Изобретение относится к построению самоходных принтеров.
Известен [1] портативный полуавтоматический принтер и способ его ориентации. Работает только при ручном перемещении с опорой на ролик по одной оси. Принтер может корректно работать, включает печатающий узел, который считывая ранее напечатанное, позволяет использовать листы разных форматов, но может печатать только этикетки шириной не более длины головки принтера, что является существенным недостатком.
Известен [2] самоходный принтер на рамке, по которой печатающий узел перемещается по одной оси, а по другой передвигает рамку на массивном ролике. По обеим осям предусмотрен реверс. Этот принтер может печатать плакаты большого формата, но имеет большие габариты, массу, энергопотребление и сложную механику.
Известен [3,4] компактный самоходный принтер, допускающий движение с поворотами, но при работе возникают накапливающиеся ошибки из-за проскальзывания колес и разных диаметров ведущих колес. Поэтому навигация по одометру (расчет пройденной траектории) не достаточна, т.к. требуется точность порядка 0,1-0,3 мм.
Известен [5] способ навигации (определение местоположения) в помещениях системы комнатного GPS «Indoor GPS» ф. Marvelmind robots, использующая стационарные ультразвуковые (УЗ) маяки, управляемые по радио. Положение мобильного робота рассчитывается на основе измерений времени задержки прихода ультразвукового (УЗ) сигнала от стационарных маяков на основе расчета геометрии треугольников. Этот способ требует не менее 3-х маяков и имеет высокую стоимость. «Indoor GPS» не подходит для навигации принтера т.к. имеет низкую точность: ошибка >2-3 cm. Аналогичный способ [6] применяется в водной среде.
Известен способ [7], в котором управляющий сигнал передается от принтера и принимается маяками, а маяк передает сигнал, который принимает принтер. Измеряются задержки сигнала от маяков до принтера, по задержке вычисляются расстояния до маяков и рассчитываются координаты. Данный способ при использовании для принтера имеет большие затраты и электропотребление, низкие быстродействие и точность. Он требует стабильных генераторов на маяках, а длительность передачи должна учитывать максимальную дальность плюс время на автоматическую регулировку усиления (АРУ) и время на автоподстройку частоты (АПЧ).
Наиболее близкими к предлагаемым являются способ [7] и устройства [3, 5] (прототипы).
Цель изобретения (технический результат) - повышение точности и быстродействия, уменьшение аппаратных затрат и энергопотребления.
Технический результат достигается тем, что:
• оба маяка устанавливаются вне рабочей зоны и вдоль ее границы, в управляющем сигнале последовательно передаются первая команда с номером выбранного маяка, синхросигнал и вторая команда, выбранный маяком после декодирования первой команды до декодирования второй команды передает сигнал в виде немодулированной несущей в ультразвуковом диапазоне, для каждого направления с момента после передачи первой команды до начала приема сигнала принтером определятся число периодов опорной частоты, потом измеряются фазы относительно опорной частоты, после выполнения фазовых измерений сигнала с выбранного маяка от принтера передается вторая команда, задержка сигнала от маяка до принтера определяется в единицах периода опорной частоты как сумма числа целых периодов и разности фаз, деленной на 2π, при вычислении выбирается координаты в рабочей зоне;
• задержка определяется для суммарного сигнала приемных преобразователей принтера;
• для двух приемных преобразователей принтера, которые ориентированы на выбранный маяк, определяются две задержки сигнала от выбранного маяка, по двум задержкам рассчитывается расстояние до центра системы приемных преобразователей принтера и угол поворота принтера;
• уровень сигнала, передаваемого от маяка, устанавливается в зависимости от ожидаемого расстояния до маяка и (или) уровня принимаемого сигнала, при этом в первой команде передается указание для установки уровня передачи сигнала маяком;
• управляющий сигнал (УС) передается на маяки по оптике или по радио;
• принтер содержит генератор, оптический передатчик УС, причем приемник содержит сенсоры, усилители сенсоров, коммутатор, D-триггер, два усилителя и два фильтра опорного сигнала, компаратор, RS-триггер, счетчик приемника и квадратурный измеритель разности фаз, содержащий два умножителя, два фильтра нижних частот (ФНЧ) и два аналогово-цифрового преобразователя (АЦП), каждый сенсор соединен с входом соответствующего усилителя сенсоров, выход которого подключен к соответствующему входу коммутатора, первый выход коммутатора соединен с первыми входами двух умножителей, выходы умножителей соединены попарно с входами ФНЧ, выходы которых подключены к входам АЦП, выходы которых подключены к интерфейсу процессора, вторые входы умножителей подключены к выходам фильтров, входы фильтров соединены попарно соответственно с выходами усилителей, входы усилителей соединены попарно с D-входом и выходом D-триггера, второй выход коммутатора соединен с входом компаратора, выход компаратора соединен с S-входом RS-триггера, выход RS-триггера соединен с СЕ-входом счетчика, причем оптический передатчик содержит регистр сдвига, счетчик, сумматор по модулю 2, усилитель передатчика и светодиоды, С-вход и выход старшего разряда регистра сдвига соединены попарно с входами сумматора по модулю 2, выход которого подключен к входу усилителя передатчика, выход которого соединен со светодиодами, а выход переноса счетчика соединен с СЕ-входами регистра сдвига и счетчика, R-входом RS-триггера и R-входом счетчика приемника и интерфейсом процессора, который подключен к выходам счетчика приемника, к L-входам и D-входам регистра сдвига и счетчика, первый выход генератора соединен с D-входом D-триггера, С-входами и D-входами счетчика приемника, регистра сдвига и счетчика, а второй выход генератора соединен с С-входом D-триггера;
• принтер содержит печатающий узел, содержащий электромагнит и держатель сменных стержней: шарикового, гелевого, фломастера или карандаша;
• передатчик маяка содержит ключ, фильтр низких частот (ФНЧ), усилитель и регистр сдвига, приемник содержит инфракрасный диод и дешифратор команд, причем вход и один выход дешифратора команд соединены с соответствующими входами ключа передатчика, выход ключа соединен с входом ФНЧ, выходы регистра соединены с управляющими входами усилителя, вход и выход усилителя соединены с выходом ФНЧ и ультразвуковым излучателем соответственно, процессор соединен с входами регистра, выходами и входом дешифратора команд.
Группа изобретений связана общим замыслом и удовлетворяет требованию единства изобретения, т.к. принтер и маяк являются устройствами для осуществления предложенного способа. При анализе уровня техники и новизны заявляемых объектов не обнаружены аналоги с совокупностью существенных признаков. Следовательно, описанное техническое решение соответствует критерию "новизна".
На фиг. 1 представлена временная диаграмма сигналов, а на фиг. 2 и 3 - геометрические эскизы, поясняющие способ. Функциональные схемы принтера приведены на фиг. 4 и 5. а маяка - на фиг. 6.
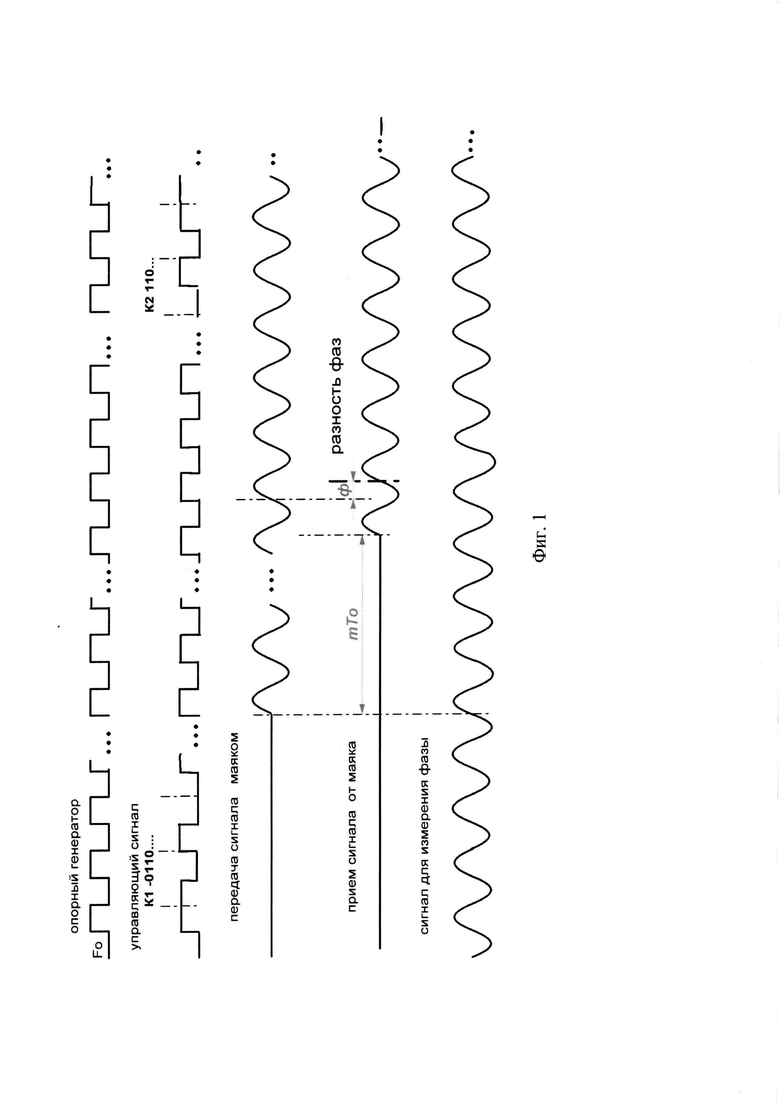
На временной диаграмме (фиг. 1) приведены сигналы для одного направления:
• точками обозначены разрывы по оси времен, в которых сигнал изменяется;
• опорные импульсы от генератора и гармонический сигнал для измерения фазы синхронны;
• несущая УС не показана. Задержка передачи по радио (оптике) принята нулевой, т.к. она меньше измеряемой ≈ в 880 тысяч раз. Можно считать, что передаваемый и принятый УС синхронны;
• команды К1 и К2 передаются с помощью фазовой манипуляции.
После измерения задержки (числа периодов и фазы) время распространения сигнала Тр от маяка определяется по формуле:

где Т0 - период опорной частоты Fo, (Т0=1/F0);
m - целое число периодов Т0;
ϕ - разность фаз, на фиг. 1 ϕ ≈ π/3;
Тм - время обработки УС (демодуляция и декодирование), на фиг. 1 принято, что Тм=0.
Дальность s определяется по формуле:

где V - скорость распространения сигнала, для ультразвукаУ=340 м/с.
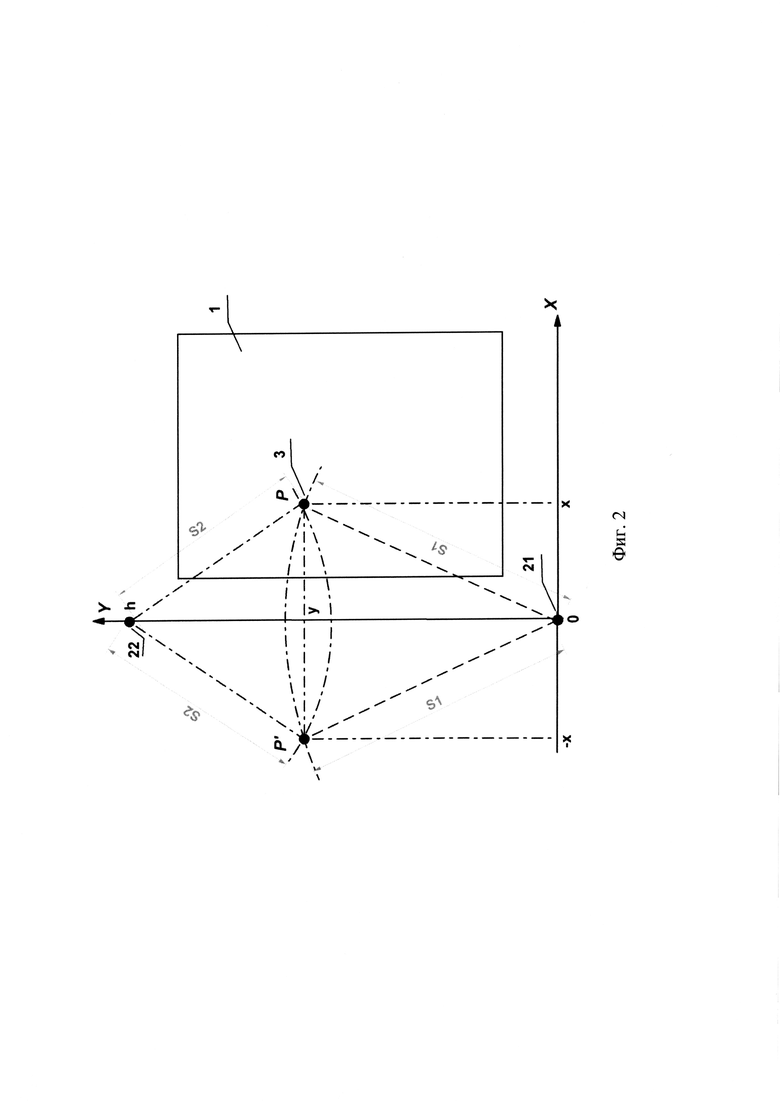
На фиг. 2 первый и второй маяки 21 и 22 установлены вдоль границы рабочей зоны (листа) 1. Расстояния от принтера 3 до маяков S1 и S2 связаны с координатами принтера х и у:


где х и у - координаты принтера Р;
h - расстояние между маяками.
Вычитая из (3) (4) получим:


Из двух решений (5) и (6), выбирается положение Р в рабочей зоне (х>0).
Таким образом, с помощью двух маяков определяются координаты принтера.
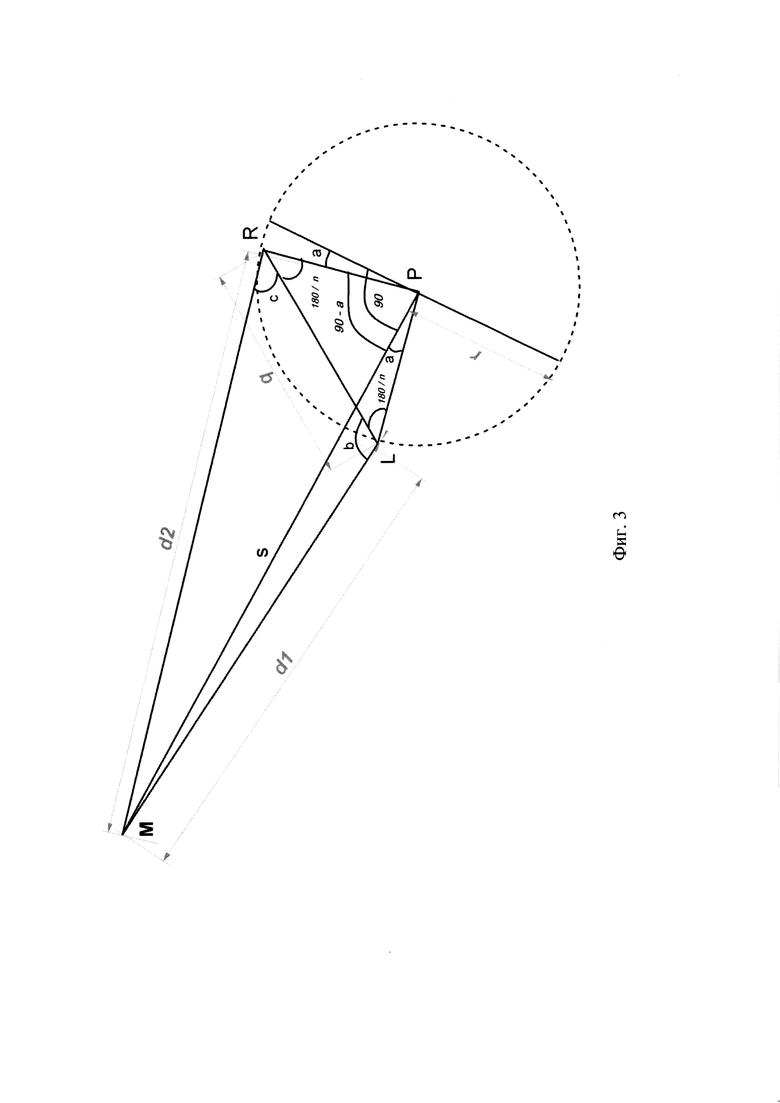
Принтер по УЗ и ИК должен иметь круговые диаграммы направленности, поэтому при использовании серийных УЗ сенсоров и светодиодов с шириной диаграммы направленности 90° - 120° потребуется n сенсоров и n светодиодов (n=3. 4,…). Поэтому необходимо учесть конечные размеры системы УЗ сенсоров и угол поворота принтера.
Будем полагать, что сенсоры расположены в п вершинах многоугольника. На фиг. 3 изображена грань RL многоугольника. Использованы следующие обозначения:
М - вершина треугольника LMR, в которой расположен маяк;
Р - центр окружности, описанной вокруг многоугольника;
r - радиус окружности, описанной вокруг многоугольника;
a - угол в вершине Р треугольника PLM;
b и с - углы в вершинах L и R треугольника LMR;
s - расстояние от маяка до центра окружности;
90 и 180/n - углы в градусах.
На фиг. 3 диаметр окружности, описанной вокруг многоугольника, проведенной через точку Р, перпендикулярен отрезку РМ.
Угол b определятся по теореме косинусов:

где d1 и d2 - измеренные расстояния от маяка до сенсоров.
Длина грани LR q:

Угол с определятся по теореме синусов:

Углы при вершинах L и R треугольника PLM больше, чем углы b и с на π/n. По теореме синусов для треугольников PLM и PMR d1 / sin a=s / sin(b+π/n) и d2 / sin (π/2 - a)=s / sin(b+π/n).
Учитывая, что sin (π/2 - a)=cos a получим:



Расстояние s определяется:

После уточнения значения s до другого маяка, можно определить угол поворота принтера (его нулевой грани) относительно оси листа 1 как сумма: угла a, arcsin (x/s1) [или - arcsin (x/s2)] и угла поворота грани L относительно нулевой грани.
Если значения углов в вершинах L и R треугольника PLR π/n заменить на (2π-p) / 2, где p - фактический угол в вершине Р треугольника PLR, то вычисления по формулам (9-15) будут справедливы для произвольных многоугольников.
При небольших размерах листа и использовании одометра независимое измерение двух целых периодов mT0 не обязательно, т.к. достаточно измерить только один раз целое число периодов Т0 и две разности фаз, что позволит повысить быстродействие для одноканального измерителя фаз.
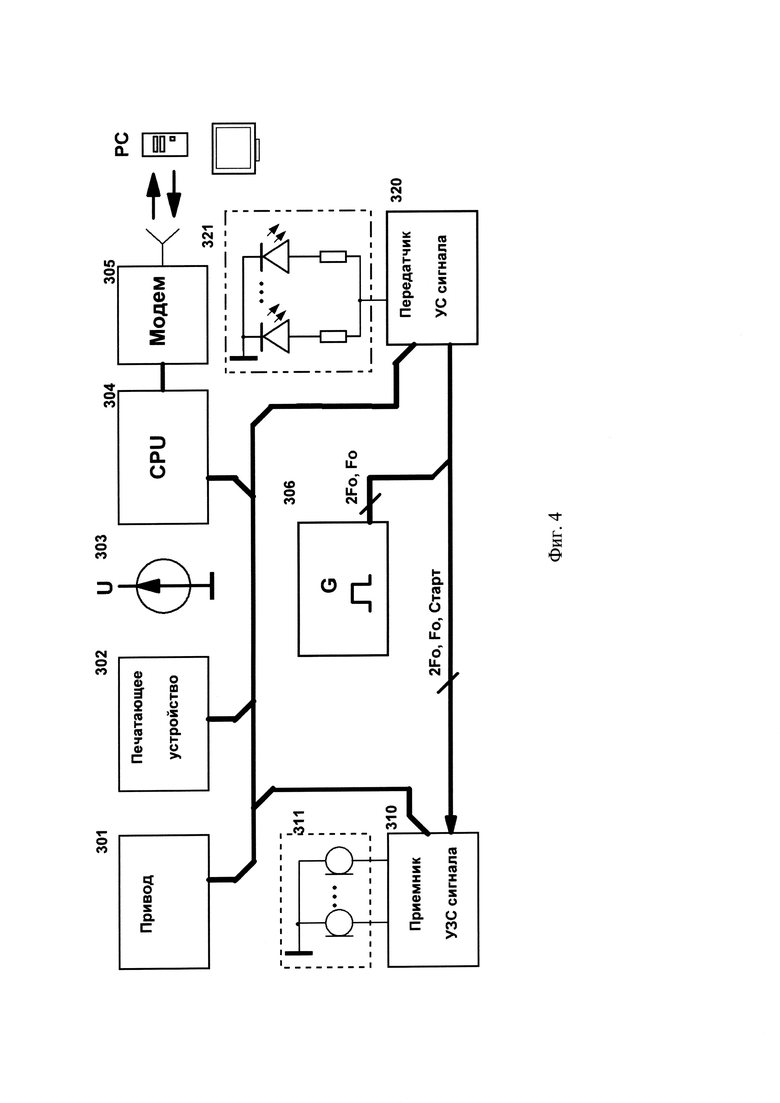
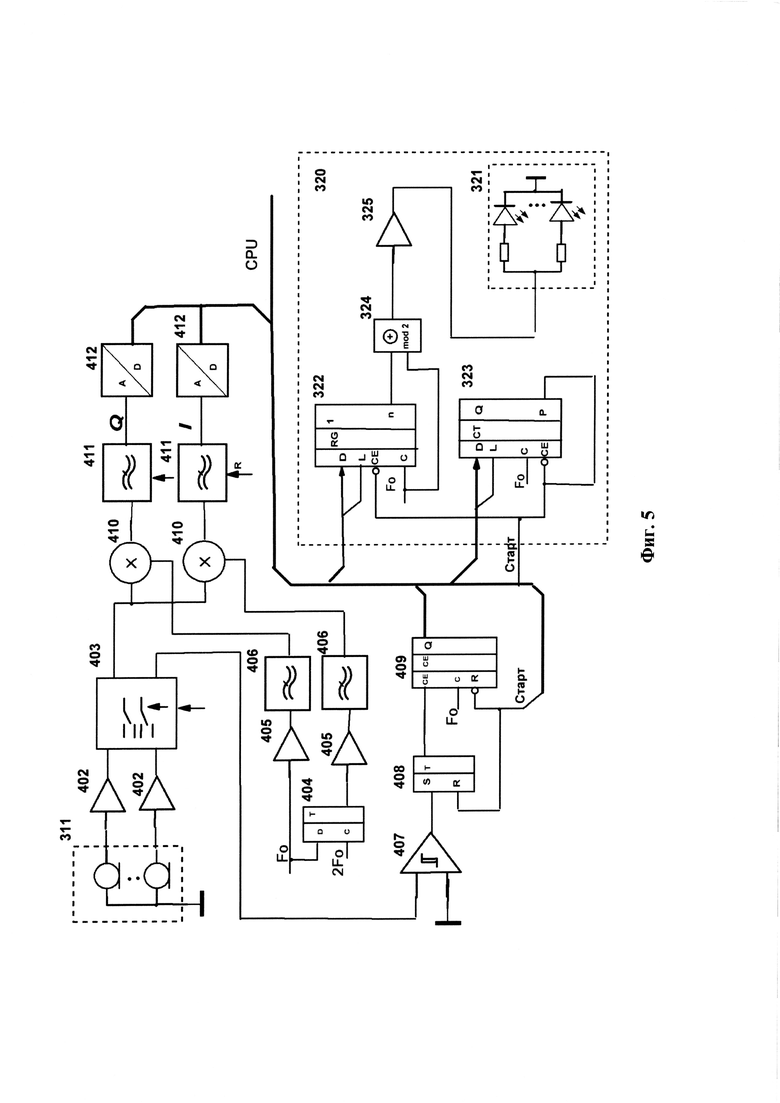
Принтер (фиг. 4), содержит привод 301, печатающее устройство 302, источник питания 303, процессор 304, модем 305 и ультразвуковой приемник 310, а также генератор 306, передатчик УС 320. Процессор 304 соединен с этими частями через интерфейс. Приемник 310 содержит сенсоры 311, усилители сенсоров 402, коммутатор 403, D-триггер 404, два усилителя 405 и два фильтра 406, компаратор 407, RS-триггер 408, счетчик 409 и квадратурный измеритель разности фаз, содержащий два умножителя 410, два ФНЧ 411 и два АЦП 412 (фиг. 5). Каждый сенсор 311 соединен с входом соответствующего усилителя сенсоров 402, выход которого подключен к соответствующему входу коммутатора 403, первый выход коммутатора 403 соединен с первыми входами двух умножителей 410, выходы умножителей 410 соединены попарно с входами ФНЧ 411. Выходы ФНЧ 411 подключены к входам АЦП 412. Выходы АЦП 412 подключены к интерфейсу процессора. Вторые входы умножителей 410 подключены к выходам фильтров 406, входы которых соединены попарно соответственно с выходами усилителей 405, входы усилителей 405 соединены попарно с D-входом и выходом D-триггера 404. Второй выход коммутатора 403 соединен с входом компаратора 407, выход которого соединен с S-входом RS-триггера 408, выход RS-триггера соединен с СЕ-входом счетчика приемника 409. Передатчик УС 320 содержит регистр сдвига 322, счетчик 323, сумматор (по модулю 2) 324, усилитель передатчика 325 и светодиоды (ИК-диоды) 321, С-вход и выход старшего разряда регистра сдвига 322 соединены попарно с входами сумматора (по модулю 2) 324. Выход сумматора 324 подключен к входу усилителя 325, выход которого соединен со светодиодами 321. Выход переноса (заема) счетчика 323 соединен с СЕ-входами регистра сдвига 322 и счетчика 323, R-входом RS-триггера 408, R-входом счетчика 409 и интерфейсом процессора, который подключен к выходам счетчика 409, L-входам и D-входам регистра сдвига 322 и счетчика 323. Первый выход генератора 306 соединен с D-входом D-триггера 404, счетчика 409, регистра сдвига 322 и счетчика 323. Второй выход генератора 306 соединен с С-входом D-триггера 404.
Сигналы на L-входе и СЕ-входе регистра сдвига и счетчика 323 разрешают соответственно загрузку состояний с шины D-входов и сдвиг (счет) по фронту сигнала на С-входе. Сигнал на СЕ-входе счетчика приемника 409 разрешает счет и сброс этого счетчика.
Функционирование принтера осуществляется в соответствии с описанным способом. Предварительно, до передачи команды, процессор по шине данных загружает в регистр сдвига 322 код команды и в счетчик 323 число бит в команде. D-триггер обеспечивает сдвиг опорных сигналов на 90° на частоте УЗ (40 кГц), а фильтры 405 подавляют гармоники F0. Реверсивный счетчик 323 на частоте F0 отсчитывает заданное число и формирует на выходе заема (переноса) сигнал «Старт», который останавливает сдвиг и счет. Сигнал «Старт» разрешает в счетчике 409 подсчет числа периодов с помощью компаратора 407 и RS -триггера 408. Счет остановится по первому принятому опорному сигналу. Процессор считывает коды счетчика 409 и двух АЦП 412.
К составным частям принтера предъявляются следующие требования:
• привод 301 с двигателем и управляемыми колесами, может быть выполнен с электродвижителем [8];
• узел светодиодов 311 имеет круговую диаграмму направленности;
• процессор 304 с памятью может работать на частоте не кратной F0;
• модем 305 предназначен для радио связи с внешним компьютером;
• опорный генератор 306 работает на частоте кратной F0 и должен иметь точность порядка 10-4 - 10-5, может иметь встроенный делитель;
• узел УЗ сенсоров 311 имеет круговую диаграмму направленности;
• ФНЧ 411 могут иметь сброс от процессора 304;
• коммутатор 403 может иметь управление от процессора 304 (в соответствии со способом) для выбора сенсоров по результатам расчетов.
Разность фаз ϕ определяется по формуле:

где I и Q - значения напряжений на выходах ФНЧ 411.
Измерение ϕ может выполняться за несколько целых периодов Т0.
Линейная ошибка Δs определяется по формуле:

где Δϕ - угловая ошибка.
При УЗ 40 кГц (период Т0=25 мкс) сигнал на скорости V=340 м/с проходит по воздуху за один период 8,5 мм. Угловой ошибке Δϕ=±π/45=±4° соответствует максимальная линейная ошибка Δs≈±0.1 мм, а средняя квадратичная линейная ошибка будет в 3 раза меньше.
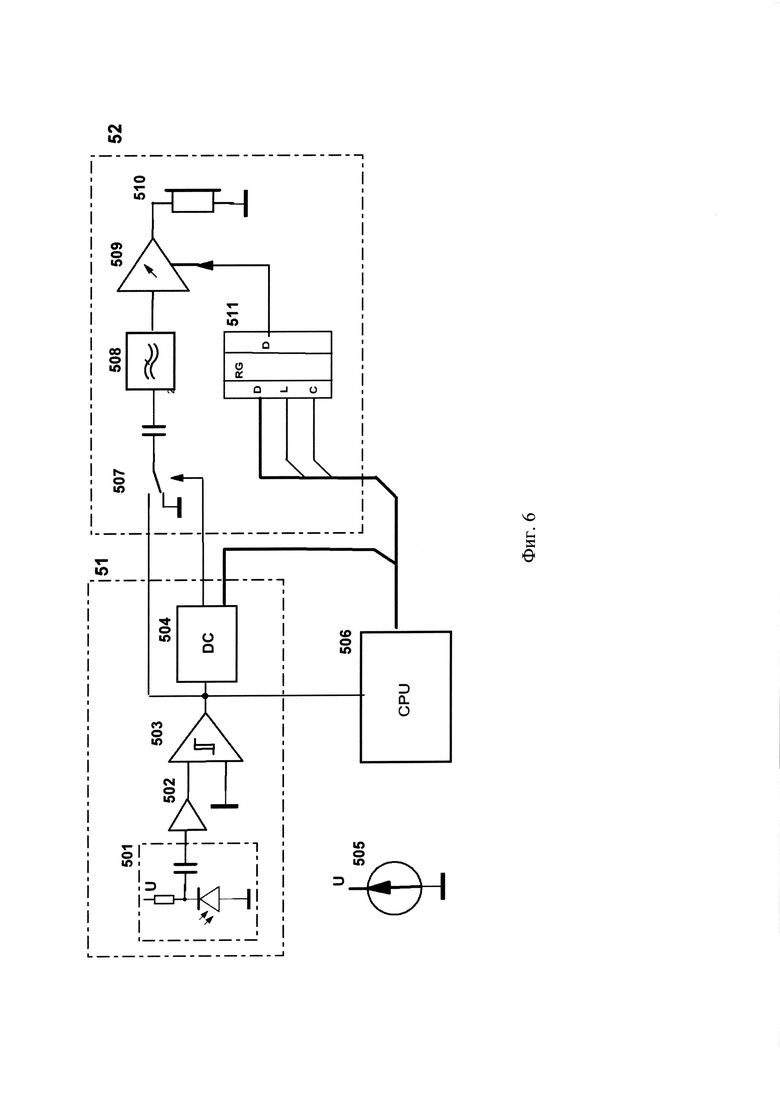
Маяк (фиг. 6) содержит приемник 51, передатчик 52, источник питания 505 и процессор 506, причем передатчик 52 содержит УЗ 510, ключ 507, ФНЧ 508, усилитель 509, регистр 511. Приемник 51 содержит инфракрасный (ИК) диод 501 и дешифратор команд 504. Вход и один выход дешифратора команд 504 соединены с соответствующими входами ключа 507 передатчика 52, выход ключа 507 соединен с входом ФНЧ 508, выходы регистра 511 соединены с управляющими входами усилителя 509. Вход и выход усилителя 509 соединены с выходом ФНЧ 508 и УЗ излучателя 510 соответственно, процессор 506 соединен с входами регистра 511, с выходами и входом дешифратора команд 503. Кроме того, на фиг. 6 в приемнике маяка 51 приведены, как возможный вариант реализации, усилитель 502 и компаратор 503.
Работа маяка соответствует способу навигации, при этом к составным частям маяка предъявляются следующие требования:
• ИК диод 501 должен принимать УС в секторе не уже, чем π/2;
• процессор маяка 506 может работать на частоте не кратной F0;
• дешифратор 504 выполняет также функции демодуляции и декодирования;
• регистр 511 хранит коэффициент усиления усилителя 509 при реализации функций п. 4 формулы с целью исключения влияния отражений и эха;
• УЗ излучатель 510 должен работать в секторе не уже, чем π/2.
Измерения углов (разности фаз) вместо времени поступления импульсов обеспечивает повышение точности. Кроме того, исключение из приемопередатчиков принтера и маяка систем АРУ и АПЧ существенно повышает точность и быстродействие, т.к. отсутствуют дополнительные ошибки и не надо ждать окончания переходных процессов в ФНЧ систем АРУ и АПЧ. Использование двух команд К1 и К2 в УС уменьшает время работы передатчика маяка, что обеспечивает снижение энергопотребление.
Передача в оптическом (или в ИК) диапазоне УС обеспечивает высокую электромагнитную устойчивость. Ключ 507 задерживает начало передачи гармонического УЗ сигнала до декодирования первой команды.
Таким образом, предложение отличается высокой точностью и быстродействием и имеет меньшие аппаратные затраты и энергопотребление.
Источники информации:
1. Патент US 5825995 кл. 375/354, 11.05.1996
2. Патент US 6695445 кл. 375/354, 16.07.2002
3. US 2016/03111239 А1, МПК B41J 29/38 27.10.2016
4. Патент US D736312 S D18/50, 16.08.2015
5. www.marvelmind.com/pics/indoor_navigation_system_RUS_08.pdf
6. RU 2285273 С1 МПК G01S 5/18 10.10.2006
7. Патент РФ 2519296 МПК G01S 5/10, 10.06.2014
8. Патент РФ 2728275 МПК Н02К 21/14, 20.07.2020 Бюл. №22
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАБОТЫ САМОХОДНОГО ПРИНТЕРА И ПРИНТЕР | 2021 |
|
RU2777268C2 |
| Многочастотный цифровой фильтр | 1987 |
|
SU1474827A1 |
| СТАРТСТОПНАЯ СИСТЕМА СВЯЗИ | 2009 |
|
RU2396722C1 |
| СПОСОБ РАДИОСИГНАЛИЗАЦИИ И ОБНАРУЖЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2099791C1 |
| Устройство для передачи и приема данных в полудуплексном режиме | 1990 |
|
SU1732485A1 |
| Устройство для обмена информацией | 1986 |
|
SU1336017A1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА ТЕЛЕГРАФНЫХ РАДИОСИГНАЛОВ | 1990 |
|
RU2009615C1 |
| СИСТЕМА ПЕРЕДАЧИ И ОБРАБОТКИ СИГНАЛОВ О СОСТОЯНИИ ОБЪЕКТОВ | 1994 |
|
RU2087036C1 |
| Устройство для обмена информацией | 1983 |
|
SU1198528A1 |
Группа изобретений относится к самоходным принтерам. Технический результат - повышение точности, быстродействия, снижение затрат. Для этого принтер передает 2 команды и сигнал синхронизации. 2 маяка (М) устанавливаются вне и вдоль рабочей зоны (РЗ), М принимает управляющий сигнал (УС) в оптическом диапазоне, декодирует УС и передает гармонику на ультразвуке, уровень устанавливается в зависимости от расстояния. С помощью квадратурного измерителя определяется разность фаз сигналов от М и генератора, выбираются координаты в РЗ. 3 н. и 5 з.п. ф-лы, 6 ил.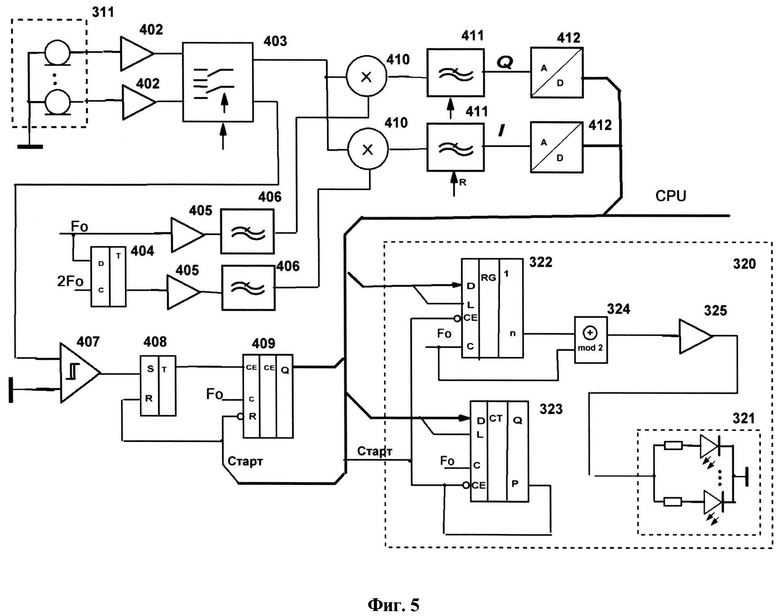
1. Способ навигации принтера, в котором управляющий сигнал передается от принтера и принимается маяками, а маяк передает сигнал, который принимает принтер, измеряются задержки сигнала от маяков до принтера, по задержке вычисляются расстояния до маяков и рассчитываются координаты, отличающийся тем, что оба маяка устанавливаются вне рабочей зоны и вдоль ее границы, в управляющем сигнале последовательно передаются первая команда с номером выбранного маяка, синхросигнал и вторая команда, выбранный маяк после декодирования первой команды до декодирования второй команды передает сигнал в виде немодулированной несущей в ультразвуковом диапазоне, для каждого направления с момента после передачи первой команды до начала приема сигнала принтером определятся число периодов опорной частоты, потом измеряются фазы относительно опорной частоты, после выполнения фазовых измерений сигнала с выбранного маяка от принтера передается вторая команда, задержка сигнала от маяка до принтера определяется в единицах периода опорной частоты как сумма числа целых периодов и разности фаз, деленной на 2π, при вычислении выбирается координаты в рабочей зоне.
2. Способ по п. 1, отличающийся тем, что задержка определяется для суммарного сигнала приемных преобразователей принтера.
3. Способ по п. 1, отличающийся тем, что для двух приемных преобразователей, которые ориентированы на выбранный маяк, определяются две задержки сигнала от выбранного маяка, по двум задержкам рассчитываются расстояние до центра системы приемных преобразователей принтера и угол поворота принтера.
4. Способ по п. 1, отличающийся тем, что уровень сигнала передаваемого от маяка устанавливается в зависимости от ожидаемого расстояния до маяка и (или) уровня принимаемого сигнала, при этом в первой команде передается указание для установки уровня передачи сигнала маяком.
5. Способ по п. 1, отличающийся тем, что управляющий сигнал на маяки передается в оптическом или в радио диапазонах.
6. Принтер, содержащий привод, печатающее устройство, источник питания, процессор, модем и ультразвуковой приемник, причем процессор соединен с этими частями через интерфейс, отличающийся тем, что содержит генератор, оптический передатчик управляющего сигнала, причем приемник содержит сенсоры, усилители сенсоров, коммутатор, D-триггер, два усилителя, два фильтра опорного сигнала, компаратор, RS-триггер, счетчик приемника и квадратурный измеритель разности фаз, содержащий два умножителя, два фильтра нижних частот и два аналогово-цифровых преобразователя, каждый сенсор соединен с входом соответствующего усилителя сенсоров, выход которого подключен к соответствующему входу коммутатора, первый выход коммутатора соединен с первыми входами двух умножителей, выходы умножителей соединены попарно с входами фильтров нижних частот, выходы которых подключены к входам аналогово-цифровых преобразователей, выходы которых подключены к интерфейсу процессора, вторые входы умножителей подключены к выходам фильтров, входы фильтров соединены попарно соответственно с выходами усилителей, входы усилителей соединены попарно с D-входом и выходом D-триггера, второй выход коммутатора соединен с входом компаратора, выход компаратора соединен с S-входом RS-триггера, выход RS-триггера соединен с СЕ-входом счетчика, причем оптический передатчик содержит регистр сдвига, счетчик, сумматор по модулю 2, усилитель передатчика и светодиоды, С-вход и выход старшего разряда регистра сдвига соединены попарно с входами сумматора по модулю 2, выход которого подключен к входу усилителя передатчика, выход которого соединен со светодиодами, а выход переноса счетчика соединен с СЕ-входами регистра сдвига и счетчика, R-входом RS-триггера и входом счетчика приемника и интерфейсом процессора, который подключен к выходам счетчика приемника, L-входам и D-входам регистра сдвига и счетчика, первый выход генератора соединен с D-входом D-триггера, С-входами и D-входами счетчика приемника, регистра сдвига и счетчика, а второй выход генератора соединен с С-входом D-триггера.
7. Принтер по п. 6, отличающийся тем, что содержит печатающий узел, содержащий электромагнит и держатель сменных стержней: шарикового, гелевого, фломастера или карандаша.
8. Маяк, содержащий приемник, передатчик, источник питания и процессор, причем передатчик содержит ультразвуковой излучатель, отличающийся тем, что передатчик содержит ключ, фильтр низких частот, усилитель и регистр, приемник содержит инфракрасный диод и дешифратор команд, причем вход и один выход дешифратора команд соединены с соответствующими входами ключа передатчика, выход ключа соединен с входом фильтра низких частот, выходы регистра соединены с управляющими входами усилителя, вход и выход усилителя соединены с выходом фильтра низких частот и ультразвуковым излучателем соответственно, процессор соединен с входами регистра и с выходами и входом дешифратора команд.
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ | 2012 |
|
RU2519296C1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| US 8291855 B2, 23.10.2012 | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |

