Изобретение относится к области инженерной геодезии и может быть использовано при геодезическом контроле с помощью электромагнитного излучения геометрии поверхности вращающихся промышленных агрегатов и их узлов (вращающихся обжиговых печей, мельниц, роликов и т.д.) в процессе функционирования, т.е. без остановки производства.
Известный способ определения осей вращающейся печи и несущих роликов [патент №92655, Украина, "Способ определения параметров поверхности вращающихся агрегатов", кл. G01B 9/00, опубл. 25.11.2010].
При технологии, предложенной в патенте и описанной в статье [Могильный С.Г., Шоломицкий А.А., Фролов И.С. "Новая технология определения геометрических и кинематических параметров вращающихся печей в процессе их эксплуатации" // Современные достижения геодезической науки и производства. Сб. научн. трудов. - Львов: Издательство национального университета „Львовская политехника". - 2011. Вып. 1 (21) - С. 125-130] измерения производятся электронным тахеометром в безотражательном режиме. Печь не останавливается и не охлаждается. Электронный тахеометр ориентируется относительно опорных точек, после чего выполняется комплекс измерений, который заключается в измерении горизонтального и вертикального угла и расстояния на точки, расположенные по характерным сечениям бандажей, обечайки и роликов печи. По этим данным вычисляются координаты точек, по которым впоследствии вычисляются геометрические параметры сечений. По совокупности сечений определяются геометрические параметры всей печи.
Наиболее близкий аналог способа позволяет определить только усредненные геометрические и кинематические характеристики печей, т.к. по этим измерениям невозможно разделить отклонения формы объекта от скачков его оси вращения во времени. При изменении скорости вращения агрегата во время измерений происходит искажение положения оси вращения в пространстве. У аналога предполагается, что скорость вращения агрегата является постоянной и выдерживается с высокой точностью. Кроме того, у аналога изобретения никак не учитывается перемещение всего агрегата вдоль оси вращения во время измерений, которое может составлять для различных печей от 20 до 200 мм в сутки.
Признак, совпадающий с существенным признаком заявляемого изобретения - измерения координат точек на поверхности вращающегося агрегата.
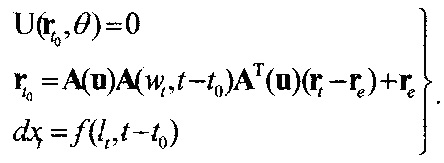
В основу изобретения поставлена задача усовершенствования способа определения параметров поверхности вращающихся агрегатов, в котором путем фиксации момента измерений, скорости вращения агрегата и смещения вдоль оси можно определить положение осей и отклонения параметров поверхности агрегата от проектных из системы уравнений:

где  - в общем виде уравнение поверхности вращающегося агрегата в некоторый начальный момент времени t0;
- в общем виде уравнение поверхности вращающегося агрегата в некоторый начальный момент времени t0;
 - вектор параметров поверхности;
- вектор параметров поверхности;
 - вектор координат точки пересечения луча визирования и поверхности агрегата в некоторый момент t текущего времени;
- вектор координат точки пересечения луча визирования и поверхности агрегата в некоторый момент t текущего времени;
 - вектор координат точки, расположенной на оси вращения;
- вектор координат точки, расположенной на оси вращения;
А(u) - матрица ортогонального поворота пространственных координат к оси вращения, определяемой единичным вектором u;
wt - угловая скорость вращения в момент времени t, об/сек;
A(wt, t-t0) - матрица ортогонального поворота пространственных координат вокруг оси вращения за период времени t-t0,
dxt - поправка в координату х для i-той точки в момент времени t-t0;
lt - расстояние до объекта, в текущий момент времени,
что позволяет получить технический результат - надежное и эффективное определение геометрических и кинематических параметров поверхности агрегата без непосредственного контакта исполнителя с агрегатом в процессе его функционирования.
Поставленная задача решается тем, что способ определения параметров поверхности вращающихся агрегатов, включающий измерение координат точек лазерным сканером на поверхности устройства, согласно изобретению, фиксируют время момента измерения, скорость вращения агрегата и смещение вдоль оси вращения и определяют отклонения параметров поверхности агрегата от проектных из системы уравнений:
где  - в общем виде уравнение поверхности вращающегося агрегата в некоторый начальный момент времени t0;
- в общем виде уравнение поверхности вращающегося агрегата в некоторый начальный момент времени t0;
- вектор параметров поверхности;
 - вектор координат точки пересечения луча визирования и поверхности агрегата в некоторый момент t текущего времени;
- вектор координат точки пересечения луча визирования и поверхности агрегата в некоторый момент t текущего времени;
 - вектор координат точки, расположенной на оси вращения;
- вектор координат точки, расположенной на оси вращения;
A(u) - матрица ортогонального поворота пространственных координат к оси вращения, определяемой единичным вектором u;
wt - угловая скорость вращения в момент времени t, об/сек;
A(wt, t-t0) - матрица ортогонального поворота пространственных координат вокруг оси вращения за период времени t-t0,
dxt - поправка в координату х для i-той точки в момент времени t-t0;
lt - расстояние до объекта, в текущий момент времени.
Задача может быть решена с помощью различного оборудования, использующего электромагнитное излучение для измерения расстояний: электронными тахеометрами, сканирующими тахеометрами и лазерными сканерами. Наиболее эффективно применять лазерные сканеры, т.к. они дают больший объем информации об объекте в короткое время (фиг. 2).
Лазерные сканеры позволяют выполнять измерения со скоростью 1000000 точек/сек при этом время измерения одного сечения составит 0,0005 сек, а число точек будет более чем в 100 раз больше, чем при измерении электронным тахеометром. Точность определения параметров сечения будет в 10 раз выше, чем при измерениях электронным тахеометром.
где ms≈mt - точность измерений расстояний лазерным сканером и электронным тахеометром; Ns и Nt - число измерений лазерным сканером и тахеометром, соответственно.
За один оборот вращающегося агрегата его форму и положение оси вращения можно будет определить от 100 до 1000 раз, в зависимости от периода вращения агрегата, что позволит очень точно определить траекторию оси вращения агрегата во времени.
Третьим преимуществом предлагаемого метода, является более точное определение формы объекта. При измерениях по методике ближайшего аналога измерения выполняют по сечениям (фиг. 1) и вычисляют параметры окружности в этом сечении, а затем переходят к более общему виду - уравнению цилиндра. При измерениях лазерным сканером (1, фиг. 1 и фиг. 2) можно получить точки измерений на поверхности объекта с заданным шагом, например, 2*2 мм, 5*5 мм или 10*10 мм (4 фиг. 2), что позволит не только определить общие параметры поверхности объекта, но и оценить локальные отклонения от этой поверхности, вызванные неравномерным износом элементов агрегата.
Решая совместно системы уравнений, составленные для достаточного числа измеренных на вращающейся поверхности точек, вычисляются как ее геометрические, так и кинематические параметры.
Указанные признаки составляют суть изобретения, потому как являются необходимыми и достаточными для достижения технического результата - точное, надежное и эффективное определение геометрических и кинематических параметров поверхности агрегата без непосредственного контакта исполнителя с агрегатом в процессе его функционирования.
Причинно-следственная связь признаков, составляющих суть изобретения и достигаемого технического результата, объясняются следующим.
Пример 1. Суть изобретения поясняется результатами измерений вращающейся печи №3 для обжига клинкера ООО «Топкинский цемент». На фиг. 1 показана схема секции такой установки и взаимное расположение измерительного прибора (1) и агрегата.
В процессе измерений на поверхности корпуса печи фиксировали координаты точек и момент их измерения. Лазерный сканер (1) обеспечивал автоматическую регистрацию измерений направления, расстояния до точек 1, 2, 3, 4…, по которым вычисляли их координаты и момент измерения достаточно большого числа точек, что позволяет применить предлагаемую технологию обработки результатов. Параллельно с этими измерениями фиксировалось время оборота печи с помощью светоотражательной пленки (3, фиг. 1) и лазерного датчика расстояний (2, фиг. 1).
Так как поверхность печи представляет круговой цилиндр, поэтому система уравнений будет иметь вид:

где  - вектор координат точки s, расположенной на линии ОО оси симметрии цилиндра;
- вектор координат точки s, расположенной на линии ОО оси симметрии цилиндра;
v - единичный вектор, направленный по оси цилиндра;
 - вектор координат точки е, расположенной на линии НН оси вращения печи;
- вектор координат точки е, расположенной на линии НН оси вращения печи;
R - радиус цилиндрической поверхности печи, м.
Совместное решение этих уравнений, составленных для всех измеренных точек, позволяет определить , v, R - геометрические параметры цилиндрической поверхности, а так же , u, w - кинематические параметры вращения печи.
В результате проведения производственного эксперимента было измерено 926358 точек на поверхности трех секций печи, образцы измерений приведены в таблице.
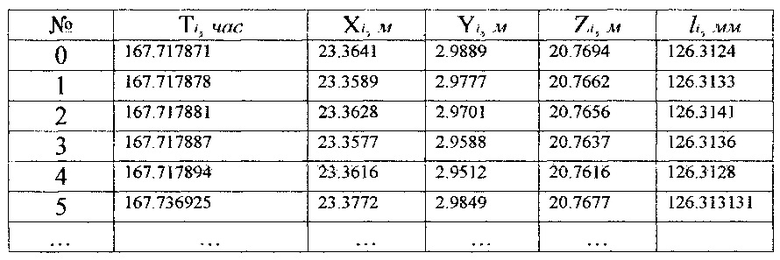
Для печи №3 обжига клинкера ООО «Топкинский цемент» величины этих параметров составили:
- отклонения оси печи в вертикальной плоскости не превышают 14 мм;
- отклонения оси печи в горизонтальной плоскости не превышают 18 мм;
- средний радиус печи R=2,523 м;
- отклонения от цилиндра составляют от 4 до 32 мм;
- отклонение геометрического центра от центра вращения составило от 0,2 до 1,4 мм для различных элементов;
- радиальное биение бандажей составило 0,4…1,2 мм;
- амплитуда аксиального биения бандажей и венцовой шестерни в диапазоне 1,3…2,9 мм;
- угловая скорость составляет 1 оборот за 58,2 сек.
Техническая эффективность от определения указанных параметров заключается в оценке прямолинейности оси вращения печи, что позволяет наметить и выполнить оптимальную корректуру взаимного расположения опорных роликов печи. Это позволяет добиться сокращения времени простоев и затрат энергии, а также повышения ресурса безаварийной работы и безопасности эксплуатации печи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ СКРЫТЫХ КОНТРОЛЬНЫХ ТОЧЕК ПРИ ИЗМЕРЕНИИ ОТКЛОНЕНИЙ ОТ КРУГОВОЙ ФОРМЫ СЕЧЕНИЙ КОРПУСОВ ЦИЛИНДРИЧЕСКИХ ВСТАВОК СУДОВ ИЛИ ПОДВОДНЫХ ЛОДОК | 2014 |
|
RU2575593C2 |
| Способ динамической юстировки систем координат вертолета на основе их векторного согласования | 2023 |
|
RU2795354C1 |
| СПОСОБ КОРРЕКТИРОВКИ ИЗМЕРЕНИЙ ПРИ ДЕТАЛЬНЫХ РАЗБИВОЧНЫХ РАБОТАХ НА ВЫСОКИХ МОНТАЖНЫХ ГОРИЗОНТАХ | 2004 |
|
RU2269095C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 2017 |
|
RU2652603C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ И ЦЕЛЕВОЙ ЗНАК ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ | 2000 |
|
RU2202101C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРНЫХ ЗАВИСИМОСТЕЙ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ, СМЕЩЕНИЙ НУЛЯ И МАТРИЦ ОРИЕНТАЦИИ ОСЕЙ ЧУВСТВИТЕЛЬНОСТИ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В СОСТАВЕ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА ПРИ СТЕНДОВЫХ ИСПЫТАНИЯХ | 2014 |
|
RU2566427C1 |
| Способ калибровки сканеров гравитационного поля | 2016 |
|
RU2663273C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ КОЛЕИ | 1995 |
|
RU2123445C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ С ИСПОЛЬЗОВАНИЕМ ПРИЕМНЫХ ОПОРНЫХ РЕПЕРНЫХ СТАНЦИЙ | 2018 |
|
RU2702098C1 |
| СПОСОБ ПОДПОВЕРХНОСТНОГО ЗОНДИРОВАНИЯ | 2009 |
|
RU2393501C1 |

Изобретение относится к области инженерной геодезии и может быть использовано при геодезическом контроле с помощью электромагнитного излучения геометрии поверхности вращающихся промышленных агрегатов и их узлов в процессе функционирования без остановки производства. Предложен способ определения параметров поверхности вращающихся агрегатов, включающий измерение координат точек лазерным сканером или электронным тахеометром на поверхности устройства, согласно изобретению, фиксируют время момента измерения, скорость вращения агрегата и смещение вдоль оси вращения и определяют положение осей и отклонения параметров поверхности агрегата от проектных из системы уравнений, учитывающей поправку в координату для конкретной точки в текущий момент времени и расстояние до объекта, в этот момент времени. Данное изобретение позволяет получить технический результат - надежное и эффективное определение геометрических и кинематических параметров поверхности агрегата без непосредственного контакта исполнителя с агрегатом в процессе его функционирования. 2 ил.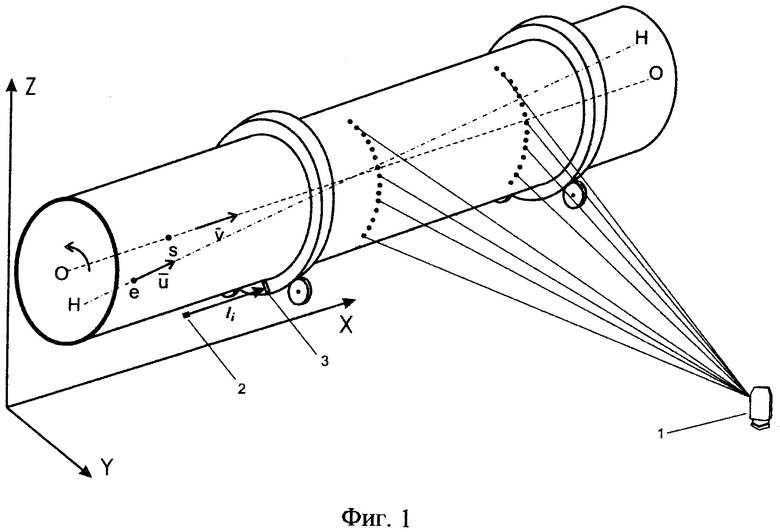
Способ высокоточного определения параметров поверхности и осей вращающихся агрегатов, включающий измерение координат точек электронным безотражательным тахеометром или лазерным сканером на поверхности устройства, отличающийся тем, что фиксируется момент измерений, скорость вращения агрегата и смещение вдоль оси, что позволяет с высокой точностью определить положение осей и отклонения параметров поверхности агрегата от проектных из системы уравнений:
где  - в общем виде уравнение поверхности вращающегося агрегата в некоторый начальный момент времени t0;
- в общем виде уравнение поверхности вращающегося агрегата в некоторый начальный момент времени t0;
 - вектор параметров поверхности;
- вектор параметров поверхности;
 - вектор координат точки пересечения луча визирования и поверхности агрегата в некоторый момент t текущего времени;
- вектор координат точки пересечения луча визирования и поверхности агрегата в некоторый момент t текущего времени;
 - вектор координат точки, расположенной на оси вращения;
- вектор координат точки, расположенной на оси вращения;
А(u) - матрица ортогонального поворота пространственных координат к оси вращения, определяемой единичным вектором u;
wt - угловая скорость вращения в момент времени t, об/сек;
A(wt, t-t0) - матрица ортогонального поворота пространственных координат вокруг оси вращения за период времени t-t0,
dxt - поправка в координату x для i-той точки в момент времени t-t0;
lt - расстояние до объекта, в текущий момент времени.
| Способ получения из Лао-ча зеленого кирпичного чая | 1950 |
|
SU92655A1 |
| МОГИЛЬНЫЙ С.Г., ШОЛОМИЦКИЙ А.А | |||
| и ФРОЛОВ И.С | |||
| "Геодезический мониторинг и выверка металлургического оборудования" // журнал "Интерэкспо Гео-Сибирь", 2013 г | |||
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКОЙ ФОРМЫ ТЕЛ ВРАЩЕНИЯ С ОТРАЖАЮЩЕЙ ПОВЕРХНОСТЬЮ | 1995 |
|
RU2109250C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ПРОФИЛЬНЫХ ОБЪЕКТОВ | 2013 |
|
RU2556310C2 |
| RU 2064161 C1, 20.07.1996 | |||
| СПОСОБ ИЗМЕРЕНИЯ ПОВЕРХНОСТЕЙ ВРАЩЕНИЯ НА КРУГЛОМЕРЕ | 2003 |
|
RU2243499C1 |
| CN 103335609 A, 02.10.2013 | |||
| КЛЮЧ ДЛЯ СВИНЧИВАНИЯ И РАЗВИНЧИВАНИЯ ЗАМКОВЫХ СОЕДИНЕНИЙ СКВАЖИННЫХ ТРУБ | 1994 |
|
RU2078901C1 |

