Область техники, к которой относится изобретение
Настоящее изобретение относится к подвижным поверхностям управления полетом летательных аппаратов и к их приводам.
Уровень техники
Летательный аппарат, например, самолет, обычно содержит главную конструкцию (фюзеляж, крылья, неподвижное оперение) и подвижные поверхности управления полетом (элероны, интерцепторы, рули высоты, рули направления…), шарнирно соединенные с конструкцией, чтобы их положением можно было управлять для управления летательным аппаратом. Подвижная поверхность содержит жесткую конструкцию, на которой находится обшивка, образующая кожух подвижной поверхности. Перемещение каждой подвижной поверхности управления полетом в необходимое положение осуществляют при помощи одного или нескольких приводов, имеющих неподвижную часть, установленную в конструкции летательного аппарата, и подвижную часть, соединенную с подвижной поверхностью управления полетом.
На летательных аппаратах все чаще используют электрические приводы, выполненные с возможностью производить механическую работу, когда они получают питание электрической энергией. Такой привод содержит электромеханическое устройство создания усилия, силовую цепь, питающую электрической энергией электромеханическое устройство создания усилия, и цепь управления, которая управляет силовой цепью и которая предназначена для соединения с бортовым вычислительным устройством летательного аппарата. Бортовое вычислительное устройство получает данные от инструментов управления, которыми манипулирует пилот, и от различных датчиков, распределенных в летательном аппарате, и вырабатывает на основании этих данных командные сигналы, передаваемые в цепь управления каждого привода.
Электромеханическое устройство создания усилия, силовая цепь и цепь управления находятся все вместе в нише, выполненной в главной конструкции летательного аппарата.
В некоторых вариантах применения для перемещения одной и той же подвижной поверхности предпочтительно используют два электрических двигателя. Однако приведение в движение подвижной поверхности при помощи двух электрических двигателей создает на подвижной поверхности напряжения, которых не существует при приведении в движение двумя гидравлическими приводами.
Раскрытие сущности изобретения
Изобретение призвано предложить средство для улучшения приведения в движение подвижных поверхностей управления полетом в летательном аппарате.
Согласно изобретению, предусмотрено электромеханическое устройство приведения в движение подвижной поверхности управления полетом, имеющей кожух, шарнирно соединенный с конструкцией летательного аппарата вокруг оси вращения, содержащее:
- по меньшей мере два электрических двигателя для приведения во вращение кожуха вокруг оси вращения,
- силовую цепь и цепь управления для обеспечения питания и управления каждым из двигателей,
- устройство ограничения противодействующих усилий, создаваемых электрическими двигателями.
Согласно предпочтительному варианту осуществления, устройство ограничения содержит цепь обнаружения, выполненную с возможностью определения амплитуды и направления результирующей противодействующих усилий, чтобы обеспечивать корректирующее действие цепей управления двигателями в зависимости от этой результирующей.
Таким образом, двигателями можно управлять, чтобы уменьшить эту результирующую.
Предпочтительно цепь обнаружения связана с тензометрами, которые закреплены на площадке, на которой закреплены статоры двигателей; или тензометры закреплены на стержне, связывающем между собой и во вращении роторы двигателей.
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания неограничивающих частных вариантов осуществления изобретения.
Краткое описание чертежей
Описание представлено со ссылками на прилагаемые чертежи, на которых:
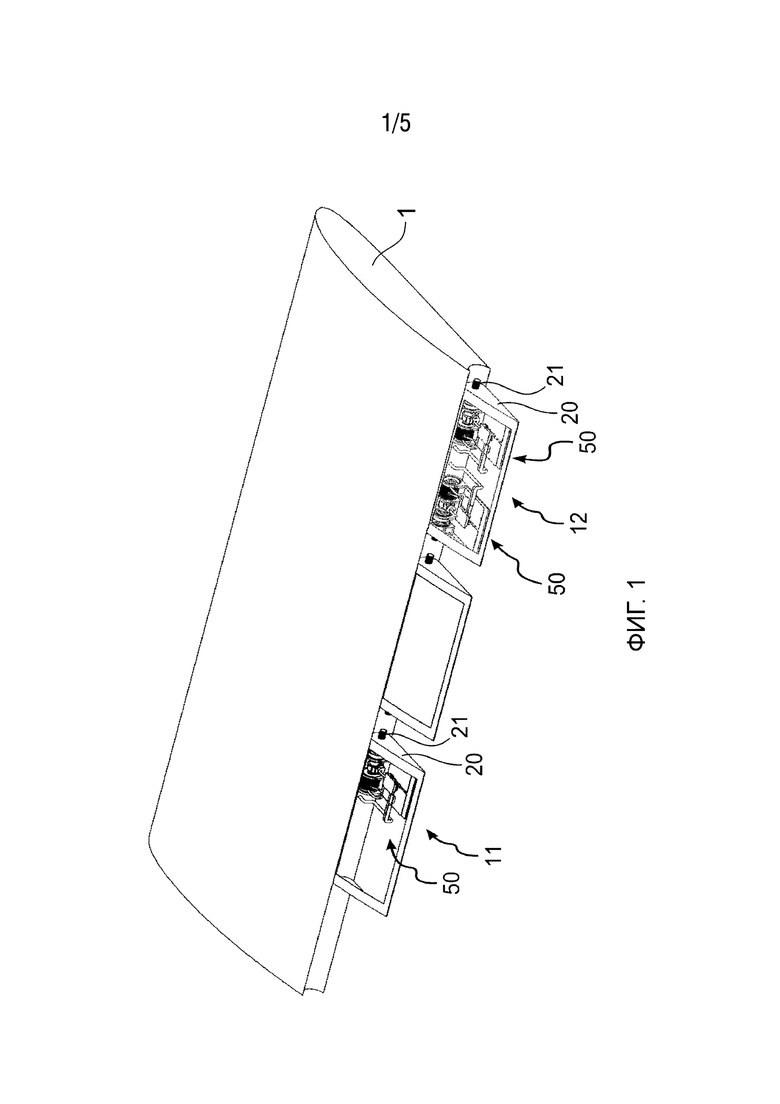
на фиг. 1 схематично показано крыло, оснащенное подвижными поверхностями управления полетом в соответствии с изобретением, вид в перспективе и с частичными вырезами;
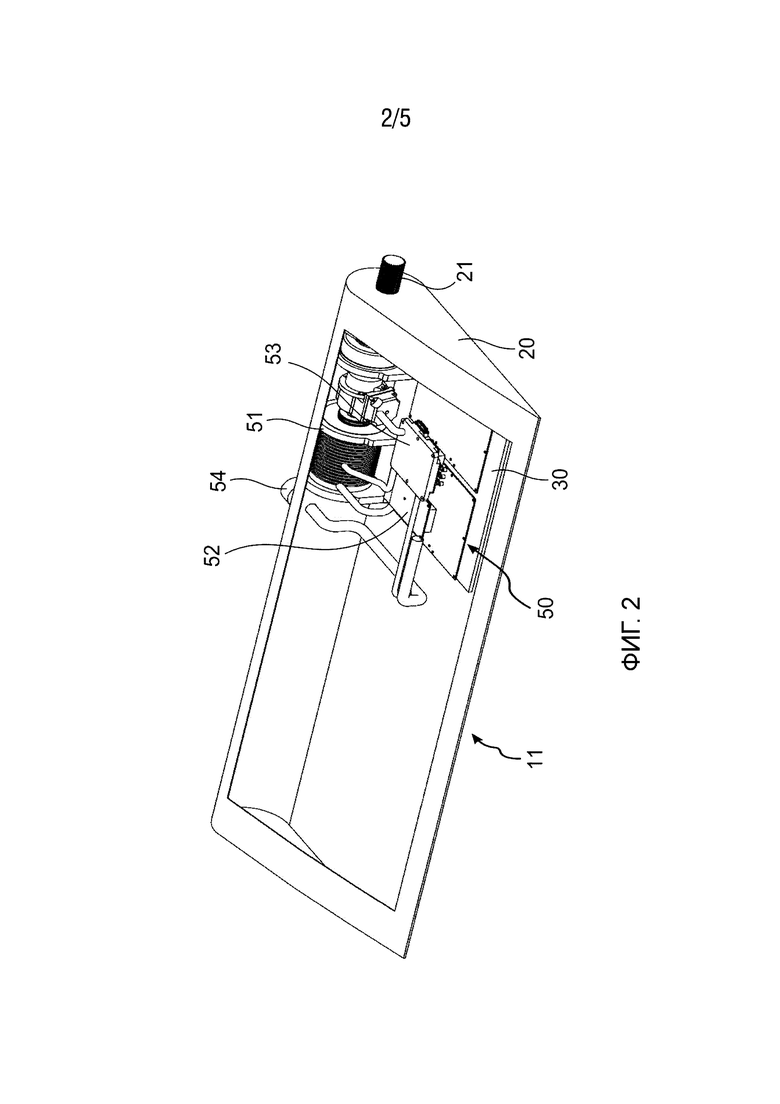
на фиг. 2 схематично показана первая из этих подвижных поверхностей управления полетом, вид в перспективе и с частичным вырезом;
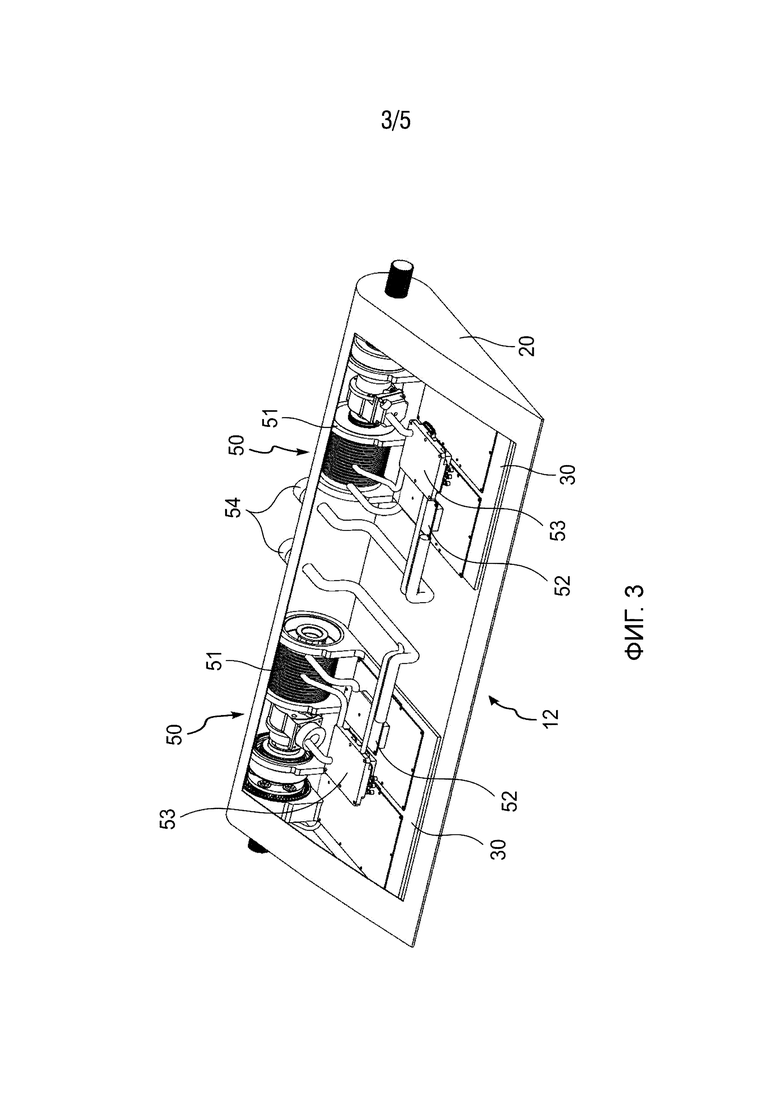
на фиг. 3 схематично показана вторая из этих подвижных поверхностей управления полетом, вид в перспективе и с частичным вырезом;
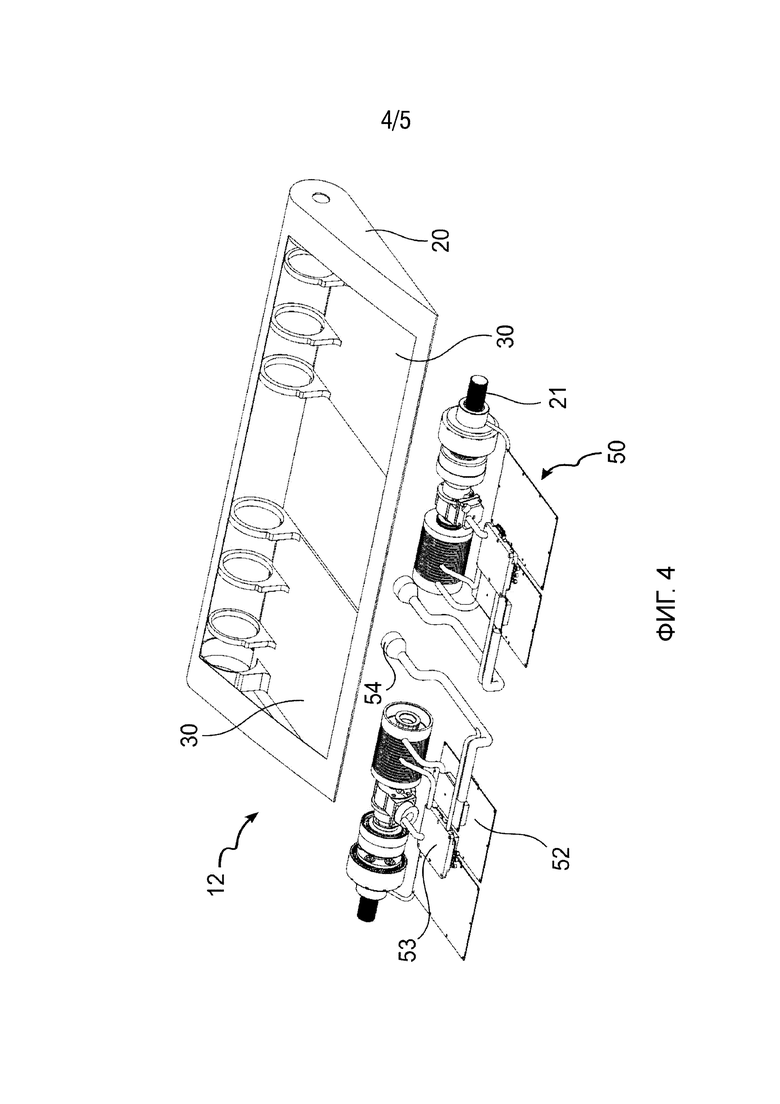
на фиг. 4 схематично показана вторая подвижная поверхность управления полетом, вид в перспективе с пространственным разделением деталей;
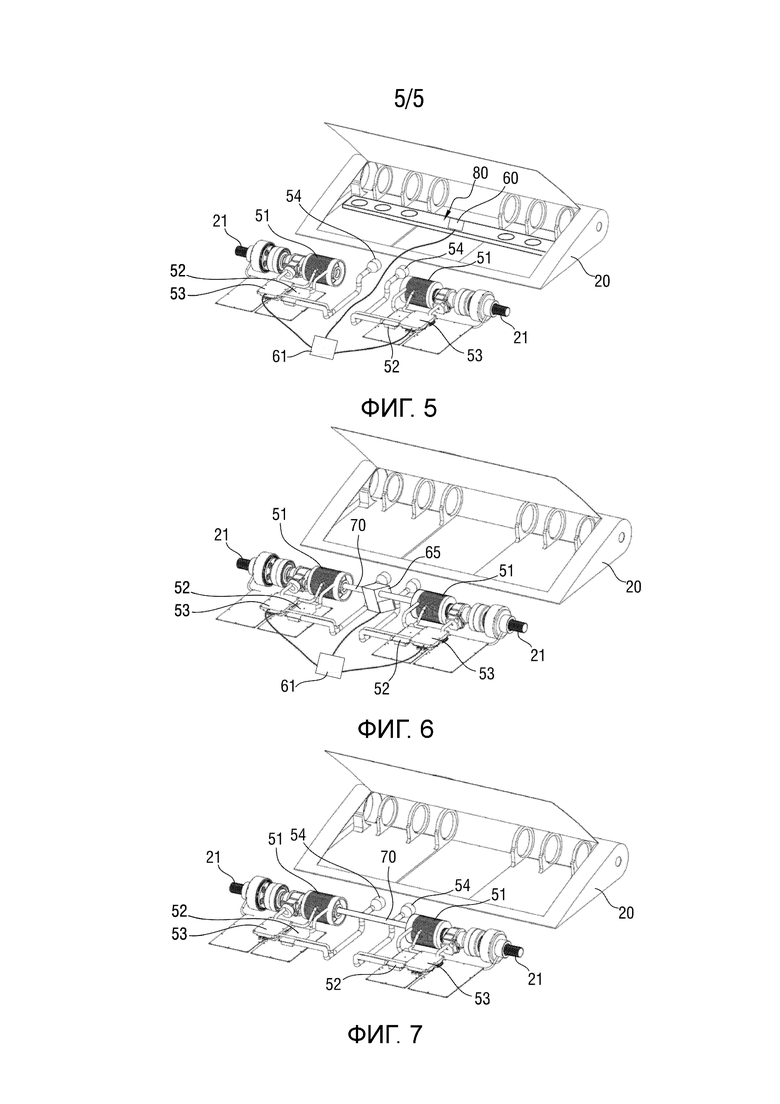
на фиг. 5 показана вторая подвижная поверхность управления полетом, оснащенная устройством согласно первому варианту осуществления, чтобы препятствовать разнонаправленному действию приводов, вид, аналогичный виду на фиг. 4.
на фиг. 6 показано устройство препятствия разнонаправленному действию приводов согласно второму варианту осуществления, вид, аналогичный виду на фиг. 5;
на фиг. 7 показана базовая версия этого второго варианта осуществления, вид, аналогичный предыдущему виду.
Осуществление изобретения
Показанные на фигурах подвижные поверхности управления полетом в соответствии с изобретением представляют собой в данном случае элероны с общими обозначениями 11, 12, шарнирно соединенные с крыльями 1 самолета. Разумеется, изобретение можно применять для других типов подвижных поверхностей управления полетом летательного аппарата, например, для интерцепторов, рулей высоты, рулей направления…
Каждый элерон 11, 12 содержит кожух 20, установленный с возможностью поворота на шарнирной оси 21, в данном случае выполненной в виде двух отдельных коаксиальных отрезков, которые расположены в кожухе 20 и концы которых выступают из кожуха 20. Эти концы закреплены на крыльях без возможности свободного вращения: по этой причине в данном примере указанные концы имеют шлицы, чтобы обеспечивать передачу общего движения. Разумеется, можно использовать и другие элементы блокировки вращения, такие как шпонки или шплинты. Кожух 20 содержит поперечные усиления или нервюры и площадки 30, образующие несущую конструкцию, а также обшивку, закрывающую несущую конструкцию. Несущая конструкция оснащена опорными подшипниками, такими как шарикоподшипники, в которых с возможностью поворота установлена ось 21.
В кожухе 20 элерона 11 установлен привод с общим обозначением 50, а в кожухе 20 элерона 11 установлены два привода 50.
Каждый привод 50 содержит:
- узел двигателя 51, включающий в себя вращающийся электрический двигатель и редуктор, который установлен в кожухе 20 и выходной вал которого соединен с осью 21 в данном случае через зубчатую передачу, чтобы приводить кожух 20 во вращение вокруг оси 21,
- силовую цепь 52 и цепь 53 управления для подачи питания и для управления электрическим двигателем 51,
- датчики, связанные с цепью 53 управления, в частности, чтобы отслеживать угловое положение элерона относительно оси 21.
В данном случае выходной вал узла двигателя 51 является коаксиальным с осью 21, с которой он соединен во вращении. Узел двигателя 51 имеет один или несколько статоров, закрепленных на несущей конструкции элерона, в котором он установлен. Узел двигателя 51 может не иметь редуктора или, наоборот, может содержать редуктор (при этом говорят о трансмиссии “direct-drive” или “gear-drive”).
Цепи 52, 53 тоже находятся в кожухе 20 и соединены электрическими проводами с соединителем 54, выходящим наружу кожуха 20. Соединитель 54 позволяет питать цепи 52, 53 электрической энергией и соединять цепь 53 управления с не показанным вычислительным устройством управления полетом летательного аппарата, управляющим положением летательного аппарата в полете. Вычислительное устройство управления полетом вместе с цепями 53 управления обеспечивает автоматическое регулирование при помощи длинного контура обратной связи на основании заданных значений положения или сближения, которые цепи 53 управления используют для определения заданных значений тока. Вместе с силовыми цепями 52 цепи 53 управления осуществляют автоматическое регулирование при помощи короткого контура обратной связи на основании заданных значений тока, которые силовые цепи 52 используют для питания катушек двигателей 51. Ток питания определяет электрически создаваемый крутящий момент (усилие).
По меньшей мере силовая цепь 52 неподвижно соединена с одной из площадок 30. В данном случае площадки 30 выполнены из теплопроводящего материала и входят в контакт с кожухом 20. В данном случае цепь 53 управления тоже закреплена на площадке 30. Предпочтительно статор или статоры узла двигателя 51 тоже закреплены на площадке 30.
В данном случае площадка 30 оснащена опорными подшипниками, установленными с возможностью вращения на оси 21, и статор электрического двигателя 51 закреплен на площадке 30.
Оба привода элерона 12 синхронизированы, чтобы действовать одновременно одинаковыми усилиями на ось 21. Предпочтительно каждый привод 50 элерона 12 рассчитан таким образом, чтобы самостоятельно перемещать элерон 12 и чтобы в случае отказа одного из приводов 50 управление элероном 12 могло продолжаться.
Расположение устройства приведения в движение в кожухе является предпочтительным, так как двигатели и цепи не загромождают конструкцию летательного аппарата. Это облегчает установку поверхности управления полетом в летательный аппарат в фазе сборки/изготовления и дальнейшие операции обслуживания. Монтаж облегчается в целом, благодаря расположению в соответствии с изобретением.
Каждая подвижная поверхность, оснащенная двумя приводами 50, имеет устройство, не дающее двигателям приводов 50 создавать противодействующие усилия на кожухе подвижной поверхности управления полетом. В отсутствие такого устройства существует риск того, что один из двигателей противодействует усилию, создаваемому другим двигателем, так как, например, по ошибке ему задают вращение в противоположную сторону, или оба двигателя имеют разные скорости или крутящие моменты по причине проблемы калибровки или регулирования двигателей относительно друг друга.
На фиг. 5 показан элерон 12, оснащенный таким устройством, которое содержит тензометры 60, закрепленные на площадке 80, на которой закреплены статоры двигателей и которая закреплена на кожухе 20. Тензометры 60 расположены таким образом, чтобы обнаруживать напряжения, действующие на площадку 80 и, следовательно, на кожух 20 элерона 12.
Тензометры 60 связаны с цепью 61 обнаружения, которая содержит процессор, запрограммированный таким образом, чтобы на основании сигналов, поступающих от тензометров 60, определять, действуют ли двигатели приводов 50 усилиями одинаковой интенсивности и одинакового направления. Программа предусмотрена таким образом, чтобы различать напряжения, действующие на кожух 20, которые появляются в результате аэродинамической тяги, и напряжения, которые появляются в результате усилий, создаваемых двигателями. Программа предусмотрена таким образом, чтобы определять амплитуду и направление результирующей противодействующих усилий, чтобы получить возможность определить корректирующее действие цепей управления двигателями в зависимости от этой результирующей.
Цепь 61 обнаружения связана с цепями 53 управления двигателей, чтобы выдавать им поправочные данные, позволяющие цепям 53 управления управлять двигателями таким образом, чтобы они создавали одинаковое усилие. Цепи 53 управления используют поправочные данные, чтобы воздействовать напрямую на заданное значение контура автоматического регулирования питания током катушек каждого двигателя. При этом заданное значение одного из двигателей принудительно понижают: двигатель переводится в режим демпфирования (заданное значение тока приводят к значению, близкому к нулю), затем заданное значение тока увеличивают, предпочтительно постепенно, до значения, обеспечивающего уравновешивание усилий, создаваемых обоими двигателями. Следует отметить, что уравновешивание производят непосредственно на коротком контуре обратной связи, чтобы оно происходило как можно быстрее. Выбор двигателя, заданное значение тока для которого понижают, осуществляет компьютерная программа управления командами вычислительного устройства управления полетом. Программа выбирает надлежащий двигатель, например, в зависимости от хронологии ранее зарегистрированных значений тока (в режим демпфирования переводят двигатель, который до этого находился под наибольшей нагрузкой) или от других данных, поступающих от системы мониторинга состояния двигателей. Вычислительное устройство может в реальном времени выбирать двигатель для перевода в режим демпфирования или может иметь в памяти указание на этот двигатель (в режим демпфирования всегда переводится один и тот же двигатель, или поочередно один, затем другой). В варианте в режим демпфирования переводят двигатель, создающий наиболее слабое усилие. Это последнее решение является исключительно простым и быстрым.
Как показано на фиг. 6, устройство содержит орган 65 измерения деформаций, через который проходит стержень 70, один конец которого связан во вращении с ротором одного из двигателей, а противоположный конец связан во вращении с ротором другого из двигателей. Орган 65 измерения деформаций измеряет напряжения кручения, появляющиеся в результате разности между усилиями, создаваемыми обоими двигателями. Орган 65 измерения деформаций можно заменить тензометрами.
Орган 65 измерения деформация соединен с цепью 61 обнаружения, которая содержит процессор, запрограммированный таким образом, чтобы на основании сигналов, поступающих от тензометров 60, определять, действуют ли двигатели приводов 50 усилиями одинаковой интенсивности и одинакового направления.
Преимуществом этой конструкции является более простая обработка, так как стержень 70 менее подвержен воздействиям аэродинамических сил, действующих на кожух 20.
Кроме того, напряжения, которыми действуют на кожух 20 противодействующие усилия двигателей, ограничены присутствием стержня 70.
В версии этого варианта осуществления, показанной на фиг. 7, стержень 70 не имеет тензометров.
Понятно, что, если при управлении двигателями они не вращаются с одинаковой скоростью, стержень 70 будет передавать на ротор более быстрого двигателя противодействующее усилие, создаваемое более медленным двигателем. Таким образом, стержень 70 способствует уравновешиванию усилий, которыми двигатели действуют на подвижную поверхность. Кроме того, если при управлении двигателям задают вращение в противоположных направлениях с эквивалентным крутящим моментом, роторы двигателей не будут вращаться. Это отсутствие движения будет обнаружено датчиками, связанными с цепями 53 управления, которые выполнены с возможностью осуществления соответствующего корректирующего действия.
Эта версия более всего подходит для двигателей, создающих относительно слабый крутящий момент.
Разумеется, изобретение не ограничивается описанными вариантами осуществления и охватывает любую версию, не выходящую за пределы объема изобретения, определенного формулой изобретения.
В частности, подвижная поверхность управления полетом может иметь конструкцию, отличную от описанной выше.
Двигатель может быть вынесен относительно шарнирной оси 21 подвижной поверхности и может быть связан с осью 21 через механическую трансмиссию, такую как зубчатая передача, ременная передача и т.д.
Шарнирная ось и выходной вал двигателя могут быть выполнены за одно целое или раздельно. Выходной вал двигателя может иметь концы, выступающие с каждой стороны двигателя.
Двигатель может быть линейным.
Площадки являются факультативными, или на площадке может быть закреплен только двигатель.
Подвижная поверхность может содержать другое число двигателей.
Шарнирная ось кожуха может быть выполнена в виде одной или нескольких частей.
Шарнирная ось может иметь только один выступающий из кожуха конец, чтобы получить подвижную поверхность типа «утки».
Площадка с установленными на ней цепями может быть выполнена отдельно от несущей конструкции элерона и может быть соединена с валом или с поясными элементами подвижной поверхности.
Цепи могут быть установлены на одной или на нескольких площадках.
Предпочтительно электрические соединения между поверхностью и самолетом могут быть выполнены либо напрямую (соединитель на наружной стороне поверхности), либо через провода, которые проходят внутри одной из осей вращения/крепления поверхности на самолете.
Предпочтительно кожух содержит защитный экран против электромагнитных помех. Например, поверхность выполнена из композиционного материала с углеродом (углерод с наполнителем, сетка из волокон и т.д.). Поскольку кожух расположен вокруг узла двигателя и электронных компонентов, он образует экран, способствующий электромагнитной совместимости между электроникой и двигателями, а также обеспечивающий защиту от окружающей среды (например, защиту от молнии).
Согласно предпочтительному отличительному признаку, ось вращения является полой, и в оси вращения проходит электрический провод, соединенный по меньшей мере с одной из цепей. Предпочтительно каждая из двух цепей соединена с проводом, проходящим в оси вращения. Часть проводов, проходящая между подвижной поверхностью и самолетом, подвергается напряжениям изгиба во время движений подвижной поверхности. Прокладка проводов в полой оси позволяет избегать этих напряжений изгиба и, следовательно, ограничивает усталостный износ провода.
Можно предусмотреть единственную цепь управления и/или единственную силовую цепь, общую для двигателей, или раздельные цепи управления и/или силовые цепи.
В варианте цепь управления выполнена с возможностью отслеживать работу по меньшей мере части подвижной поверхности. Это отслеживание осуществляют, например, путем сравнения значений электрических параметров силовой цепи с пороговыми значениям и/или путем отслеживания изменения сигналов по меньшей мере одного датчика, такого как температурный датчик, установленный на двигателе. Это позволяет отслеживать состояние (“health monitoring”) двигателей подвижной поверхности.
Стержень может быть связан с устройством измерения деформаций контактно или без контакта.
Цепь управления может быть выполнена таким образом, чтобы корректирующее действие представляло собой уменьшение заданного значения тока питания одного из двигателей и предпочтительно чтобы за уменьшением заданного тока питания одного из двигателей следовало увеличение заданного значения тока по меньшей мере указанного двигателя вплоть до уравновешивания создаваемых двигателями усилий.
Устройство приведения в движение может быть расположено на конструкции летательного аппарата.
Электромеханическое устройство приведения в движение подвижной поверхности (11, 12) управления полетом, состоящей из кожуха (20), шарнирно соединенного с конструкцией летательного аппарата вокруг оси (21) вращения, содержит не менее двух электрических двигателей (51) для приведения во вращение кожуха вокруг оси вращения, силовую цепь (52) и цепь (53) управления для обеспечения питания и для управления каждым из двигателей, устройство ограничения противодействующих усилий, создаваемых электрическими двигателями. Обеспечивается улучшение приведения в движение подвижных поверхностей управления полетом в летательном аппарате. 7 з.п. ф-лы, 7 ил.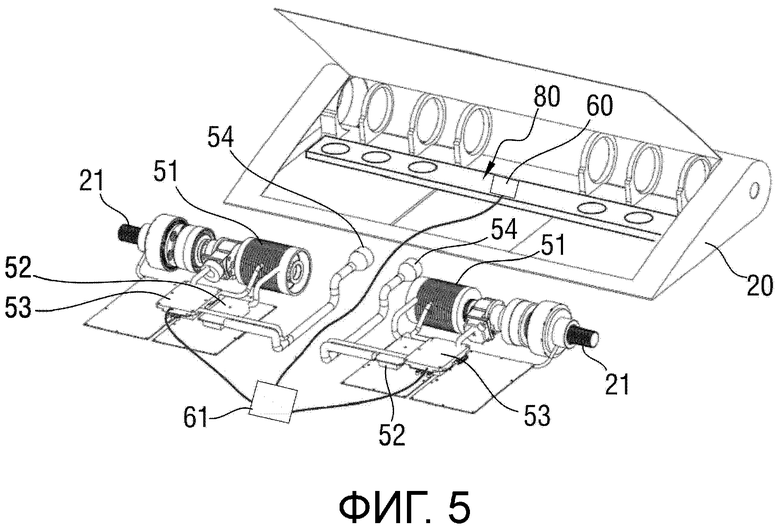
1. Электромеханическое устройство приведения в движение подвижной поверхности (11, 12) управления полетом, имеющей кожух (20), шарнирно соединенный с конструкцией летательного аппарата вокруг оси (21) вращения, содержащее:
- по меньшей мере два электрических двигателя (51) для приведения во вращение кожуха вокруг оси вращения,
- силовую цепь (52) и цепь (53) управления для обеспечения питания и для управления каждым из двигателей,
- устройство ограничения противодействующих усилий, создаваемых электрическими двигателями.
2. Устройство по п. 1, содержащее цепь (61) обнаружения, выполненную с возможностью определения амплитуды и направления результирующей противодействующих усилий, чтобы обеспечивать корректирующее действие цепи (53) управления двигателями в зависимости от этой результирующей.
3. Устройство по п. 2, в котором цепь (61) обнаружения связана с тензометрами (60) и выполнена с возможностью определять на основании сигналов тензометров амплитуду и направление результирующей противодействующих усилий.
4. Устройство по п. 3, в котором тензометры (60) закреплены на площадке (80), на которой закреплены статоры двигателей.
5. Устройство по п. 3, в котором тензометры (60) закреплены на стержне (70), связывающем между собой и во вращении роторы двигателей (51).
6. Устройство по любому из пп. 2-5, в котором цепь (53) управления выполнена так, чтобы корректирующее действие представляло собой уменьшение заданного значения тока питания одного из двигателей (51).
7. Устройство по п. 6, в котором за уменьшением заданного тока питания одного из двигателей (51) следует увеличение заданного значения тока по меньшей мере указанного двигателя вплоть до уравновешивания создаваемых двигателями усилий.
8. Устройство по п. 1, в котором устройство содержит стержень (70), связывающий между собой и во вращении роторы двигателей (51).
| WO 2015189424 A1, 17.12.2015 | |||
| WO 2011157834 A3, 22.12.2011 | |||
| DE 102011114222 A1, 02.05.2013 | |||
| EP 2927113 A1, 07.10.2015 | |||
| US 6705570 B1, 16.03.2004. |

