Изобретение относится к способам стабилизации движения самоходных транспортно-технологических машин (ТТМ) сельскохозяйственного, строительно-дорожного, военного и др. назначений с подвижной составной частью, имеющей подвижность относительно корпуса машины, в виде навесного либо полунавесного функционального оборудования, рабочих органов и других устройств.
При движении по неровностям самоходные ТТМ воспринимают внешние возмущающие силы, которые отклоняют корпус машины относительно опорной поверхности, вызывают вибрации всех ее частей. Действие выделенных процессов сопровождается увеличением динамических нагрузок не только на узлы и детали, но и операторов машин, создавая для них дискомфортные или даже небезопасные условия труда, а также усложняя процесс управления машиной. Известно, что действие динамических нагрузок является причиной снижению скорости движения и производительности самоходных ТТМ до 40-50%. В связи с чем разработка способов стабилизации движения ТТМ является актуальной задачей для современного машиностроения.
В результате анализа уровня техники изобретения выявлены следующие аналоги и прототип.
Известен способ стабилизации движения автомобилей и колесных ТТМ за счет организации упруго-диссипативных связей между движителем и корпусом машины. Такой способ является наиболее простым, распространенным (Ротенберг Р.В. Подвеска автомобиля. Изд. 3-е, перераб. и доп. М., «Машиностроение», 1972, стр. 392.) и обеспечивающем при этом достаточный уровень стабилизации движения ТТМ. Современные подвески колес ТТМ могут быть управляемыми и обеспечивают широкий диапазон настроек для стабилизации движения на основных режимах эксплуатации машин.
К недостаткам выделенного способа следует отнести необходимость существенного усложнение конструкции ТТМ. Как правило, для реализации указанного способа, автомобиль оснащают подвеской колес, включающую направляющие, демпфирующие и упругие элементы. Такое усложнение конструкции не всегда целесообразно, в связи с чем многие виды современных ТТМ не имеют подвески колес.
Известен способ стабилизация движения колесных строительно-дорожных машин, который реализован на примере одноковшового экскаватора (Корчагин П.В., Е.А. Корчагина, И.А. Чакурин. Снижение динамических воздействий на оператора автогрейдера в транспортном режиме. Монография. - Омск: СибАДИ, 2009. - 195 с.), имеющего подвижную составную часть в виде навесного рабочего оборудования, шарнирно соединенного с корпусом машины. Подвижность между навесным оборудование и корпусом машины осуществляется с помощью гидроцилиндров, подключенных к гидропневморессорам с заданным уровнем упруго-диссипативных свойств. При движении такой ТТМ по неровностям ее корпус раскачивается вместе с навесным оборудованием. При этом из-за колебаний навесного оборудования из гидроцилиндров выталкивается рабочая жидкость в гидропневморессоры, которые за счет противодавления газовой полости и малых проходных сечений на пути перетекания рабочей жидкости обеспечивают сглаживание и демпфирование колебаний навесного оборудования. Снижение энергетики колебаний навесного оборудования обеспечивает стабилизацию движения экскаватора в целом. Таким образом, рассмотренный способ стабилизации движения самоходных ТТМ с навесным оборудованием достигается за счет поглощения энергии колебаний навесного оборудования в гидропневморессорах, являющихся обязательным элементом исполнительного привода.
Очевидным недостатком данного способа является вероятность возникновения резонанса колебаний колесной машины на эластичных шинах и навесного оборудования. Реализация данного способа также предполагает значительные перемещениями навесного оборудования относительно корпуса машины, что может в некоторой степени дезориентировать оператора и ухудшить безопасность движения. В случае движения ТТМ с подвижными относительно корпуса машины составными частями, например, в виде навесного оборудования данный способ имеет ограниченную эффективность из-за относительно небольшого хода подвески навесного оборудования, который определяется параметрами гидросистемы и компоновки машины.
Более близким по технической сущности является выбранный в качестве прототипа способ стабилизации движения многоосных транспортных средств (Фурунжиев Р.И., Оставин А.Н. Управление колебаниями многоопорных машин. - М.: Машиностроение, 1984. - 208 с., ил.) за счет принудительного приложения к корпусу машины стабилизирующих усилий со стороны исполнительного привода, установленного между колесами и корпусом машины.
Недостатки данного способа являются:
- невозможность перенастройки, например, в случаях увеличения массы ТТМ или присоединения к самоходной машине массивных подвижных составных частей, например, в виде навесных рабочих органов;
- реализация способа не возможна на ТММ без системы подрессоривания корпуса;
- значительные энергетические затраты на стабилизацию, обусловленные необходимостью приложения усилий на основную и наиболее массивную часть машины - корпус.
Несмотря на это последнее техническое решение по своей технической сущности наиболее близко предлагаемому и принято в качестве прототипа.
В случае движения с высокими скоростями ТТМ, особенно не оснащенные подвеской колес, имеют склонность к галопированию (ярко выраженным продольно-угловым колебаниям) и подпрыгиванию (вертикальным колебаниям). Колебания машин, как правило, заставляют уменьшать скорость движения, что негативно отражается на их производительности.
На основе анализа конструкции и компоновки самоходных машин авторы установили, что снизить негативные явления, связанные с галопированием самоходных ТТМ, возможно путем приложения к корпусу машины стабилизирующих усилий при принудительном повороте составной части машины относительно ее корпуса.
Задачей изобретения является - снижение динамических нагрузок, действующих на машину и ее оператора при движении самоходных ТТМ с составной частью машины, имеющей подвижность относительно ее корпуса, в виде навесного либо полунавесного функционального оборудования, рабочих органов и других устройств.
Технический результат - приложение на корпус самоходной ТТМ со стороны исполнительного привода, обеспечивающего подвижность составной части машины, стабилизирующих усилий, обеспечивающих принудительное выравнивание положения корпуса машины.
Указанный технический результат достигается за счет того, что при движении ТТМ с помощью исполнительного привода создают стабилизирующие усилия, воздействующих на ее корпус, причем в процессе создания стабилизирующих усилий с помощью исполнительного привода формируют активную силу, с возможностью поворота подвижной составной части машины относительно ее корпуса и силу реакции, действующую на корпус машины, при этом активная сила и сила реакции создают относительно центра масс корпуса машины противоположно направленные вращающие моменты с плечами разной величины, разница которых обеспечивает формирование стабилизирующего момента, действующего против направления углового перемещения корпуса машины с возвращением его в исходное положение.
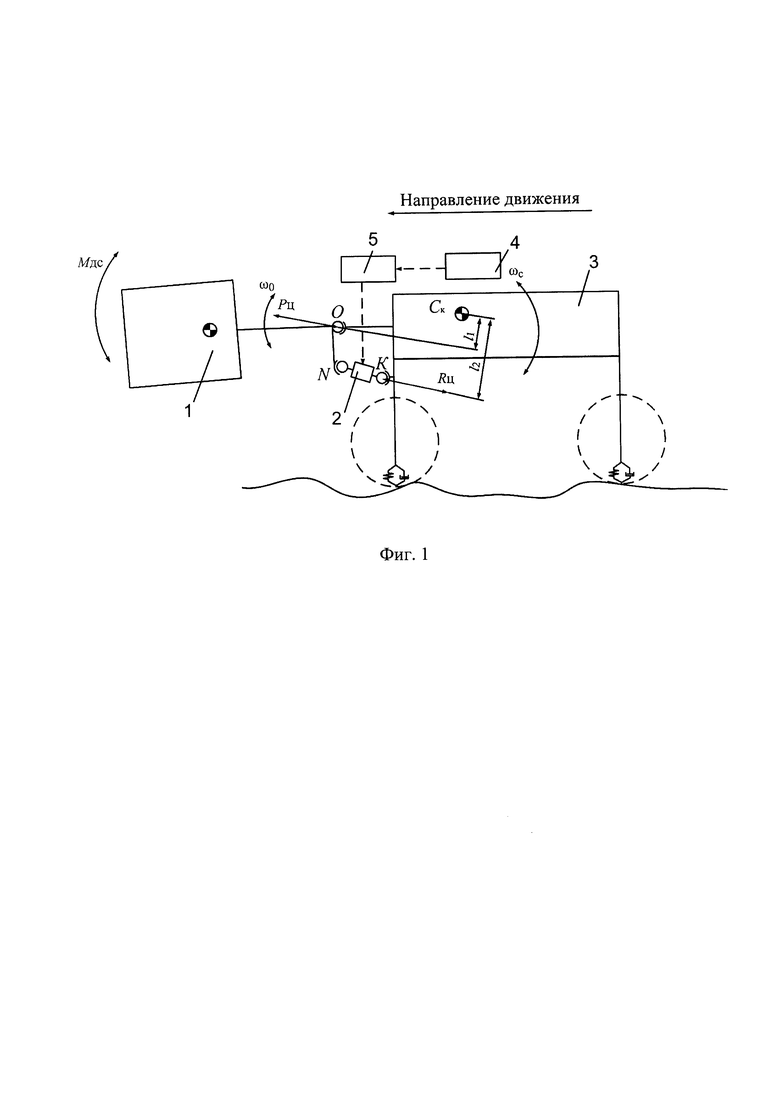
На фиг. 1 изображена схема и основные части самоходной ТТМ включающие: 1 - подвижную составную часть машины; 2 - исполнительный привод; 3 - корпус машины; 4 - датчики состояния машины; 5 - блок управления.
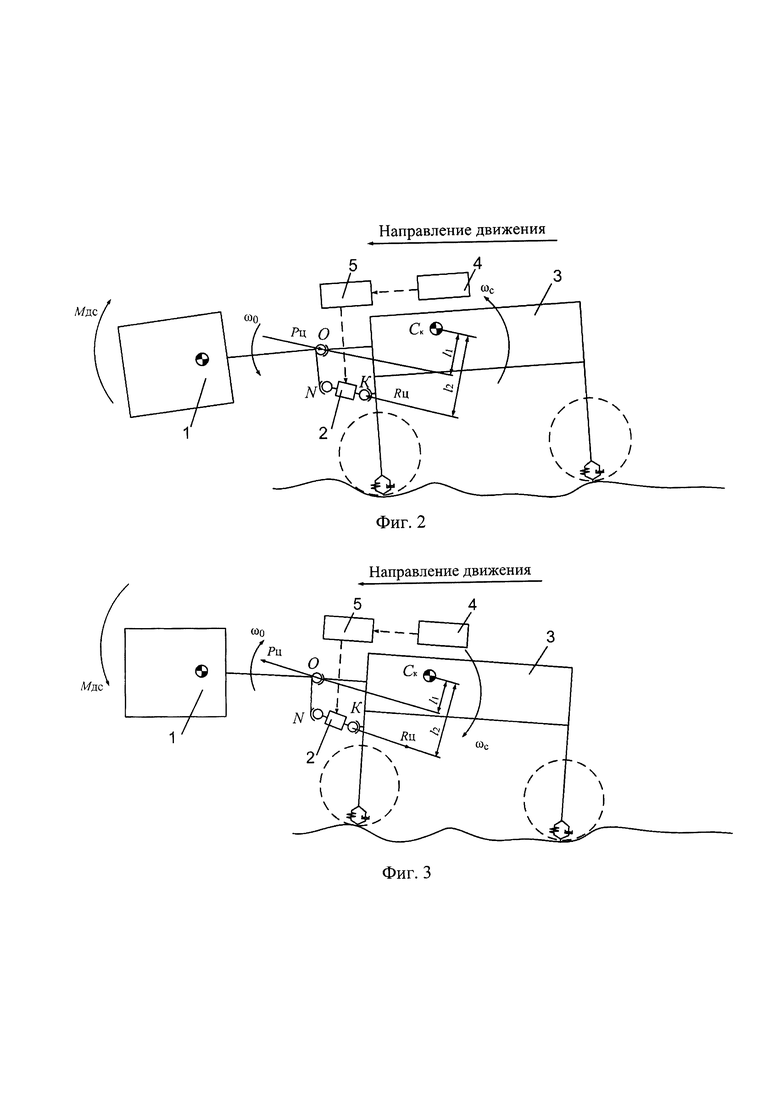
На фиг. 2 показана схема стабилизации самоходной ТТМ в случае крена корпуса вперед.
На фиг. 3 показана схема стабилизации самоходной ТТМ в случае крена корпуса назад.
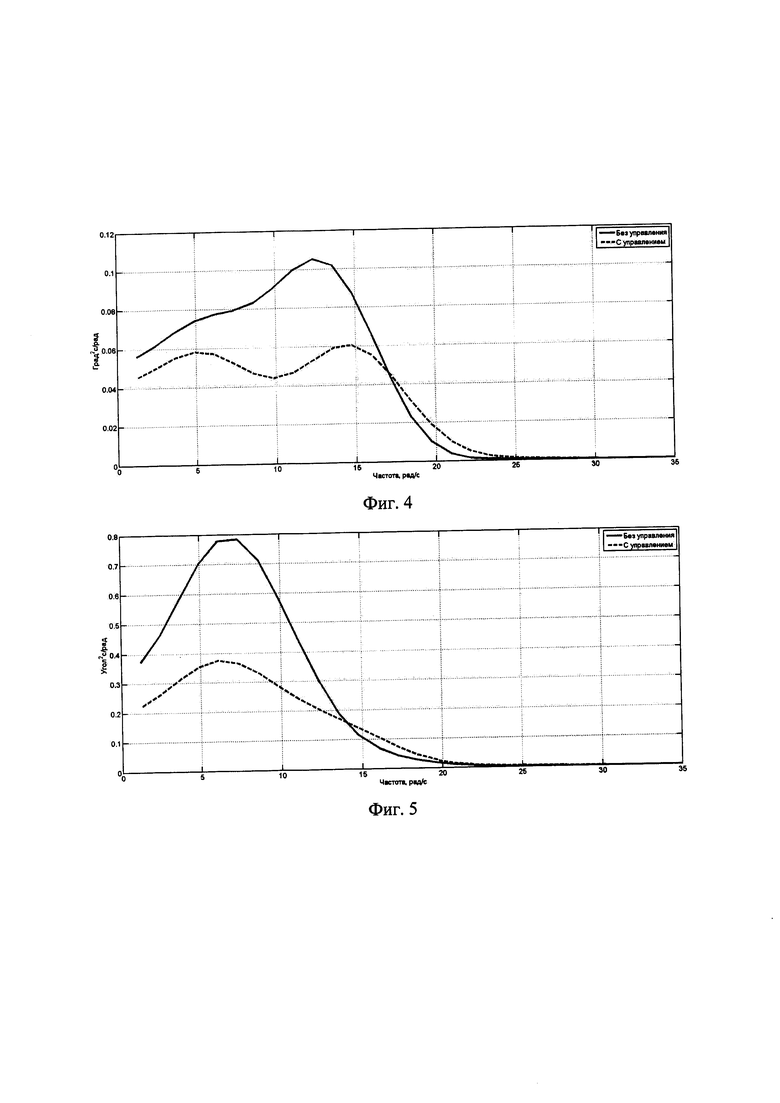
На фиг. 4 представлены полученные с помощью имитационного моделирования спектральные плотности углов продольного наклона корпуса самоходной ТТМ со стабилизацией корпуса машины по предложенному способу и без него при движении по грунтовой дороге со скоростью 5 км/ч.
На фиг. 5 представлены полученные с помощью имитационного моделирования спектральные плотности углов продольного наклона корпуса самоходной ТТМ со стабилизацией корпуса машины по предложенному способу и без него при движении по грунтовой дороге со скоростью 10 км/ч.
Описание позиций и принятые обозначения на фиг. 1-3:
1 - подвижная составная часть машины;
2 - исполнительный привод;
3 - корпус машины;
4 - датчики состояния машины;
5 - блок управления;
Ск - положение центра масс корпуса машины;
О - центр качания подвижной составной части машины 1;
K,N - точки крепления исполнительного привода 2;
ωC - угловая скорость корпуса ТТМ относительно центра масс;
ω0 - угловая скорость при повороте подвижной составной части машины относительно центра качания О;
Мдс - стабилизирующий момент;
Рц - активная сила, приложенная со стороны исполнительного привода к подвижной составной части машины при ее принудительном повороте относительно корпуса машины;
Rц - сила реакция, действующая на корпус машины со стороны исполнительного привода при принудительном повороте подвижной составной части машины.
 - плечо действия активной силы Рц относительно центр масс корпуса машины Ск;
- плечо действия активной силы Рц относительно центр масс корпуса машины Ск;
 - плечо действия силы реакции Rц относительно центр масс корпуса машины Ск.
- плечо действия силы реакции Rц относительно центр масс корпуса машины Ск.
Представленный пример машины может быть рассмотрен как двух массовая динамическая система, а указанные стабилизирующие усилие, действующие на корпус машины 3, может быть реализовано со стороны исполнительного привода 2 при повороте подвижной составной части машины 1 относительно центра качания О (фиг. 1).
Величина возможных стабилизирующих усилий будет определятся не только массо-габаритными параметрами подвижной составной части машины 1, но и кинематическими параметрами ее поворота относительно корпуса машины 3 с помощью исполнительного привода 2.
В качестве исполнительного привода 2 для поворота подвижной составной части машины 1 может быть применен гидравлический, электромеханический, пневматический или др. тип привода.
Рабочий процесс разработанного способа стабилизации рассмотрим на примере самоходной ТТМ с колесным движителем и подвижной составной частью машины 1 в виде навесного оборудования, расположенного спереди, и имеющего за счет исполнительного привода 2 и шарнирного соединения с корпусом машины 3 одну вращательную степень свободы относительно центра качания О подвижной составной части машины 1. В случае движения самоходной ТТМ по неровностям возникают продольно-угловые колебания ее корпуса 3, которые можно описать, например, угловой скоростью продольно-угловых колебаний корпуса ωC (фиг. 1). При галопировании корпуса машины 3 сигнал от датчиков состояния самоходной ТТМ, обладающих возможностью определения кинематических параметров движения корпуса машины 3 и передачи сигнала, подают в блок управления, установленный с возможностью вычисления и передачи управляющего сигнала на исполнительный привод 2, который обеспечивает принудительный поворот навесного оборудования 1 относительно корпуса машины 3 путем приложения активной силы Рц к точке крепления N управляющего исполнительного привода 2. Если подвижную составную часть 1 машины представить абсолютно твердым телом, то в соответствии с леммой Пуансо активная сила Рц переносится параллельно первоначальному положению и прикладывается к центру качания О подвижной составной части машины 1 (фиг. 2). При этом в момент поворота подвижной составной части машины 1 на корпус машины 3 со стороны исполнительного привода 2 также действует сила реакция Rц, приложенная к точке крепления TV управляющего исполнительного привода 2. Активная сила Рц и сила реакция Rц на соответствующих плечах  и
и  формируют относительно центра масс корпуса машины пару моментов, за счет разницы которых обеспечивается формирование стабилизирующего момента Мдс. Величина и направление активной силы Рц и силы реакция Rц зависит от направления и кинематических параметров (угловой скорости ω0, углового ускорения) поворота подвижной составной части 1 относительно ее корпуса машины 3.
формируют относительно центра масс корпуса машины пару моментов, за счет разницы которых обеспечивается формирование стабилизирующего момента Мдс. Величина и направление активной силы Рц и силы реакция Rц зависит от направления и кинематических параметров (угловой скорости ω0, углового ускорения) поворота подвижной составной части 1 относительно ее корпуса машины 3.
При крене корпуса машины 3 вперед (фиг. 2) сигнал от датчиков состояния 4, обладающих возможностью определения кинематических параметров движения корпуса машины 3 и передачи сигнала, подают в блок управления 5, установленный с возможностью вычисления и передачи управляющего сигнала на исполнительный привод 2, который путем приложения активной силы Рц к точке крепления N управляющего исполнительного привода 2 обеспечивает принудительный поворот подвижной составной части 1 относительно центр качания О против часовой стрелки с заданным уровнем угловой скорости ωO (фиг. 2). Действующие сила Рц и реакция Rц действуют навстречу друг другу и относительно центра масс на плечах  и
и  формируют моменты сил с противоположными знаками. Однако из-за того, что сила Рц действует на меньшем плече, чем реакция Rц, то суммарный динамический момент стабилизации Мдс, действует в противоположном направлении поворота корпуса машины 3 и возвращает его в исходное положением (фиг. 2).
формируют моменты сил с противоположными знаками. Однако из-за того, что сила Рц действует на меньшем плече, чем реакция Rц, то суммарный динамический момент стабилизации Мдс, действует в противоположном направлении поворота корпуса машины 3 и возвращает его в исходное положением (фиг. 2).
В случае крена корпуса машины 3 назад (фиг. 3) сигнал от датчиков состояния машины 4, обладающих возможностью определения кинематических параметров движения корпуса машины 3 и передачи сигнала, подают в блок управления 5, установленный с возможностью вычисления и передачи управляющего сигнала на исполнительный привод 2. Исполнительный привод 2 обеспечивает поворот подвижной составной части машины 1 относительно центр качания О по часовой стрелке с заданной угловой скоростью ωO (фиг. 3). В этот момент активная сила Рц и сила реакция Rц действуют в разные стороны, а момент, сформированный реакцией Rц на плече  больше, чем
больше, чем  в результате чего корпус машины возвращается в исходное положение от действия момента Мдс, направленного против часовой стрелки относительно центра масс корпуса машины Ск.
в результате чего корпус машины возвращается в исходное положение от действия момента Мдс, направленного против часовой стрелки относительно центра масс корпуса машины Ск.
Таким образом, в результате принудительного поворота подвижной составной части 1 относительно центра качения О формируется сила реакции Rц, действующая на корпус машины 3 и, как следствие, возникает стабилизирующий момент Мдс, действующего против направления углового перемещения корпуса машины и возвращающий его в исходное положение. Направление действия момента Мдс определяется направлением поворота подвижной составной части машины 1 относительно центр качания О, а его величина зависит от массо-габаритных свойств подвижной составной части машины и кинематических параметров поворота.
Заявителем разработаны математические и имитационные модели, с помощью которых обоснована эффективность и работоспособность предложенного способа стабилизации ТТМ на примере самоходного кормоуборочного комбайна с составной подвижной частью в виде навесного адаптера. Посредствам имитационного моделирования построены спектральные плотностях углов продольного наклона корпуса кормоуборочного комбайна при прямолинейном движении по грунтовым дорогам со скоростью 5 км/ч (фиг. 4) и 10 км/ч (фиг. 5) из которых видно, что стабилизация корпуса машины по предложенному способу позволяет снизить пиковые значения параметра колебаний до 25-60%.
Осуществление описанного способа позволяет уменьшить динамические нагрузки, действующих на машину и ее оператора за счет приложение на корпус ТТМ со стороны исполнительного привода, обеспечивающего подвижность составной подвижной части, стабилизирующих усилий и, как следствие, стабилизирующего момента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система стабилизации движения самоходных транспортно-технологических машин | 2020 |
|
RU2747331C1 |
| Пневматическая виброизолирующая опора | 2019 |
|
RU2728879C1 |
| СОЧЛЕНЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО С КОЛЕСНО-ШАГАЮЩИМ ДВИЖИТЕЛЕМ | 2018 |
|
RU2684956C1 |
| Стенд для динамических испытаний виброизоляторов | 2019 |
|
RU2723975C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ТРАНШЕЙНО-КОТЛОВАННОЙ МАШИНЫ И ОПОРНАЯ КОНСТРУКЦИЯ ДЛЯ РАБОЧЕГО ОБОРУДОВАНИЯ | 2008 |
|
RU2371551C1 |
| Способ испытания движителей и устройство для его осуществления | 1985 |
|
SU1332175A1 |
| СИСТЕМА КОНТРОЛЯ ГРУЗОВОЙ УСТОЙЧИВОСТИ МОБИЛЬНЫХ ГРУЗОПОДЪЕМНЫХ МАШИН | 2004 |
|
RU2267458C1 |
| БРОНИРОВАННАЯ ГУСЕНИЧНАЯ ИЛИ КОЛЕСНАЯ БОЕВАЯ МАШИНА | 2023 |
|
RU2824569C1 |
| ЗУБЧАТО - ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2636440C2 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2033955C1 |
Изобретение относится к способам стабилизации движения самоходных транспортно-технологических машин с навесным, либо полунавесным функциональным оборудованием, в виде составных подвижных частей, которые имеют подвижность относительно ее машины. Способ стабилизации машин заключается в том, что создают с помощью исполнительного привода стабилизирующие усилия, воздействующие на корпус машин. В процессе создания стабилизирующих усилий формируют активную силу, с возможностью поворота подвижной составной части машины относительно ее корпуса, и силу реакции, действующую на корпус машины. Активная сила и сила реакции создают относительно центра масс корпуса машины противоположно направленные вращающие моменты с плечами разной величины. С помощью разниц величин обеспечивают формирование стабилизирующего момента, действующего против направления углового перемещения корпуса машины с возвращением его в исходное положение. Достигается выравнивание положения корпуса машины. 5 ил.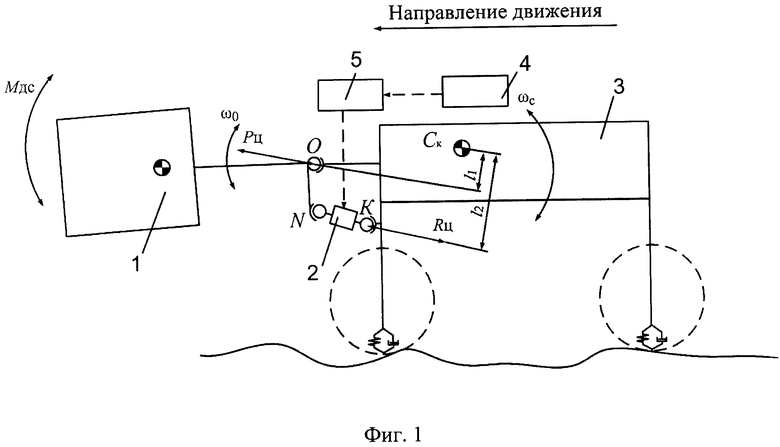
Способ стабилизации движения самоходных транспортно-технологических машин, заключающийся в создании с помощью исполнительного привода стабилизирующих усилий, воздействующих на корпус машин, отличающийся тем, что в процессе создания стабилизирующих усилий с помощью исполнительного привода формируют активную силу, с возможностью поворота подвижной составной части машины относительно ее корпуса и силу реакции, действующую на корпус машины, при этом активная сила и сила реакции создают относительно центра масс корпуса машины противоположно направленные вращающие моменты с плечами разной величины, разница которых обеспечивает формирование стабилизирующего момента, действующего против направления углового перемещения корпуса машины с возвращением его в исходное положение.
| Научное издание МГТУ им | |||
| Н.Э | |||
| Баумана | |||
| Наука и образование | |||
| Спускная труба при плотине | 0 |
|
SU77A1 |
| Синтез адаптивной динамической непрерывной системы гашения колебаний корпуса многоосных колесных машин | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| ПОВОРОТНО-ДЕЛИТЕЛЬНЫЙ СТОЛ | 0 |
|
SU347169A1 |
| Способ и устройство для стабилизации крутящего момента на ведущих колесах | 2017 |
|
RU2668141C1 |
| Научная электронная библиотека "Киберленинка" | |||
| > Экспериментальное | |||

