Изобретение относится к робототехнике и транспортным системам и может быть использовано как самодвижущееся устройство, так и устройство для перемещения грузов, а также как исполнительное устройство робота.
Известно транспортирующее устройство (патент США N 3929221, кл. В 65 G 27/00), содержащее корпус из гибкого упругого материала с установленными на нем стержнями и управляемый привод. Достоинствами известного устройства являются простота и экономичность в создании механических перемещений для транспортировки грузов.
Недостатком этого устройства является ограниченность функциональных возможностей лишь транспортными операциями, причем лишь твердых объектов без возможности управления их траекториями движения.
Наиболее близким к предлагаемому является транспортирующее устройство [1] содержащее корпус из гибкого упругого материала с установленными на нем стержнями и управляемый привод (вибратор).
Данное устройство обладает недостатками, обусловленными незащищенностью рабочих органов-стержней, что ограничивает перечень возможных транспортируемых грузов (невозможность перемещать жидкие, сыпучие материалы) и допускает возможность заклинивания стержней. Кроме этого данное устройство не имеет возможности управления траекторией движения каждого из перемещаемых предметов.
Целью изобретения является расширение технологических возможностей транспортирующего устройства.
Цель достигается тем, что транспортирующее устройство содержит корпус из гибкого упругого материала с установленными на нем стержнями с образованием рабочей поверхности, каждый стержень соединен с корпусом посредством шарового шарнира, при этом устройство снабжено связанным с управляемым приводом механизмом качания стержней и защитным упругим приспособлением, выполненным в виде пленки, закрепленной на стержнях со стороны рабочей поверхности и герметически соединенной с краями корпуса, позволяет добиться возможности управляемых перемещений грузов всех типов и защитить рабочие органы-стержни от заклинивания.
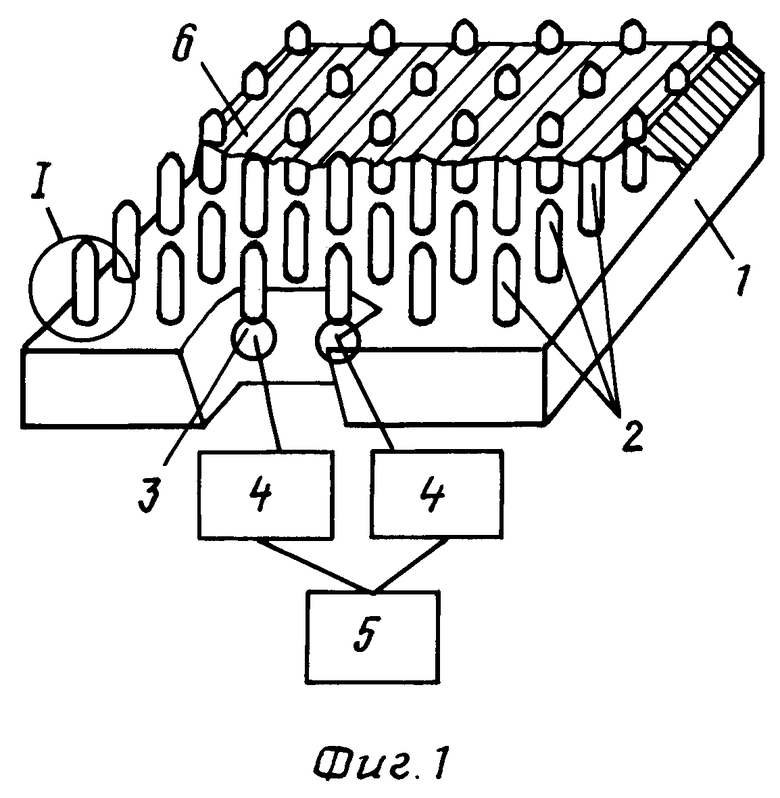
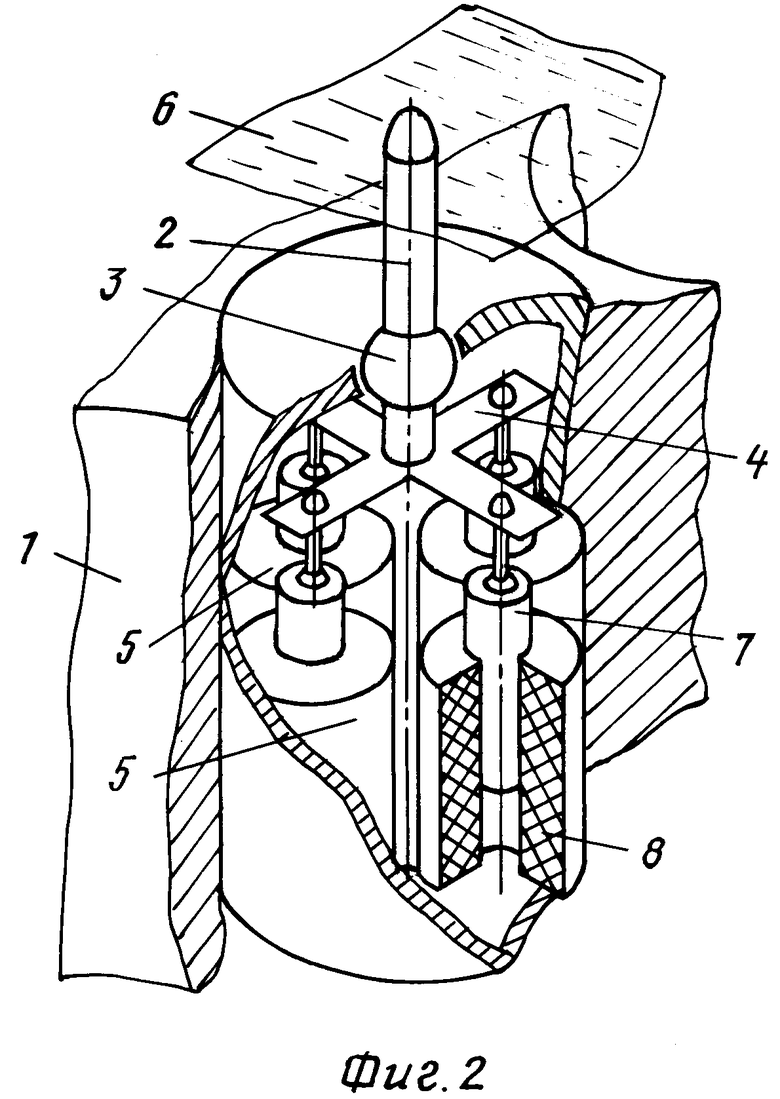
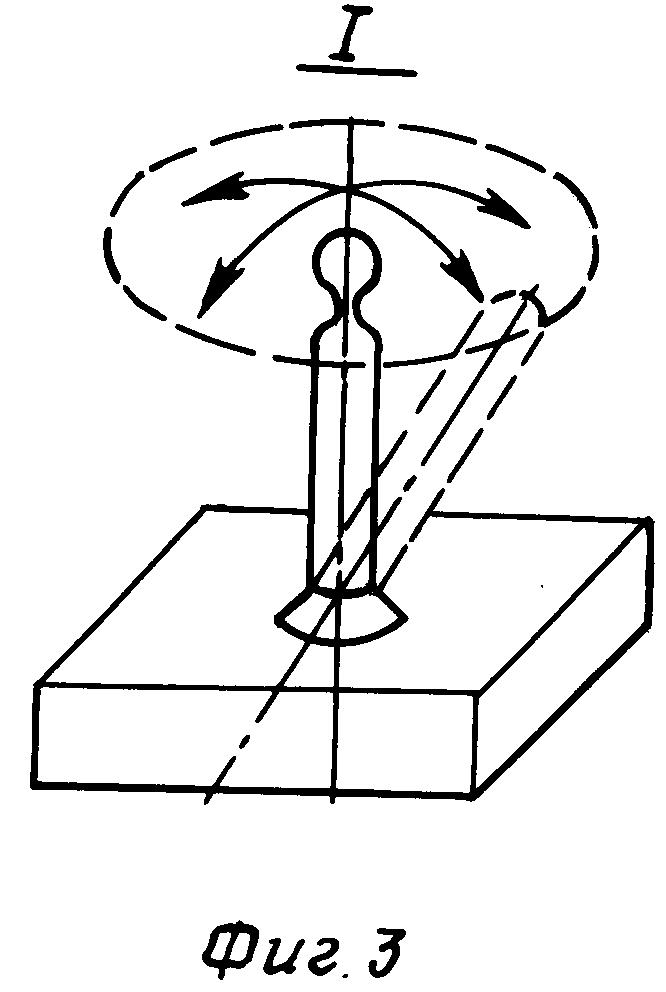
На фиг.1 представлено транспортирующее устройство; на фиг.2 то же, вариант крепления стержней к корпусу посредством шарового шарнира и вариант механизма качания; на фиг. 3 узел I на фиг.1.
Транспортирующее устройство (фиг.1, 2) содержит корпус 1 из гибкого упругого материала, стержень 2, шаровые шарниры 3, механизм 4 качания, управляемый привод 5, упругое покрытие (пленка) 6.
В корпусе 1 закреплены стержни 2 посредством шаровых шарниров 3 (фиг.2). Стержни 2 связаны посредством механизма 4 качания, например, в виде шатунного механизма с управляемым приводом 5, например, в виде электромагнитов с втягиваемым якорем 7 и катушкой 8, к стержням 2 прикреплено защитное упругое приспособление в виде пленки 6, герметично соединенное с краями корпуса 1.
Транспортирующее устройство работает следующим образом.
Управляемый привод 5 через механизм 4 качания вызывает циклические угловые перемещения стержней 2, обеспечивая при этом желаемые закон и фазировку этих перемещений.
Перемещение крупных (которые опираются на шесть и более стеpжней) предметов и самодвижение может быть вызвано различными способами: шагание; бег; ползание.
При шагании можно выделить две основные фазы движения стержней: фазу опоры и фазу переноса. В фазе опоры мгновенное значение угла наклона стержня 2 по отношению к нормали рабочей поверхности меньше, чем в фазе переноса. Эта разница должна быть такой, чтобы стержни в фазе переноса не контактировали с перемещаемым предметом или вызывали силу трения между стержнем 2 и перемещаемым предметом меньше, чем в фазе переноса. Процесс шагания заключен в чередовании во времени фаз опоры и переноса. При этом предмет опирается на одни стержни, а другие переносятся на новое место опоры. Направление движения перемещаемого предмета совпадает с направлением движения контактирующей точки стержня 2 в фазе опоры, а при самодвижении устройства движение устройства противоположно направлению движения контактирующей точки стержня 2 в фазе опоры.
Способ бег отличается от шагания тем, что стержни в фазе опоры вызывают вертикальное перемещение предмета такой величины, что это приводит к отрыву предмета от устройства, а в это время стержни перемещаются на новые опоры.
При ползании движение вызывается волнами продольных деформаций (по отношению к рабочей поверхности) в перемещаемом предмете или в корпусе 1. Деформации вызываются силами реакции на силу трения между перемещаемым предметом и стержнями 2 в фазе опоры. Направление распространения волны деформаций обеспечивается фазировкой движения стержней 2.
Гибкий упругий корпус 1 позволяет придавать устройству необходимую форму, способствует равномерному перераспределению давления на концы стержней. Упругое покрытие 6 кроме изолирующих и защитных функций придает устройству способность перемещать жидкие, сыпучие, а также вязкие материалы. Для перемещения этих материалов применяется волнообразный способ фазировки движения стержней 2. Сущность такой фазировки заключена в перемещении впадин в упругом покрытии 6, возникающих при наклоне стержней 2. При этом материал перемещается в направлении распространения фронта волны.
Кроме перемещения предметов устройство может создавать поле активных пульсирующих сил. Элементом этого поля является сила, создаваемая одним стержнем. Такое поле сил может не только перемещать, но и деформировать перемещаемый предмет, например, с целью разравнивания.
Конкретное исполнение заявляемого устройства может быть различным, но для анализа свойств выбран вариант, где механизм качания и управляемый привод обеспечивают сепаратное управление качаниями стержней.
Предлагаемому устройству присущи следующие положительные свойства: способность перемещать грузы всех типов; возможность управлять движением грузов (поворачивать, менять направление движения во время движения); возможность самодвижения; малое давление ввиду большой площади опоры; высокая энергонасыщенность. Это свойство объясняется тем, что основная масса устройства принадлежит силообразующим элементам и близка к энергонасыщенности электрического двигателя (порядка 20-30 Вт на килограмм), кроме этого возможно кратковременное трех-четырехкратное увеличение мощности; модульность и перестраиваемость геометрии ходовой части или рабочей поверхности. Рабочая поверхность робота или ходовая часть транспортного средства может состоять из конструктивно совместимых модулей, что позволяет собирать устройство с желаемой геометрией рабочей поверхности или ходовой части; конструкция не затрудняет применение различного рода датчиков вблизи транспортируемых предметов; высокая надежность, которая объясняется надежностью элементов, простотой и высокой прочностью конструкции, ее герметичностью, а также некритичностью к выходу из строя некоторого количества стержней, кроме того, имеется возможность программной адаптации к отказам стержней или модулей; быстрая восстанавливаемость, обусловленная простотой локализации неисправности с помощью тестов, а также простотой замены неисправного компонента; ремонтопригодность; возможность качественной дезактивации и дегазации устройства, что объясняется герметичностью, доступностью всей поверхности устройства для дегазации и дезактивации, а также возможностью применения пленочного одноразового покрытия; возможность создания устройств для работы в трубопроводах, технологических емкостях ввиду герметичности и относительно малой площади поперечного сечения, а также возможности создания управляемой движущей силы в жидкости; герметичность и полная изолированность от внешней среды обеспечивается особенностями конструкции, и их реализация не требует дополнительных затрат; долговечность, так как изделие не содержит быстроизнашивающихся элементов; простота и исключительная гибкость управления: для управления качанием стержня можно применять простые законы управления, например логический закон управления; возможность управления от бытового компьютера, что дает возможность создания разнообразных бытовых приборов; дешевизна технологии производства и ее организации. Эти свойства вытекают из модульности, регулярности конструкции, отсутствия повышенных требований к точности, использования традиционных материалов и стандартных изделий, потенциальной возможности автоматизации основных операций формообразований и сборки, простоты наладки, небольшой номенклатуры комплектующих, простоты операций формообразования; малые затраты на техническое обслуживание, которое представляется достаточно простым ввиду надежности устройства, его герметичности, модульности, отсутствия необходимости регулярной смазки, очистки, регулировки, замены элементов, и пр. изделие утилизируемо, не загрязняет среду; малые затраты на хранение, транспортировку, сворачивание и разворачивание, что вытекает из модульности, герметичности; безопасность эксплуатации, так как в устройстве нет опасных для жизни электрических напряжений и открытых подвижных элементов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГАЮЩЕЕ УСТРОЙСТВО | 2016 |
|
RU2642020C2 |
| ДВУХКОНСОЛЬНЫЙ ДОЖДЕВАЛЬНЫЙ АГРЕГАТ | 2002 |
|
RU2222184C2 |
| Шагающее транспортное средство | 1982 |
|
SU1126488A1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА С ПОВЫШЕННОЙ ПРОХОДИМОСТЬЮ НА СЛАБЫХ ГРУНТАХ | 2016 |
|
RU2653407C1 |
| ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО | 2018 |
|
RU2699003C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО НА ШАГАЮЩЕМ ДВИЖИТЕЛЕ | 1991 |
|
RU2049696C1 |
| ПЛАВУЧЕ-ШАГАЮЩИЙ ДОННЫЙ АППАРАТ | 2001 |
|
RU2214940C2 |
| Устройство для нанесения покрытия на направляющие станков | 1984 |
|
SU1235552A1 |
| Прибор для исследования процессов трения | 1974 |
|
SU530226A1 |
| УСТРОЙСТВО СЛЕЖЕНИЯ И КОНТРОЛЯ | 2020 |
|
RU2753824C1 |
Изобретение относится к робототехнике и транспортным системам и может быть использовано в составе транспортных или транспортно-технологических систем и устройств для премещения грузов или в качестве самодвижущегося устройства. Устройство содержит корпус из гибкого упругого материала, стержень, шаровые шарниры, механизм качания, управляемый привод, упругое покрытие. В корпусе закреплены стержни посредством шаровых шарниров. Стержни связаны посредством механизма качания, например, в виде шатунного механизма с управляемым приводом, например, в виде электромагнитов с втягиваемым якорем и катушкой. К стержням прикреплено защитное упругое приспособление в виде пленки, герметично соединенное с краями корпуса. Управляемый привод через механизм качания вызывает циклические угловые перемещения стержней, обеспечивая желаемые закон и фазировку этих перемещений. Гибкий упругий корпус позволяет придавать устройству необходимую форму, способствует равномерному перераспределению давления на концы стержней. Упругое покрытие кроме изолирующих и защитных функций придает устройству способность перемещать жидкие, сыпучие, а также вязкие материалы. Для перемещения этих материалов применяется волнообразный способ фазировки движения стержней. Сущность такой фазировки заключена в перемещении впадин в упругом покрытии, возникающих при наклоне стержней. При этом материал перемещается в направлении распространения фронта волны. 3 ил.
ТРАНСПОРТИРУЮЩЕЕ УСТРОЙСТВО, содержащее корпус из гибкого упругого материала, установленные на нем стержни с образованием рабочей поверхности и управляемый привод, отличающееся тем, что, с целью расширения технологических возможностей устройства путем обеспечения транспортирования всех типов груза в различных направлениях, каждый стержень соединен с корпусом посредством шарового шарнира, при этом устройство снабжено связанным с управляемым приводом механизмом качания стержней и защитным упругим приспособлением, выполненным в виде пленки, закрепленной на стержнях и герметично соединенной с краями корпуса.
| Патент США N 3667590, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
