Изобретение относится к области средств освоения мирового океана и проведения подводных работ, в частности, к конструктивному облику и архитектуре современных необитаемых подводных аппаратов.
В настоящее время активно используются несколько основных видов необитаемых подводных аппаратов (НПА), в число которых входят буксируемые, автономные и телеуправляемые по кабелю аппараты. Они предназначены для выполнения свойственных им задач, в том числе поиска и обследования затонувших объектов. Так, с помощью буксируемых аппаратов осуществляют поиск затонувших объектов на больших площадях, а автономные аппараты ведут поиск в меньших по размерам районах. Телеуправляемые НПА осуществляют допоиск и телевизионное обследование объектов в ограниченных районах, а при наличии манипуляторов выполняют типовые подводные работы (подъем фрагментов, остропка, очистка от ила и т.д.). Предлагаемый в заявке составной аппарат универсален и предназначен для выполнения несколько функций благодаря особенностям своего конструктивного исполнения.
Известно техническое решение компании General Dynamics, создавшей и испытавшей автономные необитаемые подводные аппараты (АНПА) Bluefin-21 с размещенными во внутреннем отсеке его корпуса двумя малыми автономными аппаратами. Информация, собранная бортовыми датчиками большого АНПА-носителя, хранится в памяти этих малых роботов-ретрансляторов SandShark. Выпущенные в заданной точке из корпуса Bluefin-21 как торпеды, они поднимаются на поверхность и передают информацию своего носителя надводным кораблям, одновременно обеспечивая обратную трансляцию команд по дальнейшим действиям на свой АНПА-носитель по гидроакустическому каналу [1].
Недостатком такого конструктивного решения являются ограниченные возможности АНПА-носителя, обеспечивающего только пуск малых аппаратов-ретрансляторов для передачи информации, отсутствие у них из-за малых габаритов дополнительной аппаратуры или рабочих органов (манипуляторов), а также невозможность возвращения их на борт АНПА-носителя.
Известна разработка французского противоминного аппарата «Ремора» (на базе корпуса серийного аппарата «Redermor»), состоящего из двух автономных аппаратов. Большой автономный модуль торпедообразной обтекаемой формы осуществляет своими техническими средствами поиск и классификацию объекта (мины) на грунте. Он одновременно обеспечивает транспортировку малого АНПА, который крепится салазками-опорами к захвату на спине носителя. Малый автономный аппарат после расстыковки с носителем обследует обнаруженный большим модулем объект (мину), идентифицируя его своим гидролокатором, сбрасывает около него гидроакустический приводной маяк и возвращается на носитель, либо самостоятельно всплывает на поверхность при трудностях стыковки [2].
Указанный АНПА является наиболее близким по технической сущности к заявляемому устройству и принят в качестве прототипа.
Недостатками прототипа являются: отсутствие у малого модуля рабочих манипуляторов, сложность повторной стыковки с носителем после сброса г/а маяка, вероятность недостоверной классификации объекта, возможность потери малого аппарата при нештатной ситуации и отсутствие прямой трансляции видеосигнала оператору с изображением затонувшего объекта, а, следовательно, невозможность его опознания «онлайн».
Задачей предполагаемого изобретения является создание конструкции многофункционального составного АНПА для выполнения подводных работ путем самостоятельного поиска затонувшего объекта аппаратом-носителем с последующим обследованием обнаруженного объекта и выполнением на нем работ манипуляторами привязного рабочего аппарата, крепящегося на ложементах под корпусом аппарата-носителя.
Задача решается тем, что известный автономный необитаемый подводный аппарат, включающий обтекаемый корпус, который оснащен движителями, аккумуляторными батареями, средствами навигации и поиска затонувших объектов, а сверху на корпусе закреплен на двух опорах малогабаритный автономный аппарат, оснащенный гидролокатором и акустическим маркером, отличающийся тем, что под корпусом автономного необитаемого аппарата-носителя на ложементах с захватами закреплен рабочий телеуправляемый по волоконно-оптическому кабелю аппарат, который оснащен видеокамерами и рабочими манипуляторами, при этом лебедка с волоконно-оптическим кабелем размещена в нижней части корпуса аппарата-носителя, а сверху на корпусе автономного аппарата-носителя закреплен обтекаемый антенный модуль для радиобуя, в котором также установлена лебедка с кабелем, а всплывающий радиобуй с аппаратурой управляющей линии связи и блоком спутниковой навигации подключен к жому кабелю.
Новыми отличительными признаками составного АНПА являются:
- трансформируемая конструкция, включающая АНПА-носитель с пристыкованным рабочим аппаратом и буксируемый радиобуй;
- наличие нескольких (более двух) манипуляторов на телеуправляемом рабочем аппарате;
- дистанционное управление и контроль составного АНПА оператором;
- многофункциональность составного АНПА (автономный поиск объекта, его обследование, применение манипуляторов привязного НПА, ретрансляция информации в реальном масштабе времени и оперативная коррекция работ);
- возможность работы в составе группы составных АНПА, осуществляя поиск «стаей».
Данные отличительные признаки обеспечивают достаточную компактность конструкции составного аппарата при его высокой многофункциональности и возможности выполнения текущих указаний оператора по каналу связи через радиобуй. В том числе на проведение необходимых работ манипуляторами, которых на рабочем аппарате может быть несколько (до 2-х на каждом борту), используемых как для удержания рабочего НПА у объекта, так и для проведения непосредственных работ.
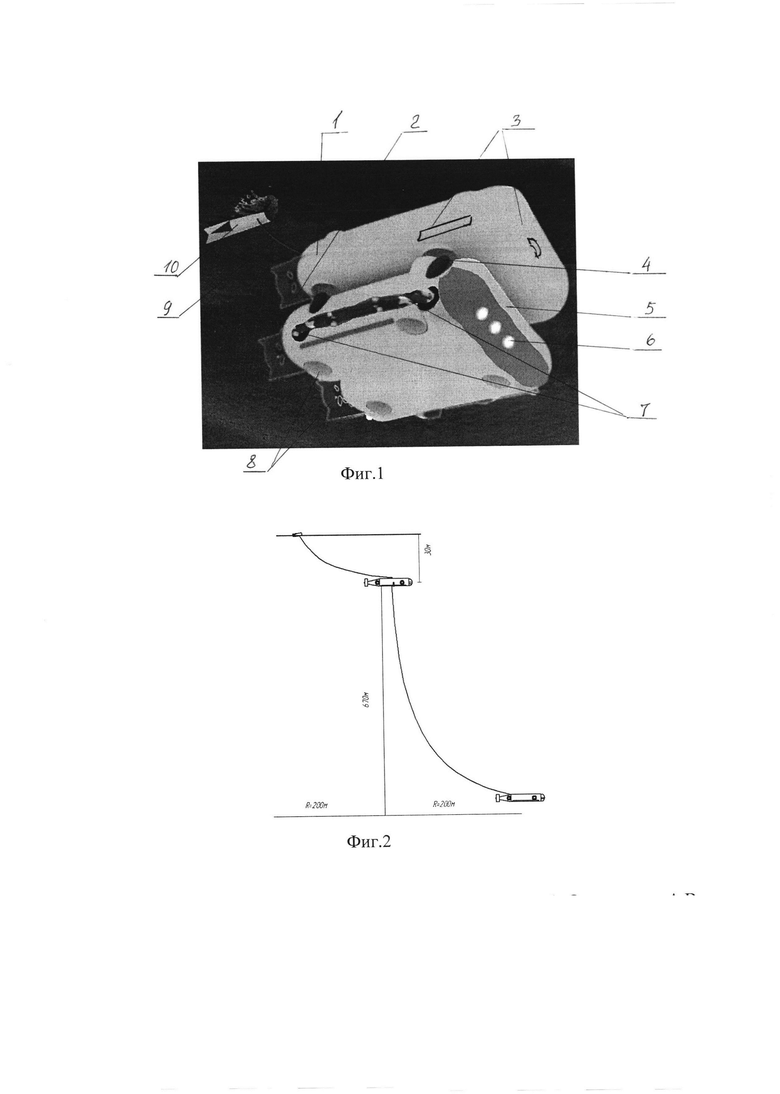
Конструкция составного автономного необитаемого подводного аппарата представлена на фиг. 1.
К нижней части корпуса АНПА-носителя 1, оснащенного движителями 2 и средствами поиска 3, с помощью малогабаритной лебедки с волоконно-оптическим кабелем, размещенной в корпусе носителя, а также с помощью ложементов с захватами 4, крепится телеуправляемый рабочий НПА 5, оснащенный гидролокатором и видеокамерами 6 для обследования объектов и контроля работы манипуляторов 7 и движительным комплексом 8. При этом сверху на корпусе АНПА-носителя закреплен обтекаемый антенный модуль, в котором размещены лебедка с вьюшкой и всплывающий к поверхности на антенном кабеле 9 радиобуй 10.
Составной автономный необитаемый подводный аппарат работает следующим образом.
Назначением составного АНПА является самостоятельный поиск в районе с последующим выполнением необходимых подводно-технических работ. Составной АНПА спускается за борт, проверяется канал связи и АНПА заглубляется под воду. При этом антенный буй выпускается на поверхность (фиг 2). Используя движители АНПА-носителя, составной аппарат выдвигается в назначенную точку, прибыв в которую, сверяет свое место по данным GPS/ГЛОНАСС и включает бортовую поисковую гидроакустическую аппаратуру. Оператор постоянно контролирует место составного АНПА и текущую обстановку по линии связи через антенный буй, осуществляя дистанционное управление или коррекцию галсов действующего по программе аппарата-носителя, а также рабочего аппарата. В назначенной точке аппарат-носитель производит гидроакустический поиск объекта, передавая текущую информацию оператору на судне в реальном масштабе времени. Поисковые галсы с применением гидроакустических средств обнаружения аппарат-носитель осуществляет на небольшом заглублении (десятки метров) для исключения возможности запутывания при маневрировании кабельной линии выпущенного радиобуя. С получением контактов, классифицируемых операторами как достоверные, производится их нанесение на карту и электронный планшет. Затем начинается обследование полученных контактов. В точке полученного контакта осуществляется отделение телеуправляемого по волоконно-оптическому кабелю рабочего НПА от захватов ложементов на корпусе АНПА-носителя. Используя гидролокатор привязного рабочего НПА, оператор подводит аппарат к объекту на дальность действия видеокамеры и классифицирует его. После этого, используя манипуляторы (кормовые для крепления за объект), осуществляются необходимые работы двумя манипуляторами в носовой части рабочего аппарата.
Технико-экономическое преимущество предложенного составного автономного необитаемого подводного аппарата по сравнению с прототипом заключается в том, что он позволяет осуществлять эффективное выполнение не только поиска, но и подводно-технических работ с подбором фрагментов объекта манипуляторами телеуправляемого НПА в удаленном районе под непосредственным контролем оператора.
Литература.
1. Каталог подводных военных роботизированных аппаратов: M.-URL:http://robotrends.ru/robopedya/podvodnie-voernye-apparaty (дата обращения 23.09.2020). - Текст электронный.
2. Илларионов Г.Ю. Подводные роботы в минной войне / Г.Ю. Илларионов, К.С. Сиденко, В.В. Сидоренков. - Калининград: - ОАО «Янтарный берег», 2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2018 |
|
RU2735447C2 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2709059C1 |
| СИСТЕМА ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2659314C2 |
| СПОСОБ И УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2655592C1 |
| СПОСОБ ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2668494C2 |
| ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2650298C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| УСТРОЙСТВО ОПЕРАТИВНОГО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ В АКВАТОРИЯХ МИРОВОГО ОКЕАНА | 2012 |
|
RU2522168C2 |
| СПОСОБ ОБСЛЕДОВАНИЯ ЗАТОНУВШЕГО ОБЪЕКТА НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ НА ТЕЧЕНИИ | 2011 |
|
RU2510354C2 |
Изобретение относится к области средств освоения мирового океана и поиска затонувших объектов. Предложен составной автономный необитаемый подводный аппарат, включающий обтекаемый корпус, который оснащен движителями, аккумуляторными батареями, средствами навигации и поиска затонувших объектов, при этом под корпусом автономного необитаемого аппарата-носителя на ложементах с захватами закреплен рабочий телеуправляемый по волоконно-оптическому кабелю аппарат, который оснащен видеокамерами и рабочими манипуляторами, при этом лебедка с волоконно-оптическим кабелем размещена в нижней части корпуса аппарата-носителя, а сверху на корпусе автономного аппарата-носителя закреплен обтекаемый антенный модуль для радиобуя, в котором также установлена лебедка с кабелем, а всплывающий радиобуй с аппаратурой управляющей линии связи и блоком спутниковой навигации подключен к этому кабелю. Технический результат заключается в повышении эффективности и производительности поисково-исследовательских и подводно-технических работ в широком диапазоне глубин. 2 ил.
Составной автономный необитаемый подводный аппарат, включающий обтекаемый корпус, который оснащен движителями, аккумуляторными батареями, средствами навигации и поиска затонувших объектов, отличающийся тем, что под корпусом автономного необитаемого аппарата-носителя на ложементах с захватами закреплен рабочий телеуправляемый по волоконно-оптическому кабелю аппарат, который оснащен видеокамерами и рабочими манипуляторами, при этом лебедка с волоконно-оптическим кабелем размещена в нижней части корпуса аппарата-носителя, а сверху на корпусе автономного аппарата-носителя закреплен обтекаемый антенный модуль для радиобуя, в котором также установлена лебедка с кабелем, а всплывающий радиобуй с аппаратурой управляющей линии связи и блоком спутниковой навигации подключен к этому кабелю.
| МОДУЛЬНЫЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2017 |
|
RU2667674C1 |
| RU 2012151421 A, 10.06.2014 | |||
| УНИВЕРСАЛЬНАЯ САМОХОДНАЯ СПУСКАЕМАЯ СИСТЕМА ОБСЛЕДОВАНИЯ И РЕМОНТА ОБЪЕКТОВ ГИДРОТЕХНИЧЕСКОЙ ИНФРАСТРУКТУРЫ | 2011 |
|
RU2468960C1 |
| US 2018251199 A1, 06.09.2018 | |||
| US 2019084658 A1, 21.03.2019. | |||

