ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[001] Настоящая заявка на изобретение претендует на приоритет на основании Патентной заявки Китая № 201710278733.5, поданной в Государственное ведомство по интеллектуальной собственности Китайской Народной Республики 25 апреля 2017 года, содержание которой включено в настоящий документ посредством ссылки в полном объеме.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[002] Настоящее изобретение относится к области технологии умного дома и, в частности, к способу зарядки и зарядному устройству робота-уборщика.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[003] С развитием науки и техники появляется все больше и больше электрических устройств, таких как, роботы. Появилась тенденция использовать роботов для выполнения домашней работы вместо человека. Например, робот-уборщик может помогать людям убирать комнату. Робот-уборщик может автоматически перемещаться и всасывать пыль с пола без каких-либо действий со стороны пользователя.
[004] Когда робот-уборщик начинает работать, то можно поставить задачу уборки. Когда задача уборки выполнена, или когда количество электричества – меньше заданного значения, то робот вернется к зарядному порту для зарядки.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[005] Варианты осуществления настоящего изобретения предлагают способ зарядки и зарядное устройство робота-уборщика. Технические решения могут быть следующими.
[006] В соответствии с первым аспектом вариантов осуществления настоящего изобретения, предлагается способ зарядки робота-уборщика. Способ применяется к роботу-уборщику и включает:
[007] получение информации о положении зарядных портов, подходящих для робота-уборщика;
[008] при определении того факта, что роботу-уборщику нужна зарядка, получение информации о текущем положении робота-уборщика;
[009] определение зарядного порта, который находится ближе всего к текущему положению робота-уборщика, в качестве ближайшего зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика; и
[0010] контролирование перемещения робота-уборщика к ближайшему зарядному порту для зарядки, в соответствии с информацией о положении ближайшего зарядного порта.
[0011] Техническое решение, предложенное в одном варианте осуществления настоящего изобретения, может иметь следующие преимущества. С помощью способа в соответствии с одним вариантом осуществления настоящего изобретения, когда определяется тот факт, что роботу-уборщику нужна зарядка, контролируется перемещение робота-уборщика к зарядному порту, который находится ближе всего к текущему положению робота-уборщика, для зарядки, благодаря чему роботу-уборщику не придется проходить слишком длинное расстояние, и робот-уборщик вынужден будет заряжаться поблизости, в результате чего экономится потребление электроэнергии роботом-уборщиком.
[0012] В одном варианте осуществления настоящего изобретения, способ дополнительно включает:
[0013] когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать, учет ближайшего зарядного порта в качестве начальной точки и определение первого маршрута уборки, соответственно;
[0014] контролирование работы робота-уборщика по первому маршруту уборки.
[0015] Техническое решение, предложенное в одном варианте осуществления настоящего изобретения, может иметь следующие преимущества. С помощью способа в соответствии с одним вариантом осуществления настоящего изобретения, когда робот-уборщик завершает зарядку в ближайшем зарядном порте и начинает работать, ближайший зарядный порт учитывается в качестве начальной точки для определения первого маршрута уборки. Затем робот-уборщик работает по первому маршруту уборки. Поскольку маршрут уборки, отличающийся от предыдущего маршрута, учтен в соответствии с зарядным портом, где заряжается робот-уборщик, то эффективность уборки повышается.
[0016] В одном варианте осуществления настоящего изобретения, определение того факта, что роботу-уборщику нужна зарядка, включает:
[0017] определение того факта, что роботу-уборщику нужна зарядка, когда оставшиеся количество электричества робота-уборщика – меньше заданного значения.
[0018] Техническое решение, предложенное в одном варианте осуществления настоящего изобретения, может иметь следующие преимущества. С помощью способа в соответствии с одним вариантом осуществления настоящего изобретения, когда оставшееся количество электричества робота-уборщика – меньше заданного значения, определяется тот факт, что роботу-уборщику нужна зарядка, обеспечивая, тем самым, достаточное количество электричества у робота-уборщика для того, чтобы он мог автоматически обратно переместиться к зарядному порту для зарядки, и чтобы операция уборки могла выполняться плавно.
[0019] В одном варианте осуществления настоящего изобретения, способ дополнительно включает:
[0020] когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать, учет ближайшего зарядного порта в качестве начальной точки для зарядки, определение области, где робот-уборщик не проводил уборку, в качестве области, подлежащей уборке, и определение второго маршрута уборки, соответственно;
[0021] контролирование того факта, что робот-уборщик работает по второму маршруту уборки для проведения уборки области, подлежащей уборке.
[0022] Техническое решение, предложенное в одном варианте осуществления настоящего изобретения, может иметь следующие преимущества. С помощью способа в соответствии с одним вариантом осуществления настоящего изобретения, когда робот-уборщик завершает зарядку в ближайшем зарядном порте и начинает работать, если имеется какая-либо неубранная область, то ближайший зарядный порт учитывается в качестве начальной точки, область, которую робот-уборщик не убрал, определяется в качестве области, подлежащей уборке, и определяется второй маршрут уборки, соответственно. Затем контролируется уборка робота-уборщика по второму маршруту уборки, вместо непрерывной уборки по предыдущему маршрут от последнего положения, где процесс уборки прервался, повышая, таким образом, эффективность уборки робота-уборщика.
[0023] В одном варианте осуществления настоящего изобретения, определение того факта, что роботу-уборщику нужна зарядка, включает:
[0024] определение того факта, что роботу-уборщику нужна зарядка, когда робот-уборщик завершает задачу уборки.
[0025] Техническое решение, предложенное в одном варианте осуществления настоящего изобретения, может иметь следующие преимущества. С помощью способа в соответствии с одним вариантом осуществления настоящего изобретения, когда робот-уборщик завершает уборку, определяется тот факт, что роботу-уборщику нужна зарядка, и можно контролировать перемещение робота-уборщика к ближайшему зарядному порту для зарядки, чтобы подготовиться к следующей задаче, что, таким образом, позволяет избежать отрицательного воздействия на эффективность уборки, вызванного недостаточным электроснабжением при выполнении следующей задачи.
[0026] В одном варианте осуществления настоящего изобретения, определение зарядного порта, который находится ближе всего к текущему положению робота-уборщика, в качестве ближайшего зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика, включает:
[0027] вычисление пути уборки по текущему маршруту уборки от робота-уборщика до каждого зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика;
[0028] определение зарядного порта, соответствующего кратчайшему пути уборки в качестве зарядного порта, который находится ближе всего к текущему положению робота-уборщика.
[0029] Техническое решение, предложенное в одном варианте осуществления настоящего изобретения, может иметь следующие преимущества. С помощью способа в соответствии с одним вариантом осуществления настоящего изобретения, вычисляется путь уборки по текущему маршруту уборки от робота-уборщика до каждого зарядного порта, и определяется зарядный порт, соответствующий кратчайшему пути уборки, в качестве зарядного порта, который находится ближе всего к текущему положению робота-уборщика. Таким образом, робот-уборщик может продолжать убираться, перемещаясь к ближайшему зарядному порту для зарядки, повышая, таким образом, эффективность уборки.
[0030] В соответствии с первым аспектом вариантов осуществления настоящего изобретения, предлагается зарядное устройство робота-уборщика. Устройство применяется к роботу-уборщику и включает:
[0031] первый модуль получения, выполненный с возможностью получения информации о положении зарядных портов, подходящих для робота-уборщика;
[0032] второй модуль получения, выполненный с возможностью получения информации о текущем положении робота-уборщика при определении того факта, что роботу-уборщику нужна зарядка;
[0033] первый модуль определения, выполненный с возможностью определения зарядного порта, который находится ближе всего к текущему положению робота-уборщика, в качестве ближайшего зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика;
[0034] первый модуль контроля, выполненный с возможностью контролирования перемещения робота-уборщика к ближайшему зарядному порту для зарядки, в соответствии с информацией о положении ближайшего зарядного порта.
[0035] В одном варианте осуществления настоящего изобретения, устройство дополнительно включает:
[0036] второй модуль определения, выполненный с возможностью учета ближайшего зарядного порта в качестве начальной точки и определения первого маршрута уборки, соответственно, когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать;
[0037] второй модуль контроля, выполненный с возможностью контроля работы робота-уборщика по первому маршруту уборки.
[0038] В одном варианте осуществления настоящего изобретения, второй модуль получения включает:
[0039] первый субмодуль определения, выполненный с возможностью определения того факта, что роботу-уборщику нужна зарядка, когда оставшиеся количество электричества робота-уборщика – меньше заданного значения.
[0040] В одном варианте осуществления настоящего изобретения, устройство дополнительно включает:
[0041] третий модуль определения, выполненный с возможностью учета ближайшего зарядного порта в качестве начальной точки, определения области, где робот-уборщик не проводил уборку, в качестве области, подлежащей уборке, и определения второго маршрута уборки, соответственно, когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать;
[0042] третий модуль контроля, выполненный с возможностью контролирования того факта, что робот-уборщик работает по второму маршруту уборки для проведения уборки области, подлежащей уборке.
[0043] В одном варианте осуществления настоящего изобретения, второй модуль получения включает:
[0044] второй субмодуль определения, выполненный с возможностью определения того факта, что роботу-уборщику нужна зарядка, когда робот-уборщик завершает задачу уборки.
[0045] В одном варианте осуществления настоящего изобретения, первый модуль определения включает:
[0046] субмодуль вычисления, выполненный с возможностью вычисления пути уборки по текущему маршруту уборки от робота-уборщика до каждого зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика;
[0047] третий субмодуль определения, выполненный с возможностью определения зарядного порта, соответствующего кратчайшему пути уборки в качестве зарядного порта, который находится ближе всего к текущему положению робота-уборщика.
[0048] В соответствии с третьим аспектом вариантов осуществления настоящего изобретения, предлагается зарядное устройство робота-уборщика. Устройство может применяется к роботу-уборщику, и оно включает:
[0049] процессор;
[0050] память для хранения команд, выполняемых процессором;
[0051] при этом, процессор выполнен с возможностью выполнения следующий действий:
[0052] получения информации о положении зарядных портов, подходящих для робота-уборщика;
[0053] при определении того факта, что роботу-уборщику нужна зарядка, получения информации о текущем положении робота-уборщика;
[0054] определения зарядного порта, который находится ближе всего к текущему положению робота-уборщика, в качестве ближайшего зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика; и
[0055] контролирования перемещения робота-уборщика к ближайшему зарядному порту для зарядки, в соответствии с информацией о положении ближайшего зарядного порта.
[0056] В соответствии с четвертым аспектом вариантов осуществления настоящего изобретения, предлагается машиночитаемый носитель данных, хранящийся с компьютерными программами, применяемыми к роботу-уборщику, и при выполнении процессором, заставляет процессор выполнять действия вышеупомянутого способа зарядки робота-уборщика.
[0057] Следует понимать, что и приведенное выше общее описание, и последующее подробное описание являются примерными и пояснительными, и они не ограничивают настоящее изобретение, в том виде, в котором оно заявлено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0058] Сопроводительные чертежи, которые включены и составляют часть настоящего описания, показывают варианты осуществления по настоящему изобретению, и, вместе с описанием, предназначены для объяснения принципов настоящего изобретения.
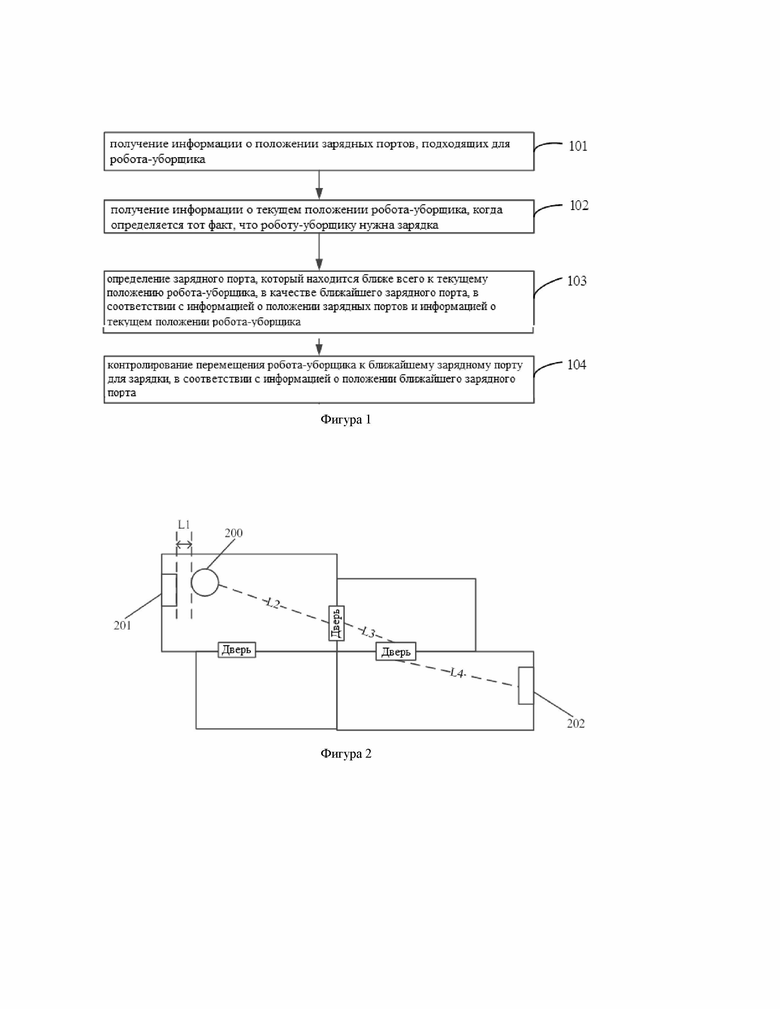
[0059] Фигура 1 представляет собой блок-схему, показывающую способ зарядки робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения.
[0060] Фигура 2 представляет собой схему, показывающую сценарий применения зарядки робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения.
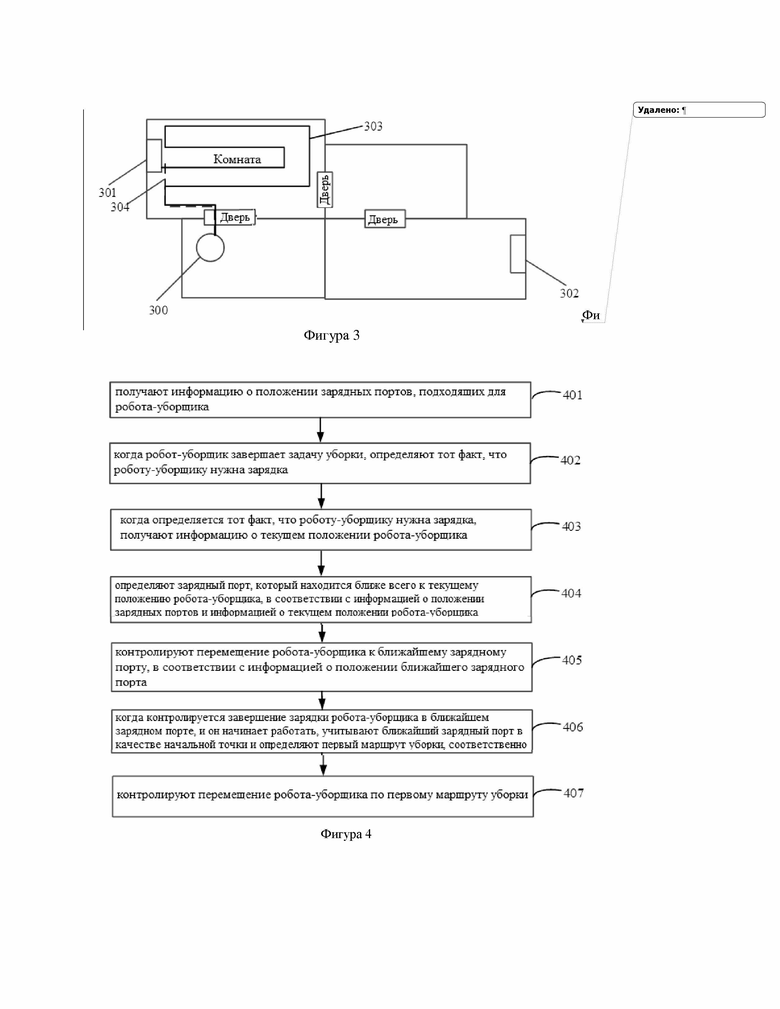
[0061] Фигура 3 представляет собой схему, показывающую другой сценарий применения зарядки робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения.
[0062] Фигура 4 представляет собой блок-схему, показывающую способ зарядки робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения.
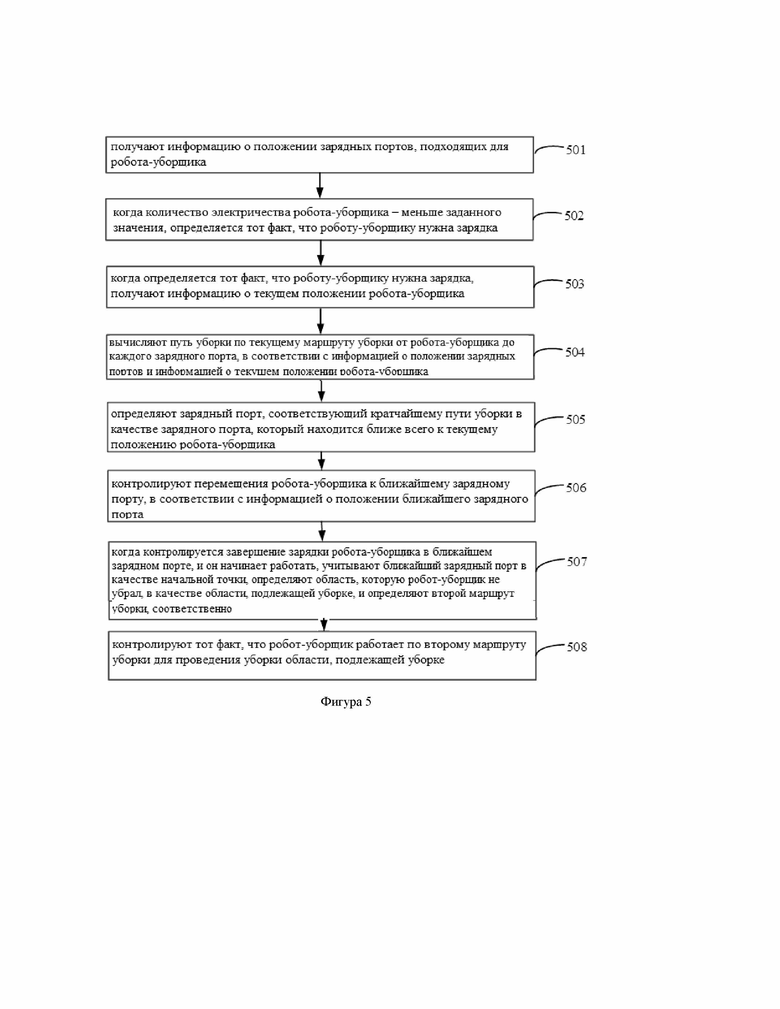
[0063] Фигура 5 представляет собой блок-схему, показывающую способ зарядки робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения.
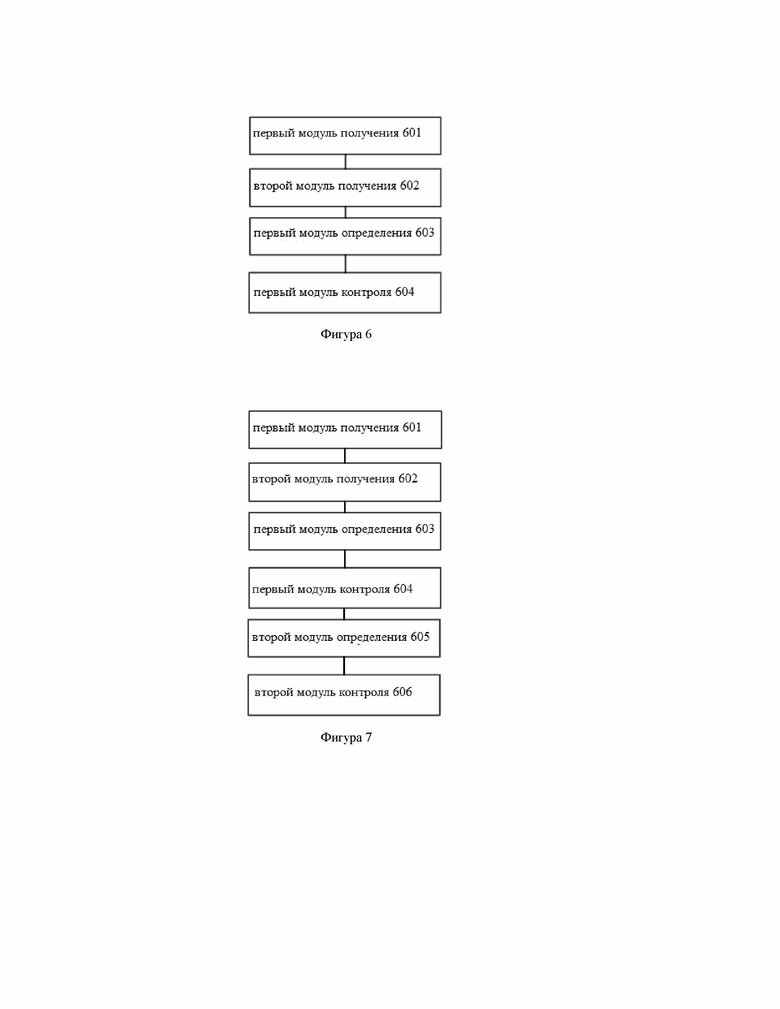
[0064] Фигура 6 представляет собой блок-диаграмму, показывающую зарядное устройство робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения.
[0065] Фигура 7 представляет собой блок-диаграмму, показывающую зарядное устройство робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения.
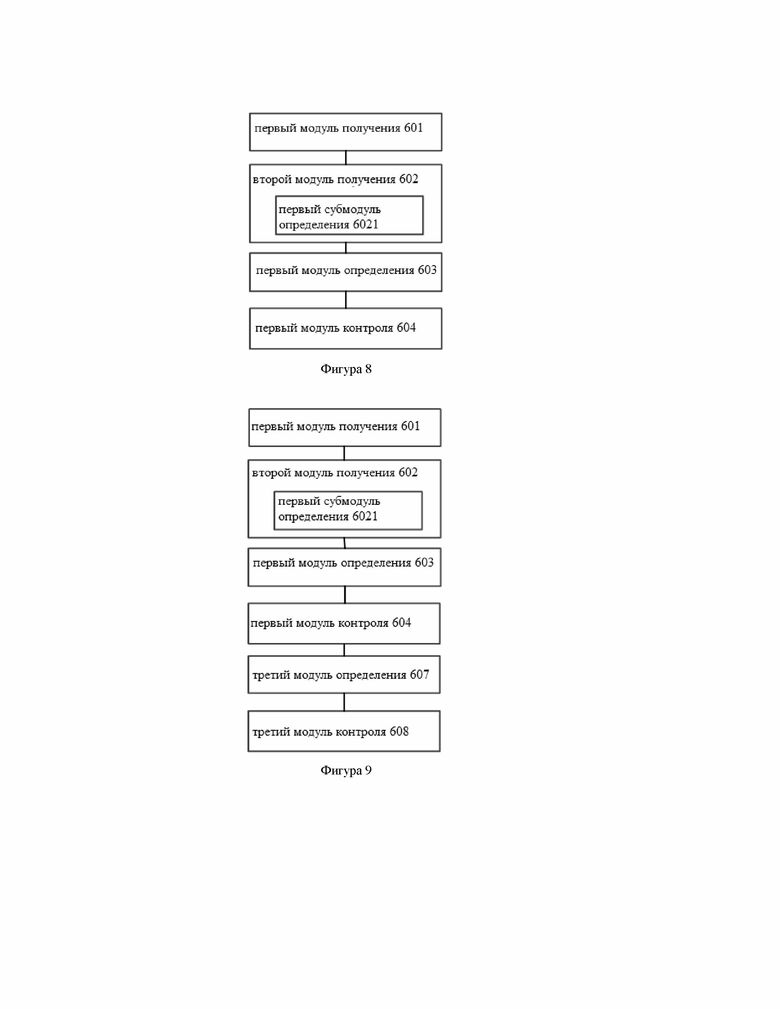
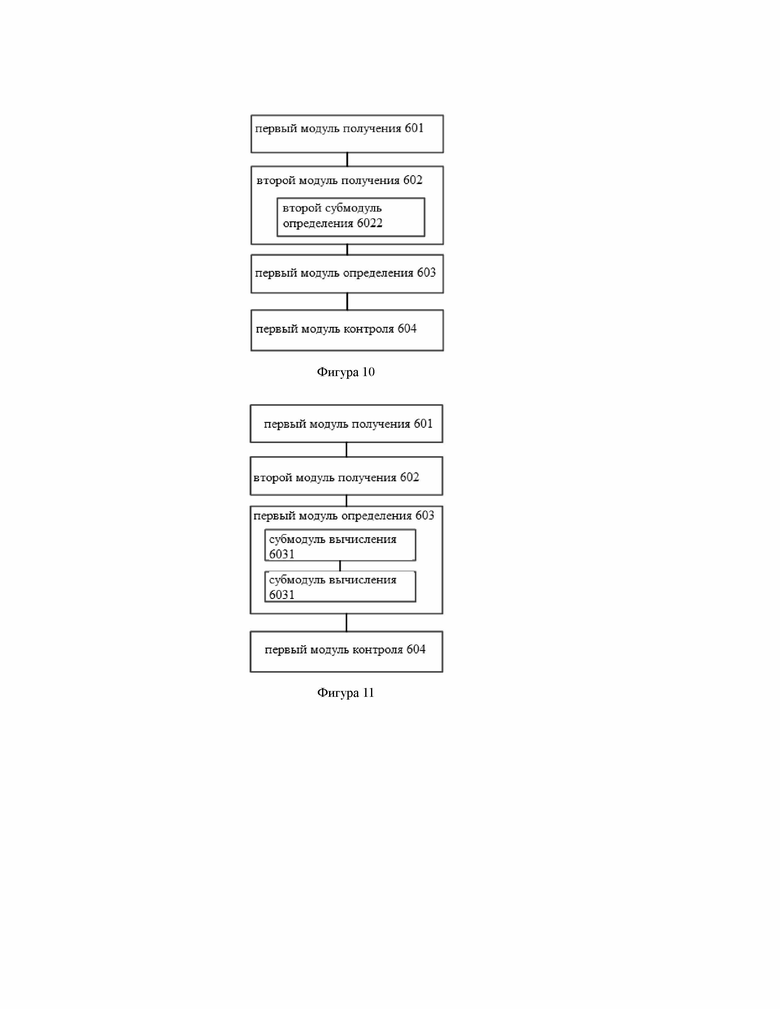
[0066] Фигура 8 представляет собой блок-диаграмму, показывающую зарядное устройство робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения.
[0067] Фигура 9 представляет собой блок-диаграмму, показывающую зарядное устройство робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения.
[0068] Фигура 10 представляет собой блок-диаграмму, показывающую зарядное устройство робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения.
[0069] Фигура 11 представляет собой блок-диаграмму, показывающую зарядное устройство робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения.
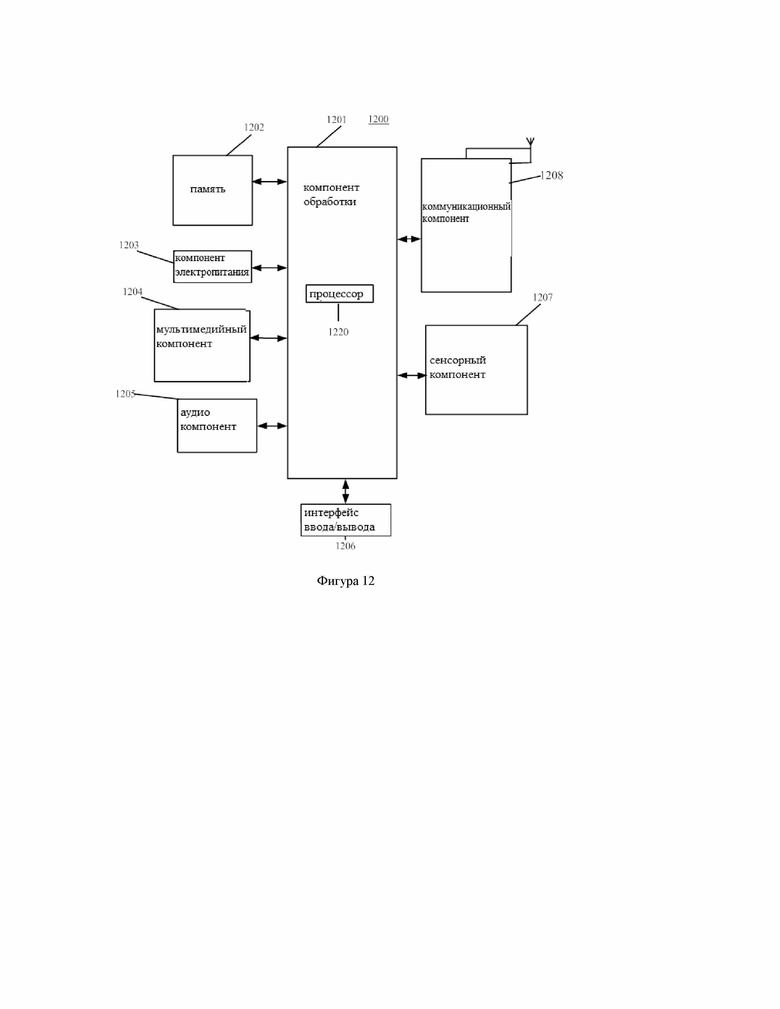
[0070] Фигура 12 представляет собой блок-диаграмму, показывающую зарядное устройство робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0071] Теперь будет приведена подробная ссылка на примерные варианты осуществления настоящего изобретения, примеры которого показаны на сопроводительных чертежах. Следующее описание относится к сопроводительным чертежам, при этом, одинаковые номера на различных чертежах представляют одинаковые или подобные элементы, если не указано иное. Варианты осуществления настоящего изобретения, изложенные в следующем описании примерных вариантов, не представляют все варианты осуществления настоящего изобретения. Напротив, они являются лишь примерами устройств и способов, в соответствии с аспектами, относящимися к настоящему изобретению, как указано в прилагаемой формуле изобретения.
[0072] Когда имеется множество зарядных столбиков в области уборки робота-уборщика, или когда робот-уборщик имеет множество штепсельных вилок, которые могут подходить для розеток нескольких видов (например, с тремя отверстиями, двумя отверстиями и так далее) и, таким образом, могут подходить для розеток множества гнезд, робот может иметь множество положений зарядки. Поэтому, в настоящее время имеется проблема, требующая решения: какое из положений зарядки использовать для зарядки робота.
[0073] Для решения вышеупомянутой проблемы, в настоящем варианте осуществления изобретения получают информацию о положении зарядных портов, подходящих для робота-уборщика. Когда определен тот факт, что роботу-уборщику нужна зарядка, получают информацию о текущем положении робота-уборщика. Определяют зарядный порт, который находится ближе всего к текущему положению робота-уборщика, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика. Перемещение робота-уборщика к ближайшему зарядному порту для зарядки контролируется, благодаря чему роботу-уборщику не придется проходить слишком длинное расстояние, и робот-уборщик вынужден будет заряжаться поблизости, в результате чего экономится потребление электроэнергии роботом-уборщиком.
[0074] Фигура 1 представляет собой блок-схему, показывающую способ зарядки робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения. Как показано на Фигуре 1, способ зарядки робота-уборщика может применяться в устройстве, таком как, робот-уборщик, и способ включает действия 101-104.
[0075] В блоке 101, получают информацию о положении зарядных портов, подходящих для робота-уборщика.
[0076] Если говорить подробнее, то положения зарядных портов могут устанавливаться пользователем, когда робот-уборщик получает карту области уборки. Или, между роботом-уборщиком и зарядными портами могут быть установлены информационные соединения, и положения зарядных портов могут быть получены посредством инфракрасного излучения, Bluetooth, ультразвука или радиосвязи. В данном варианте осуществления настоящего изобретении не присутствуют какие-либо ограничения.
[0077] В блоке 102, когда определяется тот факт, что роботу-уборщику нужна зарядка, получают информацию о текущем положении робота-уборщика.
[0078] Если говорить подробнее, то робот-уборщик может записывать свои положения на карте области уборки, таким образом, может быть получена информация о его текущем положении.
[0079] В блоке 103, зарядный порт, который находится ближе всего к текущему положению робота-уборщика, определяется в качестве ближайшего зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика.
[0080] Если говорить подробнее, то при определении зарядного порта, который находится ближе всего к роботу-уборщику, можно получить расстояние между роботом-уборщиком и каждым зарядным портам в качестве расстояния по прямой линии между роботом-уборщиком и каждым зарядным портом, или длину пути, на которую должен переместиться робот-уборщик от текущего положения к каждому зарядному порту путем перемещения по прямой. Кроме того, можно рассмотреть маршрут уборки робота-уборщика, путь от робота-уборщика к каждому зарядному порту может быть вычислен по маршруту уборки, и его длина используется в качестве расстояния между роботом-уборщиком и каждым зарядным портом. В данном варианте осуществления настоящего изобретении не присутствуют какие-либо ограничения.
[0081] В блоке 104, контролируется перемещение робота-уборщика к ближайшему зарядному порту, в соответствии с информацией о положении ближайшего зарядного порта.
[0082] Фигура 2 представляет собой схему, показывающую сценарий применения зарядки робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения.
[0083] В одном варианте осуществления настоящего изобретения, как показано на Фигуре 2, область комнаты, показанная на Фигуре 2, представляет собой рабочую область робота-уборщика 200, и внутри нее имеются зарядные порты 201 и 202. Когда робот-уборщик 200 входит в рабочую область, то сначала получают информацию о положении зарядного порта 201 и информацию о положении зарядного порта 202. Как показано на Фигуре 2, когда определяется тот факт, что роботу-уборщику 200 нужна зарядка в положении, показанном на Фигуре 2, робот-уборщик 200 может получить информацию о своем текущем положении. Информация о положении зарядных портов и информация о положении робота-уборщика может быть координатной информацией. В данном варианте осуществления настоящего изобретения, учитывая длину пути робота-уборщика, на которую ему нужно переместиться от текущего положения к каждому зарядному порту в виде перемещения по прямой, в качестве расстояния, способ определения зарядного порта, который находится ближе всего к текущему положению робота-уборщика, показан следующим образом. Расстояние между текущим положением робота-уборщика 200 и положением зарядного порта 201 вычисляют в соответствии с информацией о текущем положении робота-уборщика 200 и информацией о положении зарядного порта 201, которое обозначается как L1. Расстояние между текущим положением робота-уборщика 200 и положением зарядного порта 202 вычисляют в соответствии с информацией о текущем положении робота-уборщика 200 и информацией о положении зарядного порта 201, которое обозначается как L2+L3+L4. Когда L1 < L2 + L3 + L4, то зарядный порт 201, который находится ближе всего к текущему положению робота-уборщика 200, может быть выбран роботом-уборщиком 200, и контролируется перемещение робота-уборщика 200 по расстоянию L1 к зарядному порту 201 для зарядки. Благодаря сравнению контролирования перемещения робота-уборщика 200 по расстоянию L2 + L3 + L4 к зарядному порту 202 для зарядки, путем контролирования перемещения робота-уборщика 200 по расстоянию L1 к ближайшему зарядному порту 201 для зарядки, роботу-уборщику не придется проходить слишком длинное расстояние, и робот-уборщик вынужден будет заряжаться поблизости, в результате чего экономится потребление электроэнергии роботом-уборщиком.
[0084] В данном варианте осуществления настоящего изобретения, когда определяется тот факт, что роботу-уборщику нужна зарядка, контролируется перемещение робота-уборщика к зарядному порту, который находится ближе всего к текущему положению робота-уборщика, для зарядки, благодаря чему роботу-уборщику не придется проходить слишком длинное расстояние, и робот-уборщик вынужден будет заряжаться поблизости, в результате чего экономится потребление электроэнергии роботом-уборщиком.
[0085] В альтернативном варианте осуществления настоящего изобретения, способ зарядки робота-уборщика может дополнительно включать действия A1 и A2.
[0086] В действии A1, когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать, то ближайший зарядный порт учитывается в качестве начальной точки, и определяется первый маршрут уборки, соответственно.
[0087] В действии A2, контролируется работа робота-уборщика по первому маршруту уборки.
[0088] В одном варианте осуществления настоящего изобретения, как показано на Фигуре 2, робот-уборщик 200 изначально заряжается в зарядном порте 202 и затем начинает работать. Когда вся область убрана, робот-уборщик 200 расположен в положении, показанном на Фигуре 2. В данном варианте осуществления настоящего изобретения, зарядным портом, который находится ближе всего к текущему положению робота-уборщика 200, является зарядный порт 201. Когда робот-уборщик 200 завершает зарядку в ближайшем зарядном порте 201 и начинает следующую уборку, первый маршрут уборки робота-уборщика 200 может быть определен путем учета зарядного порта 201 в качестве начальной точки. Таким образом, робот-уборщик 200 может убирать по первому маршруту уборки вместо возвращения к предыдущему маршруту, соответствующему зарядному порту 202, повышая, таким образом, эффективности уборки.
[0089] В данном варианте осуществления настоящего изобретения, когда робот-уборщик завершает зарядку в ближайшем зарядном порте и начинает работать, ближайший зарядный порт учитывается в качестве начальной точки, и определяется первый маршрут уборки, соответственно. Затем робот-уборщик работает по первому маршруту уборки. Поскольку маршрут уборки, отличающийся от предыдущего маршрута, учтен в соответствии с зарядным портом, где заряжается робот-уборщик, то эффективность уборки повышается.
[0090] В альтернативном варианте осуществления настоящего изобретения, определение того факта, что роботу-уборщику нужна зарядка в блоке 102 в способе зарядки робота-уборщика, может выполняться как действие B1.
[0091] В действии B1, когда оставшиеся количество электричества робота-уборщика – меньше заданного значения, определяется то факт, что роботу-уборщику нужна зарядка.
[0092] В одном варианте осуществления настоящего изобретения, может быть определено, что роботу-уборщику нужна зарядка, когда оставшиеся количество электричества робота-уборщика – слишком мало, чтобы непрерывно поддерживать конкретную операцию уборки, но его достаточно, чтобы поддерживать перемещение к зарядному порту. В данном варианте осуществления настоящего изобретения, заданное значение может быть задано как количество электричества, которое может охватить самое высокое потребление электроэнергии робота-уборщика для перемещения от самого дальнего положения от зарядного порта к зарядному порту, когда робот-уборщик выполняет только операцию перемещения, для обеспечения того, чтобы оставшееся количество электричества робота-уборщика могло поддерживать его автоматическое обратное перемещение к зарядному порту для зарядки. Конечно, заданное значение также может быть задано как количество электричества, которое может охватить самое высокое потребление электроэнергии робота-уборщика для перемещения от самого дальнего положения от зарядного порта к зарядному порту, когда робот-уборщик выполняет также операцию уборки, для обеспечения того, чтобы оставшееся количество электричества робота-уборщика могло поддерживать его обратное перемещение к зарядному порту для зарядки, а также для выполнения операции уборки.
[0093] В данном варианте осуществления настоящего изобретения, когда количество электричества робота-уборщика – меньше заданного значения, определяется тот факт, что роботу-уборщику нужна зарядка, обеспечивая, тем самым, наличие достаточного количество электричества у робота-уборщика для того, чтобы он мог автоматически обратно переместиться к зарядному порту для зарядки, и чтобы операция уборки могла выполняться плавно.
[0094] В альтернативном варианте осуществления настоящего изобретения, способ зарядки робота-уборщика может дополнительно включать действия C1 и C2.
[0095] В действии C1, когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать, ближайший зарядный порт учитывается в качестве начальной точки, область, где робот-уборщик не проводил уборку, определяется в качестве области, подлежащей уборке, и второй маршрут уборки определяется, соответственно.
[0096] В действии C2, контролируется тот факт, что робот-уборщик работает по второму маршруту уборки для проведения уборки области, подлежащей уборке.
[0097] В одном варианте осуществления настоящего изобретения, Фигура 3 представляет собой схему, показывающую другой сценарий применения зарядки робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения. Как показано на Фигуре 3, когда робот-уборщик 300 выполняет задачу уборки и все же имеются некоторые области, например, комната 1, которые не убраны, количество электричества робота-уборщика 300 становится меньше заданного значения, и определяется тот факт, что роботу-уборщику 300 нужна зарядка. В данном случае, робот-уборщик 300 может выбрать зарядный порт 301, который находится ближе всего к его текущему положению, для зарядки, но не дальше зарядного порта 302, с тем, чтобы сэкономить потребление электроэнергии робота-уборщика 300. Когда робот-уборщик 300 завершит зарядку, он не вернется в положение на Фигуре 3 для продолжения уборки. Вместо этого, ближайший зарядный порт 301 учитывается в качестве начальной точки, область, которую робот-уборщик 300 не убрал, определяется в качестве области, подлежащей уборке, и второй маршрут уборки планируется повторно, соответственно. Затем контролируется работа робота-уборщика по второму маршруту уборки, повышая, таким образом, эффективность уборки робота-уборщика.
[0098] В данном варианте осуществления настоящего изобретения, когда робот-уборщик завершает зарядку в ближайшем зарядном порте и начинает работать, если имеется какая-либо неубранная область, то ближайший зарядный порт учитывается в качестве начальной точки, область, которую робот-уборщик не убрал, определяется в качестве области, подлежащей уборке, и определяется второй маршрут уборки, соответственно. Затем контролируется уборка робота-уборщика по второму маршруту уборки, вместо непрерывной уборки по предыдущему маршрут от последнего положения, где процесс уборки прерван, повышая, таким образом, эффективность уборки робота-уборщика.
[0099] В альтернативном варианте осуществления настоящего изобретения, определение того факта, что роботу-уборщику нужна зарядка в блоке 102 в способе зарядки робота-уборщика, может выполняться как действие D1.
[00100] В действии D1, когда робот-уборщик завершает задачу уборки, определяется тот факт, нужна ли роботу-уборщику зарядка.
[00101] В одном варианте осуществления настоящего изобретения, когда робот-уборщик завершает задачу уборки, и ему не нужно работать, робот-уборщик может переместиться к зарядному порту для зарядки и подготовиться к следующей задаче.
[00102] В данном варианте осуществления настоящего изобретения, когда робот-уборщик завершает уборку, определяется тот факт, что роботу-уборщику нужна зарядка, и можно контролировать перемещение робота-уборщика к ближайшему зарядному порту для зарядки, чтобы он мог подготовиться к следующей задаче, что, таким образом, позволяет избежать отрицательного воздействия на эффективность уборки, вызванного недостаточным электроснабжением при выполнении следующей задачи.
[00103] В альтернативном варианте осуществления настоящего изобретения, блок 103 в способе зарядки робота-уборщика может дополнительно включать действия E1 и E2.
[00104] В действии E1, вычисляется путь уборки по текущему маршруту уборки от робота-уборщика до каждого зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика.
[00105] В действии E2, определяется зарядный порт, соответствующий кратчайшему пути уборки, в качестве зарядного порта, который находится ближе всего к текущему положению робота-уборщика.
[00106] В одном варианте осуществления настоящего изобретения, возвращаясь снова к Фигуре 3, когда робот-уборщик 300 выполняет задачу уборки, и все же имеются некоторые области, например, комната 1, которые не убраны, количество электричества робота-уборщика 300 становится меньше заданного значения, и определяется тот факт, что роботу-уборщику 300 нужна зарядка. В данном случае, текущий маршрут очистки 303 робота-уборщика 300 может рассматриваться при выборе зарядного порта и использоваться для вычисления путей от робота-уборщика 300 до зарядных портов 301 и 302. Из Фигуры 3 можно увидеть, что путь прибытия робота-уборщика к зарядному порту 301 по текущему маршруту уборки представляет собой путь 304, который находится гораздо дальше, чем путь прибытия робота-уборщика к зарядному порту 302 по текущему маршруту уборки. Поэтому робот-уборщик 300 может выбрать ближайший зарядный порт, то есть, зарядный порт 301, для зарядки. Таким образом, робот-уборщик может продолжать убираться, перемещаясь по пути к зарядному порту 301, повышая, таким образом, эффективность уборки.
[00107] В данном варианте осуществления настоящего изобретения, вычисляется путь уборки по текущему маршруту уборки от робота-уборщика до каждого зарядного порта, и определяется зарядный порт, соответствующий кратчайшему пути уборки в качестве зарядного порта, который находится ближе всего к текущему положению робота-уборщика. Таким образом, робот-уборщик может продолжать убираться, перемещаясь к ближайшему зарядному порту для зарядки, повышая, таким образом, эффективность уборки.
[00108] Процесс будет подробно показан со ссылкой на некоторые варианты осуществления настоящего изобретения следующим образом.
[00109] Фигура 4 представляет собой блок-схему, показывающую способ зарядки робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения. Как показано на Фигуре 4, данный способ может быть осуществлен с помощью устройства, такого как, терминал, и способ включает действия 401-407.
[00110] В блоке 401, получают информацию о положении зарядных портов, подходящих для робота-уборщика.
[00111] В блоке 402, когда робот-уборщик завершает задачу уборки, определяется тот факт, что роботу-уборщику нужна зарядка.
[00112] В блоке 403, когда определяется тот факт, что роботу-уборщику нужна зарядка, получают информацию о текущем положении робота-уборщика.
[00113] В блоке 404, определяется зарядный порт, который находится ближе всего к текущему положению робота-уборщика, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика.
[00114] В блоке 405, контролируется перемещение робота-уборщика к ближайшему зарядному порту, в соответствии с информацией о положении ближайшего зарядного порта.
[00115] В блоке 406, когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать, ближайший зарядный порт учитывается в качестве начальной точки, и определяется первый маршрут уборки, соответственно.
[00116] В блоке 407, контролируется работа робота-уборщика по первому маршруту уборки.
[00117] Фигура 5 представляет собой блок-схему, показывающую способ зарядки робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения. Как показано на Фигуре 5, способ может быть осуществлен с помощью устройства, такого как, терминал, и способ включает действия 501-507.
[00118] В блоке 501, получают информацию о положении зарядных портов, подходящих для робота-уборщика.
[00119] В блоке 502, когда количество электричества робота-уборщика – меньше заданного значения, определяется тот факт, что роботу-уборщику нужна зарядка.
[00120] В блоке 503, когда определяется тот факт, что роботу-уборщику нужна зарядка, получают информацию о текущем положении робота-уборщика.
[00121] В блоке 504, вычисляется путь уборки по текущему маршруту уборки от робота-уборщика до каждого зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика.
[00122] В блоке 505, определяется зарядный порт, соответствующий кратчайшему пути уборки, в качестве зарядного порта, который находится ближе всего к текущему положению робота-уборщика.
[00123] В блоке 506, контролируется перемещение робота-уборщика к ближайшему зарядному порту, в соответствии с информацией о положении ближайшего зарядного порта.
[00124] В блоке 507, когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать, ближайший зарядный порт учитывается в качестве начальной точки, область, где робот-уборщик не проводил уборку, определяется в качестве области, подлежащей уборке, и второй маршрут уборки определяется, соответственно.
[00125] В блоке 508, контролируется тот факт, что робот-уборщик работает по второму маршруту уборки для проведения уборки области, подлежащей уборке.
[00126] Ниже приведены варианты осуществления устройства по настоящему изобретению, которое может использоваться для выполнения вариантов осуществления способа по настоящему изобретению.
[00127] Фигура 6 представляет собой блок-диаграмму, показывающую зарядное устройство робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения. Устройство может быть осуществлено с помощью программного обеспечения или аппаратного обеспечения, или их комбинации, и оно работает как часть или электронное устройство целиком. Как показано на Фигуре 6, зарядное устройство робота-уборщика может включать первый модуль получения 601, второй модуль получения 602, первый модуль определения 603 и первый модуль контроля 604.
[00128] Первый модуль получения 601 выполнен с возможностью получения информации о положении зарядных портов, подходящих для робота-уборщика.
[00129] Второй модуль получения 602 выполнен с возможностью получения информации о текущем положении робота-уборщика при определении того факта, что роботу-уборщику нужна зарядка.
[00130] Первый модуль определения 603 выполнен с возможностью определения зарядного порта, который находится ближе всего к текущему положению робота-уборщика, в качестве ближайшего зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика.
[00131] Первый модуль контроля 604 выполнен с возможностью контролирования перемещения робота-уборщика к ближайшему зарядному порту для зарядки, в соответствии с информацией о положении ближайшего зарядного порта.
[00132] В альтернативном варианте осуществления настоящего изобретения, вышеупомянутое зарядное устройство робота-уборщика может быть выполнено с дополнительной возможностью включения второго модуля определения 605 и второго модуля контроля 606. Фигура 7 представляет собой блок-диаграмму, показывающую данное зарядное устройство робота-уборщика.
[00133] Второй модуль определения 605 выполнен с возможностью учета ближайшего зарядного порта в качестве начальной точки и определения первого маршрута уборки, соответственно, когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать.
[00134] Второй модуль контроля 606 выполнен с возможностью контроля работы робота-уборщика по первому маршруту уборки.
[00135] В альтернативном варианте осуществления настоящего изобретения, второй модуль получения 602 вышеупомянутого зарядного устройства робота-уборщика может быть выполнен с дополнительной возможностью включения первого субмодуля определения 6021. Фигура 8 представляет собой блок-диаграмму, показывающую данное зарядное устройство робота-уборщика.
[00136] Первый субмодуль определения 6021 выполнен с возможностью определения того факта, что роботу-уборщику нужна зарядка, когда оставшиеся количество электричества робота-уборщика – меньше заданного значения.
[00137] В альтернативном варианте осуществления настоящего изобретения, вышеупомянутое зарядное устройство робота-уборщика может быть выполнено с дополнительной возможностью включения третьего модуля определения 607 и третьего модуля контроля 608. Фигура 9 представляет собой блок-диаграмму, показывающую данное зарядное устройство робота-уборщика.
[00138] Третий модуль определения 607 выполнен с возможностью учета ближайшего зарядного порта в качестве начальной точки, для определения области, где робот-уборщик не проводил уборку, в качестве области, подлежащей уборке, и определения второго маршрута уборки, соответственно, когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать.
[00139] Третий модуль контроля 608 выполнен с возможностью контролирования того факта, что робот-уборщик работает по второму маршруту уборки для проведения уборки области, подлежащей уборке.
[00140] В альтернативном варианте осуществления настоящего изобретения, второй модуль получения 602 вышеупомянутого зарядного устройства робота-уборщика может быть выполнен с дополнительной возможностью включения второго субмодуля определения 6022. Фигура 10 представляет собой блок-диаграмму, показывающую данное зарядное устройство робота-уборщика.
[00141] Второй субмодуль определения 6022 выполнен с возможностью определения того факта, что роботу-уборщику нужна зарядка, когда робот-уборщик завершает задачу уборки.
[00142] В альтернативном варианте осуществления настоящего изобретения, первый модуль определения 603 вышеупомянутого зарядного устройства робота-уборщика может быть выполнен с дополнительной возможностью включения субмодуля вычисления 6031 и третьего субмодуля определения 6032. Фигура 11 представляет собой блок-диаграмму, показывающую данное зарядное устройство робота-уборщика.
[00143] Субмодуль вычисления 6031 выполнен с возможностью вычисления пути уборки по текущему маршруту уборки от робота-уборщика до каждого зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика.
[00144] Третий субмодуль определения 6032 выполнен с возможностью определения зарядного порта, соответствующего кратчайшему пути уборки в качестве зарядного порта, который находится ближе всего к текущему положению робота-уборщика.
[00145] Что касается устройства по вышеупомянутому варианту осуществления настоящего изобретения, то конкретные способы работы отдельных модулей по данному варианту относятся к способам, которые подробно описаны в вариантах осуществления настоящего изобретения, касающихся способов, которые повторно не конкретизируются в настоящем документе.
[00146] Фигура 12 представляет собой блок-диаграмму, показывающую зарядное устройство робота-уборщика, в соответствии с примерным вариантом осуществления настоящего изобретения. Устройство может применяться в умных терминалах-уборщиках, таких как, роботы-уборщики.
[00147] Устройство 1200 может включать, по меньшей мере, один компонент из следующих: компонент обработки 1201, память 1202, компонент электропитания 1203, мультимедийный компонент 1204, аудиокомпонент 1205, интерфейс ввода/вывода (I/O) 1206, сенсорный компонент 1207 и коммуникационный компонент 1208.
[00148] Компонент обработки 1201 обычно контролирует общие операции устройства 1200, такие как, операции, связанные с изображением, вычислением маршрута и записью. Компонент обработки 1201 может включать, по меньшей мере, один процессор 1220 для выполнения команд для того, чтобы выполнить все или часть этапов из вышеописанных способов. Кроме того, компонент обработки 1201 может включать, по меньшей мере, один модуль, который облегчает взаимодействие между компонентом обработки 1201 и другими компонентами. Например, компонент обработки 1201 может включать мультимедийный модуль для облегчения взаимодействия между мультимедийным компонентом 1204 и компонентом обработки 1201.
[00149] Память 1202 выполнена с возможностью хранения различных типов данных для поддержания работы устройства 1200. Примеры таких данных включают команды для любых приложений или способов, используемых на устройстве 1200, сообщений, изображений и так далее. Память 1202 может быть реализована с использованием энергозависимых или энергонезависимых запоминающих устройств любого типа или их комбинации, таких как, статическое оперативное запоминающее устройство (SRAM), электрически-стираемое программируемое постоянное запоминающее устройство (EEPROM), стираемое программируемое постоянное запоминающее устройство (EPROM), программируемое постоянное запоминающее устройство (PROM), постоянное запоминающее устройство (ROM), магнитная память, флэш-память, магнитный или оптический диск.
[00150] Компонент электропитания 1203 подводит электричество к различным компонентам устройства 1200. Компонент электропитания 1203 может включать систему управления электричеством, по меньшей мере, один источник электричества и любые другие компоненты, связанные с генерацией, управлением и распределением электричества в устройстве 1200.
[00151] Мультимедийный компонент 1204 включает экран, обеспечивающий выходной интерфейс между устройством 1200 и пользователем. В некоторых вариантах осуществления настоящего изобретения, экран может включать жидкокристаллический дисплей (LCD) и сенсорную панель (TP). Если на экране имеется сенсорная панель, то экран может быть реализован как сенсорный экран для приема входных сигналов от пользователя. Сенсорная панель включает, по меньшей мере, один сенсорный датчик для восприятия касаний, скольжений и действий на сенсорной панели. Сенсорные датчики могут не только воспринимать границу касания или скольжения, но и воспринимать длительность и нажатие, связанные с касанием или скольжением. В некоторых вариантах осуществления настоящего изобретения, мультимедийный компонент 1204 включает камеру. Когда устройство 1200 находится в режиме уборки, камера может использоваться для получения внешних мультимедийных данных. Каждая камера может представлять собой фиксированную систему оптического объектива или иметь возможность фокусировки и оптического увеличения.
[00152] Аудиокомпонент 1205 выполнен с возможностью осуществления вывода и/или ввода аудиосигналов. Например, аудиокомпонент 1205 включает микрофон (MIC), выполненный с возможностью приема внешнего аудиосигнала, когда устройство 1200 находится в рабочем режиме, например, в режиме распознавания голоса. Полученный аудиосигнал в дальнейшем может храниться в памяти 1202 для выполнения распознавания речи компонентам обработки 1201. В некоторых вариантах осуществления настоящего изобретения, аудиокомпонент 1205 дополнительно включает динамик для вывода аудиосигналов.
[00153] Интерфейс ввода/вывода 1206 представляет собой интерфейс между компонентом обработки 1201 и периферийными интерфейсными модулями, такими как, клавиатура, колесо клика, кнопки и тому подобное. Кнопки могут включать, но без ограничения, кнопку возврата, кнопку громкости, кнопку запуска и кнопку блокировки.
[00154] Сенсорный компонент 1207 включает, по меньшей мере, один датчик для обеспечения статуса оценки различных аспектов устройства 1200. Сенсорный компонент 1207 может включать датчик присутствия, выполненный с возможностью определения присутствия соседних объектов без какого-либо физического контакта. Сенсорный компонент 1207 может также включать датчик освещенности, такой как датчик изображения CMOS (комплементарный металло-оксидный полупроводник) или CCD (токовый формирователь ЗУ на магнитных сердечниках), для использования в приложениях, предназначенных для обработки изображений. В некоторых вариантах осуществления настоящего изобретения, сенсорный компонент 1207 может также включать датчик акселерометра или датчик влажности.
[00155] Коммуникационный компонент 1208 выполнен с возможностью облегчения проводной или беспроводной связи между устройством 1200 и другими устройствами. Устройство 1200 может осуществлять доступ к беспроводной сети на основе коммуникационного стандарта, такого как, WiFi, 2G или 3G, или их комбинации. В одном примерном варианте осуществления настоящего изобретения, коммуникационный компонент 1208 дополнительно включает модуль связи ближнего радиуса действия (NFC) для облегчения связи малого радиуса действия. Например, модуль NFC может быть реализован на основе технологии радиочастотной идентификации (RFID), технологии ассоциация передачи данных в инфракрасном диапазоне (IrDA), сверхширокополосной технологии (UWB), технологии Bluetooth (BT) и других технологий.
[00156] В примерных вариантах осуществления настоящего изобретения, устройство 1200 может быть реализовано с помощью, по меньшей мере, одной специализированной интегральной микросхемы (ASIC), цифрового сигнального процессора (DSP), цифрового устройства обработки сигналов (DSPD), программируемого логического устройства (PLD), программируемой пользователем матрицы логических элементов (FPGA), контроллера, микроконтроллера, микропроцессора или другого электронного компонента для выполнения вышеописанных способов.
[00157] В примерных вариантах осуществления настоящего изобретения, также предлагается энергонезависимый машиночитаемый носитель данных, включающий команды, такой как, память 1202, включающая команды, причем, вышеупомянутые команды выполняются процессором 1220 в устройстве 1200, для выполнения вышеописанных способов. Например, энергонезависимый машиночитаемый носитель данных может представлять собой ROM, RAM, CD-ROM, магнитную ленту, гибкий диск, оптическое устройство хранения данных и тому подобное.
[00158] В настоящем изобретении также предлагается зарядное устройство робота-уборщика, включающее: процессор; память для хранения команд, выполняемых процессором; при этом, процессор выполнен с возможностью выполнения следующих действий: получения информации о положении зарядных портов, подходящих для робота-уборщика; когда определяется тот факт, что роботу-уборщику нужна зарядка, получение информации о текущем положении робота-уборщика; определение зарядного порта, который находится ближе всего к текущему положению робота-уборщика, в качестве ближайшего зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика; и контролирование перемещения робота-уборщика к ближайшему зарядному порту для зарядки, в соответствии с информацией о положении ближайшего зарядного порта.
[00159] Процессор также может быть выполнен с возможностью выполнения следующих действий: когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать, учет ближайшего зарядного порта в качестве начальной точки и определение первого маршрута уборки, соответственно; контролирование работы робота-уборщика по первому маршруту уборки.
[00160] Процессор также может быть выполнен с возможностью определения того факта, что роботу-уборщику нужна зарядка, посредством следующего действия: определения того факта, что роботу-уборщику нужна зарядка, когда оставшееся количество электричества робота-уборщика – меньше заданного значения.
[00161] Процессор также может быть выполнен с возможностью выполнения следующего действия: когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать, учет ближайшего зарядного порта в качестве начальной точки, определение области, которую робот-уборщик не убрал, в качестве области, подлежащей уборке, и определение второго маршрута уборки, соответственно; и контролирование работы робота-уборщика по второму маршруту уборки для уборки области, подлежащей уборке.
[00162] Процессор также может быть выполнен с возможностью определения того факта, что роботу-уборщику нужна зарядка, посредством следующего действия: определения того факта, что роботу-уборщику нужна зарядка, когда робот-уборщик завершает задачу уборки.
[00163] Процессор также может быть выполнен с возможностью определения зарядного порта, который находится ближе всего к текущему положению робота-уборщика в качестве ближайшего зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика, посредством следующего действия: вычисления пути уборки по текущему маршруту уборки от робота-уборщика до каждого зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика; определение зарядного порта, соответствующего кратчайшему путь уборки в качестве зарядного порта, который находится ближе всего к текущему положению робота-уборщика.
[00164] В вариантах осуществления настоящего изобретения также предлагается энергонезависимый машиночитаемый носитель данных, хранящийся с компьютерными программами, применяемыми к роботу-уборщику, и при выполнении команд процессором он заставляет процессор выполнять следующие действия: получение информации о положении зарядных портов, подходящих для робота-уборщика; когда определяется тот факт, что роботу-уборщику нужна зарядка, получение информации о текущем положении робота-уборщика; определение зарядного порта, который находится ближе всего к текущему положению робота-уборщика, в качестве ближайшего зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика; контролирование перемещения робота-уборщика к ближайшему зарядному порту, в соответствии с информацией о положении ближайшего зарядного порта.
[00165] Компьютерные программы, хранящиеся в энергонезависимом машиночитаемом носителе данных, могут выполняться дополнительно для осуществления следующих действий.
[00166] Обеспечение того, чтобы способ включал следующее: когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать, учет ближайшего зарядного порта в качестве начальной точки и определение первого маршрута уборки, соответственно; контролирование работы робота-уборщика по первому маршруту уборки.
[00167] Компьютерные программы, хранящиеся в энергонезависимом машиночитаемом носителе данных, могут выполняться дополнительно для осуществления следующих действий.
[00168] Определение того факта, что роботу-уборщику нужна зарядка, включает: определение того факта, что роботу-уборщику нужна зарядка, когда оставшееся количество электричества робота-уборщика – меньше заданного значения.
[00169] Компьютерные программы, хранящиеся в энергонезависимом машиночитаемом носителе данных, могут выполняться дополнительно для осуществления следующих действий.
[00170] Обеспечение того, чтобы способ включал следующее: когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать, учет ближайшего зарядного порта в качестве начальной точки, определение области, которую робот-уборщик не убрал, в качестве области, подлежащей уборке, и определение второго маршрута уборки, соответственно; и контролирование работы робота-уборщика по второму маршруту уборки для уборки области, подлежащей уборке.
[00171] Компьютерные программы, хранящиеся в энергонезависимом машиночитаемом носителе данных, могут выполняться дополнительно для осуществления следующих действий.
[00172] Определение того факта, что роботу-уборщику нужна зарядка, включает: определения того факта, что роботу-уборщику нужна зарядка, когда робот-уборщик завершает задачу уборки.
[00173] Компьютерные программы, хранящиеся в энергонезависимом машиночитаемом носителе данных, могут выполняться дополнительно для определения зарядного порта, который находится ближе всего к текущему положению робота-уборщика, в качестве ближайшего зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика посредством действий: вычисления пути уборки по текущему маршруту уборки от робота-уборщика до каждого зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика; определения зарядного порта, соответствующего кратчайшему путь уборки в качестве зарядного порта, который находится ближе всего к текущему положению робота-уборщика.
[00174] Другие варианты осуществления настоящего изобретения будут очевидны для специалистов в данной области техники из рассмотрения описания и практики изобретения, раскрытого в настоящем документе. Данная заявка предназначена для охвата любых изменений, вариантов использования или для адаптации настоящего изобретения, в соответствии с его общими принципами, и включая такие отклонения от настоящего изобретения, которые присутствуют в известной или обычной практике в данной области техники. Предполагается, что описание и примеры осуществления настоящего изобретения должны рассматриваться только как примерные, при этом, истинный объем и принцип настоящего изобретения указаны в нижеприведенной формуле изобретения.
[00175] Понятно, что настоящее изобретение не ограничивается конкретным устройством, которое было описано выше и показано на сопроводительных чертежах, и что различные модификации и изменения могут быть сделаны, не выходя за пределы его объема. Предполагается, что объем настоящего изобретения ограничивается только прилагаемой формулой изобретения.
Использование: в области электротехники. Технический результат – обеспечение экономии потребления электроэнергии роботом-уборщиком. Способ зарядки робота-уборщика, применяемый к роботу-уборщику, включает: получение информации о положении зарядных портов, подходящих для робота-уборщика; при определении того факта, что роботу-уборщику нужна зарядка, получение информации о текущем положении робота-уборщика; определение зарядного порта, который находится ближе всего к текущему положению робота-уборщика, в качестве ближайшего зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика; и контролирование перемещения робота-уборщика к ближайшему зарядному порту для зарядки, в соответствии с информацией о положении ближайшего зарядного порта. Определение того факта, что роботу-уборщику нужна зарядка, содержит: определение того факта, что роботу-уборщику нужна зарядка, когда оставшееся количество электричества робота-уборщика меньше заданного значения; а способ включает: учет ближайшего зарядного порта в качестве начальной точки для зарядки, определение области, где робот-уборщик не проводил уборку, в качестве области, подлежащей уборке, и определение второго маршрута уборки, соответственно, когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать, и контролирование того, что робот-уборщик работает по второму маршруту уборки для проведения уборки области, подлежащей уборке. 4 н. и 6 з.п. ф-лы, 12 ил.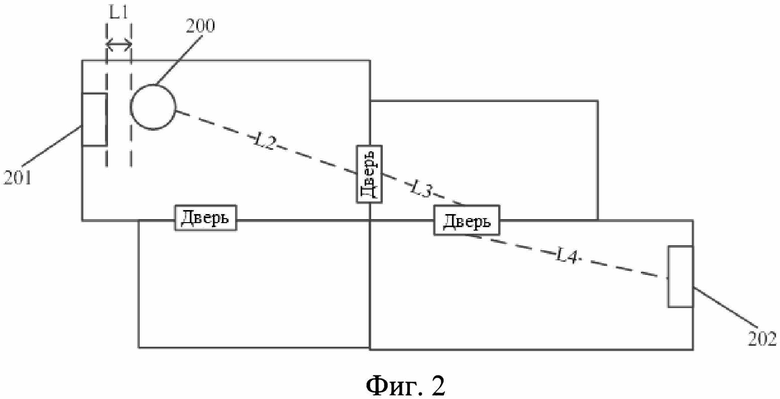
1. Способ зарядки робота-уборщика, применяемый к роботу-уборщику, включающий:
получение информации о положении зарядных портов, подходящих для робота-уборщика;
при определении того факта, что роботу-уборщику нужна зарядка, получение информации о текущем положении робота-уборщика;
определение зарядного порта, который находится ближе всего к текущему положению робота-уборщика, в качестве ближайшего зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика; и
контролирование перемещения робота-уборщика к ближайшему зарядному порту для зарядки, в соответствии с информацией о положении ближайшего зарядного порта;
отличающийся тем, что определение того факта, что роботу-уборщику нужна зарядка, содержит: определение того факта, что роботу-уборщику нужна зарядка, когда оставшееся количество электричества робота-уборщика меньше заданного значения; а
способ включает:
учет ближайшего зарядного порта в качестве начальной точки для зарядки, определение области, где робот-уборщик не проводил уборку, в качестве области, подлежащей уборке, и определение второго маршрута уборки, соответственно, когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать, и
контролирование того, что робот-уборщик работает по второму маршруту уборки для проведения уборки области, подлежащей уборке.
2. Способ по п. 1, дополнительно включающий:
учет ближайшего зарядного порта в качестве начальной точки и определение первого маршрута уборки, соответственно, когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать;
контролирование работы робота-уборщика по первому маршруту уборки.
3. Способ по п. 1, в котором определение того факта, что роботу-уборщику нужна зарядка, содержит:
определение того факта, что роботу-уборщику нужна зарядка, когда робот-уборщик завершает задачу уборки.
4. Способ по п. 1, в котором определение зарядного порта, который находится ближе всего к текущему положению робота-уборщика, в качестве ближайшего зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика, содержит:
вычисление пути уборки по текущему маршруту уборки от робота-уборщика до каждого зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика;
определение зарядного порта, соответствующего кратчайшему пути уборки в качестве зарядного порта, который находится ближе всего к текущему положению робота-уборщика.
5. Зарядное устройство робота-уборщика, применяемое к роботу-уборщику, включающее:
первый модуль получения, выполненный с возможностью получения информации о положении зарядных портов, подходящих для робота-уборщика;
второй модуль получения, выполненный с возможностью получения информации о текущем положении робота-уборщика при определении того факта, что роботу-уборщику нужна зарядка;
первый модуль определения, выполненный с возможностью определения зарядного порта, который находится ближе всего к текущему положению робота-уборщика, в качестве ближайшего зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика; и
первый модуль контроля, выполненный с возможностью контролирования перемещения робота-уборщика к ближайшему зарядному порту для зарядки, в соответствии с информацией о положении ближайшего зарядного порта;
отличающееся тем, что второй модуль получения содержит: первый субмодуль определения, выполненный с возможностью определения того факта, что роботу-уборщику нужна зарядка, когда оставшееся количество электричества робота-уборщика меньше заданного значения;
а устройство включает:
третий модуль определения, выполненный с возможностью учета ближайшего зарядного порта в качестве начальной точки, определения области, где робот-уборщик не проводил уборку, в качестве области, подлежащей уборке, и определения второго маршрута уборки, соответственно, когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать;
третий модуль контроля, выполненный с возможностью контролирования того факта, что робот-уборщик работает по второму маршруту уборки для проведения уборки области, подлежащей уборке.
6. Устройство по п. 5, дополнительно включающее:
второй модуль определения, выполненный с возможностью учета ближайшего зарядного порта в качестве начальной точки и определения первого маршрута уборки, соответственно, когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать;
второй модуль контроля, выполненный с возможностью контроля работы робота-уборщика по первому маршруту уборки.
7. Устройство по п. 5, в котором второй модуль получения содержит:
второй субмодуль определения, выполненный с возможностью определения того факта, что роботу-уборщику нужна зарядка, когда робот-уборщик завершает задачу уборки.
8. Устройство по п. 5, в котором первый модуль определения содержит:
субмодуль вычисления, выполненный с возможностью вычисления пути уборки по текущему маршруту уборки от робота-уборщика до каждого зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика;
третий субмодуль определения, выполненный с возможностью определения зарядного порта, соответствующего кратчайшему пути уборки в качестве зарядного порта, который находится ближе всего к текущему положению робота-уборщика.
9. Зарядное устройство робота-уборщика, применяемое к роботу-уборщику, включающее:
процессор;
память для хранения команд, выполняемых процессором;
при этом процессор выполнен с возможностью выполнения следующих действий:
получения информации о положении зарядных портов, подходящих для робота-уборщика;
получения информации о текущем положении робота-уборщика, при определении того факта, что роботу-уборщику нужна зарядка;
определения зарядного порта, который находится ближе всего к текущему положению робота-уборщика, в качестве ближайшего зарядного порта, в соответствии с информацией о положении зарядных портов и информацией о текущем положении робота-уборщика; и
контролирования перемещения робота-уборщика к ближайшему зарядному порту для зарядки, в соответствии с информацией о положении ближайшего зарядного порта;
отличающееся тем, что определение того факта, что роботу-уборщику нужна зарядка, содержит:
определение того факта, что роботу-уборщику нужна зарядка, когда оставшееся количество электричества робота-уборщика меньше заданного значения;
при этом процессор дополнительно выполнен с возможностью выполнения следующий действий:
учета ближайшего зарядного порта в качестве начальной точки для зарядки, определения области, где робот-уборщик не проводил уборку, в качестве области, подлежащей уборке, и определения второго маршрута уборки, соответственно, когда контролируется завершение зарядки робота-уборщика в ближайшем зарядном порте, и он начинает работать;
контролирования того, что робот-уборщик работает по второму маршруту уборки для проведения уборки области, подлежащей уборке.
10. Машиночитаемый носитель данных, хранящий компьютерные программы, применяемые к роботу-уборщику, и при выполнении их процессором, заставляет процессор выполнять способ по любому из пп. 1-4.
| CN 105527961 A, 27.04.2016 | |||
| CN 103580293 A, 12.02.2014 | |||
| US 2015150428 A1, 04.06.2015 | |||
| ЧИСТЯЩИЙ РОБОТ, ИМЕЮЩИЙ ФУНКЦИЮ АВТОВОЗВРАТА К ЗАРЯДНОМУ УСТРОЙСТВУ, И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2005 |
|
RU2323677C2 |

