Предлагаемое изобретение относится к способу стабилизации скорости вращения гидравлической машины с S-характеристиками, то есть машины, имеющей S-образную зависимость между крутящим моментом и скоростью вращения. Обычные гидравлические машины с S-характеристиками представляют собой турбонасосы, работающие в режиме турбины или турбины Френсиса, выполненной с возможностью работы с высоким полезным напором. Предлагаемое изобретение также относится к установке для преобразования гидравлической энергии в электрическую энергию, с помощью которой может быть осуществлен заявленный способ.
Во время запуска турбонасоса в режиме турбины скорость вращения его рабочего колеса должна быть стабилизирована для обеспечения возможности подключения данной машины к сети. В идеальном случае скорость вращения машины синхронизируют с частотой сети. Кроме того, работой турбонасоса управляют так, чтобы обеспечить работу турбины в безнагрузочной рабочей точке, в которой момент, приложенный потоком воды к рабочему колесу, равен нулю.
При небольшом напоре воды может быть затруднительно обеспечить стабилизацию скорости вращения по причине наличия "S-зон". "S-зоны" представляют собой зоны, которые видны на графике, иллюстрирующем момент в зависимости от скорости вращения машины. На таком графике видно, что кривая момента, построенная в зависимости от скорости вращения, может быть S-образной, что указывает на то, что безнагрузочная рабочая точка является нестабильной. Это означает, что незначительное отклонение в значении скорости вращения машины относительно оптимальной рабочей точки влечет за собой значительное увеличение момента, приложенного потоком воды к рабочему колесу турбонасоса, что в результате существенно увеличивает или уменьшает скорость вращения машины. В таких условиях невозможно стабилизировать скорость вращения гидравлической машины, используя обычный ПИД-контур.
Известно, что для решения описанной проблемы необходимо полностью изменить конструкцию гидравлических частей машины, например, конструкцию рабочего колеса или направляющих лопаток. В частности, конструкцию гидравлических частей машины изменяют так, чтобы избежать наличия S-зон в рабочем диапазоне турбонасоса при работе в режиме турбины. Рабочий диапазон машины соответствует интервалу между нижним полным напором и верхним полным напором установки, содержащей данную машину. Однако это решение является очень дорогостоящим для реализации и способствует ухудшению эксплуатационных характеристик турбонасоса.
Другое решение заключается в оснащении турбонасоса несинхронизированными направляющими лопатками. Это означает, что некоторые направляющие лопатки могут быть ориентированы независимо друг от друга. В результате при запуске машины некоторые направляющие лопатки находятся в более открытом положении, чем другие, что временно изменяет параметры работы машины. Однако, несмотря на то что это позволяет избежать наличия S-зон в рабочем диапазоне машины, данное решение способствует возникновению нежелательных вибраций, которые влияют на срок службы машины.
Цель заявленного изобретения состоит в устранении указанного недостатка благодаря способу стабилизации скорости вращения гидравлической машины, который является более дешевым по сравнению с известными способами и не влияет на работу машины.
Известны способы регулирования скорости вращения гидравлической машины во время ее работы.
Так, в патентном документе US 4640664 раскрыт способ управления работой многоступенчатой гидравлической машины для обеспечения заданного регулирования расхода потока при нормальном режиме работы. Гидравлическая машина, такая как двухступенчатый турбонасос, содержит рабочее колесо, установленное на валу турбины, и подвижные направляющие лопатки, которые имеют переменное проходное сечение и расположены в обратном канале, образованном камерой рабочего колеса. В способе согласно US 4640664 выполняют регулирование проходного сечения лопаток одной из двух ступеней машины с получением сечения, соответствующего заданному расходу потока и удовлетворяющего соотношению между проходными сечениями лопаток для обеспечения высокоэффективной работы при заданном напоре, и регулирование проходного сечения лопаток другой из указанных двух ступеней с получением сечения, удовлетворяющего соотношению между проходными сечениями лопаток ступеней для поддержания гидравлически стабильной работы при заданном напоре.
В патентном документе JPH 01208572 раскрыт способ работы гидравлической машины с переменной скоростью вращения. Машина, такая как турбонасос, содержит вал, генератор с переменной скоростью вращения, предназначенный для преобразования вращения указанного вала в выходную электрическую мощность, и направляющие лопатки, имеющие переменное проходное сечение. В способе согласно JPH 01208572 выполняют сравнение фактической выходной мощности генератора с заданным выходным значением для вычисления заданного значения проходного сечения лопаток и корректируют скорость вращения с достижением заданного значения скорости вращения, соответствующего заданному выходному значению для обеспечения работы машины с максимальной эффективностью.
В указанных документах гидравлическая машина не характеризуется S-образной зависимостью между скоростью вращения и крутящим моментом, при которой, как отмечено выше, незначительное отклонение в значении скорости вращения влечет за собой значительное увеличение крутящего момента, что в результате существенно увеличивает или уменьшает скорость вращения машины. Соответственно, регулирование вышеописанными известными способами не позволяет обеспечить надежную стабилизацию скорости вращения такой машины и, следовательно, подключить ее к электрической сети без оказания влияния на работу машины.
Исходя из вышеизложенного, задачей заявленного изобретения является создание способа, обеспечивающего возможность синхронизации установки, имеющей S-образную зависимостью между крутящим моментом и скоростью вращения, с электрической сетью. Данная задача решается путем регулирования проходного сечения между направляющими лопатками машины исходя из заданного значения сечения, определенного для теоретической ситуации, когда машина вращается с известной заданной скоростью, необходимой для синхронизации с сетью.
Таким образом, настоящее изобретение относится к способу стабилизации скорости вращения гидравлической машины с S-образными характеристическими кривыми для обеспечения возможности подключения данной машины к сети, причем указанная гидравлическая машина содержит рабочее колесо и распределитель, расположенный вокруг указанного рабочего колеса и содержащий подвижные направляющие лопатки. Заявленный способ включает этапы, на которых:
a) рассчитывают заданный полезный напор и заданное значение проходного сечения для изменения положения направляющих лопаток машины, причем заданный полезный напор и заданное значение проходного сечения рассчитывают для ситуации, когда крутящий момент, создаваемый потоком воды на рабочем колесе машины, равен нулю и машина вращается с заданной скоростью вращения, необходимой для синхронизации машины с электрической сетью и рассчитанной на основании частоты сети,
b) определяют фактический полезный напор, действующий в машине,
c) сравнивают заданный полезный напор с фактическим полезным напором и
d) регулируют проходное сечение направляющих лопаток для получения заданного проходного сечения и уменьшения разницы по высоте между заданным полезным напором и фактическим полезным напором.
Благодаря заявленному изобретению скорость вращения гидравлической машины стабилизируют путем регулирования полезного напора установки. Действительно, стабилизация полезного напора приводит к стабилизации скорости вращения машины. Более точно, полезным напором установки управляют для достижения заданного полезного напора, а проходным сечением направляющих лопаток управляют для получения заданного значения проходного сечения. Заданное значение проходного сечения и заданный полезный напор являются расчетными значениями, при которых скорость вращения машины теоретически будет соответствовать требуемой скорости вращения, рассчитанной на основании частоты сети, и при которых на указанную машину не действует момент, создаваемый потоком воды. В результате стабилизация полезного напора при указанном заданном полезном напоре обеспечивает скорость вращения машины, близкую по значению к заданной скорости вращения. Соответственно, обеспечивается возможность синхронизации машины с сетью при помощи синхронизатора.
Другие аспекты предлагаемого изобретения, которые являются предпочтительными, но не обязательными, приведены ниже.
Предлагаемый способ также включает этапы, на которых:
e) измеряют фактическую скорость вращения машины,
f) сравнивают фактическую скорость вращения с заданной скоростью вращения,
при этом на этапе d) проходное сечение направляющих лопаток регулируют также для уменьшения разницы между заданной и фактической скоростями вращения;
- на этапе d) проходное сечение направляющих лопаток регулируют на основании расчета контрольного проходного сечения для изменения положения направляющих лопаток;
- контрольное проходное сечение рассчитывают путем суммирования заданного значения проходного сечения с первым значением отклонения проходного сечения, определяемым на основании разницы по высоте между заданным полезным напором и фактическим полезным напором, и со вторым значением отклонения проходного сечения, определяемым на основании разницы между заданной скоростью вращения и фактической скоростью вращения;
- первое значение отклонения проходного сечения получают с помощью первого корректирующего модуля, в котором в качестве входного значения принята разница по высоте между заданным полезным напором и фактическим полезным напором;
- первый корректирующий модуль представляет собой пропорциональный дифференциальный корректор;
- второе значение отклонения проходного сечения получают с помощью второго корректирующего модуля, в котором в качестве входного значения принята разница между заданной скоростью вращения и фактической скоростью вращения;
- второй корректирующий модуль представляет собой пропорциональный интегральный дифференциальный корректор.
Предлагаемое изобретение также относится к установке для преобразования гидравлической энергии в электрическую энергию, которая содержит машину, содержащую рабочее колесо и распределитель, расположенный вокруг рабочего колеса и содержащий регулируемые направляющие лопатки и средство для определения фактического полезного напора установки. Установка также содержит:
- средство для расчета заданного полезного напора и заданного значения проходного сечения для изменения положения направляющих лопаток машины, причем заданный полезный напор и заданное значение проходного сечения рассчитывают для ситуации, когда крутящий момент, создаваемый потоком воды на рабочем колесе машины, равен нулю и машина вращается с заданной скоростью вращения, необходимой для синхронизации машины с электрической сетью и рассчитанной на основании частоты сети,
- средство для сравнения заданного полезного напора с фактическим полезным напором, который действует в указанной машине,
- средства для регулирования проходного сечения направляющих лопаток для получения заданного значения проходного сечения и уменьшения разницы по высоте между заданным полезным напором и фактическим полезным напором.
В соответствии с одним предпочтительным, но необязательным аспектом указанная установка также содержит:
- средство для расчета заданной скорости вращения машины,
- средство для измерения фактической скорости вращения машины,
- средство для сравнения фактической скорости вращения с заданной скоростью вращения,
причем средства для регулирования проходного сечения направляющих лопаток выполнены с возможностью уменьшения разницы между заданной скоростью вращения и фактической скоростью вращения.
Далее предлагаемое изобретение описано в соответствии с прилагаемыми чертежами, на которых показан иллюстративный пример, не ограничивающий объем правовой охраны предлагаемого изобретения.
На чертежах:
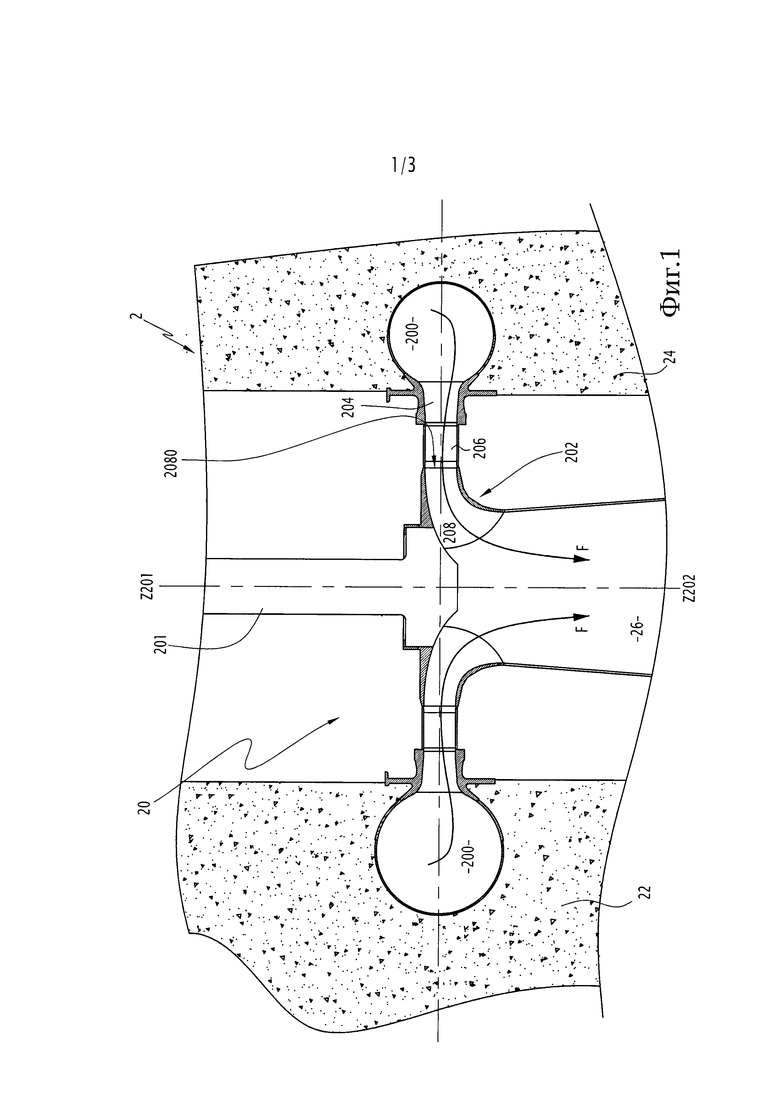
- Фиг.1 схематично изображает разрез установки для преобразования гидравлической энергии в электрическую энергию согласно заявленному изобретению;
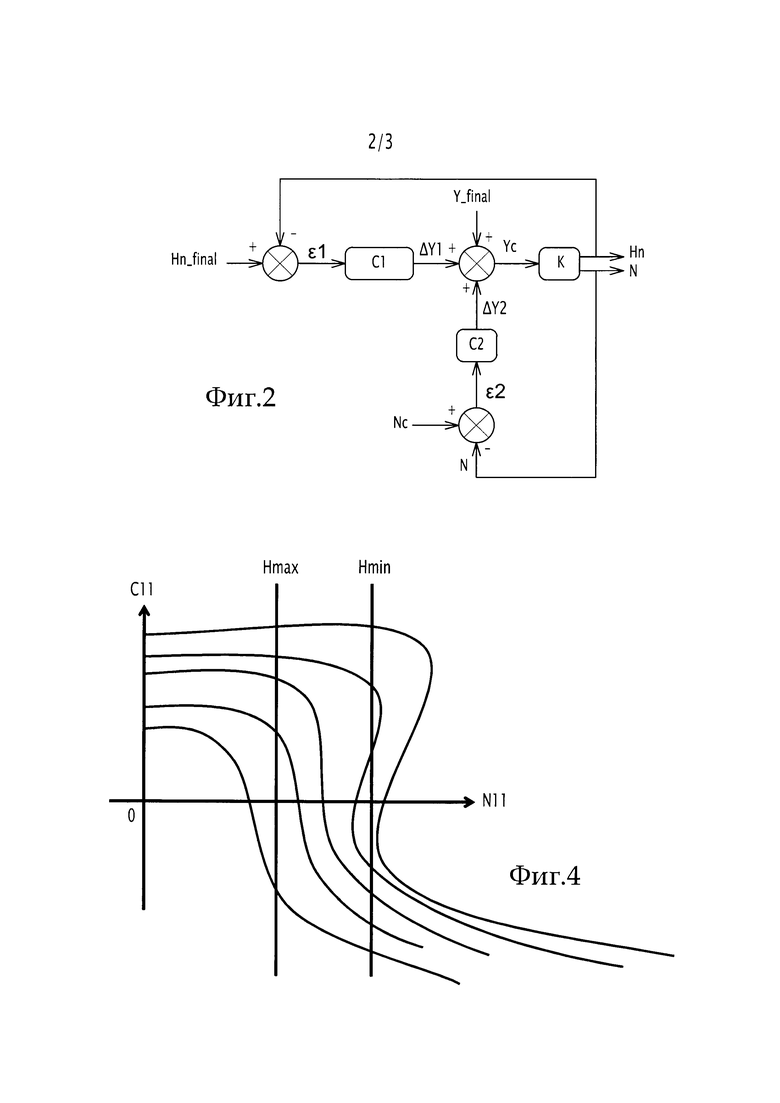
- Фиг.2 изображает схему управления, иллюстрирующую заявленный способ согласно настоящему изобретению, в соответствии с которым стабилизируют скорость вращения турбонасоса, входящего в состав установки, показанной на Фиг.1;
- Фиг.3 изображает график, на котором построены кривые, иллюстрирующие зависимость полезного напора, скорости вращения и контрольного значения проходного сечения направляющих лопаток от времени в установке, показанной на Фиг.1;
- Фиг.4 изображает график, на котором проиллюстрированы характеристики турбонасоса, работающего в режиме турбины и входящего в состав установки, показанной на Фиг.1.
Фиг.1 изображает установку 2 для преобразования гидравлической энергии в электрическую энергию. Установка 2 содержит гидравлическую машину. Согласно данному примеру гидравлическая машина представляет собой турбонасос 20, который, работая в режиме турбины, использует гидравлическую энергию для обеспечения вращения вала 201. Вал 201 соединен с генератором переменного тока для производства электроэнергии.
Далее описано функционирование турбонасоса 20 в режиме турбины. Турбонасос 20 содержит спиральную камеру 200, поддерживаемую бетонными блоками 22 и 24. Между расположенным выше по потоку резервуаром (не показан на чертежах) и спиральной камерой 200 проходит напорный туннель (не показан на чертежах). Данный напорный туннель выполнен с возможностью обеспечения принудительного потока F воды для приведения в действие машины 20. Машина 20 содержит рабочее колесо 202, окруженное спиральной камерой 200 и содержащее лопатки 208, между которыми при работе турбонасоса перетекает вода. В результате, рабочее колесо 202 вращается вокруг оси Z202, наложенной на ось Z201 вращения вала 201.
Вокруг рабочего колеса 202 расположен распределитель, содержащий подвижные направляющие лопатки 206, равномерно распределенные вокруг рабочего колеса 202. Выше по потоку от данного распределителя вокруг него расположен предварительный распределитель, образованный неподвижными лопатками 204, равномерно распределенными вокруг оси Z202 вращения рабочего колеса 202.
Под рабочим колесом 202 расположена приемная труба 26, обеспечивающая выпуск воды ниже по потоку.
Каждая из направляющих лопаток 206 указанного распределителя имеет регулируемый шаг вокруг оси, параллельной оси Z202 вращения рабочего колеса 202. Соответственно, обеспечена возможность поворота лопаток для регулирования расхода воды. Все направляющие лопатки 206 сориентированы под одним углом относительно закрытого положения. Другими словами, указанные лопатки синхронизированы.
С11 и N11 - характеристические параметры турбонасоса 20. Они получены из следующих уравнений:
 и
и
 ,
,
где С - крутящий момент, создаваемый потоком F воды на рабочем колесе 202, D - диаметр рабочего колеса 202, а Н - полезный напор установки 2.
Фиг.4 изображает кривые, иллюстрирующие параметр С11 в зависимости от параметра N11. Каждая из указанных кривых соответствует определенной ориентации направляющих лопаток 206.
Как видно на Фиг.4, рабочий диапазон машины 20, который соответствует интервалу между нижним и верхним значениями полного напора установки 2, ограничен двумя вертикальными линиями Hmin и Hmax, соответствующими нижнему и верхнему значениям полного напора установки 2.
Как показано на данной фигуре, гидравлическая машина 20 имеет S-характеристики. Действительно, при небольшом напоре воды кривые параметра С11, построенные в зависимости от параметра N11, являются S-образными. В этих условиях безнагрузочная рабочая точка, то есть точка, в которой на рабочее колесо 202 не действует момент, и в которой скорость вращения машины 20 соответствует требуемой или заданный скорости Nc, является нестабильной. Таким образом, невозможно стабилизировать скорость вращения машины при требуемой скорости Nc с помощью обычных регуляторов.
Далее в данном документе со ссылкой на Фиг.2 приведено описание способа стабилизации скорости вращения рабочего колеса 202 в "S-зонах" во время запуска машины для обеспечения синхронизации машины 20 с сетью.
Как показано на Фиг.2, данный способ может быть осуществлен посредством системы с замкнутым контуром.
Как указано в данном документе, полезный напор представляет собой разницу между давлением воды выше по потоку от машины и давлением воды ниже по потоку указанной машины.
На первом этапе заявленного способа рассчитывают заданный полезный напор Hn_final, который необходимо получить, и заданное значение Y_final проходного сечения для изменения положения направляющих лопаток 206. Заданный полезный напор Hn_fmal и заданное значение Y_final проходного сечения численно определяют, исходя из того, что теоретически крутящий момент, создаваемый потоком F воды на рабочем колесе 202, равен нулю, а машина вращается с требуемой скоростью Nc. Значения Y_fmal и Hn_final рассчитывают в зависимости от полного напора, с учетом конструкции установки и потерь на трение.
На втором этапе заявленного способа определяют фактический полезный напор Hn установки, который соответствует значению полезного напора в любой момент времени. Например, указанный фактический полезный напор Hn может быть измерен при помощи датчиков давления, расположенных выше и ниже по потоку от машины 20. Затем заданный полезный напор Hn_final и фактический полезный напор Hn сравнивают с помощью компаратора. Для определения контрольного значения Yc проходного сечения для изменения положения направляющих лопаток 206 в качестве входного значения используют разницу ε1 по высоте между заданным полезным напором Hn_final и фактическим полезным напором Hn. Более точно, разница ε1 по высоте является входным значением для первого корректирующего модуля С1. В рассматриваемом примере С1 - пропорциональный дифференциальный корректор, но он также может представлять собой пропорциональный корректор или корректор любого другого типа. С помощью указанного первого корректора С1 получают первое значение отклонения ΔY1 проходного сечения для изменения положения направляющих лопаток 206 так, чтобы уменьшить значение ε1. Благодаря корректору С1 обеспечивается возможность повысить стабильность и скорость работы системы.
Скорость N вращения машины может быть стабилизирована только путем обеспечения стабильного значения полезного напора Hn при достижении заданного полезного напора Hn_final. Значения Hn_fmal и Y_final являются исключительно теоретическими. Таким образом, когда обеспечено установившееся значение полезного напора Hn при достижении им окончательного значения Hn_final, машина 20 вращается приблизительно с заданной скоростью Nc вращения. Машина может быть синхронизирована с сетью, но для этого необходимо регулировать скорость вращения вала 201, соединенного с генератором переменного тока, для получения напряжения с соответствующей частотой и фазой. Например, для небольшого ускорения или замедления скорости вращения машины и устранения фазового сдвига могут быть использованы синхронизаторы. На практике машина 20 может быть синхронизирована с допуском +/-0,2% по скорости. Что касается крутящего момента, для него нет критерия, поскольку синхронизация возможна при крутящем моменте, отличном от нуля.
Для того, чтобы избежать указанного дополнительного этапа, заявленный способ включает этапы, на которых регулируют скорость N вращения машины. Скорость N вращения рабочего колеса 20 измеряют и сравнивают с заданной скоростью Nc вращения. Для определения контрольного значения Yc проходного сечения в качестве входного значения используют разницу ε2 между заданной скоростью Nc вращения и измеренной скоростью N вращения. Более точно, разница ε2 в скорости является входным значением для второго корректирующего модуля С2. В общем случае С2 представляет собой пропорциональный интегральный дифференциальный корректор, гарантирующий нулевую установившуюся ошибку. Согласно данному примеру С2 представляет собой интегральный корректор. Это означает, что обеспечена возможность точного управления скоростью N вращения турбонасоса 20. С помощью указанного второго корректора С2 получают второе значение отклонения ΔY2 проходного сечения для изменения положения направляющих лопаток 206 и для уменьшения значения ε2.
Значения отклонения ΔY1, ΔY2 и контрольное значение Yc проходного сечения являются динамическими параметрами, а заданное значение Y_final проходного сечения и заданный полезный напор Hn_final являются статическими параметрами.
Контрольное значение Yc проходного сечения рассчитывают путем суммирования заданного значения Y_final проходного сечения с первым значением отклонения ΔY1 проходного сечения и вторым значением отклонения ΔY2 проходного сечения. Таким образом, обеспечивается возможность регулировать проходное сечение направляющих лопаток 206 для получения заданного значения Y_fmal проходного сечения и уменьшения разницы ε1 по высоте между заданным и фактическим полезным напором и разницы ε2 между заданной скоростью Nc вращения и фактической скоростью N вращения. На Фиг.2 показана функция преобразования для турбонасоса 20, обозначенная как К. Входным значением для функции K является контрольное значение Yc проходного сечения направляющих лопаток 206, а выходными значениями - скорость N вращения и полезный напор Hn.
Данная система регулирования обеспечивает стабилизацию как полезного напора Hn, так и синхронизацию скорости N вращения. Как указано выше, есть возможность воздействовать только на полезный напор Hn, но это не гарантирует, что значение стабилизированной скорости будет находиться в допустимом диапазоне, который в данном случае составляет +/-0,2% от заданной скорости Nc.
Этапы вычислений заявленного способа, которые выполняют для определения значений Hn_final, Y_fmal и Yc, так же, как этапы сравнения, которые выполняют для сравнения фактического полезного напора Hn и заданного полезного напора Hn_final и для сравнения фактической скорости N вращения и заданной скорости Nc вращения, осуществляют посредством электронного блока управления (не показан на чертежах), встроенного в установку 2 и запрограммированного на выполнение указанных задач. Указанный электронный блок управления может быть встроен в тот же регулятор.
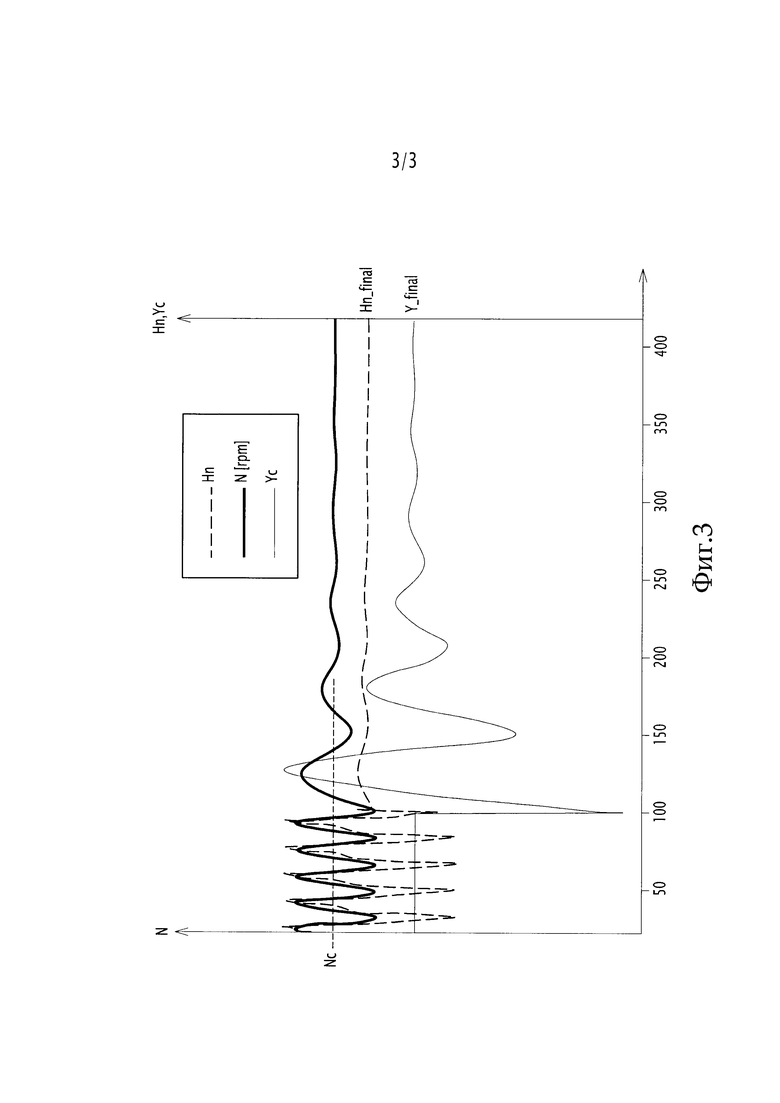
Фиг.3 изображает график, иллюстрирующий зависимость значений фактического полезного напора Hn, контрольного значения Yc проходного сечения направляющих лопаток 206 и скорости N вращения рабочего колеса 202 от времени. Для ясности на данном графике скорость N вращения показана толстой линией, полезный напор показан прерывистой линией, а контрольное значение Yc проходного сечения направляющих лопаток показано непрерывной линией.
Как видно на данном графике, контрольное значение Yc проходного сечения является постоянным при запуске и начинает изменяться на отметке 100 с после запуска, которая соответствует моменту начала регулирования полезного напора. До осуществления заявленного способа стабилизации значения скорости N вращения и полезного напора Hn колеблются даже при стабильном проходном сечении направляющих лопаток, что характерно для машины с S-характеристиками, например, для турбонасоса, работающего в режиме турбины, или для турбины Френсиса, предназначенной для работы при большом напоре.
В результате осуществления заявленного способа стабилизации после окончания периода времени от момента запуска до отметки приблизительно 350 со скорость N вращения рабочего колеса 202 и полезный напор Hn достигают, соответственно, заданной скорости Nc вращения и заданного полезного напора Hn_fmal.
Вышеописанные технические признаки различных вариантов выполнения и альтернативные варианты выполнения предлагаемого изобретения могут быть скомбинированы для получения новых вариантов выполнения предлагаемого изобретения.
Группа изобретений относится к способу стабилизации скорости вращения гидравлической машины, имеющей S-образную зависимость между крутящим моментом и скоростью вращения для обеспечения возможности подключения данной машины к электрической сети и установке, содержащей гидравлическую машину. Способ включает этапы, на которых рассчитывают заданный полезный напор (Hn_final) и заданное значение (Y_final) проходного сечения для изменения положения направляющих лопаток машины. Hn_final и Y_final рассчитывают для ситуации, когда крутящий момент, создаваемый потоком воды на рабочем колесе, равен нулю и машина вращается с заданной скоростью (Nc) для синхронизации машины с электрической сетью на основании частоты сети. Далее определяют фактический полезный напор (Hn), который действует в машине, сравнивают Hn_final с Hn и регулируют проходное сечение между направляющими лопатками для получения Y_final и уменьшения разницы (ε1) по высоте между Hn_final и Hn. Группа изобретений направлена на обеспечение стабилизации скорости вращения машины до ее подключения к сети. 2 н. и 8 з.п. ф-лы, 4 ил.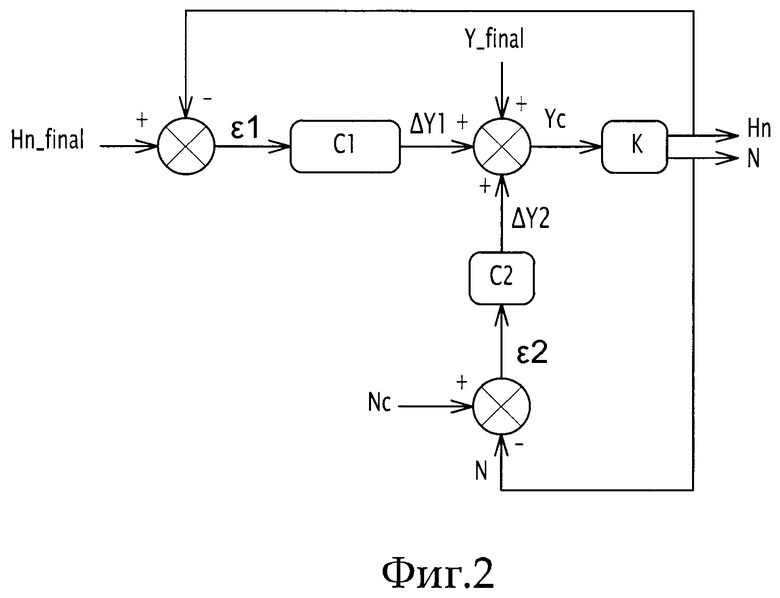
1. Способ стабилизации скорости (N) вращения гидравлической машины (20), имеющей S-образную зависимость между крутящим моментом и скоростью вращения для обеспечения возможности подключения данной машины к электрической сети, причем указанная гидравлическая машина содержит рабочее колесо (202) и распределитель, расположенный вокруг указанного рабочего колеса и содержащий подвижные направляющие лопатки (206),
отличающийся тем, что он включает этапы, на которых:
а) рассчитывают заданный полезный напор (Hn_final) и заданное значение (Y_final) проходного сечения для изменения положения направляющих лопаток (206) машины (20), причем заданный полезный напор и заданное значение проходного сечения рассчитывают для ситуации, когда крутящий момент, создаваемый потоком (F) воды на указанном рабочем колесе машины (20), равен нулю и указанная машина вращается с заданной скоростью (Nc) вращения для синхронизации машины с электрической сетью на основании частоты указанной сети,
b) определяют фактический полезный напор (Hn), который действует в указанной машине,
c) сравнивают заданный полезный напор с фактическим полезным напором, и
d) регулируют проходное сечение между направляющими лопатками (206) для получения заданного значения (Y_final) проходного сечения и уменьшения разницы (ε1) по высоте между заданным полезным напором и фактическим полезным напором.
2. Способ по п.1, отличающийся тем, что он дополнительно включает этапы, на которых:
e) измеряют фактическую скорость (N) вращения машины (20),
f) сравнивают фактическую скорость (N) вращения с заданной скоростью (Nc) вращения, при этом на этапе d) проходное сечение между направляющими лопатками (206) регулируют также для уменьшения разницы (ε2) между заданной скоростью (Nc) вращения и фактической скоростью (N) вращения.
3. Способ по п.2, отличающийся тем, что на этапе d) проходное сечение между направляющими лопатками (206) регулируют путем расчета контрольного значения (Yc) проходного сечения для изменения положения направляющих лопаток (206).
4. Способ по п.3, отличающийся тем, что контрольное значение (Yc) проходного сечения рассчитывают путем суммирования заданного значения (Y_final) проходного сечения с первым значением отклонения (ΔY1) проходного сечения, которое зависит от разницы (ε1) по высоте между заданным полезным напором (Hn_final) и фактическим полезным напором (Hn), и со вторым значением отклонения (ΔY2) проходного сечения, которое зависит от разницы (ε2) между заданной скоростью (Nc) вращения и фактической скоростью (N) вращения.
5. Способ по п.4, отличающийся тем, что первое значение отклонения (ΔY1) проходного сечения получают с помощью первого корректирующего модуля (C1), в котором в качестве входного значения принята разница (ε1) по высоте между заданным полезным напором (Hn_final) и фактическим полезным напором (Hn).
6. Способ по п.5, отличающийся тем, что первый корректирующий модуль (С1) представляет собой пропорциональный дифференциальный корректор.
7. Способ по любому из пп.4-6, отличающийся тем, что второе значение отклонения (ΔY2) проходного сечения получают с помощью второго корректирующего модуля (C2), в котором в качестве входного значения принята разница (ε2) между заданной скоростью (Nc) вращения и фактической скоростью (N) вращения.
8. Способ по п.7, отличающийся тем, что второй корректирующий модуль (С2) представляет собой пропорциональный интегральный дифференциальный корректор.
9. Установка для преобразования гидравлической энергии в электрическую энергию, содержащая гидравлическую машину (20), которая содержит рабочее колесо (202) и распределитель, расположенный вокруг указанного рабочего колеса и содержащий регулируемые направляющие лопатки (206) и средство для определения фактического полезного напора (Hn) указанной установки, отличающаяся тем, что она также содержит:
- средство для расчета заданного полезного напора (Hn_final) и заданного значения (Y_final) проходного сечения для изменения положения направляющих лопаток (206) машины (20), причем заданный полезный напор и заданное значение проходного сечения рассчитываются для ситуации, когда крутящий момент, создаваемый потоком (F) воды на рабочем колесе (202) машины (20), равен нулю и указанная машина вращается с заданной скоростью (Nc) вращения для синхронизации машины с электрической сетью на основании частоты указанной сети,
- средство для сравнения заданного полезного напора (Hn_final) с фактическим полезным напором (Hn), действующим в указанной машине, и
- средства для регулирования проходного сечения направляющих лопаток (206) для получения заданного значения (Y_final) проходного сечения и уменьшения разницы (ε1) по высоте между заданным полезным напором и фактическим полезным напором.
10. Установка по п.9, отличающаяся тем, что она также содержит:
- средство для расчета заданной скорости (Nc) вращения машины (20),
- средство для измерения фактической скорости (N) вращения указанной машины,
- средство для сравнения фактической скорости вращения с заданной скоростью вращения,
при этом указанные средства для регулирования проходного сечения направляющих лопаток (206) выполнены с возможностью уменьшения разницы (ε2) между заданной скоростью (Nc) вращения и фактической скоростью (N) вращения.
| US 4640664 A, 03.02.1987 | |||
| Оптический имитатор визуальной обстановки | 1984 |
|
SU1208572A1 |
| ИЗМЕЛЬЧАЮЩЕЕ УСТРОЙСТВО | 1993 |
|
RU2057585C1 |
| DE 19860617 C1, 05.10.2000 | |||
| Способ эксплуатации гидротурбины | 1989 |
|
SU1671948A1 |

