ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области операционной технологии, а более конкретно, к способу и устройству для черчения планировки комнаты.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В связи с быстрым развитием науки и техники, все больше и больше интеллектуальных бытовых приборов используются в огромном количестве домашних хозяйств, что в значительной степени повышает комфорт и создает удобство для людей. Например, для того, чтобы облегчить подметание комнаты, все больше людей предпочитают использовать робот-подметатель для подметания комнаты.
В известном уровне техники для того, чтобы избежать наталкиваний на мебель, расположенную в комнате, робот-подметатель может сканировать область, которую необходимо убрать, инфракрасным излучением или ультразвуком для выявления мебели, которая появляется на пути подметания. При подметании комнаты, робот-подметатель может автоматически поворачиваться при наталкивании на мебель, избегая, таким образом, столкновения с мебелью в процессе подметания.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Для того, чтобы решить проблемы, существующие в известном уровне техники, варианты осуществления настоящего изобретения предлагает способ и устройство для черчения планировки комнаты. Технические решения заключаются в следующем.
В соответствии с первым аспектом вариантов осуществления настоящего изобретения, предлагается способ черчения планировки комнаты, включающий: получение графа пути подметания робота-подметателя, причем граф пути подметания включает положения N первых препятствий и контуров, и положения M вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, причем нижняя область каждого из N первых препятствий – меньше или равна первому заданному пороговому значению, а нижняя область каждого из M вторых препятствий – больше или равна второму заданному пороговому значению, где N и M представляют собой целые числа, которые – больше или равны 0; определение Q предметов мебели, расположенных в комнате, в соответствии с положениями N первых препятствий и контуров, и положениями M вторых препятствий, где Q представляет собой целое число, которое – больше или равно 0, и меньше или равно (N+M); и обозначение Q предметов мебели на плане комнаты для создания планировки комнаты.
Технические решения, предложенные в вариантах осуществления настоящего изобретения, могут иметь следующие преимущества. В соответствии с графом пути подметания робота-подметателя и препятствиями, обозначенными на графе пути подметания, можно определить мебель, расположенную в комнате, что создает еще больше удобств и повышает точность черчения планировки комнаты, и приводит к дальнейшему улучшению пользовательского интерфейса.
В одном варианте осуществления настоящего изобретения, первое заданное пороговое значение – меньше второго заданного порогового значения.
Технические решения, предложенные в вариантах осуществления настоящего изобретения, могут иметь следующие преимущества. Определяя нижнюю область, можно определить препятствия различных категорий, что повышает точность определения мебели, расположенной в комнате, в соответствии с препятствиями, и приводит к дальнейшему улучшению пользовательского интерфейса.
В одном варианте осуществления настоящего изобретения, определение Q предметов мебели, расположенных в комнате, в соответствии с положениями N первых препятствий и контуров, и положениями M вторых препятствий, включает: получение расстояния между каждым из N первых препятствий в пределах заданного расстояния, в соответствии с положениями N первых препятствий; получение размеров S замкнутых геометрий, сформированных N первыми препятствиями, в соответствии с расстояниями между каждым из N первых препятствий в пределах заданного расстояния; определение размеров M объектов, представленных M вторыми препятствиями, в соответствии с контурами и положениями M вторых препятствий, и размером комнаты; и определение Q предметов мебели, расположенных в комнате, в соответствии с размерами S замкнутых геометрий, размерами M объектов и базой данных заданного размера мебели.
Технические решения, предложенные в вариантах осуществления настоящего изобретения, могут иметь следующие преимущества. В соответствии с положениями и/или контурами различных препятствий, можно определить размеры различных объектов, и затем можно получить подходящую мебель, сопоставимую с размерами объектов, повышая точность определения мебели.
В одном варианте осуществления настоящего изобретения, определение Q предметов мебели, расположенных в комнате, в соответствии с размерами S замкнутых геометрий, размерами M объектов и базой данных заданного размера мебели, включает: определение и отображение множества вариантов соответствующей мебели из Q предметов мебели, расположенных в комнате, в соответствии с размерами S замкнутых геометрий, размерами M объектов и базой данных заданного размера мебели; получение команды выбора операции, причем команда выбора операций включает конкретный вариант каждого предмета мебели, определенный из множества вариантов каждого предмета мебели; и определение Q предметов мебели, расположенных в комнате, в соответствии с конкретным вариантом каждого предмета мебели.
Технические решения, предложенные в вариантах осуществления настоящего изобретения, могут иметь следующие преимущества. При наличии множества вариантов мебели, определенных в соответствии с размером объекта, на экране может быть отображено множество вариантов для облегчения пользователю выбора конкретного варианта мебели, соответствующего объекту, из множества вариантов, что повышает вариативность и точность черчения планировки, и улучшает пользовательский интерфейс.
В одном варианте осуществления настоящего изобретения, способ дополнительно включает: получение изображения панорамной сцены комнаты; и черчение Q предметов мебели, расположенных в комнате, на изображении панорамной сцены для получения панорамной планировки комнаты.
Технические решения, предложенные в вариантах осуществления настоящего изобретения, могут иметь следующие преимущества. Определенные Q предметы мебели могут быть начерчены на изображении панорамной сцены комнаты для отображения, улучшая, таким образом, восприятие планировки и улучшая пользовательский интерфейс.
В соответствии со вторым аспектом вариантов осуществления настоящего изобретения, предлагается способ черчения планировки комнаты, включающий: обозначение положений N первых препятствий и контуров, и положений M вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, на графе пути подметания, причем нижняя область каждого из N первых препятствий – меньше или равна первому заданному пороговому значению, а нижняя область каждого из M вторых препятствий – больше или равна второму заданному пороговому значения, где N и M представляют собой целые числа, которые – больше или равны 0; и передачу графа пути подметания, обозначенного положениями N первых препятствий и контуров, и положениями M вторых препятствий, на терминал.
Технические решения, предложенные в вариантах осуществления настоящего изобретения, могут иметь следующие преимущества. Робот-подметатель может обозначить препятствия, на которые он наталкивается при подметании комнаты, на графе пути подметания, и передать граф пути подметания на терминал для того, чтобы терминал мог начертить планировку комнаты, создавая, таким образом, еще больше удобств и повышая точность черчения планировки комнаты, и улучшая пользовательский интерфейс.
В одном варианте осуществления настоящего изобретения, первое заданное пороговое значение – меньше второго заданного порогового значения.
Технические решения, предложенные в вариантах осуществления настоящего изобретения, могут иметь следующие преимущества. Определяя нижнюю область, робот-подметатель может определить препятствия различных категорий, повышая точность терминала, определяющего мебель, расположенную в комнате, в соответствии с препятствиями, и улучшая пользовательский интерфейс.
В одном варианте осуществления настоящего изобретения, обозначение положений N первых препятствий и контуров, и положений M вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, на графе пути подметания, включает: получение нижней области контрольного препятствия, когда количество наталкиваний на контрольное препятствие при подметании комнаты – больше или равно заданному количеству наталкиваний; когда нижняя область контрольного препятствия – меньше или равна первому заданному пороговому значению, обозначение контрольного препятствия в качестве первого препятствия на графе пути подметания, в соответствии с положением контрольного препятствия; и когда нижняя область контрольного препятствия – больше или равна второму заданному пороговому значению, обозначение контрольного препятствия в качестве второго препятствия на графе пути подметания, в соответствии с контуром контрольного препятствия и положением контрольного препятствия.
Технические решения, предложенные в вариантах осуществления настоящего изобретения, могут иметь следующие преимущества. Когда происходит частое наталкивание на одно и то же препятствие в процессе подметания, то это препятствие может быть обозначено как первое препятствие или второе препятствие, что при черчении планировки позволяет избежать ошибки, вызванной неправильным обозначением движущегося объекта, и повышает точность черчения планировки.
В соответствии с третьим аспектом вариантов осуществления настоящего изобретения, предлагается устройство для черчения планировки комнаты, включающее первый модуль получения, модуль определения и модуль создания.
Первый модуль получения выполнен с возможностью получения графа пути подметания робота-подметателя, причем граф пути подметания включает положения N первых препятствий и контуров, и положения M вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, причем нижняя область каждого из N первых препятствий – меньше или равна первому заданному пороговому значению, а нижняя область каждого из M вторых препятствий – больше или равна второму заданному пороговому значению, где N и M представляют собой целые числа, которые – больше или равны 0.
Модуль определения выполнен с возможностью определения Q предметов мебели, расположенных в комнате, в соответствии с положениями N первых препятствий и контуров, и положениями M вторых препятствий, где Q представляет собой целое число, которое – больше или равно 0, и меньше или равно (N+M).
Модуль создания выполнен с возможностью обозначения Q предметов мебели на плане комнаты для создания планировки комнаты.
В одном варианте осуществления настоящего изобретения, первое заданное пороговое значение – меньше второго заданного порогового значения.
В одном варианте осуществления настоящего изобретения, модуль определения включает первый субмодуль получения, второй субмодуль получения, первый субмодуль определения и второй субмодуль определения.
Первый субмодуль получения выполнен с возможностью получения расстояния между каждым из N первых препятствий в пределах заданного расстояния, в соответствии с положениями N первых препятствий.
Второй субмодуль получения выполнен с возможностью получения размеров S замкнутых геометрий, сформированных N первыми препятствиями, в соответствии с расстояниями между каждым из N первых препятствий в пределах заданного расстояния.
Первый субмодуль определения выполнен с возможностью определения размеров M объектов, представленных M вторыми препятствиями, в соответствии с контурами и положениями M вторых препятствий, и размерами комнаты.
Второй субмодуль определения выполнен с возможностью определения Q предметов мебели, расположенных в комнате, в соответствии с размерами S замкнутых геометрий, размерами M объектов и базой данных заданного размера мебели.
В одном варианте осуществления настоящего изобретения, второй субмодуль определения включает блок определения и отображения, блок получения и блок определения.
Блок определения и отображения выполнен с возможностью определения и отображения множества вариантов для каждого предмета мебели, расположенного в комнате, в соответствии с размерами S замкнутых геометрий, размерами M объектов и базой данных заданного размера мебели.
Блок получения выполнен с возможностью получения команды выбора операции, причем команда выбора операции включает конкретный вариант каждого предмета мебели, определенный из множества вариантов предмета мебели.
Блок определения выполнен с возможностью определения Q предметов мебели, расположенных в комнате, в соответствии с конкретным вариантом каждого предмета мебели.
В одном варианте осуществления настоящего изобретения, устройство дополнительно включает второй модуль получения и третий модуль получения.
Второй модуль получения выполнен с возможностью получения изображения панорамной сцены комнаты.
Третий модуль получения выполнен с возможностью черчения Q предметов мебели, расположенных в комнате, на изображении панорамной сцены для получения панорамной планировки комнаты.
В соответствии с четвертым аспектом вариантов осуществления настоящего изобретения, предлагается устройство для черчения планировки комнаты, включающее модуль обозначения и модуль передачи.
Модуль обозначения выполнен с возможностью обозначения положений N первых препятствий и контуров, и положений M вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, на графе пути подметания, причем нижняя область каждого из N первых препятствий – меньше или равна первому заданному пороговому значению, а нижняя область каждого из M вторых препятствий – больше или равна второму заданному пороговому значению, где N и M представляют собой целые числа, которые – больше или равны 0.
Модуль передачи выполнен с возможностью передачи графа пути подметания, обозначенного положениями N первых препятствий и контуров, и положениями M вторых препятствий, на терминал.
В одном варианте осуществления настоящего изобретения, первое заданное пороговое значение – меньше второго заданного порогового значения.
В одном варианте осуществления настоящего изобретения, модуль обозначения включает третий субмодуль получения, первый субмодуль обозначения и второй субмодуль обозначения.
Третий субмодуль получения выполнен с возможностью получения нижней области контрольного препятствия, когда количество наталкиваний на контрольное препятствие при подметании комнаты – больше или равно заданному количеству наталкиваний.
Первый субмодуль обозначения выполнен с возможностью обозначения контрольного препятствия в качестве первого препятствия на графе пути подметания, в соответствии с положением контрольного препятствия, когда нижняя область контрольного препятствия – меньше или равна первому заданному пороговому значению.
Второй субмодуль обозначения выполнен с возможностью обозначения контрольного препятствия в качестве второго препятствия на графе пути подметания, в соответствии с контуром контрольного препятствия и положением контрольного препятствия, когда нижняя область контрольного препятствия – больше или равна второму заданному пороговому значению.
В соответствии с пятым аспектом вариантов осуществления настоящего изобретения, предлагается устройство для черчения планировки комнаты, включающее первый процессор и первую память.
Первая память выполнена с возможностью хранения команд, выполняемых первым процессором.
Первый процессор выполнен с возможностью: получения графа пути подметания робота-подметателя, причем граф пути подметания включает положения N первых препятствий и контуров, и положения M вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, причем нижняя область первого препятствия – меньше или равна первому заданному пороговому значению, а нижняя область второго препятствия – больше или равна второму заданному пороговому значению, где N и M представляют собой целые числа, которые – больше или равны 0; определения Q предметов мебели, расположенных в комнате, в соответствии с положениями N первых препятствий и контуров, и положениями M вторых препятствий, где Q представляет собой целое число, которое больше или равно 0, и меньше или равно (N+M); и обозначения Q предметов мебели на плане комнаты для создания планировки комнаты.
В соответствии с шестым аспектом вариантов осуществления настоящего изобретения, предлагается устройство для черчения планировки комнаты, включающее второй процессор и вторую память.
Вторая память выполнена с возможностью хранения команд, выполняемых вторым процессором.
Второй процессор выполнен с возможностью: обозначения положений N первых препятствий и контуров, и положений M вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, на графе пути подметания, причем нижняя область первого препятствия – меньше или равна первому заданному пороговому значению, а нижняя область второго препятствия – больше или равна второму заданному пороговому значения, где N и M представляют собой целые числа, которые – больше или равны 0; и передачи графа пути подметания, обозначенного положениями N первых препятствий и контуров, и положениями M вторых препятствий, на терминал.
Следует понимать, что и приведенное выше общее описание, и последующее подробное описание являются только примерными и пояснительными, и они не ограничивают настоящее изобретение, в том виде, в котором оно заявлено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопроводительные чертежи, которые включены и составляют часть настоящего описания, показывают примерные варианты осуществления по настоящему изобретению, и, вместе с описанием, предназначены для объяснения принципов настоящего изобретения.
Фигура 1a представляет собой блок-схему, показывающую способ черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения.
Фигура 1b представляет собой блок-схему, показывающую способ черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения.
Фигура 1c представляет собой диаграмму планировки комнаты, изображенную с вариантами мебели, в соответствии с примерным вариантом осуществления настоящего изобретения.
Фигура 1d представляет собой диаграмму планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения.
Фигура 1e представляет собой блок-схему, показывающую способ черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения.
Фигура 2 представляет собой блок-схему, показывающую способ черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения.
Фигура 3 представляет собой диаграмму взаимодействия, показывающую способ черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения.
Фигура 4 представляет собой диаграмму взаимодействия, показывающую способ черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения.
Фигура 5a представляет собой блок-диаграмму, показывающую устройство для черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения.
Фигура 5b представляет собой блок-диаграмму, показывающую устройство для черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения.
Фигура 5c представляет собой блок-диаграмму, показывающую устройство для черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения.
Фигура 5d представляет собой блок-диаграмму, показывающую устройство для черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения.
Фигура 6a представляет собой блок-диаграмму, показывающую устройство для черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения.
Фигура 6b представляет собой блок-диаграмму, показывающую устройство для черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения.
Фигура 7 представляет собой схему, показывающую устройство для черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения.
Фигура 8 представляет собой схему, показывающую устройство для черчения планировки комнаты, в соответствии с другим примерным вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Теперь будет приведена подробная ссылка на примерные варианты осуществления настоящего изобретения, примеры которого показаны на сопроводительных чертежах. Нижеследующее описание относится к сопроводительным чертежам, при этом одни и те же номера на различных чертежах представляют одни и те же или подобные элементы, если не указано иное. Варианты осуществления настоящего изобретения, изложенные в нижеследующем описании примерных вариантов, не представляют все варианты осуществления настоящего изобретения. Напротив, они представляют собой лишь примеры устройств и способов, в соответствии с аспектами, относящимися к настоящему изобретению, как указано в прилагаемой формуле изобретения.
Технические решения, предложенные в вариантах осуществления настоящего изобретения, относятся к терминалу и роботу-подметателю, при этом, терминал может представлять собой мобильный телефон, планшетный компьютер, интеллектуальные часы и другие устройства, которые могут быть подсоединены к роботу-подметателю. Терминал и робот-подметатель могут быть подсоединены друг к другу посредством инфракрасного излучения, Bluetooth или беспроводной сети, и варианты осуществления настоящего изобретения не ограничиваются этим. В известном уровне техники, при черчении планировки комнаты, размер каждого предмета мебели, расположенного в комнате, может быть измерен последовательно, и затем изображение каждого предмета мебели чертят по первоначальному плану комнаты, в соответствии с положением каждого предмета мебели. Таким образом, процесс черчения планировки – утомительный, и пользовательский интерфейс оставляет желать лучшего. В вариантах осуществления настоящего изобретения, терминал может определять мебель, расположенную в убранной комнате, в соответствии с графом пути подметания робота-подметателя и препятствиями, обозначенными на графе пути подметания, создавая еще больше удобств и повышая точность черчения планировки комнаты, и улучшая пользовательский интерфейс.
Варианты осуществления настоящего изобретения предлагают способ черчения планировки комнаты, исполнительные устройства которого включают: терминал и робот-подметатель. Варианты осуществления настоящего изобретения предлагают два способа реализации междоменного доступа, в соответствии с различными исполнительными устройствами, и эти способы описаны следующим образом.
Сторона терминала
Фигура 1a представляет собой блок-схему, показывающую способ черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения. Как показано на Фигуре 1, этот способ черчения планировки комнаты применяется в терминале, и он включает блоки 101-103.
В блоке 101 получают граф пути подметания робота-подметателя, при этом, граф пути подметания включает положения N первых препятствий и контуров, и положения M вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты.
Нижняя область первого препятствия – меньше или равна первому заданному пороговому значению, а нижняя область второго препятствия – больше или равна второму заданному пороговому значению, где N и M представляют собой целые числа, которые – больше или равны 0.
В одном примерном варианте осуществления настоящего изобретения, нижняя область первого препятствия может представлять собой контактную область первого препятствия с землей, а нижняя область второго препятствия может представлять собой контактную область второго препятствия с землей. Робот-подметатель может определить препятствие, на которое он может натолкнуться, посредством функции, позволяющей избегать препятствий, встречающиеся на пути, в процессе подметания комнаты, и затем отсканировать препятствие посредством датчика, установленного на нем, для определения пропорции относительного размера препятствия по отношению к роботу-подметателю и затем получить контактную область препятствия с землей, то есть нижнюю область препятствия, в соответствии с размером робота-подметателя. Когда нижняя область препятствия – меньше или равна первому заданному пороговому значению, то препятствие идентифицируется как первое препятствие. Когда нижняя область препятствия – больше или равна второму заданному пороговому значению, то препятствие идентифицируется как второе препятствие.
В одном примерном варианте осуществления настоящего изобретения, терминал может быть подсоединен к роботу-подметателю посредством инфракрасного излучения, Bluetooth или беспроводной сети, и он может получить граф пути подметания, переданный роботом-подметателем. В альтернативном варианте осуществления настоящего изобретения, робот-подметатель может выгрузить граф пути подметания в облачный сервер после получения графа пути подметания, и терминал может загрузить граф пути подметания с облачного сервера при черчении планировки. В альтернативном варианте осуществления настоящего изобретения, робот-подметатель может передать граф пути подметания на другой терминал после получения графа пути подметания, и затем этот терминал направляет граф пути подметания на терминал, который чертит планировку.
В практическом применении, первое заданное пороговое значение и второе заданное пороговое значение могут быть заданы в соответствии с конкретными ситуациями, которые не ограничиваются вариантами осуществления настоящего изобретения. В альтернативном варианте осуществления настоящего изобретения, первое заданное пороговое значение – меньше второго заданного порогового значения.
В блоке 102, Q предметы мебели, расположенные в комнате, определяются в соответствии с положениями N первых препятствий и контуров, и положениями M вторых препятствий.
Q представляет собой целое число, которое больше или равно 0, и меньше или равно (N+M).
В одном примерном варианте осуществления настоящего изобретения, терминал может анализировать граф пути подметания после получения графа пути подметания, и он может получить положения N первых препятствий и контуров, и положения M вторых препятствий, включенных в граф пути подметания. Поскольку нижняя область первого препятствия – небольшая, то первое препятствие может рассматриваться как опорная часть мебели, такая как, ножка стола, ножка стула и ножка дивана. В соответствии с положениями N первых препятствий, можно получить расстояние между каждыми двумя первыми препятствиями, и затем можно получить S предметы мебели, представленные N первыми препятствиями. Нижняя область второго препятствия – большая, и, таким образом, второе препятствие можно рассматривать как предмет напольной мебели, такой как, напольная кровать, напольный стол и напольный стул. В соответствии с контурами и положениями M вторых препятствий, можно получить M предметы мебели, представленные M вторыми препятствиями. Сумма S и M равна Q.
В блоке 103, Q предметы мебели обозначены на плане комнаты для создания планировки комнаты.
В одном примерном варианте осуществления настоящего изобретения, во время инициализации, терминал может получить план комнаты с облачного сервера или от робота-подметателя, при этом, план показывает только стены, двери, окна и полы комнаты. Когда терминал определяет Q предметы мебели, расположенные в комнате, то терминал может обозначить N первые препятствия и Q предметы мебели, представленные M вторыми препятствиями, на плане комнаты, в соответствии с положениями N первых препятствий и контуров, и положениями M вторых препятствий, создавая, таким образом, планировку комнаты.
В технических решениях вариантов осуществления настоящего изобретения, терминал может определить мебель, расположенную в убранной комнате, в соответствии с графом пути подметания робота-подметателя и препятствиями, обозначенными на графе пути подметания, создавая еще больше удобств и повышая точность черчения планировки комнаты, и улучшая пользовательский интерфейс.
В одном варианте осуществления настоящего изобретения, как показано на Фигуре 1b, в блоке 102, определение Q предметов мебели, расположенных в комнате, в соответствии с положениями N первых препятствий и контуров, и положениями M вторых препятствий, может быть реализовано блоками 1021-1024.
В блоке 1021, расстояние между каждым первым препятствием и каждым другим первым препятствием в пределах заданного расстояния получают в соответствии с положениями N первых препятствий.
В блоке 1022, размеры S замкнутых геометрий, сформированных N первыми препятствиями, получают в соответствии с расстоянием между каждым первым препятствием и каждым другим первым препятствием в пределах заданного расстояния.
В блоке 1023, размеры M объектов, представленных M вторыми препятствиями, получают в соответствии с контурами и положениями M вторых препятствий, и размером комнаты.
В блоке 1024, Q предметы мебели, расположенные в комнате, определяются в соответствии с размерами S замкнутых геометрий, размерами M объектов и базой данных заданного размера мебели.
В одном примерном варианте осуществления настоящего изобретения, во время инициализации, в терминале может быть предусмотрено заданное расстояние и база данных заданного размера мебели. Заданное расстояние представляет собой максимальное расстояние между соответствующими опорными частями наибольшего количества мебели, и база данных заданного размера мебели описывает различные размеры стандартной мебели. Например, размер стандартной кровати включает 1,2 м*2 м, 1,5 м*2 м или 1,8 м*2 м, размер стандартного стола включает 1*1,8 м или 0,8 м*1,35 м, и размер стандартного стула включает 0,3 м*0,4 м или 0,5 м*0,5 м.
После получения положений N первых препятствий, терминал может получить расстояния между каждым из N первых препятствий и другими первыми препятствиями в пределах заданного расстояния, и затем получить размеры S замкнутых геометрий, сформированных N первыми препятствиями, в соответствии с расстояниями между каждым первым препятствием и другими первыми препятствиями в пределах заданного расстояния.
Предположим, терминал получает 4 первых препятствия, то есть N равно 4, и 4 первые препятствия включают первое препятствие A, первое препятствие B, первое препятствие C и первое препятствие D. Заданное расстояние составляет 1,5 м, то есть терминал может получить расстояние между каждым первым препятствием и каждым другим первым препятствием в пределах 1,5 м. Например, расстояние между каждыми из двух: первым препятствия A, первым препятствием B, первым препятствием C и первым препятствием D – меньше или равно 1,5 м, при этом, расстояние между первым препятствием A и первым препятствием B составляет 0,4 м, расстояние между первым препятствием A и первым препятствием C составляет 0,3 м, и расстояние между первым препятствием A и первым препятствием D составляет 0,5 м, расстояние между первым препятствием B и первым препятствием D составляет 0,3 м, расстояние между первым препятствием B и первым препятствием C составляет 0,5 м, расстояние между первым препятствием C и первым препятствием D составляет 0,4 м. Можно увидеть, что первое препятствие A, первое препятствие B и первое препятствием C могут сформировать треугольник размером 0,3, 0,4 и 0,5. Первое препятствие B, первое препятствие C и первое препятствие D могут сформировать треугольник размером 0,3, 0,4 и 0,5. Первое препятствие A, первое препятствие C и первое препятствие D могут сформировать треугольник размером 0,3, 0,4 и 0,5. Первое препятствие A, первое препятствие B и первое препятствие D могут сформировать треугольник размером 0,3, 0,4 и 0,5. Первое препятствие A, первое препятствие B, первое препятствие C и первое препятствие D могут сформировать прямоугольник, длина и ширина которого, соответственно, составляют 0,3 и 0,4. Треугольники и прямоугольника представляю собой замкнутые геометрии, то есть S равно 5. Размеры 5 замкнутых геометрий сопоставимы с размерами различных предметов мебели, находящихся в базе данных заданного размера мебели. Поскольку база данных заданного размера мебели включает стул, размер длины и ширины которого, соответственно, составляет 0,3 и 0,4, то можно заметить, что замкнутая геометрия, сопоставимая с мебелью, представляет собой прямоугольник, длина и ширина которого, соответственно, составляют 0,3 и 0,4, то есть 4 первые препятствия могут быть сопоставимы с одним предметом мебели (со стулом).
Предположим, что терминал получает 1 второе препятствие, то есть M равно 1. Положение второго препятствия может представлять собой относительное положение второго препятствия в комнате, то есть может включать расстояние между вторым препятствием и каждой стенкой комнаты, и соотношение второго препятствия к длине каждой стенки комнаты. В соответствии с контуром второго препятствия, относительным положением второго препятствия в комнате и размером комнаты, можно получить размер объекта, представленного вторым препятствием. Например, комната имеет прямоугольную форму, длина и ширина которой, соответственно, составляют 4 м и 3 м; второе препятствие расположено в одном углу комнаты, контур второго препятствия имеет прямоугольную форму, соотношение длины второго препятствия к длине комнаты составляет 1/2, а соотношение ширины второго препятствия к ширине комнаты составляет 3/5, тогда можно увидеть, что размер объекта, представленного вторым препятствием, составляет 2 м*1,8 м. Размер объекта сопоставим с размерами различных предметов мебели, находящихся в базе данных заданного размера мебели, и можно заметить, что мебель, сопоставимая с размером объекта, представляет собой кровать.
В технических решениях вариантов осуществления настоящего изобретения, терминал может определить размеры различных объектов, в соответствии с положениями и/или контурами различных препятствий, и затем он может получить подходящую мебель, сопоставимую с размерами объектов, повышая точность определения мебели.
В одном варианте осуществления настоящего изобретения, при определении Q предметов мебели, расположенных в комнате, в соответствии с размерами S замкнутых геометрий, размерами M объектов и базой данных заданного размера мебели, в первую очередь можно определить множество вариантов каждого из Q предметов мебели, расположенных в комнате, и расположить их в соответствии с размерами S замкнутых геометрий, размерами M объектов и, в первую очередь, в соответствии с базой данных заданного размера мебели. Затем может быть получена команда выбора операции, при этом, команда выбора операции включает конкретный вариант каждого предмета мебели, определенный из множества вариантов предмета мебели. В соответствии с конкретным вариантом каждого предмета мебели, можно получить Q предметы мебели, расположенные в комнате.
В одном примерном варианте осуществления настоящего изобретения, из-за разнообразия мебели, мебель одного и того же размера может быть представлена несколькими типами или стилями. Для того чтобы создать планировку, соответствующую фактической планировке комнаты, когда терминал сопоставляет полученные размеры объектов с базой данных заданного размера мебели, можно вывести множество вариантов мебели, соответствующей каждому объекту, и отобразить варианты, соответствующие каждому объекту, на экране терминала. Пользователь может считать множество вариантов для каждого объекта и затем выбрать один конкретный вариант, удовлетворяющий фактической ситуации, из множества вариантов. Терминал может определить мебель, расположенную в комнате, в соответствии с конкретным вариантом, выбранным пользователем.
Например, терминал определяет 3 варианта мебели, в соответствии с замкнутой геометрией, длина и ширина которой, соответственно, составляют 0,4 м*0,3 м, и базой данных заданного размера мебели, то есть стул, небольшой диван и столик, соответственно, и определяет 2 варианта мебели, в соответствии с объектом, размеры которого составляют 2 м*1,8 м, и базой данных заданного размера мебели, то есть кровать и большой письменный стол, соответственно. Как показано на Фигуре 1с, терминал может отобразить на экране исходный план 100 комнаты и задать изображения стула 10а, небольшого дивана 10b и столика 10с вокруг положения замкнутой геометрии 10, длина и ширина которой, соответственно, составляют 0,4 м*0,3 м, и задать изображения кровати 20а и большого письменного стола 20b вокруг положения объекта, размер которого составляет 2 м*1,8 м. Пользователь может выбрать конкретный вариант замкнутой геометрии 10 из стула 10a, небольшого дивана 10b и столика 10c. Например, пользователь выбирает стул 10а в качестве мебели, соответствующей замкнутой геометрии 10, в соответствии с фактической ситуацией в комнате, и затем пользователь может щелкнуть по изображению стула 10а. Терминал может использовать стул 10a в качестве конкретного варианта мебели, соответствующего замкнутой геометрии 10, после определения щелчка. В то же время пользователь выбирает кровать 20а в качестве мебели, соответствующей объекту, размер которого составляет 2 м*1,8 м, в соответствии с фактической ситуацией в комнате, и затем пользователь может щелкнуть по изображению кровати 20а. Терминал может использовать кровать 20a в качестве конкретного варианта мебели, соответствующей объекту, размер которого составляет 2 м*1,8 м, после определения щелчка. В то же время, в соответствии с конкретным вариантом мебели, соответствующим объекту, размер которого составляет 0,4 м*0,3 м, и конкретным вариантом мебели, соответствующим объекту, размер которого составляет 2 м*1,8 м, терминал может определить два предмета мебели, расположенных в комнате, как стул и кровать.
После определения того факта, что два предмета мебели, расположенных в комнате, представляют собой стул и кровать, терминал может начертить планировку комнаты. Как показано на Фигуре 1d, в соответствии с положением замкнутой геометрии 10, стул 10a обозначен на плане 100 комнаты, и в соответствии с положением объекта 20, кровать 20a обозначена на плане 100 комнаты. Таким образом, можно получить планировку комнаты.
В технических решениях вариантов осуществления настоящего изобретения, при определении множества вариантов мебели, в соответствии с размером объекта, терминал может отобразить на экране множество вариантов для облегчения пользователю выбора конкретного варианта мебели, соответствующего объекту, из множества вариантов, что повышает вариативность и точность черчения планировки и улучшает пользовательский интерфейс.
В одном варианте осуществления настоящего изобретения, как показано на Фигуре 1e, способ дополнительно включает блок 104 и блок 105.
В блоке 104, получают изображение панорамной сцены комнаты.
В блоке 105, Q предметы мебели, расположенные в комнате, чертят на изображении панорамной сцены, и получают панорамную планировку комнаты.
В одном примерном варианте осуществления настоящего изобретения, терминал может получить множество изображений комнаты, регулируя угол съемки и фокусное расстояние камеры, и затем получить изображение панорамной сцены комнаты путем синтеза множества изображений. Изображение панорамной сцены может целиком отобразить обстановку комнаты в прилегающем угле. Затем Q предметы мебели, расположенные в комнате, чертят на изображении панорамной сцены для получения панорамной планировки комнаты. Панорамная планировка также может целиком отобразить мебель, расположенную в комнате, в прилегающем угле, что улучшает восприятие планировки.
Варианты осуществления настоящего изобретения, описанные выше, также применимы к техническим решениям, показанным на Фигуре 1b.
В технических решениях вариантов осуществления настоящего изобретения, терминал может отобразить определенные Q предметы мебели на изображении панорамной сцены комнаты, улучшая восприятие планировки и улучшая пользовательский интерфейс.
Сторона робота
Фигура 2 представляет собой блок-схему, показывающую способ черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения. Как показано на Фигуре 2, этот способ черчения планировки комнаты применяется в роботе-подметателе, и он включает блок 201 и блок 202.
В блоке 201, положения N первых препятствий и контуров, и положения M вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, обозначены на графе пути подметания.
Нижняя область первого препятствия – меньше или равна первому заданному пороговому значению, а нижняя область второго препятствия – больше или равна второму заданному пороговому значению, где N и M представляют собой целые числа, которые – больше или равны 0.
В одном примерном варианте осуществления настоящего изобретения, робот-подметатель может натолкнуться на множество препятствий во время подметания комнаты. Некоторые препятствия представляют собой фиксированные препятствия, такие как, края мебели или опорная часть мебели. Некоторые препятствия представляют собой подвижные препятствия, такие как, ноги пользователя или лапы питомца. Для того, чтобы избежать обозначения некоторых подвижных препятствий на графе пути подметания и неточности черчения планировки комнаты, робот-подметатель может определить количество наталкиваний на препятствия перед обозначением препятствия. Когда количество наталкиваний на препятствие, находящееся в одном и том же положении, – большое, то это указывает на тот факт, что препятствие представляет собой фиксированное препятствие, и оно может быть отмечено на графе пути подметания.
Рассмотрим контрольное препятствие в качестве примера, в роботе-подметателе может быть предусмотрен счетчик, соответствующий контрольному препятствию. Каждый раз, наталкиваясь на контрольное препятствие, робот-подметатель дает команду счетчику добавить 1, и определяет наличие того факта, больше ли или равны данные, записанные в счетчике, заданному количеству наталкиваний. Когда данные, записанные в счетчике, – больше или равны заданному количеству наталкиваний, то это указывает на тот факт, что количество наталкиваний робота-подметателя на контрольное препятствие – велико, и контрольное препятствие можно рассматривать как фиксированное препятствие. В то же время, робот-подметатель может получить нижнюю область контрольного препятствия. Когда нижняя область контрольного препятствия – большая, то есть больше или равна второму заданному пороговому значению, то контур и положение контрольного препятствия могут быть получены, в соответствии со сканированным изображением, и контрольное препятствие может быть обозначено на графе пути подметания в виде второго препятствия. Когда нижняя область контрольного препятствия – небольшая, то есть меньше или равна первому заданному пороговому значению, то положение контрольного препятствия может быть получено, в соответствии со сканированным изображением, и контрольное препятствие может быть обозначено на графе пути подметания в виде первого препятствия.
В частности, робот-подметатель может оценить длину и ширину нижней части контрольного препятствия, в соответствии со сканированным изображением, и затем получить нижнюю область контрольного препятствия. Нижняя область первого препятствия может представлять собой контактную область первого препятствия с землей, а нижняя область второго препятствия может представлять собой контактную область второго препятствия с землей. В практическом применении, первое заданное пороговое значение и второе заданное пороговое значение могут быть заданы в соответствии с конкретными ситуациями, которые не ограничиваются вариантами осуществления настоящего изобретения. В альтернативном варианте осуществления настоящего изобретения, первое заданное пороговое значение – меньше второго заданного порогового значения.
В блоке 202, граф пути подметания, обозначенный положениями N первых препятствий и контуров, и положениями M вторых препятствий, передается на терминал.
В одном примерном варианте осуществления настоящего изобретения, робот-подметатель может быть подсоединен к терминалу посредством инфракрасного излучения, Bluetooth или беспроводной сети. После получения графа пути подметания, обозначенного положениями N первых препятствий и контуров, и положениями M вторых препятствий, граф пути подметания может быть передан на терминал посредством соединительного тракта для того, чтобы облегчить терминалу черчение планировки комнаты.
В технических решениях вариантов осуществления настоящего изобретения, робот-подметатель может обозначать препятствия, на которые он наталкивается при подметании комнаты, на графе пути подметания, и передавать граф пути подметания на терминал для того, чтобы облегчить терминалу черчение планировки комнаты, создавая, таким образом, еще больше удобств и повышая точность черчения планировки комнаты, и улучшая пользовательский интерфейс.
Процесс реализации подробно описан в нижеупомянутых вариантах осуществления настоящего изобретения.
Фигура 3 представляет собой диаграмму взаимодействия, показывающую способ черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения. Как показано на Фигуре 3, способ включает нижеупомянутые блоки 301-307.
В блоке 301, робот-подметатель обозначает положения N первых препятствий и контуров, и положения M вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, на графе пути подметания.
В блоке 302, робот-подметатель передает граф пути подметания, обозначенный положениями N первых препятствий и контуров, и положениями M вторых препятствий, на терминал.
В блоке 303, терминал получает расстояние между каждым первым препятствием и каждым другим первым препятствием в пределах заданного расстояния, в соответствии с положениями N первых препятствий.
В блоке 304, терминал получает размеры S замкнутых геометрий, сформированных N первыми препятствиями, в соответствии с расстоянием между другими первыми препятствиями в пределах заданного расстояния и каждым первым препятствием.
В блоке 305, терминал определяет размеры M объектов, представленных M вторыми препятствиями, в соответствии с контурами и положениями M вторых препятствий, и размером комнаты.
В блоке 306, терминал определяет Q предметы мебели, расположенные в комнате, в соответствии с размерами S замкнутых геометрий, размерами M объектов и базой данных заданного размера мебели.
В блоке 307, терминал обозначает Q предметы мебели на плане комнаты для создания планировки комнаты.
С помощью способа черчения планировки комнаты, в соответствии с вариантами осуществления настоящего изобретения, терминал может определить мебель, расположенную в убранной комнате, в соответствии с графом пути подметания, переданным роботом-подметателем, и препятствиями, обозначенными на графе пути подметания, создавая еще больше удобств и повышая точность черчения планировки комнаты, и улучшая пользовательский интерфейс.
Фигура 4 представляет собой диаграмму взаимодействия, показывающую способ черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения. Как показано на Фигуре 4, способ включает блоки 401-410.
В блоке 401, робот-подметатель обозначает положения N первых препятствий и контуров, и положения M вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, на графе пути подметания.
В блоке 402, робот-подметатель передает граф пути подметания, обозначенный положениями N первых препятствий и контуров, и положениями M вторых препятствий, на терминал.
В блоке 403, терминал получает расстояние между каждым первым препятствием и каждым другим первым препятствием в пределах заданного расстояния, в соответствии с положениями N первых препятствий.
В блоке 404, терминал получает размеры S замкнутых геометрий, сформированных N первыми препятствиями, в соответствии с расстоянием между каждым первым препятствием и каждым другим первым препятствиями в пределах заданного расстояния.
В блоке 405, терминал определяет размеры M объектов, представленных M вторыми препятствиями, в соответствии с контурами и положениями M вторых препятствий и размером комнаты.
В блоке 406, терминал определяет и отображает множество вариантов каждого из Q предметов мебели, расположенных в комнате, в соответствии с размерами S замкнутых геометрий, размерами M объектов и базой данных заданного размера мебели.
В блоке 407, терминал получает команду выбора операции, при этом, команда выбора операции включает конкретный вариант каждого предмета мебели, определенный из множества вариантов предмета мебели.
В блоке 408, терминал определяет Q предметы мебели, расположенные в комнате, в соответствии с конкретным вариантом каждого предмета мебели.
В блоке 409, терминал получает изображение панорамной сцены комнаты.
В блоке 410, терминал чертит Q предметы мебели, расположенные в комнате, на изображении панорамной сцены для получения панорамной планировки комнаты.
С помощью способа черчения планировки комнаты, в соответствии с вариантами осуществления настоящего изобретения, терминал может определить мебель, расположенную в убранной комнате, в соответствии с графом пути подметания, переданным роботом-подметателем, и препятствиями, обозначенными на графе пути подметания, создавая еще больше удобств и повышая точность черчения планировки комнаты, и улучшая пользовательский интерфейс.
Ниже приведены варианты осуществления устройства по настоящему изобретению, которое может использоваться для реализации вариантов способа по настоящему изобретению.
Фигура 5a представляет собой блок-диаграмму, показывающую устройство 50 для черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения. Устройство 50 может быть реализовано как часть или все электронное устройство посредством программного обеспечения, аппаратного обеспечения или их комбинации. Как показано на Фигуре 5а, устройство 50 для черчения планировки комнаты включает первый модуль получения 501, модуль определения 502 и модуля создания 503.
Первый модуль получения 501 выполнен с возможностью получения графа пути подметания робота-подметателя. Граф пути подметания включает положения N первых препятствий и контуров, и положения M вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты. Нижняя область первого препятствия – меньше или равна первому заданному пороговому значению, а нижняя область второго препятствия – больше или равна второму заданному пороговому значению, где N и M представляют собой целые числа, которые – больше или равны 0.
Модуль определения 502 выполнен с возможностью определения Q предметов мебели, расположенных в комнате, в соответствии с положениями N первых препятствий и контуров, и положениями M вторых препятствий, где Q представляет собой целое число, которое – больше или равно 0, и меньше или равно (N+M).
Модуль создания 503 выполнен с возможностью обозначения Q предметов мебели на плане комнаты для создания планировки комнаты.
В одном варианте осуществления настоящего изобретения, первое заданное пороговое значение – меньше второго заданного порогового значения.
В одном варианте осуществления настоящего изобретения, как показано на Фигуре 5b, модуль определения 502 включает первый субмодуль получения 5021, второй субмодуль получения 5022, первый субмодуль определения 5023 и второй субмодуль определения 5024.
Первый субмодуль получения 5021 выполнен с возможностью получения расстояния между каждым первым препятствием и каждым другим первым препятствием в пределах заданного расстояния, в соответствии с положениями N первых препятствий.
Второй субмодуль получения 5022 выполнен с возможностью получения размеров S замкнутых геометрий, сформированных N первыми препятствиями, в соответствии с расстоянием между каждым первым препятствием и каждым другим первым препятствием в пределах заданного расстояния.
Первый субмодуль определения 5023 выполнен с возможностью определения размеров M объектов, представленных M вторыми препятствиями, в соответствии с контурами и положениями M вторых препятствий, и размером комнаты.
Второй субмодуль определения 5024 выполнен с возможностью определения Q предметов мебели, расположенных в комнате, в соответствии с размерами S замкнутых геометрий, размерами M объектов и базой данных заданного размера мебели.
В одном варианте осуществления настоящего изобретения, как показано на Фигуре 5c, второй субмодуль определения 5024 включает блок определения и отображения 5024a, блок получения 5024b и блок определения 5024c.
Блок определения и отображения 5024a выполнен с возможностью определения и отображения множества вариантов каждого из Q предметов мебели, расположенных в комнате, в соответствии с размерами S замкнутых геометрий, размерами M объектов и базой данных заданного размера мебели.
Блок получения 5024b выполнен с возможностью получения команды выбора операции, причем команда выбора операции включает конкретный вариант каждого предмета мебели, определенный из множества вариантов предмета мебели.
Блок определения 5024c выполнен с возможностью определения Q предметов мебели, расположенных в комнате, в соответствии с конкретным вариантом каждого предмета мебели.
В одном варианте осуществления настоящего изобретения, как показано на Фигуре 5d, устройство 50 дополнительно включает второй модуль получения 504 и третий модуль получения 505.
Второй модуль получения 504 выполнен с возможностью получения изображения панорамной сцены комнаты.
Третий модуль получения 505 выполнен с возможностью черчения Q предметов мебели, расположенных в комнате, на изображении панорамной сцены для получения панорамной планировки комнаты.
Варианты осуществления настоящего изобретения предлагают устройство для черчения планировки комнаты, которое может определять мебель, расположенную в убранной комнате, в соответствии с графом пути подметания, переданным роботом-подметателем, и препятствиями, обозначенными на графе пути подметания, создавая еще больше удобств и повышая точность черчения планировки комнаты, и улучшая пользовательский интерфейс.
Фигура 6a представляет собой блок-диаграмму, показывающую устройство 60 для черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения. Устройство 60 может быть реализовано как часть или все электронное устройство посредством программного обеспечения, аппаратного обеспечения или их комбинации. Как показано на Фигуре 6а, устройство 60 для черчения планировки комнаты включает модуль обозначения 601 и модуль передачи 602.
Модуль обозначения 601 выполнен с возможностью обозначения положений N первых препятствий и контуров, и положений M вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, на графе пути подметания. Нижняя область первого препятствия – меньше или равна первому заданному пороговому значению, а нижняя область второго препятствия – больше или равна второму заданному пороговому значению, где N и M представляют собой целые числа, которые – больше или равны 0.
Модуль передачи 602 выполнен с возможностью передачи графа пути подметания, обозначенного положениями N первых препятствий и контуров, и положениями M вторых препятствий, на терминал.
В одном варианте осуществления настоящего изобретения, первое заданное пороговое значение – меньше второго заданного порогового значения.
В одном варианте осуществления настоящего изобретения, как показано на Фигуре 6b, модуль обозначения включает третий субмодуль получения 6011, первый субмодуль обозначения 6012 и второй субмодуль обозначения 6013.
Третий субмодуль получения 6011 выполнен с возможностью получения нижней области контрольного препятствия, когда количество наталкиваний на контрольное препятствие при подметании комнаты – больше или равно заданному количеству наталкиваний.
Первый субмодуль обозначения 6012 выполнен с возможностью обозначения контрольного препятствия в качестве первого препятствия на графе пути подметания, в соответствии с положением контрольного препятствия, когда нижняя область контрольного препятствия – меньше или равна первому заданному пороговому значению.
Второй субмодуль обозначения 6013 выполнен с возможностью обозначения контрольного препятствия в качестве второго препятствия на графе пути подметания, в соответствии с контуром контрольного препятствия и положением контрольного препятствия, когда нижняя область контрольного препятствия – больше или равна второму заданному пороговому значению.
Варианты осуществления настоящего изобретения предлагают устройство для черчения планировки комнаты, которое может обозначать препятствия, на которые наталкивается робот-подметатель при подметании комнаты, на графе пути подметания и передавать граф пути подметания на терминал, в результате чего, терминал может начертить планировку комнаты, создавая, таким образом, еще больше удобств и повышая точность черчения планировки комнаты, и улучшая пользовательский интерфейс.
Варианты осуществления настоящего изобретения предлагают устройство для черчения планировки комнаты, и устройство для черчения планировки комнаты включает первый процессор и первую память. Первая память выполнена с возможностью хранения команд, выполняемых первым процессором.
Первый процессор выполнен с возможностью: получения графа пути подметания робота-подметателя, причем граф пути подметания включает положения N первых препятствий и контуров, и положения M вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, причем нижняя область первого препятствия – меньше или равна первому заданному пороговому значению, а нижняя область второго препятствия – больше или равна второму заданному пороговому значению, где N и M представляют собой целые числа, которые – больше или равны 0; определения Q предметов мебели, расположенных в комнате, в соответствии с положениями N первых препятствий и контуров, и положениями M вторых препятствий, где Q представляет собой целое число, которое больше или равно 0, и меньше или равно (N+M); и обозначения Q предметов мебели на плане комнаты для создания планировки комнаты.
В одном варианте осуществления настоящего изобретения, первое заданное пороговое значение – меньше второго заданного порогового значения.
В одном варианте осуществления настоящего изобретения, первый процессор выполнен с дополнительной возможностью получения расстояния между каждым первым препятствием и каждым другим первым препятствием в пределах заданного расстояния, в соответствии с положениями N первых препятствий; получения размеров S замкнутых геометрий, сформированных N первыми препятствиями, в соответствии с расстоянием между каждым первым препятствием и каждым другим первым препятствием в пределах заданного расстояния; определения размеров M объектов, представленных M вторыми препятствиями, в соответствии с контурами и положениями M вторых препятствий, и размером комнаты; и определения Q предметов мебели, расположенных в комнате, в соответствии с размерами S замкнутых геометрий, размерами M объектов и базой данных заданного размера мебели.
В одном варианте осуществления настоящего изобретения, первый процессор выполнен с дополнительной возможностью: определения и отображения множества вариантов каждого из Q предметов мебели, расположенных в комнате, в соответствии с размерами S замкнутых геометрий, размерами M объектов и базой данных заданного размера мебели; получения команды выбора операции, причем команда выбора операций включает конкретный вариант каждого предмета мебели, определенный из множества вариантов каждого предмета мебели; и определения Q предметов мебели, расположенных в комнате, в соответствии с конкретным вариантом каждого предмета мебели.
В одном варианте осуществления настоящего изобретения, первый процессор выполнен с возможностью: получения изображения панорамной сцены комнаты; и черчения Q предметов мебели, расположенных в комнате, на изображении панорамной сцены для получения панорамной планировки комнаты.
С помощью устройства для черчения планировки комнаты, в соответствии с вариантами осуществления настоящего изобретения, устройство может определять мебель, расположенную в убранной комнате, в соответствии с графом пути подметания, переданным роботом-подметателем, и препятствиями, обозначенными на графе пути подметания, создавая еще больше удобств и повышая точность черчения планировки комнаты, и улучшая пользовательский интерфейс.
Варианты осуществления настоящего изобретения предлагают устройство для черчения планировки комнаты, и устройство для черчения планировки комнаты включает второй процессор и вторую память. Вторая память выполнена с возможностью хранения команд, выполняемых вторым процессором.
Второй процессор выполнен с возможностью: обозначения положений N первых препятствий и контуров, и положений M вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, на графе пути подметания, причем нижняя область первого препятствия – меньше или равна первому заданному пороговому значению, а нижняя область второго препятствия – больше или равна второму заданному пороговому значения, где N и M представляют собой целые числа, которые – больше или равны 0; и передачи графа пути подметания, обозначенного положениями N первых препятствий и контуров, и положениями M вторых препятствий, на терминал.
В одном варианте осуществления настоящего изобретения, первое заданное пороговое значение – меньше второго заданного порогового значения.
В одном варианте осуществления настоящего изобретения, второй процессор выполнен с дополнительной возможностью получения нижней области контрольного препятствия, когда количество наталкиваний на контрольное препятствие при подметании комнаты – больше или равно заданному количеству наталкиваний; когда нижняя область контрольного препятствия – меньше или равна первому заданному пороговому значению, обозначения контрольного препятствия в качестве первого препятствия на графе пути подметания, в соответствии с положением контрольного препятствия; и когда нижняя область контрольного препятствия – больше или равна второму заданному пороговому значению, обозначения контрольного препятствия в качестве второго препятствия на графе пути подметания, в соответствии с контуром контрольного препятствия и положением контрольного препятствия.
Устройство для черчения планировки комнаты, в соответствии с вариантами осуществления настоящего изобретения, может обозначать препятствия, на которые наталкивается робот-подметатель при подметании комнаты, на графе пути подметания и передавать граф пути подметания на терминал, в результате чего терминал может начертить планировку комнаты, создавая, таким образом, еще больше удобств и повышая точность черчения планировки комнаты, и улучшая пользовательский интерфейс.
Что касается устройств в вышеупомянутых вариантах осуществления настоящего изобретения, то конкретные способы осуществления операций для отдельных модулей, приведенных в этих вариантах, были подробно описаны в вариантах осуществления настоящего изобретения, относящихся к способам черчения планировки комнаты, которые не будут конкретизироваться в настоящем документе.
Фигура 7 представляет собой схему, показывающую устройство 70 для черчения планировки комнаты, в соответствии с примерным вариантом осуществления настоящего изобретения. Устройство 70 применимо к терминальному устройству. Например, устройство 70 может представлять собой мобильный телефон, компьютер, терминал цифрового вещания, устройство обмена сообщениями, игровую консоль, планшет, медицинский аппарат, тренажер и персональный цифровой помощник.
Устройство 70 может включать, по меньшей мере, один компонент из следующих: компонент обработки 702, память 704, компонент электропитания 706, мультимедийный компонент 707, аудиокомпонент 710, интерфейс ввода/вывода (I/O) 712, сенсорный компонент 714 и коммуникационный компонент 716.
Компонент обработки 702 обычно управляет общими операциями устройства 70, такими как, операциями, связанными с отображением, телефонными звонками, обменом данными, операциями с камерой и операциями записи. Компонент обработки 702 может включать, по меньшей мере, один процессор 720 для выполнения команд для того, чтобы выполнить все или часть этапов из вышеописанных способов. Кроме того, компонент обработки 702 может включать, по меньшей мере, один модуль, который облегчает взаимодействие между компонентом обработки 702 и другими компонентами. Например, компонент обработки 702 может включать мультимедийный модуль для облегчения взаимодействия между мультимедийным компонентом 708 и компонентом обработки 702.
Память 704 выполнена с возможностью хранения различных типов данных для поддержания работы устройства 70. Примеры таких данных включают команды для любых приложений или способов, используемых на устройстве 70, контактных данных, данных телефонной книги, сообщений, изображений, видео и так далее. Память 704 может быть реализована с использованием энергозависимых или энергонезависимых запоминающих устройств любого типа или их комбинации, таких как, статическое оперативное запоминающее устройство (SRAM), электрически-стираемое программируемое постоянное запоминающее устройство (EEPROM), стираемое программируемое постоянное запоминающее устройство (EPROM), программируемое постоянное запоминающее устройство (PROM), постоянное запоминающее устройство (ROM), магнитная память, флэш-память, магнитный или оптический диск.
Компонент электропитания 706 подводит электричество к различным компонентам устройства 70. Компонент электропитания 706 может включать систему управления электричеством, по меньшей мере, один источник электричества и любые другие компоненты, связанные с генерацией, управлением и распределением электричества в устройстве 70.
Мультимедийный компонент 708 включает экран, обеспечивающий выходной интерфейс между устройством 70 и пользователем. В некоторых вариантах осуществления настоящего изобретения экран может включать жидкокристаллический дисплей (LCD) и сенсорную панель (TP). Если экран включает сенсорную панель, то экран может быть реализован как сенсорный экран для приема входных сигналов от пользователя. Сенсорная панель включает, по меньшей мере, один сенсорный датчик для восприятия касаний, скольжений и действий на сенсорной панели. Сенсорные датчики могут не только воспринимать границу касания или скольжения, но и воспринимать длительность и нажатие, связанные с касанием или скольжением. В некоторых вариантах осуществления настоящего изобретения, мультимедийный компонент 708 включает переднюю камеру и/или заднюю камеру. Когда устройство 70 находится в рабочем режиме, например, в режиме съемки или в режиме видео, то передняя камера и/или задняя камера может принимать внешние мультимедийные данные. Каждая передняя и задняя камера может представлять собой фиксированную систему оптического объектива или иметь возможность фокусировки расстояния и оптического увеличения.
Аудиокомпонент 710 выполнен с возможностью осуществления вывода и/или ввода аудиосигналов. Например, аудиокомпонент 710 включает микрофон («MIC»), выполненный с возможностью приема внешнего аудиосигнала, когда устройство 70 находится в рабочем режиме, например, в режиме совершения звонка, режиме записи и режиме распознавания голоса. Принятый аудиосигнал может дополнительно сохраняться в памяти 704 или передаваться посредством коммуникационного компонента 716. В некоторых вариантах осуществления настоящего изобретения, аудиокомпонент 710 дополнительно включает динамик для вывода аудиосигналов.
Интерфейс ввода/вывода 712 представляет собой интерфейс между компонентом обработки 702 и периферийными интерфейсными модулями, такими как, клавиатура, колесо клика, кнопки и тому подобное. Кнопки могут включать, но без ограничения, кнопку возврата, кнопку громкости, кнопку запуска и кнопку блокировки.
Сенсорный компонент 714 включает, по меньшей мере, один датчик для обеспечения статуса оценки различных аспектов устройства 70. Например, сенсорный компонент 714 может определять открытый/закрытый статус устройства 70, относительное позиционирование компонентов, например, дисплея и клавиатуры, устройства 70, изменение положения устройства 70 или компонента устройства 70, наличие или отсутствие контакта пользователя с устройством 70, ориентацию или ускорение/замедление работы устройства 70 и изменение температуры устройства 70. Сенсорный компонент 714 может включать датчик присутствия, выполненный с возможностью определения присутствия соседних объектов без какого-либо физического контакта. Сенсорный компонент 714 может также включать датчик освещенности, такой как датчик изображения CMOS (комплементарный металло-оксидный полупроводник) или CCD (токовый формирователь ЗУ на магнитных сердечниках), для использования в приложениях, предназначенных для обработки изображений. В некоторых вариантах осуществления настоящего изобретения, сенсорный компонент 714 может также включать сенсорный датчик акселерометра, сенсорный датчик гироскопа, магнитный сенсорный датчик, сенсорный датчик нажатия или сенсорный датчик температуры.
Коммуникационный компонент 716 выполнен с возможностью облегчения проводной или беспроводной связи между устройством 70 и другими устройствами. Устройство 70 может осуществлять доступ к беспроводной сети на основе коммуникационного стандарта, такого как, WiFi, 2G или 3G, или их комбинации. В одном примерном варианте осуществления настоящего изобретения, коммуникационный компонент 716 принимает широковещательный сигнал или связанную с широковещанием информацию из внешней системы управления широковещанием посредством широковещательного канала. В одном примерном варианте осуществления настоящего изобретения коммуникационный компонент 716 дополнительно включает модуль связи ближнего радиуса действия (NFC) для облегчения связи малого радиуса действия. Например, модуль NFC может быть реализован на основе технологии радиочастотной идентификации (RFID), технологии ассоциация передачи данных в инфракрасном диапазоне (IrDA), сверхширокополосной технологии (UWB), технологии Bluetooth (BT) и других технологий.
В примерных вариантах осуществления настоящего изобретения, устройство 70 может быть реализовано с помощью, по меньшей мере, одной специализированной интегральной микросхемы (ASIC), цифрового сигнального процессора (DSP), цифрового устройства обработки сигналов (DSPD), программируемого логического устройства (PLD), программируемой пользователем матрицы логических элементов (FPGA), контроллера, микроконтроллера, микропроцессора или другого электронного компонента для выполнения вышеописанных способов.
В примерных вариантах осуществления настоящего изобретения, предлагается также энергонезависимый машиночитаемый носитель данных, включающий команды, такие как, команды, включенные в память 704, выполняемые процессором 720 в устройстве 70, для выполнения вышеописанных способов. Например, энергонезависимый машиночитаемый носитель данных может представлять собой ROM, RAM, CD-ROM, магнитную ленту, гибкий диск, оптическое устройство хранения данных и тому подобное.
Фигура 8 представляет собой схему, показывающую устройство 80 для черчения планировки комнаты, в соответствии с другим примерным вариантом осуществления настоящего изобретения. Устройство 80 включает компонент обработки 802, и компонент обработки 802 дополнительно включает, по меньшей мере, один процессор и ресурс памяти, представленный памятью 803. Ресурс памяти выполнен с возможностью хранения команд, выполняемых компонентом обработки 802, например, прикладными программами. Программа приложения, хранящая в памяти 803, может включать, по меньшей мере, один модуль, соответствующий набору команд. Кроме того, компонент обработки 802 выполнен с возможностью выполнения команд для выполнения способа, показанного на Фигуре 2.
Устройство дополнительно включает компонент электропитания 806, выполненный с возможностью управления электропитанием устройства 80, проводной или беспроводной сетевой интерфейс 805, выполненный с возможностью подсоединения к сети, и интерфейс ввода/вывода (I/O) 808. Устройство 80 может работать на основе операционной системы, хранящейся в памяти 803, например, Windows Server TM, Mac OS XTM, Unix ТМ, Linux TM, Free BSDTM или тому подобное.
Варианты осуществления настоящего изобретения предлагают энергонезависимый машиночитаемый носитель данных. Когда команды, хранящиеся на носителе данных, выполняются процессором устройства 70, то устройство 70 может выполнять способ черчения планировки комнаты на стороне терминала.
Этот способ включает: получение графа пути подметания робота-подметателя, причем граф пути подметания включает положения N первых препятствий и контуров, и положения М вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, причем нижняя область первого препятствия – меньше или равна первому заданному пороговому значению, а нижняя область второго препятствия – больше или равна второму заданному пороговому значению, где N и M представляют собой целые числа, которые – больше или равны 0; определение Q предметов мебели, расположенных в комнате, в соответствии с положениями N первых препятствий и контуров, и положениями M вторых препятствий, где Q представляет собой целое число, которое – больше или равно 0, и меньше или равно (N+M); и обозначение Q предметов мебели на плане комнаты для создания планировки комнаты.
В одном варианте осуществления настоящего изобретения, первое заданное пороговое значение – меньше второго заданного порогового значения.
В одном варианте осуществления настоящего изобретения, определение Q предметов мебели, расположенных в комнате, в соответствии с положениями N первых препятствий и контуров, и положениями M второго препятствия, включает: получение расстояния между каждым первым препятствием и каждым другим первым препятствием в пределах заданного расстояния, в соответствии с положениями N первых препятствий; получение размеров S замкнутых геометрий, сформированных N первыми препятствиям, в соответствии с расстоянием между каждым первым препятствием и каждым другим первым препятствием в пределах заданного расстояния; определение размеров М объектов, представленных М вторыми препятствиями, в соответствии с контурами и положениями М вторых препятствий, и размера комнаты; и определение Q предметов мебели, расположенных в комнате, в соответствии с размерами S замкнутых геометрий, размерами M объектов и базой данных заданного размера мебели.
В одном варианте осуществления настоящего изобретения, определение Q предметов мебели, расположенных в комнате, в соответствии с размерам S замкнутых геометрий, размерами M объектов и базой данных заданного размера мебели, включает: определение и отображение множественности вариантов каждого из Q предметов мебели, расположенных в комнате, в соответствии с размерам S замкнутых геометрий, размерами M объектов и базой данных заданного размера мебели; получение команды выбора операции, причем команда выбора операции включает конкретный вариант каждого предмета мебели, определенный из множества вариантов каждого предмета мебели; и определение Q предметов мебели, расположенных в комнате, в соответствии конкретным вариантом каждого предмета мебели.
В одном варианте осуществления настоящего изобретения, способ дополнительно включает: получение изображения панорамной сцены комнаты; и черчение Q предметов мебели, расположенных в комнате, на изображении панорамной сцены для получения панорамной планировки комнаты.
Варианты осуществления настоящего изобретения предлагают другой энергонезависимый машиночитаемый носитель данных. Когда команды, хранящиеся на носителе данных, выполняются процессором устройства 80, то устройство 80 может выполнять способ черчения планировки комнаты на стороне робота.
Способ включает: обозначение положений N первых препятствий и контуров, и положений M вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, на графе пути подметания, причем нижняя область первого препятствия – меньше или равна первому заданному пороговому значению, а нижняя область второго препятствия – больше или равна второму заданному пороговому значению, где N и M представляют собой целые числа, которые – большими или равны 0; и передачу графа пути подметания, обозначенного положениями N первых препятствий и контуров, и положениями M вторых препятствий, на терминал.
В одном варианте осуществления настоящего изобретения, первое заданное пороговое значение – меньше второго заданного порогового значения.
В одном варианте осуществления настоящего изобретения, обозначение положений N первых препятствий и контуров, и положений M вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, на графе пути подметания включает: получение нижней области контрольного препятствия, когда количество наталкиваний на контрольное препятствие при подметании комнаты – больше или равно заданному количеству наталкиваний; когда нижняя область контрольного препятствия – меньше или равна первому заданному пороговому значению, обозначение контрольного препятствия в качестве первого препятствия на графе пути подметания, в соответствии с положением контрольного препятствия; и когда нижняя область контрольного препятствия – больше или равна второму заданному пороговому значению, обозначение контрольного препятствия в качестве второго препятствия на графе пути подметания, в соответствии с контуром контрольного препятствия и положением контрольного препятствия.
Другие варианты осуществления настоящего изобретения будут очевидны для специалистов в данной области техники из рассмотрения описания и практики применения настоящего изобретения, раскрытого в настоящем документе. Настоящая заявка предназначена для охвата любых изменений, для использования или адаптации настоящего изобретения, в соответствии с его общими принципами, и включая такие отклонения от настоящего изобретения, которые присутствуют в известной или обычной практике в данной области техники. Предполагается, что описание и примеры должны рассматриваться только как примерные, при этом истинный объем и принцип настоящего изобретения указаны в нижеприведенной формуле изобретения.
Понятно, что настоящее изобретение не ограничивается конкретным устройством, которое было описано выше и показано на сопроводительных чертежах, и что различные модификации и изменения могут быть сделаны, не выходя за пределы его объема. Предполагается, что объем настоящего изобретения ограничивается только прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство для уборки | 2017 |
|
RU2673857C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ПОВЕДЕНИЯ ПОЛЬЗОВАТЕЛЯ | 2015 |
|
RU2628127C2 |
| СПОСОБ И УСТРОЙСТВО ВЫВОДА ИЗОБРАЖЕНИЯ | 2016 |
|
RU2667368C1 |
| СПОСОБ БЕСШУМНОЙ РАБОТЫ, И ОБОРУДОВАНИЕ УСТРОЙСТВА АВТОМАТИЧЕСКОЙ ОЧИСТКИ, И ЭЛЕКТРОННОЕ УСТРОЙСТВО | 2015 |
|
RU2628421C2 |
| РОЛИКОВАЯ КОНСТРУКЦИЯ И СПОСОБ АВТОНОМНОГО ПЕРЕМЕЩЕНИЯ УСТРОЙСТВ СО ВСТРОЕННОЙ РОЛИКОВОЙ КОНСТРУКЦИЕЙ | 2018 |
|
RU2752500C2 |
| СПОСОБ ЗАРЯДКИ И ЗАРЯДНОЕ УСТРОЙСТВО РОБОТА-УБОРЩИКА | 2017 |
|
RU2704603C1 |
| СПОСОБ И АППАРАТ ДЛЯ ОТОБРАЖЕНИЯ КОНТЕНТА | 2015 |
|
RU2665234C2 |
| РОБОТ-УБОРЩИК И СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РОБОТОМ-УБОРЩИКОМ | 2019 |
|
RU2800503C1 |
| РОБОТ-ПЫЛЕСОС | 2007 |
|
RU2423905C2 |
| АНАЛИТИЧЕСКИЕ МОДЕЛИ КАРТЫ | 2009 |
|
RU2497188C2 |
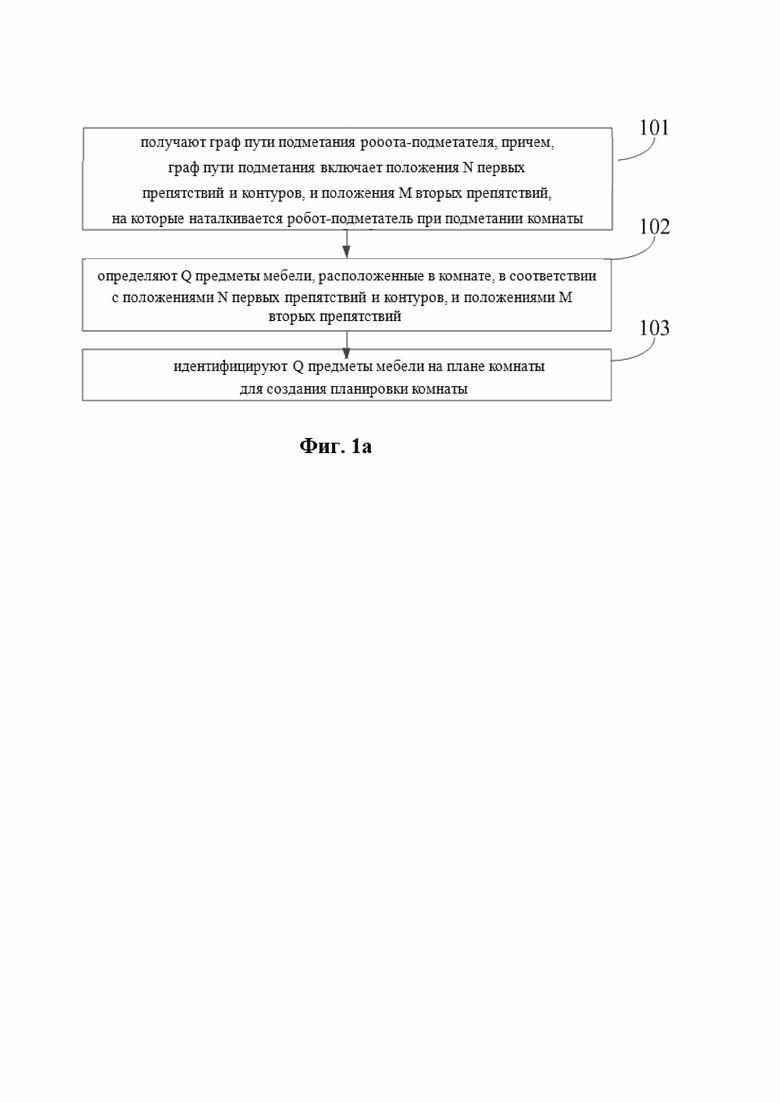
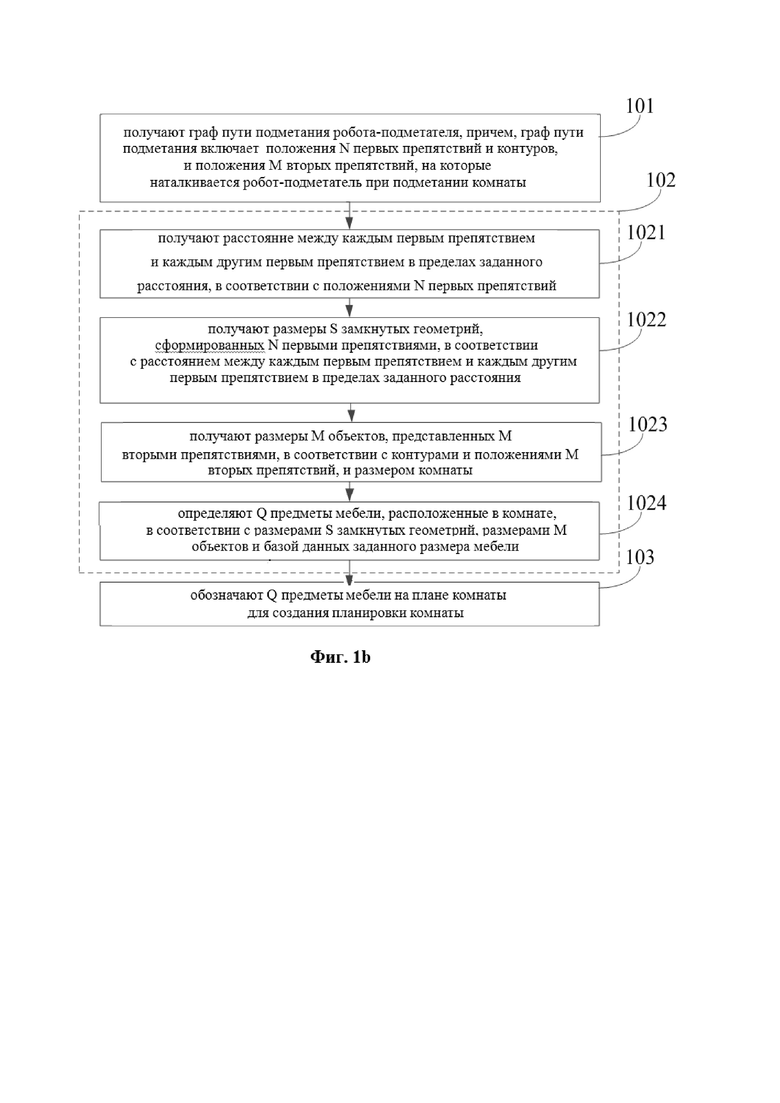
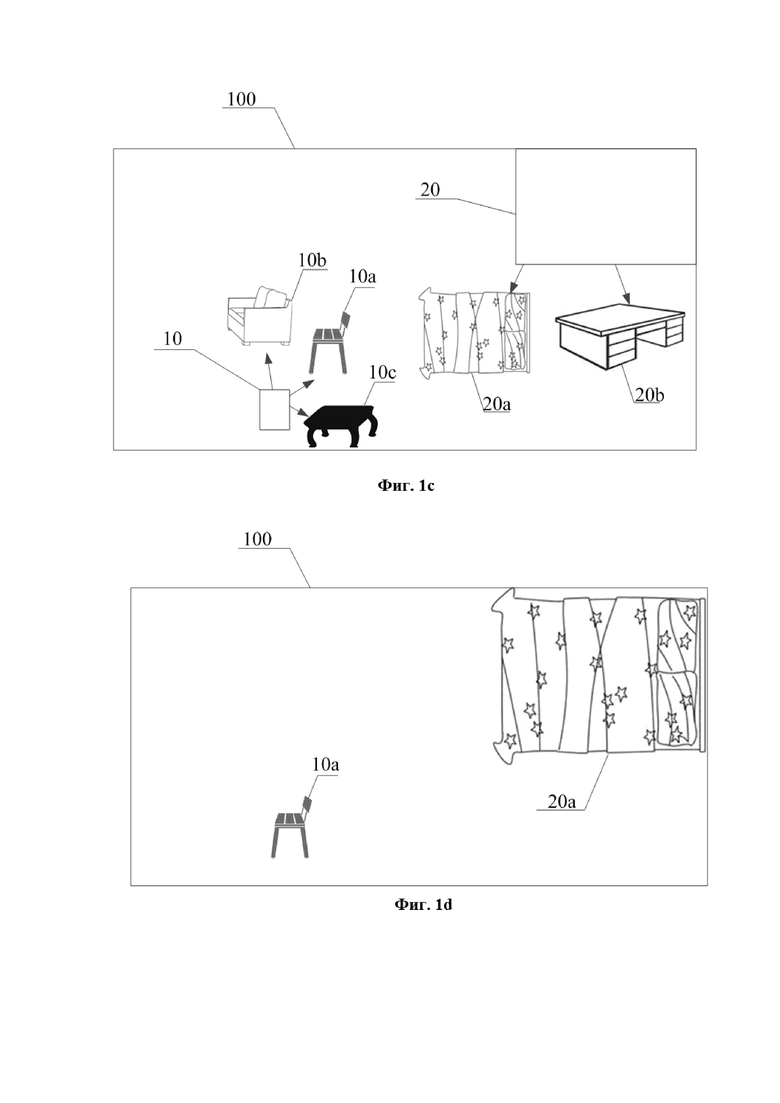
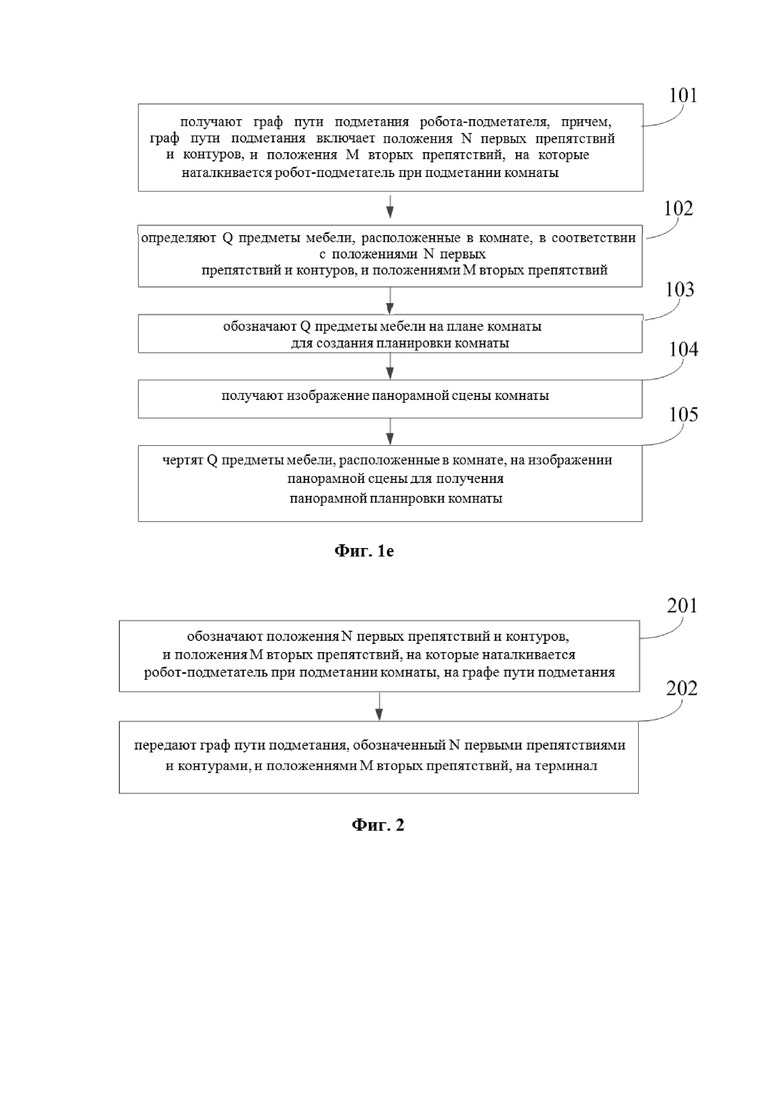
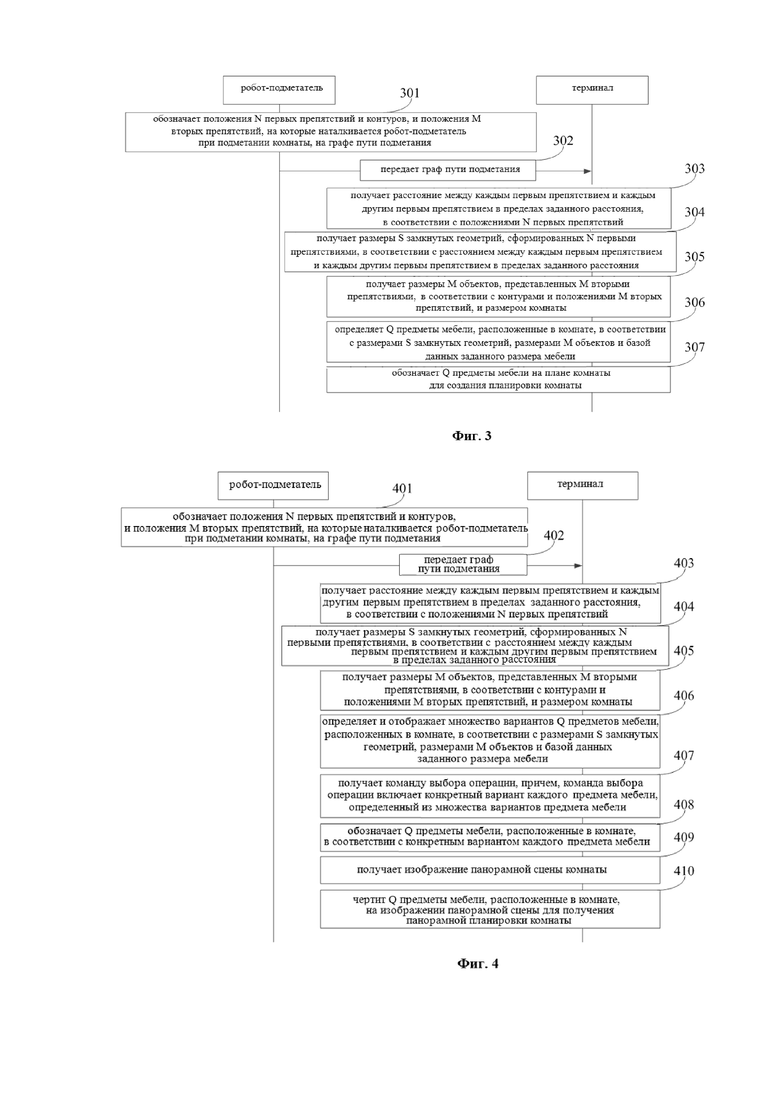
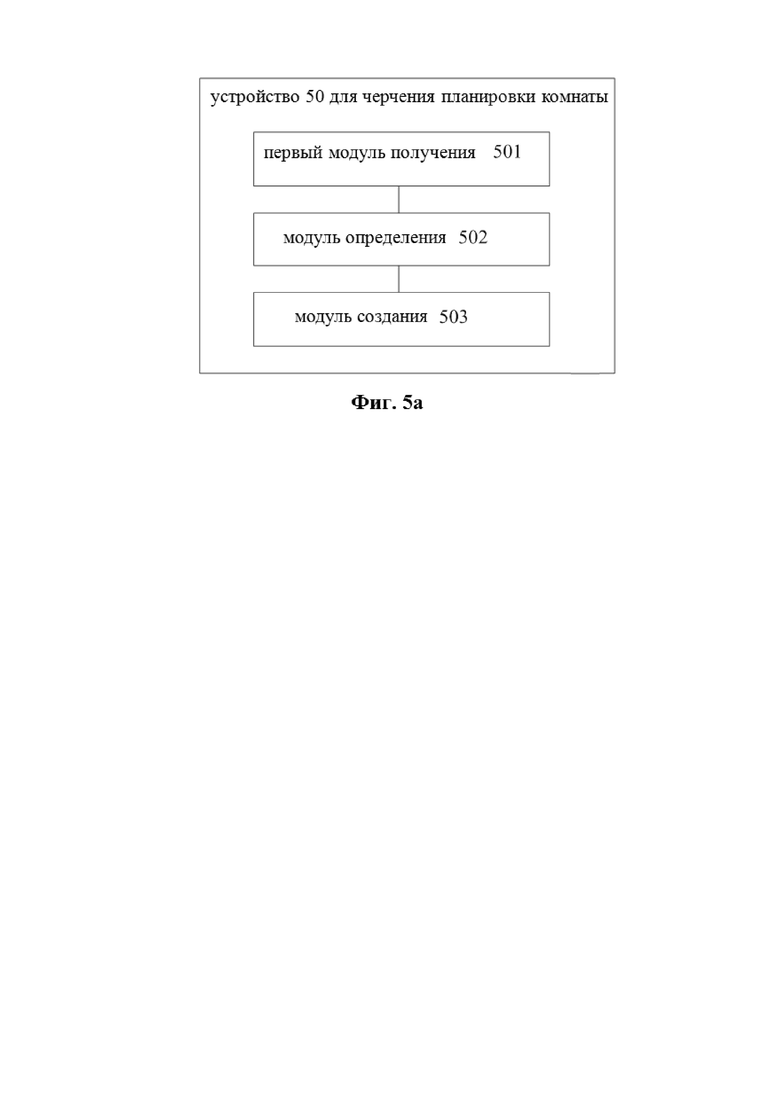
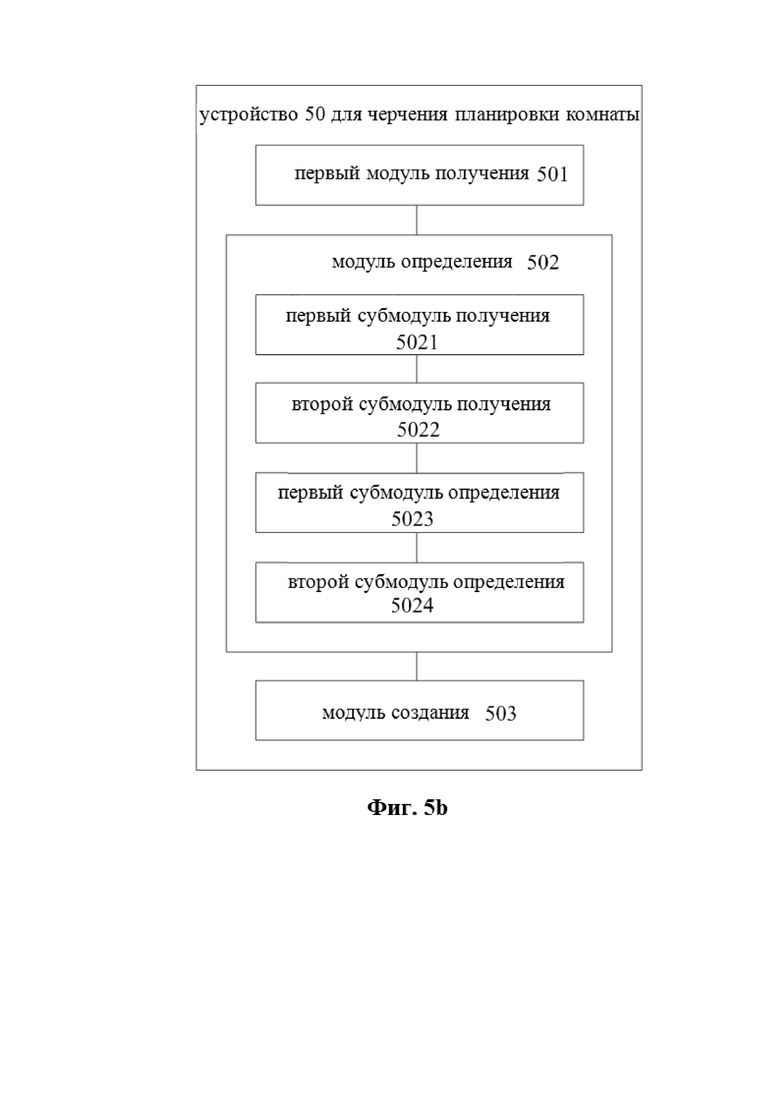
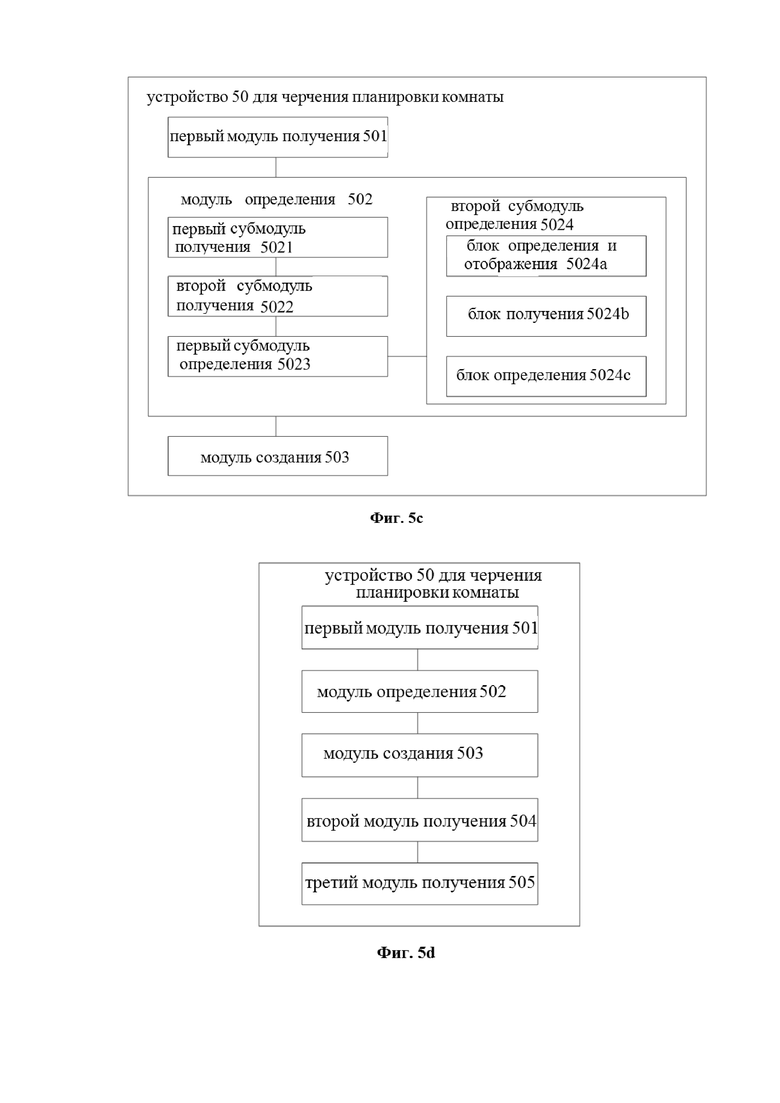
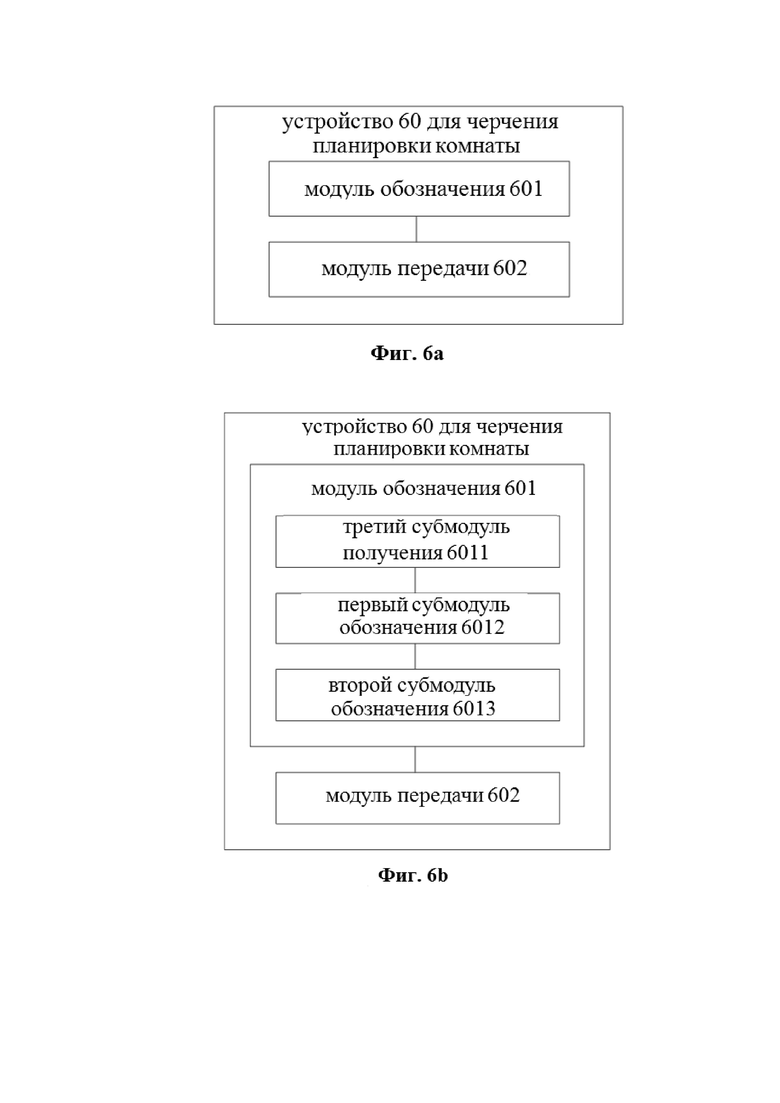
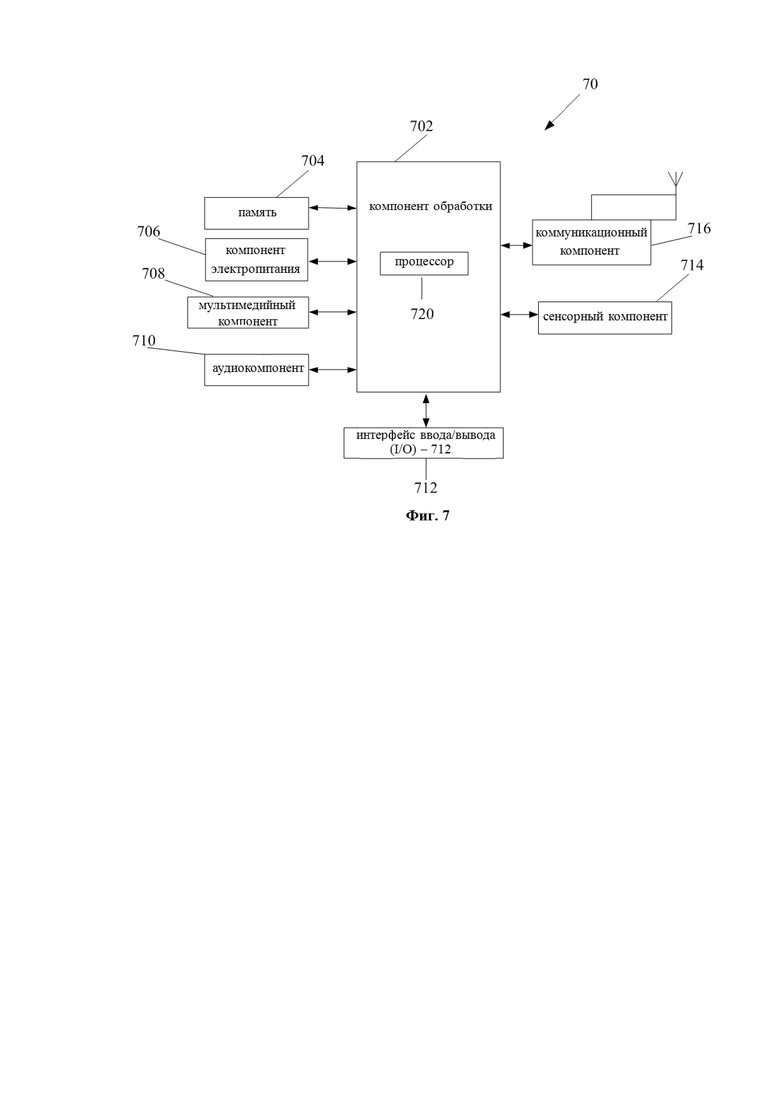
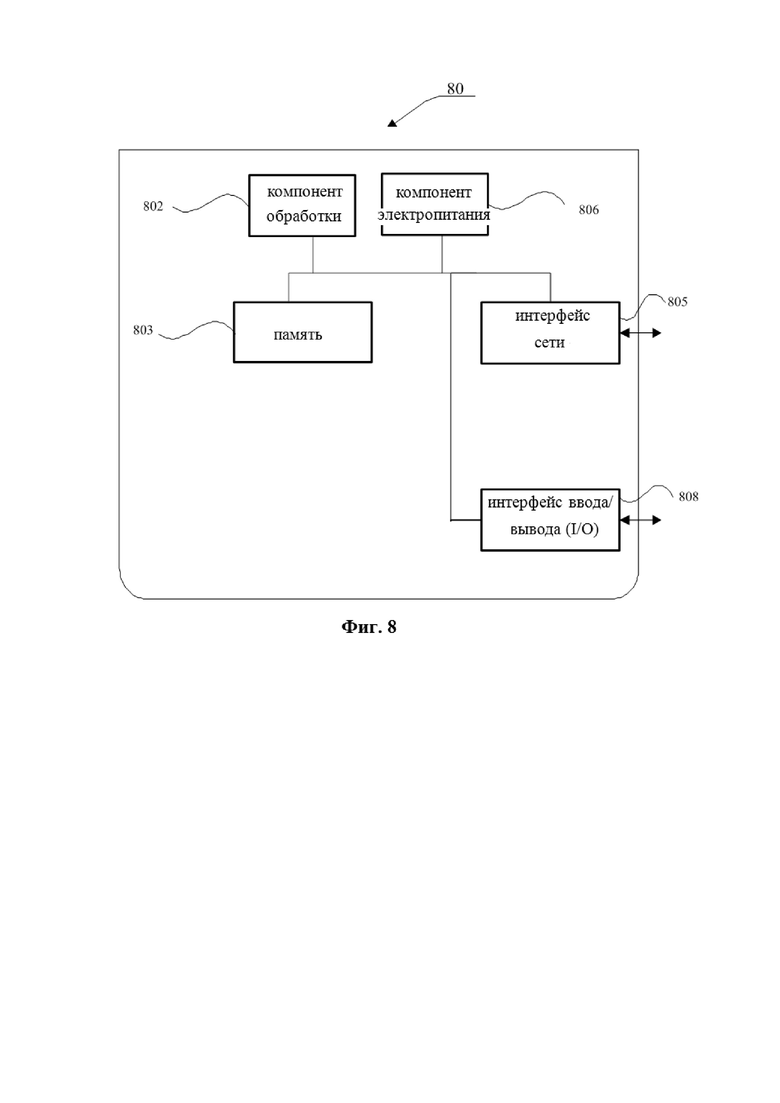
Группа изобретений относится к созданию планировки комнаты. Способ черчения планировки комнаты заключается в следующем. Получают граф пути подметания робота-подметателя, причем граф пути подметания содержит положения N первых препятствий и контуров, и положения М вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты. Причем нижняя область каждого из N первых препятствий меньше или равна первому заданному пороговому значению, а нижняя область каждого из М вторых препятствий больше или равна второму заданному пороговому значению, где N и М представляют собой целые числа, которые больше или равны 0. Определят Q предметов мебели, расположенных в комнате, в соответствии с положениями N первых препятствий и контуров, и положениями М вторых препятствий, где Q представляет собой целое число, которое больше или равно 0, и меньше или равно (N+М). Обозначают Q предметов мебели на плане комнаты для создания планировки комнаты. Также заявлены вариант способа черчения комнаты, в котором граф пути подметания передают на терминал для создания планировки комнаты, устройства для черчения комнаты и машиночитаемые носители данных. Технический результат заключается в повышении удобств и точности черчения планировки комнаты. 8 н. и 12 з.п. ф-лы, 16 ил.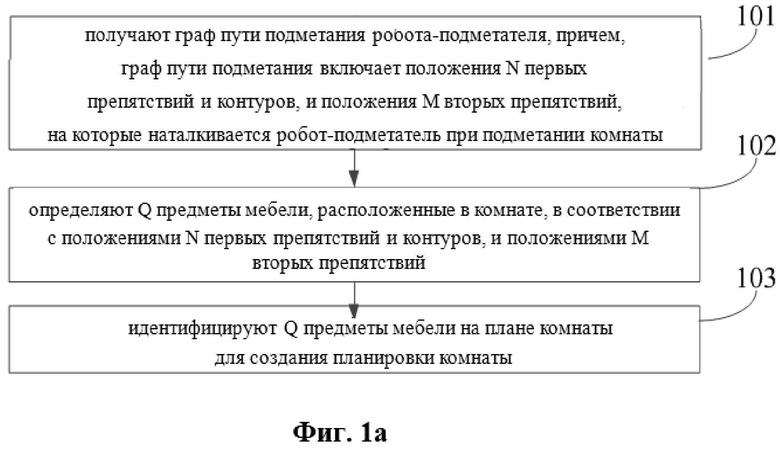
1. Способ черчения планировки комнаты, содержащий:
получение графа пути подметания робота-подметателя, причем граф пути подметания содержит положения N первых препятствий и контуров, и положения М вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, причем нижняя область каждого из N первых препятствий - меньше или равна первому заданному пороговому значению, а нижняя область каждого из М вторых препятствий - больше или равна второму заданному пороговому значению, где N и М представляют собой целые числа, которые - больше или равны 0;
определение Q предметов мебели, расположенных в комнате, в соответствии с положениями N первых препятствий и контуров, и положениями М вторых препятствий, где Q представляет собой целое число, которое - больше или равно 0, и меньше или равно (N+М); и
обозначение Q предметов мебели на плане комнаты для создания планировки комнаты.
2. Способ по п. 1, отличающийся тем, что первое заданное пороговое значение - меньше второго заданного порогового значения.
3. Способ по п. 2, отличающийся тем, что определение Q предметов мебели, расположенных в комнате, в соответствии с положениями N первых препятствий и контуров, и положениями М вторых препятствий, содержит:
получение расстояния между каждым из N первых препятствий в пределах заданного расстояния, в соответствии с положениями N первых препятствий;
получение размеров S замкнутых геометрий, сформированных N первыми препятствиями, в соответствии с расстояниями между каждым из N первых препятствий в пределах заданного расстояния;
определение размеров М объектов, представленных М вторыми препятствиями, в соответствии с контурами и положениями М вторых препятствий, и размером комнаты; и
определение Q предметов мебели, расположенных в комнате, в соответствии с размерами S замкнутых геометрий, размерами М объектов и базой данных заданного размера мебели.
4. Способ по п. 3, отличающийся тем, что определение Q предметов мебели, расположенных в комнате, в соответствии с размерами S замкнутых геометрий, размерами М объектов и базой данных заданного размера мебели, содержит:
определение и отображение множества вариантов для каждого предмета мебели, расположенного в комнате, в соответствии с размерами S замкнутых геометрий, размерами М объектов и базой данных заданного размера мебели;
получение команды выбора операции, причем, команда выбора операции содержит конкретный вариант каждого предмета мебели, определенный из множества вариантов каждого предмета мебели; и
определение Q предметов мебели, расположенных в комнате, в соответствии с конкретным вариантом каждого предмета мебели.
5. Способ по п. 1 или 2, дополнительно содержащий:
получение изображения панорамной сцены комнаты; и
черчение Q предметов мебели, расположенных в комнате, на изображении панорамной сцены для получения панорамной планировки комнаты.
6. Способ черчения планировки комнаты, содержащий:
обозначение положений N первых препятствий и контуров, и положений М вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, на графе пути подметания, причем, нижняя область каждого из N первых препятствий - меньше или равна первому заданному пороговому значению, а нижняя область каждого из М вторых препятствий - больше или равна второму заданному пороговому значению, где N и М представляют собой целые числа, которые - больше или равны 0; и
передачу графа пути подметания, обозначенного положениями N первых препятствий и контуров, и положениями М вторых препятствий, на терминал для создания планировки комнаты.
7. Способ по п. 6, отличающийся тем, что первое заданное пороговое значение - меньше второго заданного порогового значения.
8. Способ по п. 6 или 7, отличающийся тем, что обозначение положений N первых препятствий и контуров, и положений М вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, на графе пути подметания содержит:
когда количество наталкиваний на контрольное препятствие при подметании комнаты - больше или равно заданному количеству наталкиваний, получение нижней области контрольного препятствия;
когда нижняя область контрольного препятствия - меньше или равна первому заданному пороговому значению, обозначение контрольного препятствия в качестве одного из N первых препятствий на графе пути подметания, в соответствии с положением контрольного препятствия; и
когда нижняя область контрольного препятствия - больше или равна второму заданному пороговому значению, обозначение контрольного препятствия в качестве одного из М вторых препятствий на графе пути подметания, в соответствии с контуром контрольного препятствия и положением контрольного препятствия.
9. Устройство для черчения планировки комнаты, содержащее:
первый модуль получения, выполненный с возможностью получения графа пути подметания робота-подметателя, причем граф пути подметания содержит положения N первых препятствий и контуров, и положения М вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, причем, нижняя область каждого из N первых препятствий - меньше или равна первому заданному пороговому значению, а нижняя область каждого из М вторых препятствий - больше или равна второму заданному пороговому значению, где N и М представляют собой целые числа, которые - больше или равны 0;
модуль определения, выполненный с возможностью определения Q предметов мебели, расположенных в комнате, в соответствии с положениями N первых препятствий и контуров, и положениями М вторых препятствий, где Q представляет собой целое число, которое - больше или равно 0, и меньше или равно (N+М); и
модуль создания, выполненный с возможностью обозначения Q предметов мебели на плане комнаты для создания планировки комнаты.
10. Устройство по п. 9, отличающееся тем, что первое заданное пороговое значение - меньше второго заданного порогового значения.
11. Устройство по п. 10, отличающееся тем, что модуль определения содержит:
первый субмодуль получения, выполненный с возможностью получения расстояния между каждым из N первых препятствий в пределах заданного расстояния, в соответствии с положениями N первых препятствий;
второй субмодуль получения, выполненный с возможностью получения размеров S замкнутых геометрий, сформированных N первыми препятствиями, в соответствии с расстояниями между каждым из N первых препятствий в пределах заданного расстояния;
первый субмодуль определения, выполненный с возможностью определения размеров М объектов, представленных М вторыми препятствиями, в соответствии с контурами и положениями М вторых препятствий, и размером комнаты; и
второй субмодуль определения, выполненный с возможностью определения Q предметов мебели, расположенных в комнате, в соответствии с размерами S замкнутых геометрий, размерами М объектов и базой данных заданного размера мебели.
12. Устройство по п. 11, отличающееся тем, что второй субмодуль определения содержит:
определение и отображение блока, выполненного с возможностью определения и отображения множества вариантов для каждого предмета мебели, расположенного в комнате, в соответствии с размерами S замкнутых геометрий, размерами М объектов и базой данных заданного размера мебели;
получение блока, выполненного с возможностью получения команды выбора операции, причем, команда выбора операции содержит конкретный вариант каждого предмета мебели, определенный из множества вариантов каждого предмета мебели; и
блок определения, выполненный с возможностью определения Q предметов мебели, расположенных в комнате, в соответствии с конкретным вариантом каждого предмета мебели.
13. Устройство по п. 9 или 10, дополнительно содержащее:
второй модуль получения, выполненный с возможностью получения изображения панорамной сцены комнаты; и
третий модуль получения, выполненный с возможностью черчения Q предметов мебели, расположенных в комнате, на изображении панорамной сцены для получения панорамной планировки комнаты.
14. Устройство для черчения планировки комнаты, содержащее:
модуль обозначения, выполненный с возможностью обозначения положений N первых препятствий и контуров, и положений М вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, на графе пути подметания, причем, нижняя область каждого из N первых препятствий - меньше или равна первому заданному пороговому значению, а нижняя область каждого из М вторых препятствий - больше или равна второму заданному пороговому значению, где N и М представляют собой целые числа, которые - больше или равны 0; и
модуль передачи, выполненный с возможностью передачи графа пути подметания, обозначенного положениями N первых препятствий и контуров, и положениями М вторых препятствий, на терминал для создания планировки комнаты.
15. Устройство по п. 14, отличающееся тем, что первое заданное пороговое значение - меньше второго заданного порогового значения.
16. Устройство по п. 14 или 15, отличающееся тем, что модуль обозначения содержит:
третий субмодуль получения, выполненный с возможностью получения нижней области контрольного препятствия, когда количество наталкиваний на контрольное препятствие при подметании комнаты - больше или равно заданному количеству наталкиваний;
первый субмодуль определения, выполненный с возможностью обозначения контрольного препятствия в качестве одного из N первых препятствий на графе пути подметания, в соответствии с положением контрольного препятствия, когда нижняя область контрольного препятствия - меньше или равна первому заданному пороговому значению; и
второй субмодуль обозначения, выполненный с возможностью обозначения контрольного препятствия в качестве одного из М вторых препятствий на графе пути подметания, в соответствии с контуром контрольного препятствия и положением контрольного препятствия, когда нижняя область контрольного препятствия - больше или равна второму заданному пороговому значению.
17. Устройство для черчения планировки комнаты, содержащее:
первый процессор;
первую память, выполненную с возможностью хранения команд, выполняемых первым процессором;
отличающееся тем, что процессор выполнен с возможностью: получения графа пути подметания робота-подметателя, причем, граф пути подметания содержит положения N первых препятствий и контуров, и положения М вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, причем, нижняя область каждого из N первых препятствий - меньше или равна первому заданному пороговому значению, а нижняя область каждого из М вторых препятствий - больше или равна второму заданному пороговому значению, где N и М представляют собой целые числа, которые - больше или равны 0;
определения Q предметов мебели, расположенных в комнате, в соответствии с положениями N первых препятствий и контуров, и положениями М вторых препятствий, где Q представляет собой целое число, которое - больше или равно 0, и меньше или равно (N+М); и
обозначения Q предметов мебели на плане комнаты для создания планировки комнаты.
18. Устройство для черчения планировки комнаты, содержащее:
второй процессор;
вторую память, выполненную с возможностью хранения команд, выполняемых вторым процессором;
отличающееся тем, что второй процессор выполнен с возможностью:
обозначения положений N первых препятствий и контуров, и положений М вторых препятствий, на которые наталкивается робот-подметатель при подметании комнаты, на графе пути подметания, причем, нижняя область каждого из N первых препятствий - меньше или равна первому заданному пороговому значению, а нижняя область каждого из М вторых препятствий - больше или равна второму заданному пороговому значению, где N и М представляют собой целые числа, которые - больше или равны 0; и
передачи графа пути подметания, обозначенного положениями N первых препятствий и контуров, и положениями М вторых препятствий, на терминал для создания планировки комнаты.
19. Машиночитаемый носитель данных, выполненный с возможностью хранения компьютерных команд, которые, после выполнения процессором, реализуют способ по любому из пп. 1-5.
20. Машиночитаемый носитель данных, выполненный с возможностью хранения компьютерных команд, которые, после выполнения процессором, реализуют способ по любому из пп. 6-8.
| US 2009226113 A1, 10.09.2009 | |||
| CN 105511478 A, 20.04.2016 | |||
| US 2006095170 A1, 04.05.2006 | |||
| CN 106564054 A, 19.04.2017 | |||
| Автоматическое устройство для перелива излишков жидкости из вакуум-патронов разливных машин АШ-2 | 1960 |
|
SU139571A1 |

