ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Данное изобретение относится к устройствам пилотирования, применяемым пилотом в кабине летательного аппарата. В частности, оно касается активной ручки управления, содержащей встроенную силовую обратную связь для помощи пилоту.
УРОВЕНЬ ТЕХНИКИ
Устройство пилотирования в кабине летательного аппарата обычно содержит ручку управления, в частности, с рычагом управления, установленным с возможностью поворота по так называемой оси крена и по так называемой оси тангажа, причем эти обе оси являются ортогональными друг к другу. Чаще всего встречаются ручки управления «рычажного» типа.
Устройство пилотирования передает команды перемещения на органы управления летательного аппарата, при этом команды перемещения определяются в зависимости от положения рычага вдоль этих двух осей.
На самых последних моделях ручки управления приводы поверхностей управления являются электронными (называемыми также приводами “fly-by-wire”), и встроенное устройство управления в кабине может быть устройством типа «боковой ручки управления» (“side stick” на английском языке). Положение рычага вдоль двух осей крена и тангажа измеряют при помощи датчиков и переводят в команды перемещения. Рычаг механически не связан напрямую с подвижными частями летательного аппарата. Следовательно, пилот не ощущает прямой механической обратной связи.
Однако для обеспечения безопасности полета желательно, чтобы пилот чувствовал силовую обратную связь на уровне рычага. Эта силовая обратная связь может меняться в зависимости от состояния летательного аппарата. Системы сигнализации кабины могут оказаться недостаточными для обеспечения достаточно быстрой реакции пилота при наступлении непредвиденных событий во время полета.
Ощущения пилотирования могут быть намного лучше, если боковая ручка управления содержит встроенную активную силовую обратную связь, называемую также «тактильной обратной связью».
В связи с этим было предложено оснащать боковую ручку пассивными механическими системами силовой обратной связи, такими как системы с пружиной, или активными электромеханическими системами.
В документе FR 3 011 815 описано устройство активной силовой обратной связи с электрическим приводом. В этом документе устройство управления полетом летательного аппарата содержит рычаг управления, установленный на площадке и соединенный с приводом оси крена и с приводом оси тангажа через трансмиссионные валы. Эти два привода, называемые приводами силовой обратной связи, управляются по правилу усилия. Во время работы боковой ручки управления эти приводы создают усилие сопротивления (силовая обратная связь), противодействующее усилию, действующему на рычаг. Такое устройство показало свою эффективность для воспроизведения ощущений пилотирования и для повышения безопасности полета.
Однако в случае электрической или механической неисправности на уровне приводов силовой обратной связи или в случае частичного или полного отказа на цепи обработки командных сигналов управления этими приводами, или в случае неисправности питания электрической энергией силовая обратная связь может пропасть.
В этом случае пилот перестает ощущать тактильную обратную связь на рычаге и даже на точке крепления рычага. Однако в области авиации требования надежности работы устройств управления являются критическими. Следовательно, недопустимо, чтобы пилот резко переходил в режим управления без силовой обратной связи и без точки крепления в случае неисправности привода или цепи обработки.
Для обеспечения «механического дублирования» и предупреждения свободного управления рычагом в случае, когда, например, один или несколько приводов оказываются неисправными, было предложено добавить к боковой ручке механические системы блокировки рычага.
Однако эти системы, как правило, являются сложными, дорогими и недостаточно надежными. Кроме того, они занимают много места.
Кроме того, было предложено добавить тормоза в боковую ручку для обеспечения механического дублирования. Например, некоторые известные боковые ручки содержат два магнитореологических тормоза, активируемых электронными средствами. При активации оба тормоза создают усилие сопротивления, противодействующее перемещениям рычага по осям крена и тангажа.
Основные недостатком этих известных боковых ручек является необходимость дополнительного электрического питания специально для тормозов, которое отличается от питания приводов силовой обратной связи, например, батареи или авиационной аварийной воздушной турбины (называемой также RAT от “ram air turbine”). Действительно, когда обычный источник электрического тока приводов силовой обратной связи выходит из строя, необходимо, чтобы тормоза получали надлежащее питание. Такое дополнительное питание приводит к усложнению системы управления.
Кроме того, эти системы не обеспечивают механического дублирования в случае неисправности в цепи управления активацией тормозов. Например, в случае полного отсутствия электричества магнитореологические тормоза не работают.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
С учетом вышеизложенного существует потребность в ручке управления летательного аппарата, включающей в себя канал механического дублирования, не позволяющий рычагу свободно поворачиваться и, следовательно, не позволяющий пилоту полностью потерять всякое ощущение силовой обратной связи в случае общего отсутствия электричества на уровне ручки управления.
Ставится задача расширения случаев отказа, при которых ручка управления включает в себя аварийный дублирующий канал, чтобы предусматривать, в частности, случаи полного отсутствия электричества и повысить безопасность полета.
Существует потребность в ручке управления, имеющей массу, габарит и электрическую энергоемкость, меньшие по сравнению с существующими ручками управления, содержащими механический дублирующий канал.
Предпочтительно такая ручка управления не имеет дополнительного электрического питания, предназначенного для механического дублирующего канала.
Существует также потребность в ручке управления, в которой элементы, обеспечивающие механическое дублирование для приводов силовой обратной связи, имеют повышенную надежность и достаточный срок службы.
Для решений этих задач первым объектом изобретения является устройство приложения усилия для ручки управления летательным аппаратом, при этом ручка управления содержит вал и рычаг управления, выполненный с возможностью приведения во вращение вала вокруг первой оси, при этом устройство включает в себя:
- магнитный тормоз, содержащий
тормозную деталь, выполненную с возможностью соединения с валом, и
объем, содержащий реологическую текучую среду, входящую в контакт с тормозной деталью, при этом сопротивление сдвигу реологической текучей среды меняется в зависимости от магнитного поля, действующего на реологическую текучую среду,
- привод силовой обратной связи, выполненный с возможностью создавать обратное усилие, противодействующее вращению вала вокруг первой оси,
- источник тока привода силовой обратной связи,
при этом устройство дополнительно включает в себя:
- подвижный магнитный элемент, имеющий положение, близкое к магнитному тормозу, и положение, отдаленное от магнитного тормоза, при этом подвижный магнитный элемент излучает в близком положении магнитное поле в объеме, при этом подвижный магнитный элемент подвергается воздействию в направлении близкого положения,
- средства отдаления, выполненные с возможностью удерживать подвижный магнитный элемент в отдаленном положении, когда средства отдаления получают питание электрическим током от источника тока, и не удерживать подвижный магнитный элемент в отдаленном положении, когда средства отдаления не получают питания.
Магнитный тормоз заявленного устройства приложения усилия выполнен с возможностью действовать усилием сопротивления на вал в случае отказа привода силовой обратной связи, например, привода крена или привода тангажа.
Средства отдаления подвижного магнитного элемента, содержащие, например, соленоид, используют общий источник тока с приводом силовой обратной связи. Таким образом, в случае электрической неисправности или отсутствия тока на приводе силовой обратной связи средства отдаления тоже оказываются затронутыми этой неисправностью и перестают оказывать на магнитный элемент воздействие, направленное в сторону отдаленного от тормоза положения.
Кроме того, поскольку подвижный магнитный элемент смещается в сторону положения, близкого к тормозу, этот элемент, который является, например, постоянным магнитом, приближается к тормозу и намагничивает намагничиваемый элемент, встроенный в тормоз. Этим намагничиваемым элементом в данном случае является объем, содержащий реологическую текучую среду.
При этом тормоз осуществляет свою функцию механического дублирования и препятствует свободному повороту рычага управления летательным аппаратом.
Преимуществом этого устройства приложения усилия является то, что в случае электрической неисправности привода силовой обратной связи тормоз включается полностью автоматически и пассивно посредством перемещения подвижного магнитного элемента. Следовательно, заявленное устройство приложения усилия обеспечивает контроль над ситуацией отсутствия электрического тока на приводе силовой обратной связи.
Дополнительным преимуществом является низкое потребление тока этим устройством приложения усилия в его номинальном режиме. Незначительного дополнительного электрического тока достаточно для поддержания тормоза в готовом для активации состоянии.
Следует отметить, что нет необходимости в отдельном электрическом питании, предназначенном для управления магнитным тормозом. В возможном варианте тормоз управляется не электронными средствами, а приводится в действие при приближении подвижного магнитного элемента.
Еще одним преимуществом заявленного устройства приложения усилия является его небольшая механическая сложность. Дополнительные элементы (подвижный магнитный элемент, средства отдаления указанного устройства от тормоза), обеспечивающие функциональность тормоза в случае отсутствия тока, могут быть очень простыми и не занимают много места.
Согласно возможному варианту работы, устройство приложения усилия выполнено с возможностью обеспечивать полную блокировку рычага управления в случае электрической неисправности на приводе, при этом противодействующее усилие, создаваемое магнитным тормозом на валу, является достаточно большим, чтобы блокировать вращение вала.
Заявленное устройство приложения усилия может также иметь факультативно и не ограничительно следующие отличительные признаки, рассматриваемые отдельно или в любой из технически возможных комбинаций:
- устройство дополнительно содержит возвратные средства, выполненные с возможностью действовать возвратным усилием на подвижный магнитный элемент, которое стремится переместить магнитный элемент в близкое положение, при этом возвратное усилие меньше усилия отдаления, которым средства отдаления действуют на подвижный магнитный элемент, когда эти средства отдаления получают питание.
- средства отдаления содержат соленоид, при этом соленоид предпочтительно расположен противоположно к магнитному тормозу по отношению к подвижному магнитному элементу.
- средства отдаления содержат магнитный контур, образующий полость, при этом контур выполнен таким образом, чтобы в отдаленном положении подвижный магнитный элемент заходил в полость.
- реологическая текучая среда содержит магнитореологическую текучую среду или магнитный порошок.
- ручка управления содержит корпус, а магнитный тормоз содержит неподвижную деталь, установленную на корпусе, при этом неподвижная деталь ограничивает вместе с тормозной деталью объем, содержащий реологическую текучую среду.
- подвижный магнитный элемент содержит постоянный магнит.
- тормозная деталь содержит тормозной диск, расположенный в плоскости расширения, при этом постоянный магнит расположен вдоль оси, перпендикулярной к плоскости расширения.
- подвижный магнитный элемент выполнен с возможностью производить в объеме магнитное поле с индукцией, превышающей порог, составляющий от 0,1 тесла до 10 тесла.
- устройство дополнительно содержит электромагнит, выполненный с возможностью создавать переменное магнитное поле в объеме реологической текучей среды.
- устройство дополнительно содержит механическую муфту, соединенную во вращении с рычагом вокруг второй оси, и датчик усилия, выполненный с возможностью действовать крутящим моментом на механическую муфту вокруг второй оси.
- рычаг управления приводит также во вращение дополнительный вал вокруг третьей оси, и устройство дополнительно содержит:
дополнительный магнитный тормоз, выполненный с возможностью действовать усилием сопротивления, чтобы препятствовать вращению дополнительного вала вокруг третьей оси, при этом указанный дополнительный тормоз содержит дополнительный объем реологической текучей среды,
дополнительный привод силовой обратной связи, выполненный с возможностью создавать усилие сопротивления, противодействующее вращению дополнительного вала вокруг третьей оси,
дополнительный подвижный магнитный элемент, имеющий положение, близкое к дополнительному тормозу, и положение, отдаленное от дополнительного тормоза, при этом дополнительный подвижный магнитный элемент излучает в близком положении магнитное поле в дополнительном объеме реологической текучей среды, при этом дополнительный подвижный магнитный элемент смещается в сторону положения, близкого к дополнительному тормозу, средства отдаления, выполненные с возможностью удерживать дополнительный подвижный магнитный элемент в положении, отдаленном от дополнительного тормоза.
Вторым объектом изобретения является активная ручка управления, содержащая описанное выше устройство приложения усилия и дополнительно содержащая подвижный рычаг управления, вращающийся вокруг второй оси, при этом вращение вала вокруг первой оси связано с вращением рычага вокруг второй оси.
Факультативно и не ограничительно, указанная активная ручка управления может иметь следующие отличительные признаки, рассматриваемые отдельно или в любой из технически возможных комбинаций:
- ручка содержит подвижный вал, вращающийся вокруг первой оси и связанный с тормозной деталью устройства приложения усилия,
- ручка дополнительно содержит вычислительное устройство, выполненное с возможностью передавать командный сигнал на привод силовой обратной связи, при этом усилие сопротивления, создаваемое на валу приводом силовой обратной связи во время работы ручки, является функцией заданного значения усилия, закодированного в командном сигнале,
- источник тока привода силовой обратной связи выполнен с возможностью подачи питания на вычислительное устройство, при этом средства отдаления выполнены с возможностью своего отключения в случае электрической неисправности, затрагивающей вычислительное устройство.
Третьим объектом изобретения является летательный аппарат, содержащий такую активную ручку управления.
Четвертым объектом изобретения является применение описанного выше устройства приложения усилия внутри ручки управления летательным аппаратом, чтобы при неисправности, влияющей на источник тока привода силовой обратной связи, препятствовать вращению вала вокруг первой оси.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Другие отличительные признаки, задачи и преимущества изобретения будут более очевидны из нижеследующего описания, представленного исключительно в качестве иллюстративного и неограничивающего примера, со ссылками на прилагаемые фигуры, на которых:
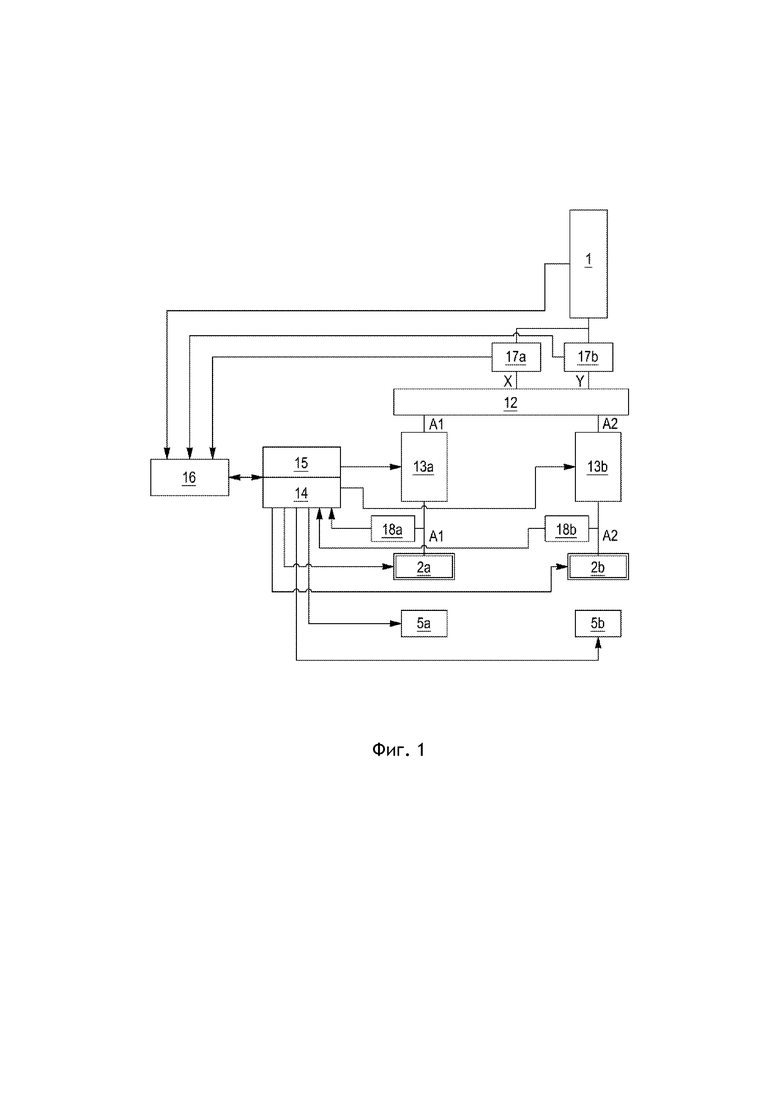
на фиг. 1 представлена функциональная схема общей архитектуры системы пилотирования, содержащей ручку управления согласно варианту осуществления изобретения;
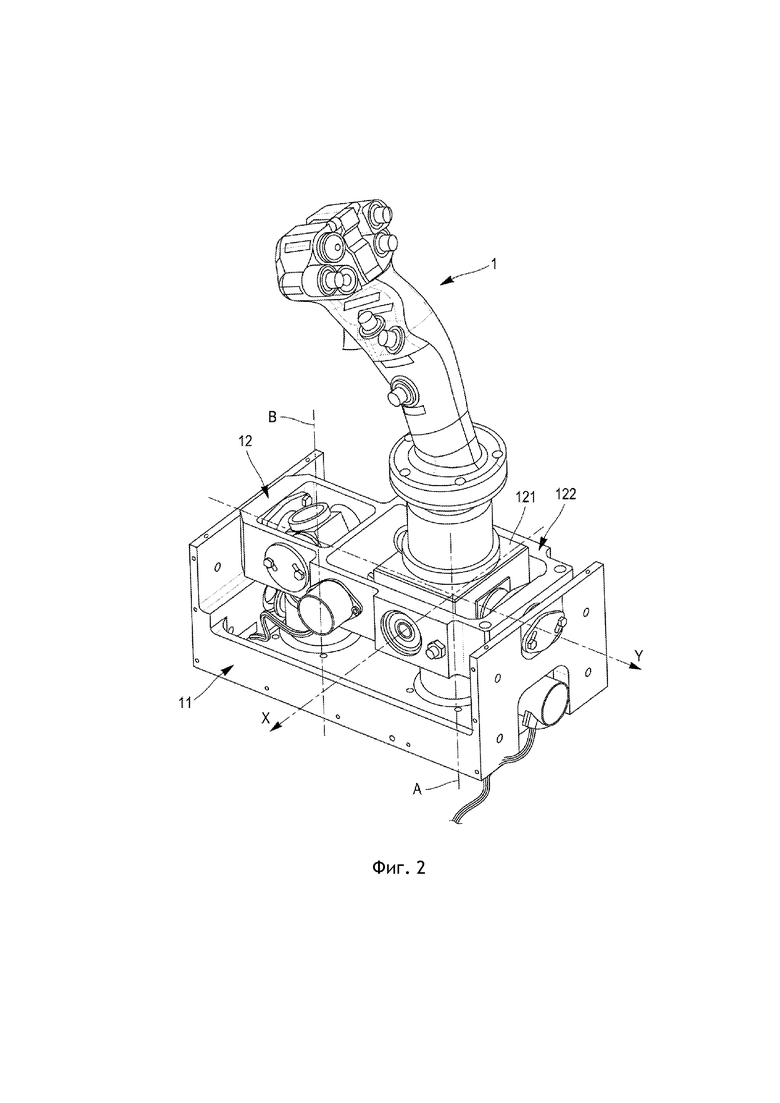
на фиг. 2 представлены рычаг управления и механическая муфта системы пилотирования, показанной на фиг. 1, вид в перспективе;
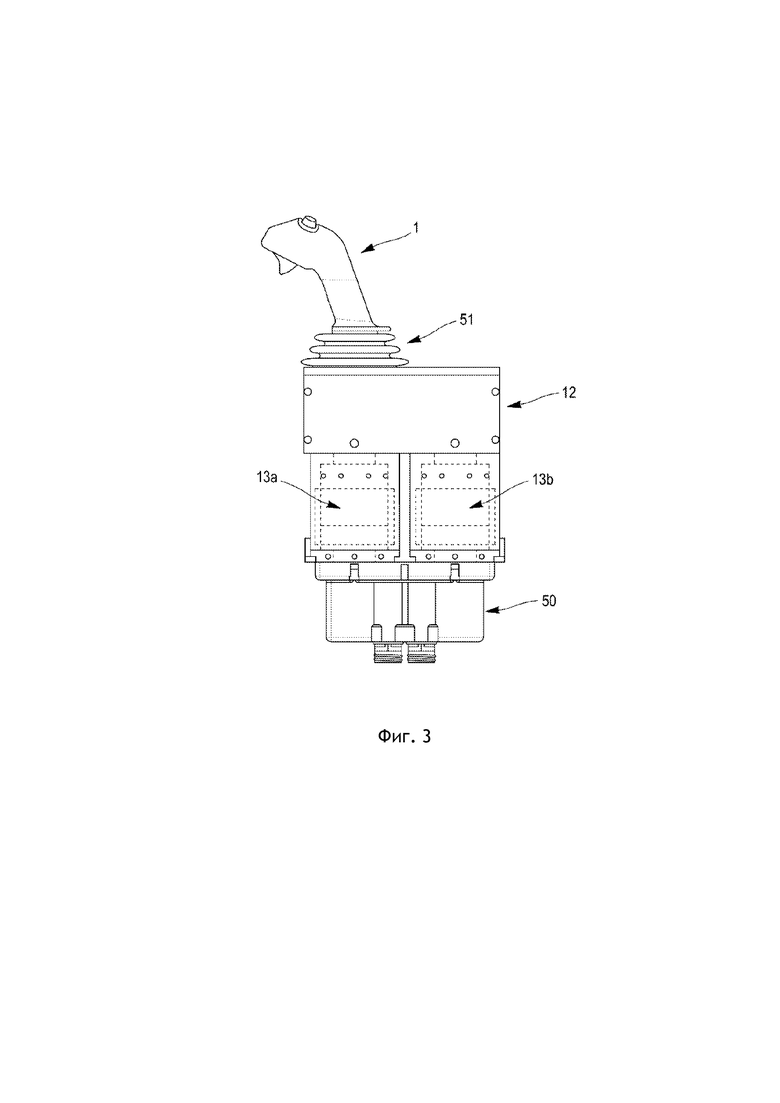
на фиг. 3 схематично показана ручка системы управления, изображенной на фиг. 1, причем эта ручка включает в себя устройство приложения усилия и, в частности, два привода силовой обратной связи, вид сбоку;
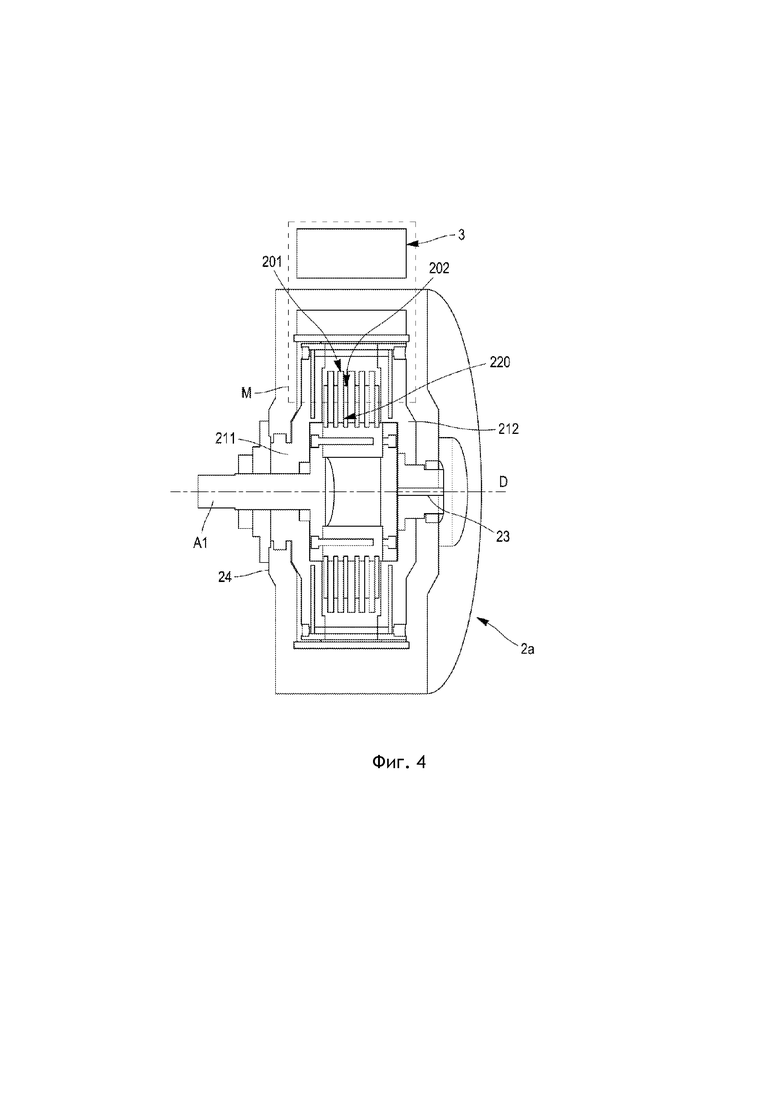
на фиг. 4 показан магнитный тормоз согласно примеру осуществления, вид в разрезе;
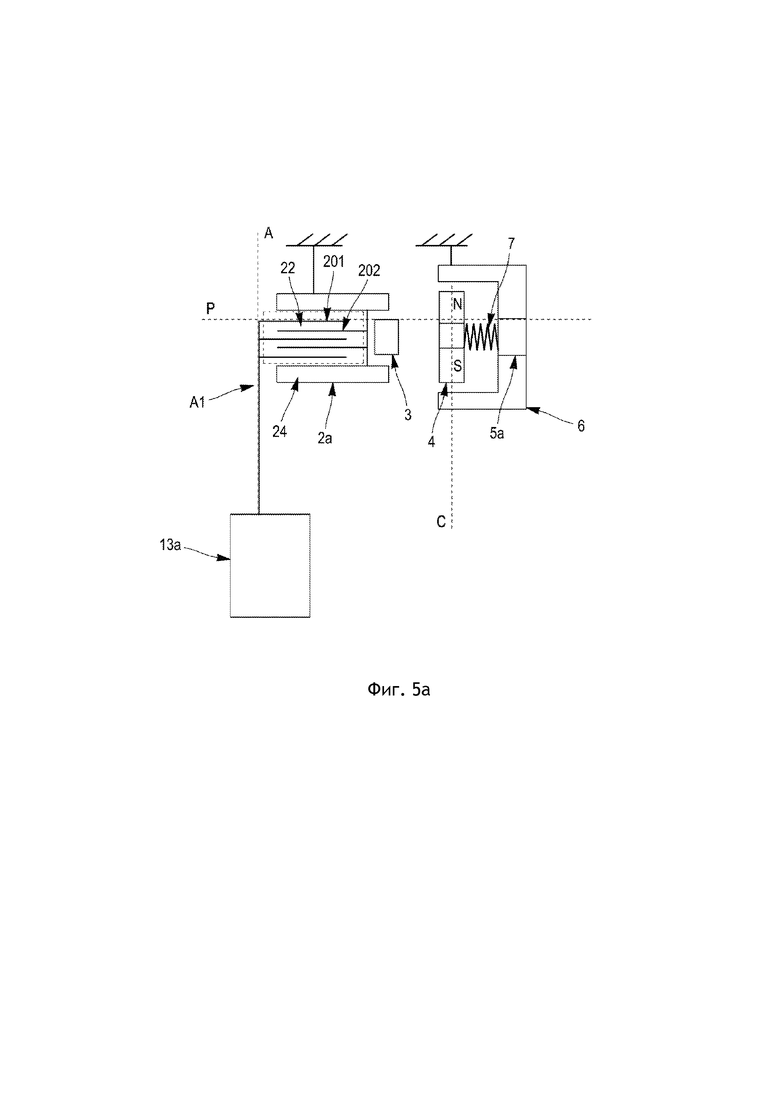
на фиг. 5а схематично показано устройство приложения усилия согласно варианту осуществления, в котором подвижный постоянный магнит устройства приложения усилия находится в положении, отдаленном от магнитного тормоза;
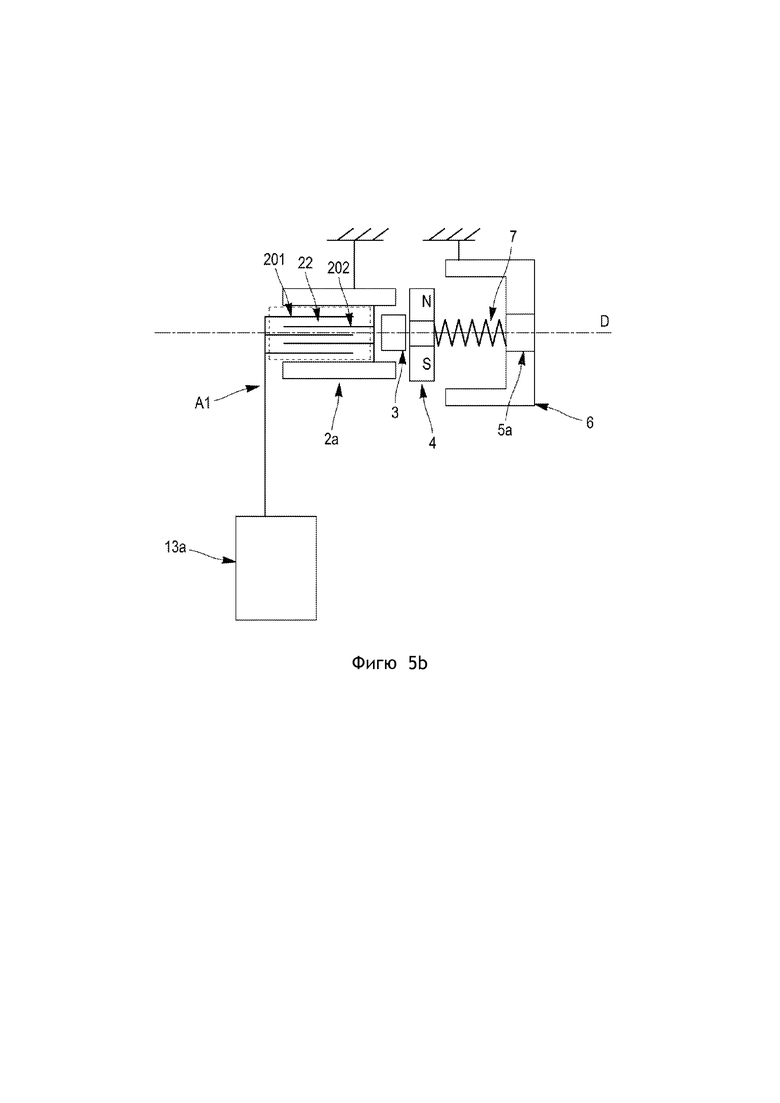
на фиг. 5b схематично показано это же устройство приложения усилия согласно варианту осуществления, в котором подвижный постоянный магнит указанного устройства находится в положении, близком к магнитному тормозу.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее следует описание примеров, относящихся к подвижной ручке управления летательным аппаратом, поворачивающейся по оси крена Х и по оси тангажа Y. Вместе с тем, заявленное устройство приложения усилия можно использовать с теми же преимуществами вместе с ручкой управления, подвижной по одной или нескольким осям перемещения, отличным от оси вращения крена или тангажа.
В дальнейшем под «правилом демпфирования» магнитного тормоза следует понимать соотношение между угловым положением рычага по оси вращения и усилием сопротивления, производимым в противодействие перемещению вращением вокруг указанной оси, например, приводом силовой обратной связи. Кроме того, под «правилом усилия» следует понимать соотношение между положением рычага и общим усилием, воспроизводимым на рычаге, которое может быть противодействующим или приводным (это общее усилие учитывает действие одного или нескольких приводов силовой обратной связи и, возможно, действие тормозов).
На всех фигурах и в дальнейшем описании подобные элементы имеют одинаковые буквенно-цифровые обозначения.
Общая архитектура ручки управления
На фиг. 1 представлена функциональная архитектура системы пилотирования летательного аппарата, при этом летательным аппаратом управляют, в частности, по оси крена и по оси тангажа. Представленная система пилотирования содержит, в частности, боковую ручку управления. Обычно боковая ручка находится в кабине летательного аппарата.
На этой фигуре линии без стрелок между двумя функциональными единицами соответствуют механическим связям. Связи со стрелками являются электрическими и/или электронными связями, через которые могут передаваться данные или электрический ток.
Система содержит рычаг 1 управления. Рычаг установлен с возможностью поворота по оси Х крена и по оси Y тангажа рычага, при этом обе оси являются ортогональными. Пилот действует на угловое положение рычага по оси крена и оси тангажа для управления подвижными частями летательного аппарата.
Предпочтительно рычаг 1 управления установлен на механической муфте 12, например, на площадке механической муфты. Механическая муфта 12 может быть установлена на картере, неподвижно соединенном с полом летательного аппарата. Элементы механической муфты 12 соединены во вращении с рычагом 1 вокруг оси крена Х, и элементы механической муфты 12 соединены во вращении с рычагом 1 вокруг оси тангажа Y. Пример механической муфты 12 будет описан ниже.
Система пилотирования содержит также вычислительное устройство 15 и блок 16 управления полетом или FCS от “Flight Control System”.
Электронные сигналы положения рычага, считываемые датчиком 18а углового положения рычага, связанным с осью крена Х, и датчиком 18b углового положения рычага, связанным с осью тангажа Y, поступают в блок 16 управления. Факультативно, датчики 18а и 18b передают также данные о скорости поворота рычага 1 по осям крена и тангажа. Блок 16 управления переводит данные положения/скорости рычага в командные сигналы управления подвижными частями летательного аппарата.
Согласно изобретению, ручка управления, показанная на фиг. 1, дополнительно содержит устройство приложения усилия. В данном случае устройство приложения усилия выполнено с возможностью создавать усилие сопротивления, противодействующее повороту рычага по оси крена и по оси тангажа. Функцией устройства приложения усилия является обеспечение силовой обратной связи или «тактильной связи» на ручке в ответ на перемещение рычага 1 пилотом.
Устройство приложения усилия содержит привод 13а силовой обратной связи, связанный с валом А1, имеющим ось А. Вал А1 является приводным валом привода 13а силовой обратной связи. Вал А1 механически связан с движениями вращения рычага 1 вокруг оси крена Х, в данном случае через механическую муфту 12. Когда рычаг 1 поворачивается по оси крена Х, вал А1 приводится во вращение вокруг своей оси А.
Точно так же, устройство приложения усилия содержит в данном случае привод 13b силовой обратной связи, связанный с приводным валом А2, имеющим ось В. Вал А2 связан с осью Y тангажа рычага. Приводы 13а и 13b силовой обратной связи являются электрическими приводами.
В альтернативном варианте привод 13а силовой обратной связи может быть выполнен с возможностью напрямую воздействовать на ось Х крена через свой приводной вал. Точно так же, привод 13b силовой обратной связи может быть выполнен с возможностью напрямую воздействовать на ось Y тангажа.
Факультативно и предпочтительно, приводы 13а и 13b силовой обратной связи являются приводами прямого действия или “direct drive” в современной англо-саксонской терминологии. Приводы действуют напрямую на механическую муфту без уменьшения скорости или без угловой передачи.
Кроме того, приводы силовой обратной связи предпочтительно являются приводами крутящего момента, которые могут передавать большой крутящий момент на валы даже в случае блокировки ротора. Например, используют приводы с низкой скоростью вращения и с большим крутящим моментом.
Предпочтительно крутящий момент, создаваемый приводами силовой обратной связи, контролируют в зависимости от информации о скорости вращения рычага или о положении рычага.
Вычислительное устройство 15 обеспечивает управление усилием сопротивления, создаваемым приводами 13а и 13b силовой обратной связи в противодействие движениям вращения рычага 1 соответственно по оси крена Х и по оси тангажа Y. Вычислительное устройство 15 генерирует и передает на приводы командные сигналы, кодирующие заданное значение усилия, например, заданное значение крутящего момента сопротивления, производимого приводами.
Вычислительное устройство 15 содержит электронный интерфейс для приема сигналов, содержащих данные положения/скорости рычага, и для передачи этих данных в блок 16 управления. Заданное значение усилия определяют в зависимости от данных положения/скорости рычага и/или в зависимости от других данных. Например, заданное значение усилия вычисляют в соответствии с заранее определенным правилом, записанным в памяти блока управления. Определение заданного значения усилия осуществляет блок 16 управления и/или вычислительное устройство 15.
Устройство приложения усилия содержит первый магнитный тормоз 2а, действующий на вал А1, и второй магнитный тормоз 2b, действующий на вал А2. Магнитный тормоз 2а и магнитный тормоз 2b выполнены с возможностью действовать усилием сопротивления, противодействующим вращению рычага, соответственно по оси крена и по оси тангажа, когда указанные тормоза активированы. В данном примере магнитные тормоза 2а и 2b принимают напрямую в качестве соответствующих входных валов валы А1 и А2, связанные с приводами 13а и 13b силовой обратной связи. Магнитные тормоза входят в прямое зацепление с приводными валами приводов силовой обратной связи.
Каждый магнитный тормоз содержит намагничиваемый элемент, который может намагничиваться при приложении к нему магнитного поля. Как будет показано ниже, магнитостатические взаимодействия между намагничиваемым элементом и, например, постоянным магнитом позволяют тормозить или блокировать относительное вращение входного вала и выходного вала магнитного тормоза.
В описанном ниже примере осуществления намагничиваемым элементом является реологическая текучая среда. Реологическая текучая среда является текучей средой, сопротивление сдвигу которой может меняться в зависимости от прикладываемого к ней магнитного поля. В дальнейшем реологическая текучая среда будет магнитореологической текучей средой, взвешенные частицы которой выстраиваются вдоль линий приложенного магнитного поля. В альтернативном варианте реологическая текучая среда может быть магнитным порошком. Еще в одном альтернативном варианте можно использовать диск из ферромагнитного материала, который может реверсивно намагничиваться в ответ на прикладываемое магнитное поле.
На фиг. 1 показан также источник 14 тока, подающий электрический ток на привод 13а силовой обратной связи. В данном случае источник 14 тока подает также электрический ток на привод 13b силовой обратной связи.
В случае нарушения в работе источника 14 тока (например, в случае электрической неисправности на этом источнике тока или в случае общей электрической неисправности) привод 13а силовой обратной связи не может действовать необходимым усилием сопротивления на рычаг 1 управления, чтобы противодействовать повороту последнего по оси крена Х. Следовательно, пилот теряет ощущение тактильного силовой обратной связи.
Как будет показано ниже, магнитный тормоз 2а выполнен с возможностью создавать усилие сопротивления на оси крена Х в случае неисправности, затрагивающей источник 14 тока, через деактивацию средств 5а отдаления. Средства отдаления действуют на положение подвижного магнитного элемента. Этот последний элемент активирует магнитный тормоз 2а, когда указанное устройство и указанный тормоз оказываются достаточно близко. Магнитный тормоз 2а образует механический дублирующий канал для привода 13а силовой обратной связи.
Средства 5а отдаления получают питание током от источника 14 тока и, следовательно, оказываются затронутыми при нарушении в работе источника 14 тока.
Точно так же, магнитный тормоз 2b образует механический дублирующий канал для привода 13b силовой обратной связи через деактивацию средств 5b отдаления, которые получают питание электрическим током от источника 14 тока.
В альтернативном варианте первый источник тока может питать привод 13а силовой обратной связи и средства 5а отдаления, и второй источник тока может питать привод 13b силовой обратной связи и средства 5b отдаления.
Важным преимуществом этой конструкции является то, что магнитные тормоза срабатывают автоматически и пассивно в случае неисправности, затрагивающей источник 14 тока. Таким образом, когда происходит нарушение в электрическом питании приводов силовой обратной связи, механическое дублирование (или “back-up”) для приводов обеспечивается без всякого человеческого вмешательства и без необходимости параметризации специальной команды для магнитных тормозов.
Нет необходимости предусматривать дополнительные, то есть «аварийные» блоки электрического питания, чтобы активировать магнитные тормоза. Действительно, активация магнитных тормозов происходит за счет отсутствия тока на уровне источника 14 тока.
Предпочтительно источник 14 тока, к которому подключены приводы 13а и 13b силовой обратной связи, обеспечивает также электрическое питание вычислительного устройства 15. Например, приводы 13а и 13b силовой обратной связи получают питание напрямую через само вычислительное устройство 15.
В этом случае прекращение или нарушение электрического питания вычислительного устройства 15 влияет на электрическое питание приводов силовой обратной связи, с одной стороны, и на электрическое питание средств отдаления, с другой стороны. Таким образом, магнитные тормоза 2а и 2b действуют в качестве механического дублирования не только в случае прекращения питания приводов, но также в случае прекращения питания вычислительного устройства. В данном случае приведение в действие магнитных тормозов в случае отказа вычислительного устройства тоже является пассивным и не требует ни человеческого вмешательства, ни специального органа управления.
Факультативно, система пилотирования содержит также датчики 17а и 17b усилия, измеряющие соответственно силу, которой пилот действует на рычаг 1 по оси Х и по оси Y. Речь может идти о любых известных типах датчиков усилия, например, о емкостных, пьезоэлектрических или резистивных датчиках.
Такие датчики являются, в частности, полезными, если система пилотирования имеет режим управления по усилию. В таком режиме рычаг 1 блокируется от вращения вокруг оси крена Х и оси тангажа Y. При этом блок 16 управления вычисляет командные сигналы управления подвижными частями летательного аппарата в зависимости от усилий, прикладываемых к рычагу 1 со стороны пилота.
В альтернативной архитектуре приводы 13а и 13b силовой обратной связи могут быть исключены из устройства приложения усилия. В этом случае магнитные тормоза 2а и 2b могут быть связаны с электромагнитами, создающими переменное магнитное поле, чтобы действовать заранее определенным усилием сопротивления в зависимости от положения и/или скорости рычага 1. Усилие сопротивления зависит от магнитного поля, создаваемого электромагнитами, причем это поле определяет, например, блок 16 управления в соответствии с правилом демпфирования.
На фиг. 2 в перспективе показана верхняя часть ручки управления из примера осуществления в соответствии с архитектурой, представленной на фиг. 1, и видны также внутренние детали механической муфты.
Рычаг 1 расположен на механической муфте 12, закрепленной на картере 11, неподвижно соединенном с корпусом летательного аппарата. Механическая муфта 12 может вращаться относительно картера вокруг осей Х и Y. В данном случае приводы 13а и 13b силовой обратной связи (на фиг. 2 не показаны) вынесены относительно рычага. Магнитные тормоза 2а и 2b тоже вынесены относительно рычага.
Рычаг 1 на одном конце является свободным, и им может манипулировать пилот летательного аппарата. Другим своим концом рычаг 1 закреплен на первой площадке 121 механической муфты 12. Первая площадка 121 выполнена с возможностью вращения вокруг оси Х и вокруг оси Y и связана со второй площадкой 122 механической муфты 12. Ось Х связана с первой площадкой 121 таким образом, что поворот первой площадки 121 вокруг оси Y заставляет поворачиваться ось Х вокруг оси Y.
Механическая муфта 12 связана с валами А1 и А2, выполняющими роль приводных валов для соответствующих приводов 13а и 13b силовой обратной связи (не показаны). Вал А1 проходит вдоль оси А, и вал А2 проходит вдоль оси В. В данном примере две трансмиссии, каждая из которых содержит карданный шарнир, переводят движение вращения рычага 1 по оси Х, соответственно по оси Y, в движение вращения вала А1 вокруг оси А, соответственно вала А2 вокруг оси В.
Приводы 13а и 13b силовой обратной связи входят в прямое зацепление с механической муфтой 12 через соответствующие приводные валы. Приводы силовой обратной связи передают на рычаг через механическую муфту усилие сопротивления или приводное усилие в ответ на движения поворота рычага 1 со стороны пилота в соответствии с заранее определенным правилом усилия или заранее определенным правилом демпфирования.
Для ознакомления с подробным примером конструкции механической муфты 12 и механической связи между этой муфтой и приводами силовой обратной связи можно обратиться к фиг. 1 документа FR 3 011 815 и к соответствующему ей описанию.
На фиг. 3 представлен вид сбоку ручки управления, показанной на фиг. 2.
На фиг. 3 рычаг 1 управления показан в нейтральном положении или в «нейтральной точке». В этом положении рычага команды пилотирования не действуют ни по крену, ни по тангажу на поверхности управления летательного аппарата. Рычаг 1 установлен в кабине экипажа на уровне цоколя, имеющего сильфон 51.
На фиг. 3 пунктирными линиями показано положение приводов 13а и 13b силовой обратной связи. В этом примере оба привода 13а и 13b силовой обратной связи имеют одинаковые размеры.
Цоколь рычага 1 управления содержит корпус 50, неподвижный относительно корпуса летательного аппарата. Элементы, обеспечивающие механический дублирующий канал для приводов, в частности, магнитные тормоза, в данном случае находятся под приводами внутри корпуса 50. Приводные валы А1 и А2 продолжены внутри корпуса 50.
В этом примере магнитные тормоза находятся противоположно к механической муфте по отношению к приводам силовой обратной связи.
Магнитный тормоз
На фиг. 4 показан магнитный тормоз 2а согласно примеру осуществления. Магнитный тормоз 2а показан в разрезе по плоскости, проходящей через ось А вала А1. Вал А1 служит входным валом магнитного тормоза 2а.
Тормоз содержит камеру 24 общей цилиндрической формы. Камера 24 центрована по оси А. Тормоз содержит также выходной вал 23. Предпочтительно выходной вал является коаксиальным с входным валом.
В данном случае вал А1 приводится во вращение приводом 13а силовой обратной связи, а выходной вал 23 соединен с корпусом ручки управления. Таким образом, вал А1 является подвижным и может вращаться вокруг оси А относительно выходного вала 23.
Тормоз содержит множество тормозных дисков. Тормозные диски заключены между первой герметичной стенкой 211 и второй герметичной стенкой 212 камеры 24. Тормозные диски включают в себя первый ряд дисков, соединенных во вращении с валом А1, и второй ряд дисков, соединенных во вращении с выходным валом 23. В центре тормозные диски содержат отверстие и центрованы по оси А.
Вдоль оси А диски первого ряда дисков чередуются с дисками второго ряда дисков.
В частности, на фиг. 4 показаны первый диск 201, неподвижно соединенный с валом А1, и второй диск 202, неподвижно соединенный с выходным валом 23 (и, следовательно, в данном случае неподвижный относительно корпуса). Первый диск 201 расположен напротив второго диска 202.
Между боковыми сторонами первого диска 201 и второго диска 202 остается герметичный объем 220 для размещения магнитореологической текучей среды 22. Герметичный объем ограничен первым диском 201 и вторым диском 202.
Во время работы ручки управления магнитореологическая текучая среда 22 находится в жидком состоянии. Предпочтительно герметичность герметичного объема обеспечивают уплотнительные прокладки на уровне распорок между дисками. Магнитореологическая текучая среда может поступать внутрь герметичного объема через не показанные каналы заполнения.
Точно так же, между боковыми сторонами других тормозных дисков остаются другие герметичные объемы. Магнитореологическая текучая среда 22 содержится в указанных герметичных объемах.
Когда вал А1 поворачивается вокруг оси А, диски первого ряда дисков, неподвижно соединенные с валом А1, поворачиваются относительно дисков второго ряда, неподвижно соединенных с выходным валом 23, сдвигая магнитореологическую текучую среду, содержащуюся в герметичных объемах.
Под действием приложенного магнитного поля происходит намагничивание магнитореологической текучей среды. Внутри магнитореологической текучей среды частицы, находящиеся в виде взвеси в текучей среде-носителе (как правило, металлические частицы), выравниваются в виде цепочек частиц параллельно линиям приложенного магнитного поля. Под действием приложенного магнитного поля сопротивление сдвигу магнитореологической текучей среды повышается.
Таким образом, магнитореологическая текучая среда 22 стремится противодействовать вращению первого диска 201 относительно второго диска 202. Следовательно, в активированном состоянии тормоз противодействует вращению вала А1 относительно корпуса летательного аппарата.
Крутящий момент сопротивления, создаваемый намагниченной магнитореологической текучей средой, намного превышает крутящий момент сопротивления, создаваемый не намагниченной магнитореологической текучей средой.
В примере, представленном на фиг. 4, магнитный тормоз 2а связан также с электромагнитом 3, выполненным с возможностью действовать переменным магнитным полем на уровне герметичных объемов магнитореологической текучей среды, меняя сопротивление сдвигу магнитореологической текучей среды. Например, электромагнит 3 расположен на одной стороне магнитного тормоза 2а вблизи герметичных объемов, содержащих магнитореологическую текучую среду. Электромагнит 3 обычно используют для моделирования правила демпфирования при нормальной работе ручки.
Пунктирной линией показана линия М создаваемого магнитного поля, когда электрический ток проходит на клеммах электромагнита 3.
В альтернативном варианте электромагнит 3 можно исключить, и в этом случае сопротивление сдвигу магнитореологической текучей среды может модулироваться только в зависимости от положения подвижного постоянного магнита 4, который будет описан ниже.
Преимуществом примера магнитного тормоза, показанного на фиг. 4, является его небольшой габаритный размер. Магнитный тормоз 2а связывает и разделяет по команде движения вращения вала А1 и выходного вала 23 вокруг их соответствующих осей при помощи небольшого количества механических компонентов. Кроме того, этот магнитный тормоз имеет хорошие характеристики передачи крутящего момента сопротивления.
Предпочтительно устройство приложения усилия не имеет органов механической трансмиссии, например, элементов угловой передачи или элементов, реализующих функцию понижения скорости, между магнитным тормозом 2а и валом А1 привода 13а силовой обратной связи. В частности, устройство приложения усилия предпочтительно не имеет угловых передач между магнитным тормозом и приводом силовой обратной связи.
Преимуществами этой конструкции являются меньший габарит магнитного тормоза, хорошая передача крутящего момента сопротивления на рычаг и хорошая общая эргономия боковой ручки, содержащей это устройство, по причине отсутствия паразитных изменений крутящего момента.
Дополнительным преимуществом является отсутствие дополнительных деталей, создающих трение между магнитным тормозом и ведущим валом. Срок службы магнитного тормоза увеличивается, и присутствие устройства приложения усилия лишь незначительно влияет на диапазоны углового смещения рычага.
В альтернативном варианте можно предусмотреть угловые передачи или детали, осуществляющие понижение скорости вращения, между входным(ыми) валом(ами) магнитного тормоза или обоих магнитных тормозов и приводным(ыми) валом(ами) привода или приводов силовой обратной связи.
Подвижное магнитное устройство и средства перемещения подвижного магнитного элемента
На фиг. 5а схематично показаны элементы устройства приложения усилия в соответствии с архитектурой, представленной на фиг. 1. На этой фигуре показано состояние устройства во время нормальной работы ручки управления. Здесь показан магнитный тормоз 2а, обеспечивающий механическое дублирование для привода 13 силовой обратной связи (на фигуре не показан), а также средства приведения в действие магнитного тормоза 2а.
Для упрощения далее будет описан только магнитный тормоз 2а и связанные с ним средства приведения в действие. Понятно, что, если устройство приложения усилия содержит другой тормоз, такой как магнитный тормоз 2b, последний предпочтительно связан с аналогичными средствами приведения в действие.
В данном случае средства приведения в действие содержат электромагнит 3, подвижный постоянный магнит 4, средства 5а отдаления подвижного постоянного магнита относительно магнитного тормоза, магнитный контур 6 и средства возврата магнита.
В данном примере подвижный постоянный магнит 4 представляет собой прямолинейный намагниченный брусок, имеющий северный полюс, обозначенный N на фигуре, и южный полюс, обозначенный S. Прямолинейный брусок расположен в продольном направлении вдоль оси С.
Предпочтительно ось С является перпендикулярной по отношению к плоскостям расширения тормозных дисков магнитного тормоза 2а. Одна из этих плоскостей имеет на фиг. 5а обозначение Р. Таким образом, магнитное поле, создаваемое подвижным постоянным магнитом 4 на уровне тормозных дисков, по существу направлено ортогонально к поверхностям указанных дисков в зоне, содержащей магнитореологическую текучую среду.
Подвижный постоянный магнит 4 образует подвижный магнитный элемент. В дополнение или вместо подвижного постоянного магнита 4 можно использовать другие подвижные устройства, способные создавать магнитное поле.
В зависимости от расстояния между подвижным постоянным магнитом 4 и магнитореологической текучей средой, содержащейся в магнитном тормозе 2а, магнитное поле, создаваемое в объемах, занимаемых магнитореологической текучей средой, является более или менее интенсивным. Следовательно, в зависимости от указанного расстояния усилие сопротивления, которым действует указанный тормоз на вал А1, является более или менее значительным.
Подвижный постоянный магнит 4 связан с возвратными средствами, входящими в состав устройства приложения усилия, которые стремятся приблизить магнит к магнитному тормозу 2а. В данном случае возвратные средства выполнены в виде пружины 7.
Первый конец пружины 7 соединен с подвижным постоянным магнитом 4, как правило, в точке, находящейся посередине подвижного постоянного магнита 4, если последний является намагниченным бруском. Второй конец пружины 7 соединен с деталью, неподвижно соединенной с корпусом летательного аппарата.
В положении, показанном на фиг. 5а, пружина 7 работает на растяжение и создает возвратную силу, которая стремится оттолкнуть магнит к магнитному тормозу 2а.
В альтернативном варианте осуществления можно использовать второй постоянный магнит для смещения подвижного постоянного магнита 4 в положение, близкое к тормозу. В комбинации или вместо возвратных средств можно использовать любое средство, выполненное с возможностью воздействовать на подвижный постоянный магнит 4, чтобы сместить его в это близкое положение и не требующее электрического питания для этого воздействия на постоянный магнит.
Кроме того, подвижный постоянный магнит 4 связан со средствами отдаления, входящими в состав устройства приложения усилия, которые стремятся отдалить магнит от магнитного тормоза 2а.
Средства отдаления удерживают подвижный магнитный элемент (в данном случае магнит) в положении, отдаленном от магнитного тормоза 2а, когда средства отдаления получают питание электрическим током, как показано на фиг. 5а.
Поскольку магнит находится в положении отдаления от магнитного тормоза 2а, магнитное поле, создаваемое в объемах, занимаемых магнитореологической текучей средой магнитного тормоза 2а, является недостаточным для намагничивания указанной магнитореологической текучей среды.
В данном случае средства отдаления представляют собой соленоид 5а. Магнитную полярность соленоида выбирают таким образом, чтобы, когда электрический ток проходит через клеммы соленоида, последний действовал магнитостатической силой на подвижный постоянный магнит 4, которая стремится удерживать его в зоне, где соленоид создает магнитное поле, то есть чтобы создавать силу возврата подвижного постоянного магнита 4 в направлении соленоида 5а.
Когда через соленоид проходит электрический ток, он работает, противодействуя возвратным средствам, в данном случае противодействует пружине. Индукция магнитного поля, генерируемого соленоидом, увеличивается вместе с силой проходящего через него электрического тока.
Соленоид рассчитывают по параметрам таким образом, чтобы магнитостатическая сила, которой он действует на подвижный постоянный магнит 4 в направлении отдаления от пружины, превышала возвратную силу, создаваемую пружиной.
Соленоид 5а получает питание от того же источника электрического тока, что и привод 13а силовой обратной связи, то есть от источника 14 тока (на фиг. 5а не показан).
Например, электрическое соединение соединяет соленоид 5а и привод 13а силовой обратной связи, и соленоид получает питание током через это электрическое соединение.
Предпочтительно соленоид расположен противоположно к магнитному тормозу 2а по отношению к подвижному магнитному элементу, то есть в данном случае по отношению к подвижному постоянному магниту 4.
Предпочтительно соленоид 5а связан с магнитным контуром 6.
Магнитный контур 6 жестко соединен с корпусом летательного аппарата. Когда подвижный постоянный магнит 4 находится вблизи магнитного контура 6, магнитный контур 6 направляет магнитное поле, производимое подвижным постоянным магнитом 4.
В данном примере магнитный контур 6 имеет U-образную форму и содержит прямолинейное центральное тело, на уровне которого расположен соленоид 5а, а также две боковые ветви. Таким образом, магнитный контур 6 расположен с двух сторон от соленоида 5а. Обе боковые ветви проходят от центрального тела к тормозу.
Расстояние между двумя боковыми ветвями магнитного контура 6 превышает длину подвижного постоянного магнита 4 вдоль оси С. Таким образом, обе боковые ветви образуют полость, в которую заходит подвижный постоянный магнит 4, когда магнит находится в положении, отдаленном от магнитного тормоза 2а.
Когда магнитный контур 6 направляет магнитное поле магнита, подвижный постоянный магнит 4 излучает ничтожное магнитное поле на уровне объемов, занимаемых магнитореологической текучей средой в магнитном тормозе 2а.
Таким образом, магнитный контур 6 обеспечивает, чтобы, когда подвижный постоянный магнит 4 находится в отдаленном положении относительно магнитного тормоза 2а, показанном на фиг. 5а, подвижный постоянный магнит 4 не участвовал в намагничивании магнитореологической текучей среды.
В альтернативном варианте устройство приложения усилия может не иметь магнитного контура. Диапазон перемещения подвижного постоянного магнита 4 должен быть в этом случае достаточно большим, чтобы под действием средств отдаления магнит мог достигать положения, достаточно отдаленного от магнитного тормоза 2а, чтобы магнитное поле, которым действует магнит на магнитореологическую текучую среду, было ничтожным.
Электромагнит 3 является факультативным и позволяет моделировать правило демпфирования на рычаге через магнитный тормоз 2а во время нормальной работы ручки управления. Электромагнит 3 расположен вблизи тормозных дисков, содержащихся в магнитном тормозе 2а. Электромагнит 3 создает магнитное поле, меняющееся в зависимости от электрического тока, подаваемого на его клеммы.
Предпочтительно электромагнит 3 закреплен на корпусе летательного аппарата. Таким образом, электромагнит 3 неподвижно соединен с корпусом летательного аппарата.
Если магнитный тормоз 2а используют исключительно с целью обеспечения механического дублирования или “backup” для привода 13а силовой обратной связи, в электромагните 3 нет необходимости.
На фиг. 5b схематично показан магнитный тормоз 2а и средства приведения в действие в положении, отличном от положения, показанного на фиг. 5а.
Показанный на фиг. 5b магнитный тормоз 2а приведен в действие. Активированное положение тормоза соответствует электрической неисправности, затрагивающей привод 13а силовой обратной связи (на фигуре не показан).
В состоянии, показанном на фиг. 5b, источник 14 тока имеет неисправность. Следовательно, привод 13а силовой обратной связи и средства 5а отдаления (в данном случае соленоид) находятся в ситуации отсутствия тока.
Соленоид не активирован и, следовательно, не действует магнитостатической силой на подвижный постоянный магнит 4. Соленоид не воздействует на постоянный магнит 4 в направлении отдаления относительно магнитного тормоза 2а.
Под действием возвратных средств, в данном случае пружины 7, которая работает на растяжение, подвижный постоянный магнит 4 достигает в равновесном состоянии положения, близкого к магнитному тормозу 2а.
Следовательно, подвижный постоянный магнит 4 не удерживается на отдалении от тормоза, когда средства отдаления, в данном случае соленоид, не получают питания током.
В близком от магнитного тормоза 2а положении подвижный постоянный магнит 4 генерирует магнитное поле, пересекающее магнитореологическую текучую среду. Это поле фиксирует указанную текучую среду и производит блокировку дисков. Предпочтительно магнит выполнен с возможностью создавать в объемах, занимаемых магнитореологической текучей средой, магнитное поле с индукцией, превышающей заранее определенный порог, составляющий от 0,1 до 10 тесла. Заранее определенный порог соответствует полю, необходимому для намагничивается магнитореологической текучей среды и для соединения входного вала и выходного вала магнитного тормоза 2а.
С учетом прекращения или нарушения в подаче электрического тока на соленоид, магнитный тормоз 2а срабатывает пассивно. На вал А1 действует усилие сопротивления, противодействующее вращению рычага 1 вокруг оси крена Х.
Пример работы устройства приложения усилия
Далее следует описание работы ручки управления, содержащей устройство приложения усилия, показанное на фиг. 5а и 5b, при появлении неисправности, затрагивающей источник тока привода 13 силовой обратной связи крена. При этом магнитный тормоз 2а выполняет роль механического дублирования для привода 13а силовой обратной связи, чтобы препятствовать вращению рычага ручки управления вокруг оси крена Х.
Понятно, что, если устройство приложения усилия содержит привод 13b силовой обратной связи тангажа и соответствующий тормоз, устройство приложения усилия выполняет аналогичную работу для оказания механического дублирования приводу тангажа.
Перед появлением неисправности устройство находится в состоянии, показанном на фиг. 5а.
При электрической неисправности, затрагивающей источник 14 тока, в данном случае при общем отключении электричества, средства 5а отдаления оказываются затронутыми в той же степени, что и привод 13а силовой обратной связи. В альтернативном варианте неисправностью может быть нарушение в обработке или передаче командных сигналов, содержащих заданное значение усилия для привода. Средства 5а отдаления не создают при этом достаточной силы отдаления на постоянном магните 4, чтобы удерживать его в отдаленном от тормоза положении. Например, средства 5а отдаления отключены.
Что касается пружины 7, то на нее не действует электрическая неисправность. Поэтому сохраняется возвратная сила, действующая на постоянный магнит 4 в направлении D (показано на фиг. 5b). Происходит перемещение магнита в сторону тормоза.
Диапазон перемещения магнита рассчитывают таким образом, чтобы магнит достигал положения, в котором он действует сильным магнитным полем на магнитореологическую текучую среду магнитного тормоза 2а.
В частности, в случае, когда устройство приложения усилия содержит магнитный контур 6, постоянный магнит 4 перемещается за пределы магнитного контура при прекращении питания электрическим током средств 5а отдаления.
Под действием этого магнитного поля повышается сопротивление сдвигу магнитореологической текучей среды внутри магнитного тормоза 2а. Тормоз активируется.
Параметры тормоза рассчитаны таким образом, чтобы после его активации рычаг оказался блокированным от поворота по оси крена под действием сопротивления сдвигу магнитореологической текучей среды. Предпочтительно устройство приложения усилия имеет другой тормоз, чтобы блокировать рычаг также по оси тангажа.
Факультативно, после блокировки ручка управления переходит в режим управления по усилию.
В режиме управления по усилию датчик 17а усилия крена и датчик 17b усилия тангажа заменяют собой датчики 18а и 18b положения и/или скорости по осям крена и тангажа рычага для управления подвижными частями летательного аппарата. Во время действия режима управления по усилию рычаг остается заблокированным.
Затем режим управления по усилию можно отключить, как только будет решена проблема электрической неисправности источника тока привода силовой обратной связи.
Таким образом, магнитный тормоз образует механический дублирующий канал, не дающий ручке управления поворачиваться в режиме, в котором пилот может свободно поворачивать рычаг. Магнитный тормоз блокирует кинематическую цепь рычага.
В альтернативном варианте магнитный тормоз можно применять с правилом усилия, действующего на рычаг, в случае нормальной работы ручки управления. В этом случае магнитный тормоз не активируется только в случае прекращения электрического питания средств отдаления постоянного магнита. Тормоз участвует в обратном усилии в дополнение к электрическим приводам силовой обратной связи.
Описанная выше работа устройства приложения усилия представляет интерес, поскольку приведение в действие магнитного тормоза или магнитных тормозов в случае электрической неисправности является пассивным. Нет необходимости в каком-либо человеческом вмешательстве или в каком-либо специальном органе управления, который должен был бы иметь свой собственный отдельный источник питания.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВЕРЬ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2652575C2 |
| ДВИГАТЕЛЬНАЯ УСТАНОВКА | 2000 |
|
RU2190115C2 |
| БОКОВАЯ РУЧКА УПРАВЛЕНИЯ САМОЛЕТОМ | 2014 |
|
RU2571992C1 |
| ТРАНСМИССИЯ С УСТРОЙСТВОМ ПОСТЕПЕННОГО ЗАПУСКА, В ЧАСТНОСТИ, ДЛЯ АВТОМОБИЛЯ | 1994 |
|
RU2133896C1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2016 |
|
RU2652284C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2673755C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО С УПРАВЛЯЕМОЙ ТЕКУЧЕЙ СРЕДОЙ | 1999 |
|
RU2211151C2 |
| МАГНИТОРЕОЛОГИЧЕСКИЙ ВИБРОИЗОЛЯТОР С РЕГУЛИРОВАНИЕМ ПОСРЕДСТВОМ УЛЬТРАЗВУКОВОГО ДВИГАТЕЛЯ | 2020 |
|
RU2781779C1 |
| СИСТЕМА ПОДВИЖНОСТИ КАБИНЫ ПИЛОТАЖНОГО ТРЕНАЖЕРА ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2247432C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ И ВЫПОЛНЕННАЯ С ПОДОБНЫМ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ КЛАПАННАЯ СИСТЕМА | 2009 |
|
RU2548137C1 |
Изобретение относится к устройствам пилотирования и касается активной ручки управления, содержащей встроенную силовую обратную связь. Устройство содержит вал и рычаг управления, магнитный тормоз, привод силовой обратной связи, источник тока привода, подвижный магнитный элемент, средства отдаления. Привод действует усилием сопротивления, противодействующим вращению вала вокруг оси. Магнитный тормоз содержит тормозную деталь, соединенную с валом, и объем, содержащий реологическую текучую среду, контактирующую с тормозной деталью. При этом сопротивление сдвигу реологической текучей среды меняется в зависимости от магнитного поля. Подвижный магнитный элемент излучает магнитное поле в объеме, и при этом подвергается воздействию, направленному в сторону близкого положения к магнитному тормозу. Средства отдаления выполнены с возможностью удерживать подвижный магнитный элемент в отдаленном положении при получении питания электрическим током и выполнены с возможностью не удерживать подвижный магнитный элемент в отдаленном положении, когда средства отдаления не получают питания. Достигается автоматическое и пассивное срабатывание магнитного тормоза в случае неисправности, затрагивающей источник тока, создание аварийного дублирующего канала без потери обратной связи, повышение безопасности. 3 н. и 13 з.п. ф-лы, 6 ил.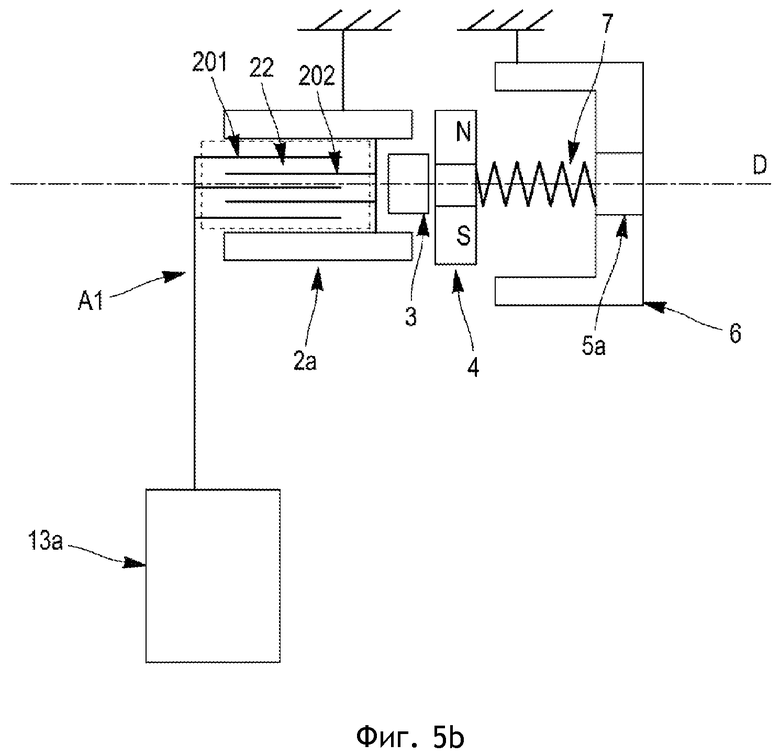
1. Устройство приложения усилия для ручки управления летательным аппаратом, при этом ручка управления содержит вал (А1) и рычаг (1) управления, выполненный с возможностью приведения во вращение вала (А1) вокруг первой оси (А), при этом устройство включает в себя:
- магнитный тормоз (2а), содержащий:
- тормозную деталь (201), выполненную с возможностью соединения с валом (А1), и
- объем, содержащий реологическую текучую среду (22), контактирующую с тормозной деталью, при этом сопротивление сдвигу реологической текучей среды меняется в зависимости от магнитного поля, действующего на реологическую текучую среду,
- привод (13а) силовой обратной связи, выполненный с возможностью действовать усилием сопротивления, противодействующим вращению вала (А1) вокруг первой оси (А),
- источник (14) тока привода (13а) силовой обратной связи,
при этом устройство отличается тем, что содержит:
- подвижный магнитный элемент (4), имеющий положение, близкое к магнитному тормозу, и положение, отдаленное от магнитного тормоза, при этом в близком положении подвижный магнитный элемент излучает магнитное поле в указанном объеме, причем подвижный магнитный элемент (4) подвергается воздействию, направленному в сторону близкого положения,
- средства (5а) отдаления, выполненные с возможностью удерживать подвижный магнитный элемент (4) в отдаленном положении, когда средства отдаления получают питание электрическим током от источника (14) тока, и выполненные с возможностью не удерживать подвижный магнитный элемент в отдаленном положении, когда средства отдаления не получают питания.
2. Устройство приложения усилия по п.1, дополнительно содержащее возвратные средства (7), выполненные с возможностью действовать возвратным усилием на подвижный магнитный элемент (4), которое стремится переместить магнитный элемент в близкое положение, при этом возвратное усилие меньше усилия отдаления, которым средства (5а) отдаления действуют на подвижный магнитный элемент (4), когда эти средства отдаления получают питание.
3. Устройство приложения усилия по любому из пп.1 или 2, в котором средства (5а) отдаления содержат соленоид, при этом соленоид предпочтительно расположен напротив магнитного тормоза (2а) по отношению к подвижному магнитному элементу (4).
4. Устройство приложения усилия по п.2, в котором средства отдаления содержат магнитный контур (6), образующий полость, при этом контур выполнен так, чтобы в отдаленном положении подвижный магнитный элемент (4) заходил в полость.
5. Устройство приложения усилия по любому из пп.1-4, в котором реологическая текучая среда (22) содержит магнитореологическую текучую среду или магнитный порошок.
6. Устройство приложения усилия по любому из пп.1-5, в котором ручка управления содержит корпус, при этом магнитный тормоз (2а) содержит неподвижную деталь (202), установленную на корпусе, при этом неподвижная деталь ограничивает вместе с тормозной деталью (201) объем (220).
7. Устройство приложения усилия по любому из пп.1-6, в котором подвижный магнитный элемент (4) содержит постоянный магнит.
8. Устройство приложения усилия по п.7, в котором тормозная деталь содержит тормозной диск (201), расположенный в плоскости расширения, при этом постоянный магнит расположен вдоль оси (С), перпендикулярной к плоскости расширения.
9. Устройство приложения усилия по любому из пп.1-8, в котором подвижный магнитный элемент (4) выполнен с возможностью создавать в объеме (220) магнитное поле с индукцией, превышающей порог, составляющий от 0,1 до 10 тесла.
10. Устройство приложения усилия по любому из пп.1-9, также содержащее электромагнит (3), выполненный с возможностью создавать переменное магнитное поле в объеме (220).
11. Устройство приложения усилия по любому из пп.1-10, также содержащее механическую муфту (12), жестко соединенную с рычагом (1) и вращающуюся вместе с ним вокруг второй оси (Х), и содержащее датчик (17а) усилия, выполненный с возможностью действовать крутящим моментом на механическую муфту (12) вокруг второй оси.
12. Устройство приложения усилия по любому из пп.1-11, в котором рычаг (1) управления приводит также во вращение дополнительный вал (А2) вокруг третьей оси (В), при этом устройство также содержит:
- дополнительный магнитный тормоз (2b), выполненный с возможностью действовать усилием сопротивления, чтобы препятствовать вращению дополнительного вала вокруг третьей оси, при этом указанный дополнительный тормоз содержит дополнительный объем реологической текучей среды,
- дополнительный привод (13b) силовой обратной связи, выполненный с возможностью создавать усилие сопротивления, противодействующее вращению дополнительного вала вокруг третьей оси,
- дополнительный подвижный магнитный элемент, имеющий положение, близкое к дополнительному тормозу, и положение, отдаленное от дополнительного тормоза, при этом дополнительный подвижный магнитный элемент излучает в близком положении магнитное поле в дополнительный объем реологической текучей среды, при этом дополнительный подвижный магнитный элемент подвергается воздействию, направленному в сторону положения, близкого к дополнительному тормозу,
- дополнительные средства (5b) отдаления, выполненные с возможностью удерживать дополнительный подвижный магнитный элемент в положении, отдаленном от дополнительного тормоза.
13. Активная ручка управления летательным аппаратом, содержащая:
- устройство приложения усилия по любому из пп.1-12,
- подвижный вал (А1), выполненный с возможностью вращаться вокруг первой оси (А) и связанный с тормозной деталью (201) устройства приложения усилия,
- подвижный рычаг (1) управления, выполненный с возможностью вращаться вокруг второй оси (Х), при этом вращение вала (А1) вокруг первой оси (А) связано с вращением рычага (1) управления вокруг второй оси (Х).
14. Ручка по п.13, дополнительно содержащая вычислительное устройство (15), выполненное с возможностью передавать командный сигнал на привод (13а) силовой обратной связи, при этом усилие сопротивления, создаваемое на валу (А1) приводом (13а) силовой обратной связи во время работы ручки, является функцией заданного значения усилия, закодированного в командном сигнале.
15. Ручка по п.14, в которой источник (14) тока привода (13а) силовой обратной связи выполнен с возможностью питания током вычислительного устройства (15), при этом средства (5а) отдаления выполнены с возможностью своего отключения в случае электрической неисправности, затрагивающей вычислительное устройство (15).
16. Использование устройства приложения усилия по любому из пп.1-12, чтобы во время электрической неисправности, затрагивающей источник (14) тока привода (13а) силовой обратной связи, препятствовать вращению вала (А1) вокруг первой оси (А).
| СПОСОБ ПОЛУЧЕНИЯ СОРБЕНТА-КАТАЛИЗАТОРА | 1994 |
|
RU2081822C1 |
| US 20180197385 А1, 12.07.2018 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2643856C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ ВОЗДУШНОГО СУДНА С ЗАЩИЩЕННЫМ ДАТЧИКОМ УСИЛИЙ И ВОЗДУШНОЕ СУДНО, СНАБЖЕННОЕ ТАКИМ УСТРОЙСТВОМ | 2013 |
|
RU2631720C2 |

