и РТР. Однако, современное развитие методов геолокации в этих условиях позволяет получить раздельные координаты на САП и РЭС (см. Волков Р.В., Севидов В.В. Точность геолокации разностно-дальномерным методом с использованием спутников-ретрансляторов на геостационарной орбите // Известия СПбГЭТУ «ЛЭТИ», №9, 2014, стр. 12-18; Волков Р.В., Саяпин В.Н., Севидов В.В. Алгоритм определения координат земных станций по сигналам спутников-ретрансляторов // Теория и практика современной науки, №10 (16), 2016. Электронный научный журнал).
Целью является разработка способа активной радиомаскировки, обеспечивающего затруднение определения местоположения (ОМП) земной станции (ЗС).
Поставленная цель достигается тем, что в известном способе активной радиомаскировки местоположения ЗС, заключающемся в излучении, ретрансляции шумовых помех или имитирующих и ложных сигналов, сопряженных и синхронизированных с сигналами земной станции, на подготовительном этапе на ЗС выделяют I соседних с используемым спутников-ретрансляторов (CP), i=2, 3, … I, имеющих одинаковые частоты восходящих линий связи, поляризацию антенной системы и зону покрытия, определяют координаты ЗС [X,Y,Z)ЗС и выбранных CP (X,Y,Z)i, направление (θ, β)i на выбранные CP, рассчитывают расстояние между ЗС и спутниками-ретрансляторами, определяют значения  необходимой для излучения мощности помехового сигнала в направлении каждого из выбранных i-тых спутников-ретрансляторов, i=2, 3, … I, а ЗС ССС дополнительно оборудуют I направленными антеннами, которые ориентируют в направлении соответствующих спутников-ретрансляторов, и I-канальным когерентным радиопередатчиком, а в качестве активной маскирующей помехи в I дополнительных каналах радиопередатчик - направленная антенна используют отличные между собой задержанные по псевдослучайному закону и оптимизированные по мощности сигналы ЗС.
необходимой для излучения мощности помехового сигнала в направлении каждого из выбранных i-тых спутников-ретрансляторов, i=2, 3, … I, а ЗС ССС дополнительно оборудуют I направленными антеннами, которые ориентируют в направлении соответствующих спутников-ретрансляторов, и I-канальным когерентным радиопередатчиком, а в качестве активной маскирующей помехи в I дополнительных каналах радиопередатчик - направленная антенна используют отличные между собой задержанные по псевдослучайному закону и оптимизированные по мощности сигналы ЗС.
Перечисленная новая совокупность существенных признаков за счет того, что совместно с излучениями ЗС синхронно с основным сигналом излучают сдвинутые по времени его копии на соседние (выбранные) спутники-ретрансляторы (CP) позволяет достичь цели изобретения. Взаимнокорреляционная функция (ВКФ) совокупности таких сигналов представляет набор как истинных, так и ложных корреляционных пиков. В результате затрудняется определение местоположения ЗС, а, следовательно, достигается цель изобретения: предлагаемый способ не скрывает истинную позицию ЗС, а «маскирует» ее в группе других, ложных позиций.
Известно устройство радиомаскировки (см. Пат. РФ №2170493, МПК H04K 3/00, опубл. 10.07.2001, бюл. №19). Оно содержит генератор шума, выполненный в виде системы связанных двух генераторов, активный антенный контур в виде магнитного диполя, регулируемую линию задержки, источник низкочастотного шума. Устройство обеспечивает повышение стабильности процесса радиомаскировки передаваемой информации во всей полосе используемых частот. Однако аналог не позволяет скрыть местоположение источника радиоизлучения, что ограничивает область его применения.
Известно устройство активной радиомаскировки радиоэлектронных средств станциями активных помех (см. Пат. РФ №2632219, МПК H04K 3/00, опубл. 03.10.2017, бюл. №28). Аналог содержит станцию активных помех, маскируемое радиоэлектронное средство, два устройства сопряжения и синхронизации, соединенные между собой каналами служебной связи. Устройство обеспечивает повышение эффективности активной радиомаскировки РЭС, исключение или значительное затруднение обнаружения излучений как маскируемого РЭС, так и станции активных помех, затруднение определения их местоположения. Однако скрыть местоположение защищаемого РЭС и САП невозможно от современных систем геолокации (см. Пат. 55700 US, GO IS 003/16. TDOA/FDOA technique for locating a transmitter / Desjardins G.A., №138154; Filed Oct. 15, 1993; et al. Oct. 29, 1996). В настоящее время находят широкое применение следующие стандарты и нейм-серверы: ISO 3166, FIPS, INSEE, GtoNames и др.
Наиболее близким по технической сущности является устройство радиомаскировки (см. Пат. РФ №2224376, МПК H04K 3/00, Н03В 29/00, опубл. 20.02.2004, бюл. №5). Устройство радиомаскировки содержит последовательно соединенные генератор шума, разветвитель на I, I буферных каскадов, I-канальный радиопередатчик и блок из I антенн.
Устройство обеспечивает повышение эффективности радиомаскировки путем создания наведенных маскирующих шумовых помех и формирование электромагнитного поля в пространства. Однако прототипу, так же как и аналогам, присущ общий недостаток: обеспечивает защиту только передаваемой на объекте информации. При этом определение координат объекта по источникам радиоизлучения трудностей не вызывает.
Целью является разработка устройства активной радиомаскировки местоположения ЗС, обеспечивающего затруднение определения ее координат.
Поставленная цель достигается тем, что в устройстве активной радиомаскировки местоположения земной станции, содержащем последовательно соединенными разветвитель, блок буферных каскадов, I-канальный радиопередатчик, i=2, 3, …, I, и блок из I антенн, в блоке антенн используют направленные антенны, каждую из которых соединяют с соответствующим выходом I-канального радиопередатчика, а группа управляющих входов блока направленных антенн является первой входной шиной устройства, предназначена для ориентации I направленных антенн на соответствующие спутники-ретрансляторы, генератор псевдослучайной последовательности (ГПСП), выходы которого соединены с соответствующими входами управления блока буферных каскадов, предназначенного для задержки сигналов ЗС на заданную ГПСП каждому каскаду величину Δτi, вход управления ГПСП является третьей входной шиной устройства, предназначена для задания закона следования псевдослучайной последовательности, информационный вход разветвителя объединен с I+1-м информационным входом I-канального радиопередатчика и является второй входной шиной устройства, по которой поступает значение рабочей полосы частот ΔF и собственно сигналы ЗС S(t), последовательно соединенные блок расчета дистанции связи Ri и блок расчета мощности сигнала , выходы которого соединены с соответствующими управляющими входами I-канального радиопередатчика, I+1-ый информационный вход которого объединен с вторым информационным входом блока расчета мощности сигнала , а группа входов блока расчета дистанции связи Ri является четвертой входной шиной устройства, предназначенной для задания координат ЗС (X,Y,Z)ЗС и соседних выбранных спутников-ретрансляторов (X,Y,Z)i.
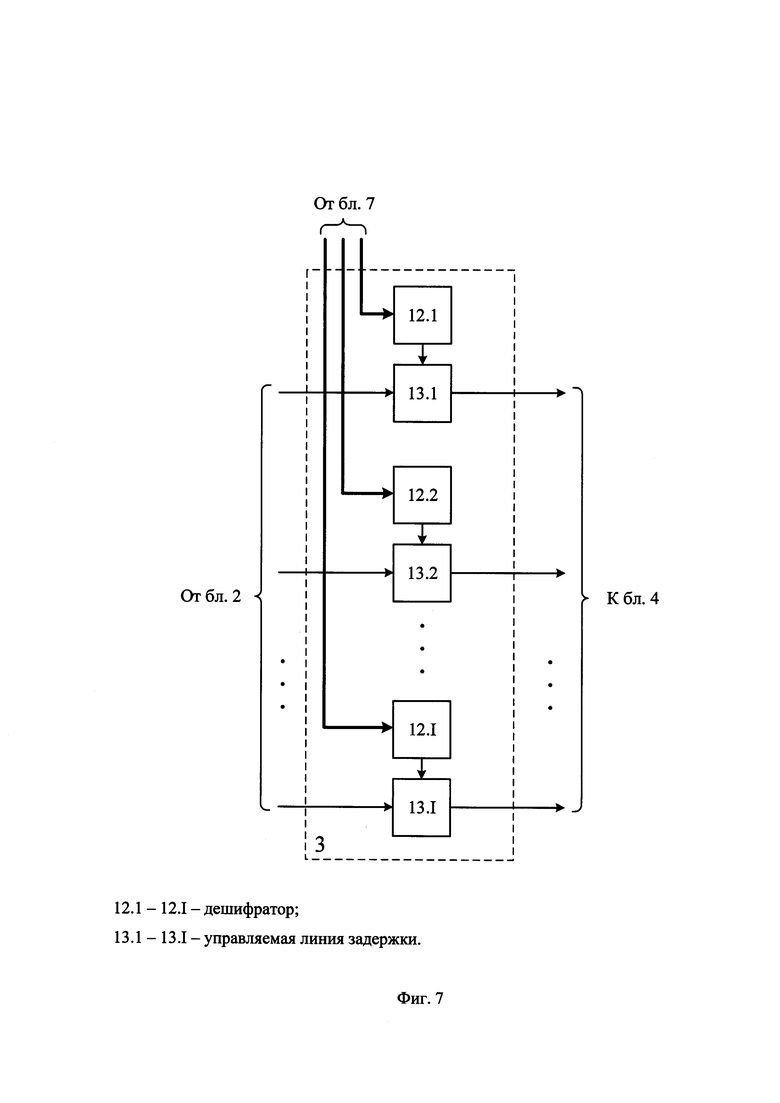
При этом блок буферных каскадов содержит I параллельных каскадов из последовательно соединенных дешифратора и управляемой линии задержки, информационные входы которых являются информационными входами блока буферных каскадов, входы управления которого соединены с информационными входами соответствующих дешифраторов.
Перечисленная новая совокупность существенных признаков за счет введения новых элементов и связей позволяет достичь цели изобретения: разработать устройство активной радиомаскировки местоположения земной станции, обеспечивающего затруднение определения ее координат.
Заявляемые объекты поясняются чертежами, на которых показаны:
на фиг. 1 - схема мультиспутниковой системы спутниковой геолокации (МССГ) при приеме сигналов трех CP;
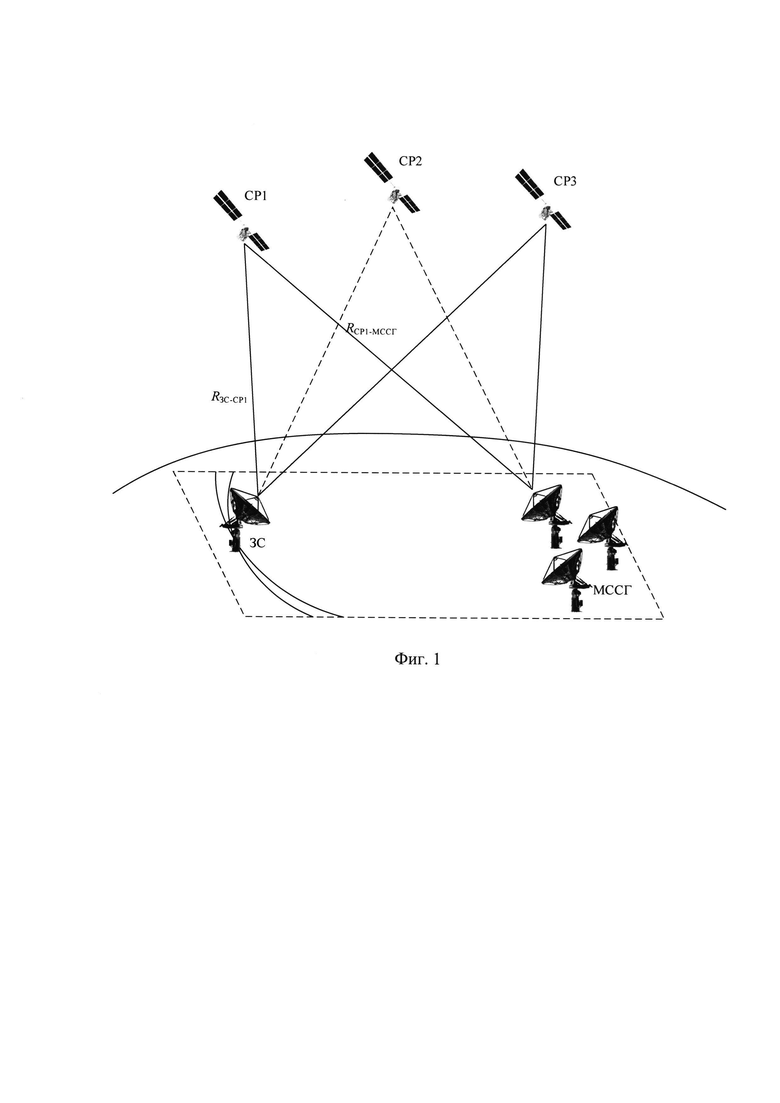
на фиг. 2 - вид взаимнокорреляционной функции, полученный при обработке сигналов основного и смежного (выбранного) CP;
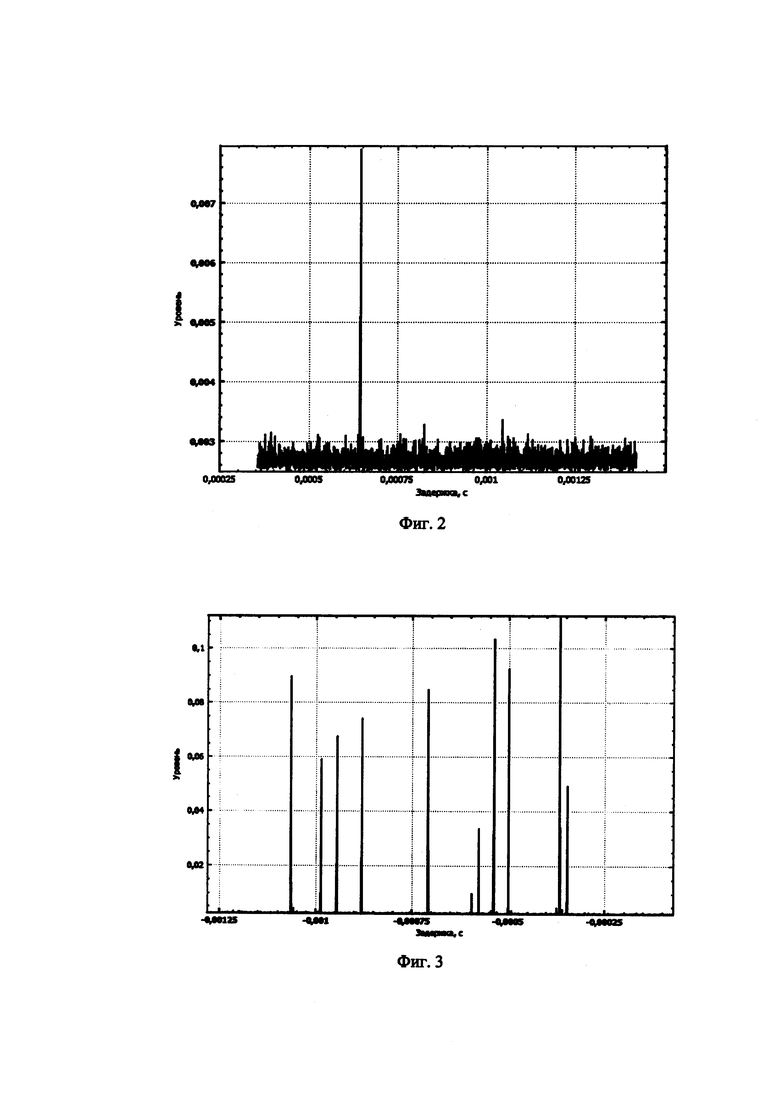
на фиг. 3 - вид взаимнокорреляционной функции, полученный при обработке основного сигнала (защищаемой ЗС) и нескольких сдвинутых его копий;
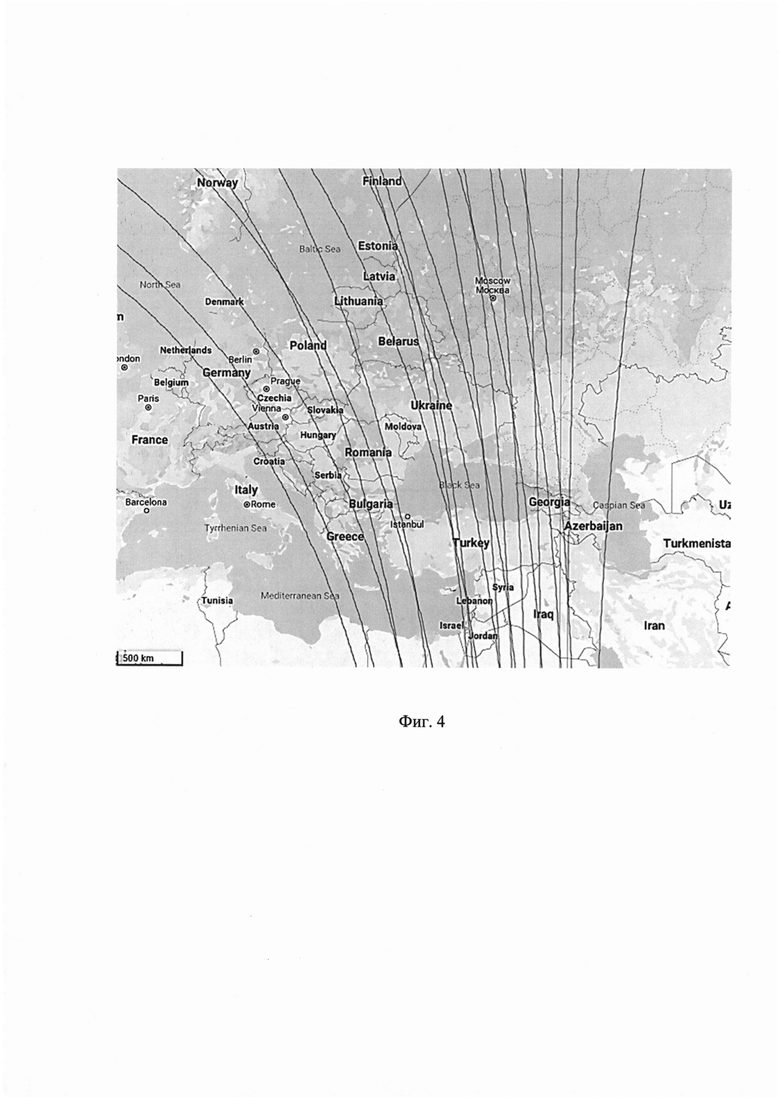
на фиг. 4 - линии положения, полученные по результатам корреляционного анализа;
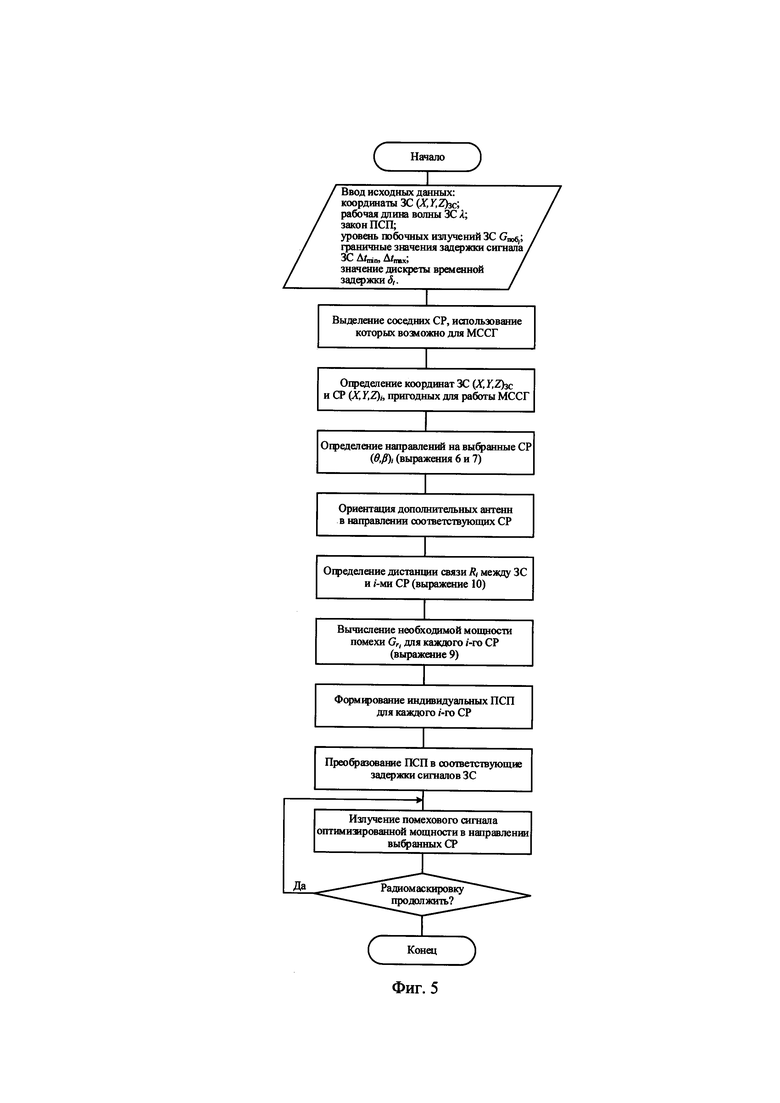
на фиг. 5 - алгоритм формирования сигналов в направлении смежного спутника;
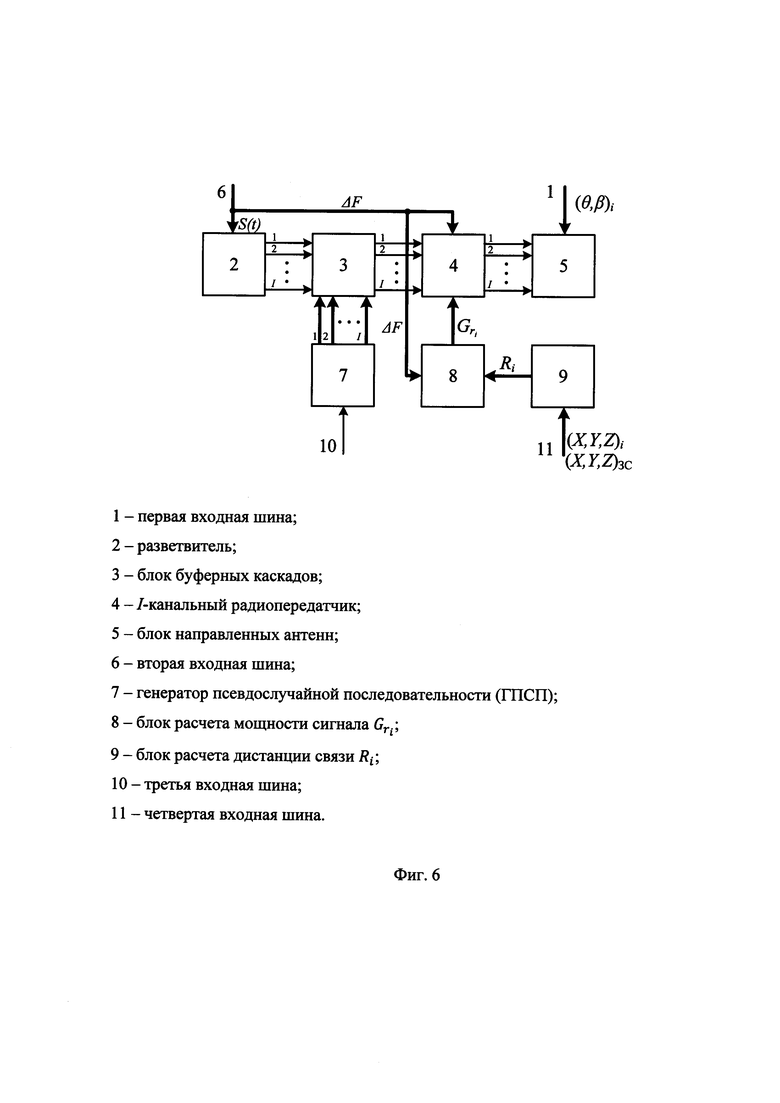
на фиг. 6 - обобщенная структурная схема устройства активной радиомаскировки местоположения земной станции;
на фиг. 7 - структурная схема блока буферных каскадов;
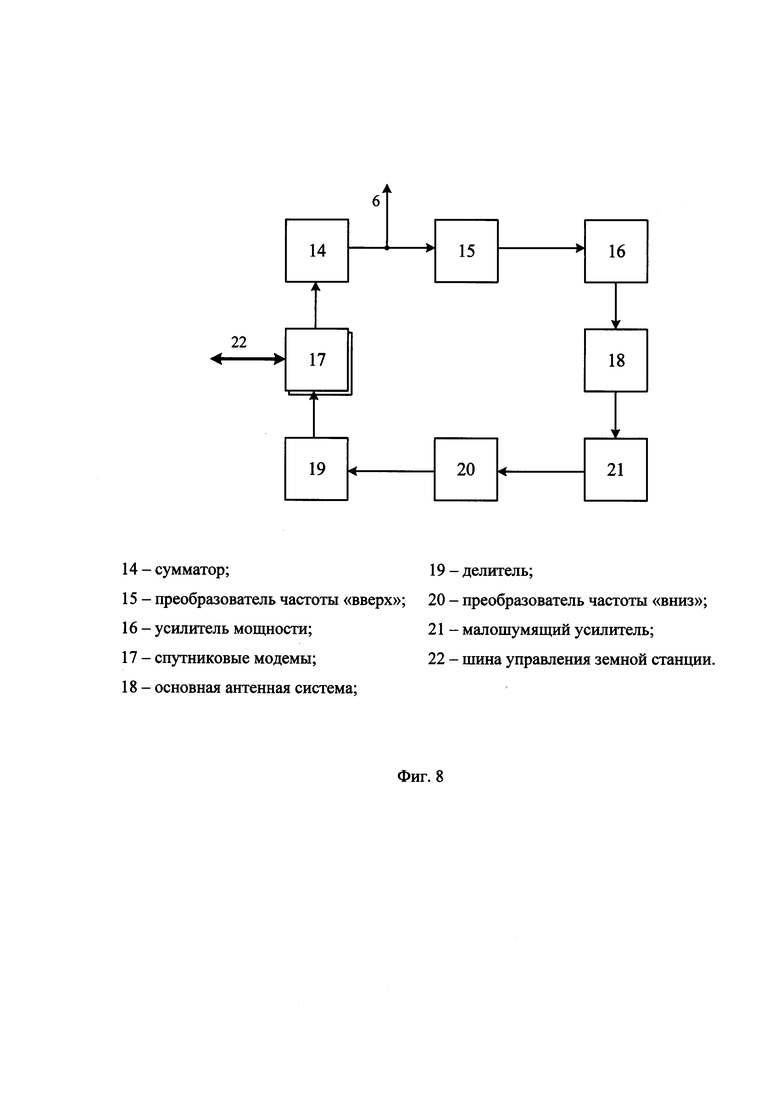
на фиг. 8 - обобщенная структурная схема земной станции;
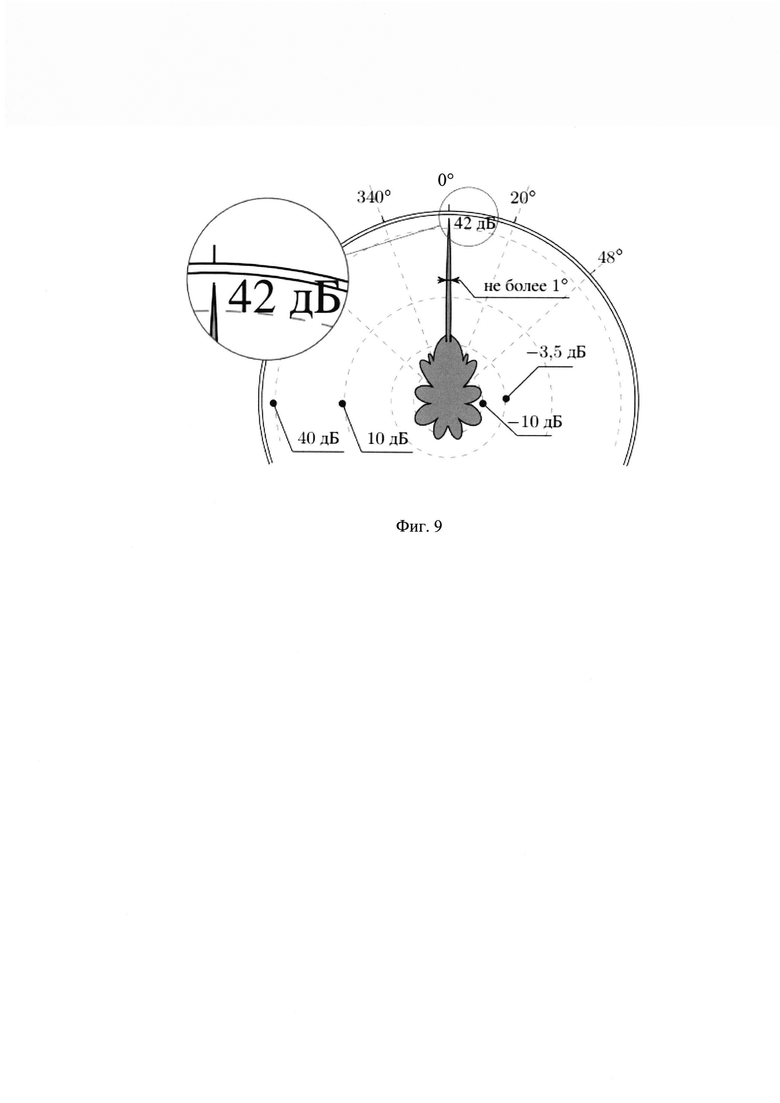
на фиг. 9 - вариант диаграммы направленности в горизонтальной (вертикальной) плоскости для антенны ЗС VSAT;
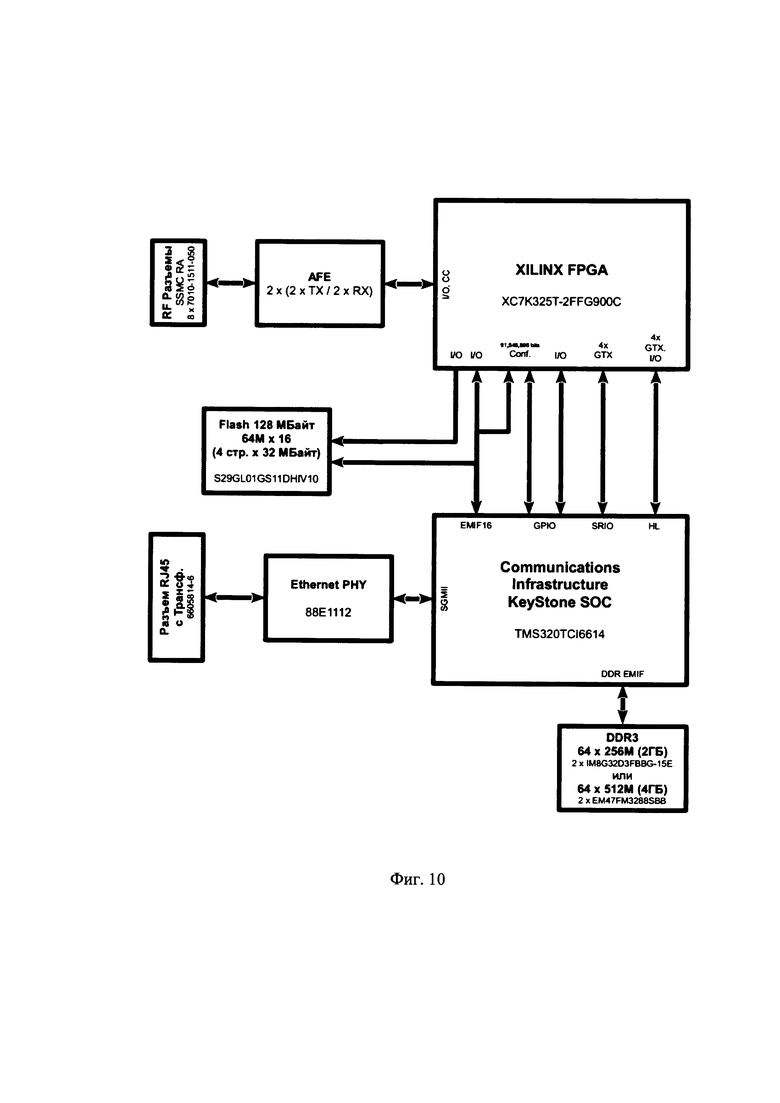
на фиг. 10 - структурная схема цифровой реализации основных элементов устройства активной радиомаскировки местоположения земной станции.
В настоящее время широкое распространение получили мультиспутниковые системы геолокации, использующие два или более CP при определении местоположения ЗС (см. фиг. 1). Для их функционирования необходимо выполнение ряда требований. К последним относятся: наличие как минимум двух дополнительных CP, которые имеют одинаковые частоты восходящей линии связи, поляризацию антенной системы и зону покрытия. Кроме того, МССГ требуют знания точного положения всех задействованных в позиционировании CP (см. Elbert В. Radio Frequency Interference in Communications System. New York: Artech House Publishers, 2016. - 229 p.).
Мультиспутниковая архитектура ССГ определения местоположения ЗС предполагает использование разностно-дальномерного, разностно-доплеровского способов или их комбинаций (см. Chan М. Application of a dual satellite geolocation system on locating sweeping interference // World Academy of Science, Engineering Technology. - 2012. T. 6, №9. - p. 1029-1034). В этом случае CP1 (фиг. 1) будет являться «основным» CP, так как он обеспечивает ретрансляцию сигнала по основному лепестку диаграммы направленности (ДН). Второй и третий CP являются смежными, находятся на некотором удалении от CP1 и способны передавать то же излучение, полученное по боковым лепесткам ДН ЗС, но с большим затуханием и с другой частотой переноса. В результате корреляционной обработки определяют разность хода трасс прохождения сигнала через основной и смежных CP и соответствующую ей временную задержку сигнала Δt

где с - скорость света.
Иначе выражение (1) может быть записано через координаты местоположения ЗС, CP и МССГ
где (хЗС, уЗС, zЗС), (хСР1, уСР1, zСР1), (хМССГ, уМССГ, zМССГ) - соответственно координаты ЗС, СР1, СР2 и МССГ. По уравнениям (1) или (2) на поверхности Земли строят линию положения (гиперболу), проходящую через координаты ЗС. На фиг. 2 приведено значение ВКФ сигналов основного и смежных CP, а величину времени задержки определяют по положению максимума представленной функции. Для определения местоположения ЗС необходимо и достаточно использовать еще один CP на геостационарной орбите, с помощью которого получают еще одну линию положения. Точка пересечения линий положения дает координаты местоположения ЗС.
На фиг. 2 приведены результаты обработки записей сигналов, полученных в результате сеанса связи ЗС с известными координатами с основного (Ямал 202) и одного смежного (Экспресс АМ7) CP на частоте 3936 МГц. По оси Y представлено значение нормированного коэффициента корреляции к среднему уровню шума в полосе излучения, а по оси X - взаимная временная задержка сигналов. Корреляционная функция имеет один максимум, соответствующий разности хода сигнала ЗС.
Сущность заявляемого способа состоит в том, чтобы в ВКФ, полученной на МССГ сформировать совокупность дополнительных (ложных) равнозначных максимумов, затрудняющих выбор истинного. Для этого предлагается одновременно с основным сигналом ЗС излучать в направлении выбранных (смежных) спутников сдвинутые по времени копии этого сигнала согласованной по дистанции до CP мощности. Последняя должна быть ограниченной по сравнению с основным сигналом ЗС, так как они имитируют побочные излучения. С другой стороны, они должны превышать уровень собственно побочных излучений ЗС.
Информация о координатах ЗС (X,Y,Z)ЗС и i-го CP [X,Y,Z)i позволяет определить направление (азимут θi и угол места βi) с земной станции на i-й CP в локальной касательной системе координат (ENU - East north up), где ось X направлена на восток, ось Y на север, а ось Z - вверх. Полагают, что координаты ЗС в ней равны (0,0,0)ЗС, а i-го CP находят из выражения

где α - геоцентрическая или геодезическая долгота (они равны) ЗС, которую определяют как

а ϕ - геодезическая широта ЗС, которая отличается от геоцентрической широты ϕ'.
Геоцентрическая и геодезическая широты связаны следующим выражением

где М(ϕ) - радиус кривизны первого вертикала  , ƒ - сжатие земного эллипсоида
, ƒ - сжатие земного эллипсоида  е - эксцентриситет земного эллипсоида
е - эксцентриситет земного эллипсоида  а - большая полуось земного эллипсоида,
а - большая полуось земного эллипсоида,  - геодезическая высота. Для вычисления геодезических координат CP используют итеративный метод Боуринга. После нахождения координат i-го CP в локальной касательной системе координат определяют на него направление с земной станции
- геодезическая высота. Для вычисления геодезических координат CP используют итеративный метод Боуринга. После нахождения координат i-го CP в локальной касательной системе координат определяют на него направление с земной станции


Необходимую для излучения мощность сигнала, излучаемую в направлении соседних (выбранных) CP определяют из выражения

где  - коэффициент усиления передающей антенны; Pt - коэффициент усиления приемной антенны;
- коэффициент усиления передающей антенны; Pt - коэффициент усиления приемной антенны;  - мощность сигнала в передающей антенне (Вт) без учета потерь; Gt - мощность сигнала, принимаемая антенной (Вт) без учета потерь; R - расстояние между антеннами ЗС и CP в метрах; λ - длина волны сигнала в метрах. Зная , Pt, λ, R, заданное значение
- мощность сигнала в передающей антенне (Вт) без учета потерь; Gt - мощность сигнала, принимаемая антенной (Вт) без учета потерь; R - расстояние между антеннами ЗС и CP в метрах; λ - длина волны сигнала в метрах. Зная , Pt, λ, R, заданное значение  можно определить необходимую излучаемую мощность сигнала на каждый соседний i-тый CP
можно определить необходимую излучаемую мощность сигнала на каждый соседний i-тый CP

Для этого расстояние между ЗС и i-тым CP определяют с помощью известного выражения

В настоящее время широкое применение находят малогабаритные ЗС, например в ССС VSAT (Very Small Aperture Terminal) (см. Овчаренко К.Л., Еремеев И.Ю., Сазонов К.В. и др. Разностно-дальномерный метод определения местоположения земных станций спутниковых систем связи с применением ретранслятора на беспилотном летательном аппарате // Труды СПИИРАН. - 2018. - Т. 18, №1. - С. 176-201). Для них характерны сравнительно небольшие габариты антенны (до 1,8 м) и узкие диаграммы направленности (ДН), ширина основного лепестка которых не превышает нескольких градусов. Уровень боковых лепестков ДН существенно ограничен и определяется следующим выражением

Вариант ДН в горизонтальной (вертикальной) плоскостях для антенны ЗС VSAT приведен на фиг. 9.
В результате приема на МССГ совокупности излучений от основного и смежных CP их взаимнокорреляционная функция принимает вид, представленный на фиг. 3. По измеренным временным задержкам на основе корреляционной обработки строят линии положения (фиг. 4).
Использование случайной задержки между копиями основного сигнала в качестве формируемой радиопомехи приводит к получению случайных разностей хода между сигналами, принятыми с СР2 и СР3, а соответственно, к смещениям линий положения относительно истинных. В результате получают набор координат местоположения ЗС, который существенно снижает эффективность работы МССГ. Проведенный эксперимент подтвердил эффективность предлагаемого способа маскировки координат ЗС.
Исходя из вышесказанного можно выделить следующую очередность выполняемых операций. На подготовительном этапе:
1. Выделяют CP, соседние с используемым ЗС, которые могут быть использованы МССГ в процессе геолокации ЗС.
2. Определяют направление с ЗС на I выбранных CP (θ,β)i, θ=1°, 2°, …, 360°; β=1°, 2°, …, 180°; i=2, 3, …, I. Ориентируют дополнительные антенны в направлении соответствующих CP (выражения 6 и 7).
3. Вычисляют удаление выбранных CP от ЗС в соответствии с (10).
4. Задают уровень побочных излучений антенны ЗС в направлении соответствующих CP 
5. Определяют необходимую мощность помехового сигнала  в направлении каждого i-го CP в соответствии с (9),
в направлении каждого i-го CP в соответствии с (9), 
6. Определяют граничные значения задержки сигнала ЗС Δtmin и Δtmax при формировании маскирующих помех и величину временной дискреты δt.
В процессе работы:
1. Формируют ПСП, определяющую задержку сигнала ЗС для каждого i-го CP в заданных граничных пределах.
2. Формируют индивидуальный помеховый сигнал для каждого i-го CP на основе излучений ЗС, который задерживают по псевдослучайному закону с адаптированной под каждый CP мощностью.
Устройство активной радиомаскировки местоположения земной станции (см. фиг. 6 и 7) включает в свой состав последовательно соединенные разветвитель 2, блок буферных каскадов 3, предназначенный для задержки сигналов ЗС на заданную величину Δτi, I-канальный радиопередатчик 4, блок направленных антенн 5, каждая из антенн которого соединена с соответствующим выходом I-канального радиопередатчика 4, а группа управляющих входов блока направленных антенн 5 является первой входной шиной 1 устройства, предназначенной для ориентации I направленных антенн 5 на соответствующие спутники-ретрансляторы, генератор псевдослучайной последовательности 7, выходы которого соединены с соответствующими входами управления блока буферных каскадов 3, вход управления ГПСП 7 является третьей входной шиной 10 устройства, предназначенной для задания закона следования псевдослучайной последовательности, информационный вход разветвителя 2 объединен с I+1-м информационным входом I-канального радиопередатчика 4 и является второй входной шиной 6 устройства, по которой поступает значение рабочей полосы частот ΔF и собственно сигналы ЗС S(t), последовательно соединенные блок расчета дистанции связи Ri 9 и блок расчета мощности сигнала 8, выходы которого соединены с соответствующими управляющими входами I-канального радиопередатчика 4, I+1-й информационный вход которого объединен со вторым информационным входом блока расчета мощности сигнала 8, а группа входов блока расчета дистанции связи Ri 9 является четвертой входной шиной 11 устройства, предназначенной для задания координат ЗС (X,Y,Z)ЗС и соседних выбранных спутников-ретрансляторов (X,Y,Z)i. При этом блок буферных каскадов 3 содержит I-параллельных каскадов из последовательно соединенных дешифратора 12.i и управляемой линии задержки 13.i, информационные входы которых являются информационными входами блока буферных каскадов 3, входы управления которого соединены с информационными входами соответствующих дешифраторов 12.i.
Работа предлагаемого устройства осуществляется следующим образом. На подготовительном этапе определяют соседние с используемым ЗС спутники-ретрансляторы, которые могут быть использованы ССГ для определения местоположения защищаемой ЗС. После выбора I CP их координаты (X,Y,Z)i по четвертой входной шине 11 поступают на вход блока расчета дистанции связи Ri 9. Кроме того, шину 11 используют для задания координат собственно ЗС (X,Y,Z)ЗС. Определяют направление с ЗС на I выбранных спутников-ретрансляторов (θ,β)i в горизонтальной θ и вертикальной β областях.
В блоке буферных каскадов 3 на постоянный основе задаются граничные значения задержки сигналов ЗС Δtmin и Δtmax и величина временной дискреты δt в этом интервале. Выполненные эксперименты свидетельствуют о том, что целесообразном интервалом задержки сигналов ЗС является 10 нс … 1 мс с шагом 10 нс.
По третьей входной шине 10 задают закон псевдослучайной последовательности, формируемый блоком 7. Последний определяет (в блоке 3) величину задержки сигнала ЗС для каждого i-го выбранного CP в дискретные моменты времени δt⋅j, j=1, 2, …, J, δt⋅J интервал времени активной радиомаскировки. В блоке расчета мощности 8 на постоянной основе фиксируют средний уровень боковых излучений  и задают значение необходимой мощности сигнала в приемной антенне выбранных спутников-ретрансляторов
и задают значение необходимой мощности сигнала в приемной антенне выбранных спутников-ретрансляторов 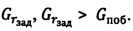 Для того, чтобы ССГ было принято решение об успешной геолокации ложной цели, необходимо превышение ложного пика ВКФ над истинным на случайное значение от 10 до 50%
Для того, чтобы ССГ было принято решение об успешной геолокации ложной цели, необходимо превышение ложного пика ВКФ над истинным на случайное значение от 10 до 50% 
Кроме того, по второй входной шине 6 устройства с выхода ЗС поступает информация о ее рабочей полосе частот в L диапазоне волн 950-2150 МГц. Последняя может составлять от 5 кГц до 10 МГц. Эта информация используется в блоке 4 для настройки I каналов передатчиков. В блоке 8 она необходима для расчета необходимой мощности помеховых сигналов для выбранных СР.
В процессе работы устройства активной радиомаскировки сигналы ЗС S(t) поступают на вторую входную шину 6 устройства. На фиг. 8 приведена упрощенная структурная схема ЗС. Она содержит последовательно соединенные спутниковые модемы 17, сумматор 14, преобразователь частоты «вверх» 15, усилитель мощности 16, основную антенную систему 18, малошумящий усилитель 21, преобразователь частоты «вниз» 20, делитель 19, выходы которого соединены со вторыми информационными входами спутниковых модемов 17, первая группа информационных входов является шиной управления ЗС (см. В. Бобков. Земные станции спутниковой связи // CONNECT, №2, 2007, с. 148-151). Конструктивно элементы станции могут быть объединены. Сигнал ЗС на заявляемое устройство (на шину 6) поступает с трансивера станции, объединяющего, как правило, преобразователь частоты «вверх» и «вниз» и малошумящий усилитель. В блоке 2 осуществляют их дополнительное усиление и разветвление (деление) на I идентичных канала. Сигнал ЗС с I выходов блока 2 одновременно поступает на I информационных входа блока буферных каскадов 3. На I управляющих входов блока 3 подаются отличающиеся между собой значения псевдослучайной последовательности с соответствующих выходов ГПСП 7. Последний может представлять из себя набор из I формирователей m-последовательностей заданной длины или один формирователь. В этом случае значения ПСП поступают на I выходы блока 7 с некоторыми взаимными сдвигами по времени nδt, n=1, 2, …, n, …, N.
В блоке буферных каскадов 3 текущие значения ПСП, поступившие на I управляющих входов из блока 7, преобразуют в соответствующие им значения задержек сигнала ЗС. В результате на I выходах блока 3 присутствуют сигналы ЗС, задержанные на различные интервалы времени. Последние поступают на соответствующие информационные входы I-канального радиопередатчика 4.
Одновременно с выполнением названных операций в блоке расчета дистанции связи Ri 9 на основе исходных данных о местоположении ЗС (X,Y,Z)ЗС и CP (X,Y,Z)i в соответствии с (10) определяют их взаимные расстояния Ri. Найденные значения Ri поступают на информационные входы блока расчета мощности сигнала 8. В блоке 8 в соответствии с (9) определяют необходимую для излучения мощность задержанного в блоке 3 сигнала ЗС для каждого i-го выделенного СР. Необходимая информация о частоте сигнала ЗС в блок 8 поступает на второй информационный вход с выхода I-канального радиопередатчика 4. Полученные в блоке 8 значения для каждого i-го канала преобразуют в соответствующие коэффициенты усиления, которые поступают на управляющие входы блока 4.
Далее усиленные в блоке 4 сигналы ЗС поступают на входы направленных антенн блока 5 и излучаются в направлении выбранных СР. При этом направления излучения сигналов ЗС и их мощность оптимизированы с пространственным положением группировки СР.
Реализация устройства известна и трудностей не вызывает. Разветвитель 2 представляет собой последовательно подключенные усилитель мощности и собственно высокочастотный разветвитель на I. В его функцию входит сформировать на своих I выходах I идентичных копий сигнала ЗС с амплитудой, пригодной для нормальной работы блока 3. В качестве последнего может быть использовано изделие фирмы PROconect 3-WAY SPLITER и усилитель AD8351 ARM2 фирмы Analog Devices Inc.
Блок буферных каскадов 3 содержит I параллельных каскадов из последовательно соединенных дешифратора 12.i и управляемой линии задержки 13.i. В функции блока 3 входит задержка сигналов ЗС на различные временные интервалы, значения которых задаются блоком 7. Реализация дешифраторов и управляемых линий задержки аналоговых сигналов широко освещена в литературе. Последняя может быть выполнена на базе шестибитной управляемой линии задержки NC12111c-106.
I-канальный радиопередатчик 4 обеспечивает окончательное формирование помеховых сигналов выбранным CP, оптимизированных по задержке и амплитуде, преобразования рабочей частоты ЗС «вверх» (например, в С или Ku диапазоны волн) с последующим усилением. Для этой цели могут быть использованы серийно выпускаемые изделия SSPBM-KX16-DSE-HU1, SSPBMg-CX20-DSE-HU1 и др.
Реализация блоков 8 и 9 известна и трудностей не вызывает. В их функции входят расчетные операции в соответствии с выражениями 9 и 10 (см. Шевкопляс Б.В. Микропроцессорные структуры. Инженерные решения: Справочник. - 2-е изд. перераб. и доп. - М.: Радиосвязь, 1990. - 512 с.).
Реализация генератора псевдослучайной последовательности 7 известна (см. там же стр. 492-497).
Таким образом, предлагаемые способ и устройство активной радиомаскировки местоположения земной станции ССС не предполагают внесение изменений в алгоритм ее работы, а реализуется в виде дополнительного оборудования.
Реализация предлагаемого устройства существенно упрощается при обработке сигналов ЗС в цифровом виде. В этом случае функции блоков 2, 3 и 7-9 и частично 4 выполняют по схеме, приведенной на фиг. 10. Здесь использовано два приемопередатчика AD9361 2x2 со встроенными 12-разрядными ЦАП-АЦП, ПЛИС Xil-inx Kintex 7 (XC7K325T-2FFG900C) и цифровой сигнальный процессор TMS320TC166 14 (2GB DDR3 RAM, 1 Mb NOR Flash). После цифро-аналогового преобразования в AD9361 сигналы ЗС поступают на блок SSPBM-KX16-DSE-H01 или SSPMg-CX20-DSE-H01 в зависимости от используемого диапазона волн и далее на направленные антенны блока 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2837386C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2020 |
|
RU2749456C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2020 |
|
RU2755058C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2834416C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НЕСАНКЦИОНИРОВАННЫХ ВОЗДЕЙСТВИЙ НА СЕТЬ СПУТНИКОВОЙ СВЯЗИ | 2015 |
|
RU2579934C1 |
| Способ и система блокирования несанкционированного канала передачи информации от радиопередатчика земного базирования на космический аппарат | 2017 |
|
RU2666785C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОГО ТЕРМИНАЛА С ПОМОЩЬЮ СПУТНИКА-РЕТРАНСЛЯТОРА НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 2017 |
|
RU2679890C1 |
| Способ определения местоположения земной станции спутниковой связи | 2017 |
|
RU2640395C1 |
| СИСТЕМА ВЫСОКОСКОРОСТНОЙ СВЯЗИ С КОСМИЧЕСКИМИ АППАРАТАМИ С ПРИМЕНЕНИЕМ ТЕХНОЛОГИЙ АВТОМАТИЧЕСКОГО ВЗАИМНОГО НАВЕДЕНИЯ ОСТРОНАПРАВЛЕННЫХ АНТЕНН | 2023 |
|
RU2816351C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОГО ТЕРМИНАЛА С ПОМОЩЬЮ НЕ МЕНЕЕ ДВУХ СПУТНИКОВ-РЕТРАНСЛЯТОРОВ НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 2017 |
|
RU2684740C1 |
Изобретения относятся к радиотехнике и могут быть использованы для защиты от средств воздушного и космического радиомониторинга. Достигаемый технический результат - обеспечение затруднения определения местоположения (ОМП) земной станции (ЗС). Указанный результат достигается тем, что выделяют I соседних с используемым спутников-ретрансляторов (CP), имеющих сходные характеристики, определяют координаты ЗС и I выбранных CP, направление на эти CP, вычисляют расстояние между ЗС и CP, значение необходимой для излучения мощности помехового сигнала в направлении каждого CP, ориентируют I дополнительных антенн в направлении соответствующих CP, а в качестве активной маскирующей помехи используют отличные между собой задержанные по псевдослучайному закону и оптимизированные по мощности сигналы ЗС. Устройство активной радиомаскировки местоположения ЗС содержит разветвитель, блок буферных каскадов, I-канальный радиопередатчик, блок направленных антенн, генератор псевдослучайной последовательности, блок расчета мощности сигнала, блок расчета дистанции связи и четыре входных шины с соответствующими связями. 2 н. и 1 з.п. ф-лы, 10 ил.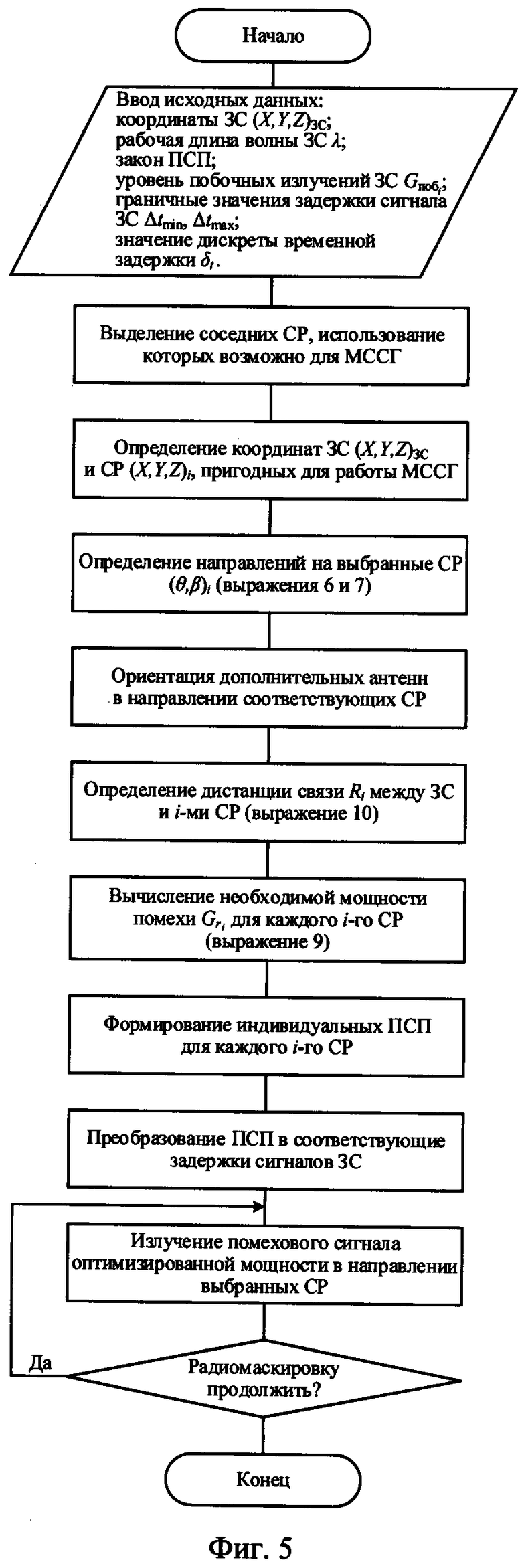
1. Способ активной радиомаскировки сигналов земной станции (ЗС) спутниковой системы связи (ССС), заключающийся в том, что маскировку осуществляют путем излучения, ретрансляции шумовых помех или имитирующих и ложных сигналов, сопряженных и синхронизированных с сигналами ЗС, отличающийся тем, что на подготовительном этапе выделяют I соседних с используемым спутников-ретрансляторов (CP), i=2, 3, …I, имеющих одинаковые частоты восходящих линий связи, поляризацию антенной системы и зону покрытия, определяют координаты ЗС (X,Y,Z)ЗС и выбранных CP (X,Y,Z)i, направление (θ,β)i на выбранные CP, рассчитывают расстояние между ЗС и спутниками-ретрансляторами, определяют значения  необходимой для излучения мощности помехового сигнала в направлении каждого из выбранных i-х спутников-ретрансляторов, i=2, 3, …I, а ЗС ССС дополнительно оборудуют I направленными антеннами, которые ориентируют в направлении соответствующих спутников-ретрансляторов, и I-канальным когерентным радиопередатчиком, а в качестве активной маскирующей помехи в I дополнительных каналах радиопередатчик - направленная антенна используют отличные между собой задержанные по псевдослучайному закону и оптимизированные по мощности
необходимой для излучения мощности помехового сигнала в направлении каждого из выбранных i-х спутников-ретрансляторов, i=2, 3, …I, а ЗС ССС дополнительно оборудуют I направленными антеннами, которые ориентируют в направлении соответствующих спутников-ретрансляторов, и I-канальным когерентным радиопередатчиком, а в качестве активной маскирующей помехи в I дополнительных каналах радиопередатчик - направленная антенна используют отличные между собой задержанные по псевдослучайному закону и оптимизированные по мощности  сигналы ЗС.
сигналы ЗС.
2. Устройство активной радиомаскировки сигналов земной станции (ЗС), содержащее последовательно соединенными разветвитель, блок буферных каскадов, I-канальный радиопередатчик, i=2, 3, …I, и блок из I антенн, отличающееся тем, что в блоке антенн используют направленные антенны, каждая из которых соединена с соответствующим выходом I-канального радиопередатчика, а группа управляющих входов блока направленных антенн является первой входной шиной устройства, предназначена для ориентации I направленных антенн на соответствующие спутники-ретрансляторы, генератор псевдослучайной последовательности (ГСПС), выходы которого соединены с соответствующими входами управления блока буферных каскадов, предназначенного для задержки сигналов ЗС на заданную ГПСП каждому каскаду Δτi величину, вход управления ГПСП является третьей входной шиной устройства, предназначена для задания закона следования псевдослучайной последовательности, информационный вход разветвителя объединен с I+1-м информационным входом I-канального радиопередатчика и является второй входной шиной устройства, по которой поступает значение рабочей полосы частот ΔF и собственно сигналы ЗС S(t), последовательно соединенные блок расчета дистанции связи Ri и блок расчета мощности сигнала  группа выходов которого соединена с соответствующими управляющими входами I-канального радиопередатчика, I+1-й информационный вход которого объединен со вторым информационным входом блока расчета мощности сигнала
группа выходов которого соединена с соответствующими управляющими входами I-канального радиопередатчика, I+1-й информационный вход которого объединен со вторым информационным входом блока расчета мощности сигнала  а группа входов блока расчета дистанции связи Ri является четвертой входной шиной устройства, предназначена для задания координаты ЗС (X,Y,Z)ЗС и соседних выбранных спутников-ретрансляторов (X,Y,Z)i.
а группа входов блока расчета дистанции связи Ri является четвертой входной шиной устройства, предназначена для задания координаты ЗС (X,Y,Z)ЗС и соседних выбранных спутников-ретрансляторов (X,Y,Z)i.
3. Устройство по п. 2, отличающееся тем, что блок буферных каскадов выполняют содержащим I параллельных каскадов из последовательно соединенных дешифратора и управляемой линии задержки, информационные входы которых являются информационными входами блока буферных каскадов, входы управления которого соединены с информационными входами соответствующих дешифраторов.
| УСТРОЙСТВО РАДИОМАСКИРОВКИ | 2002 |
|
RU2224376C1 |
| СПОСОБ РАДИОМАСКИРОВКИ СТАЦИОНАРНЫХ ОБЪЕКТОВ | 2012 |
|
RU2513985C1 |
| Передвижное устройство для валки леса | 1948 |
|
SU83164A1 |
| СПОСОБ РАДИОЭЛЕКТРОННОГО ПОДАВЛЕНИЯ АППАРАТУРЫ ПОТРЕБИТЕЛЕЙ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ В ПРЕДЕЛАХ ЗАЩИЩАЕМОЙ ТЕРРИТОРИИ | 2014 |
|
RU2581602C1 |
| СПОСОБ СОЗДАНИЯ РЕТРАНСЛИРОВАННЫХ ПОМЕХ | 2012 |
|
RU2523430C2 |
| WO 2007084148 A2, 26.07.2007 | |||
| US 5390207 A, 14.02.1995 | |||
| JP 2004279268 A, 07.10.2004. | |||

