Данное изобретение относится к устройству и способу обработки рыбы.
Такие устройства и способы применяются при обработке морской рыбы, в частности, лосося. Такое устройство и такой способ известны, например, из международной публикации WO 2016/170550 А1. После убоя рыбу помещают в шнековый резервуар, который заполняют охлажденной морской водой. Для замедления наступления послеубойного окоченения рыбу охлаждают до определенной заданной температуры, используя шнековый резервуар. В то же время, ополаскивание рыбы морской водой в шнековом резервуаре способствует ее обескровливанию. В качестве средств для убоя рыбы используют одну или несколько машин, посредством которых рыбу сначала оглушают, а затем начинают обескровливание. Такие средства для убоя рыбы содержат соответствующие инструменты для убоя рыбы, которые представляют собой оглушающее средство и обескровливающий инструмент.
В таких шнековых резервуарах рыбу временно размещают по принципу FIFO. Таким образом, рыба, которую переместили в шнековый резервуар первой (первой пришла), также первой покинет шнековый резервуар после прохождения через него (первой вышла). Рыбу после ее прохождения через шнековый резервуар перемещают к одной или более расположенным ниже по потоку машинам для обработки рыбы для выполнения дальнейшей обработки. Машины для обработки рыбы представляют собой, например, машины для убоя, предназначенные для потрошения рыбы и последующей дальнейшей обработки.
Недостаток такого решения заключается в том, что размер и вес рыбы, которую перемещают из шнекового резервуара к машине для обработки рыбы, могут произвольным образом отклоняться от заданного значения. Таким образом, перед машинами для обработки рыбы стоит задача обработки рыб с большим диапазоном разных размеров и значений веса, что приводит к нескольким недостаткам. Таким образом, необходимо либо разделять рыбу на разные группы для обработки в соответствии с ее размером и/или весом перед дальнейшей обработкой в соответствующих машинах, либо предварительно настраивать машины для обработки рыбы на определенный размер рыбы. В результате при отклонении рыбы по размеру и весу выполнение оптимальной обработки рыбы посредством указанных машин возможно только для той рыбы, чей размер и/или вес находятся в пределах диапазона, на который настроена используемая машина для обработки рыбы.
Таким образом, цель данного изобретения заключается в создании устройства, обеспечивающего оптимальную обработку рыбы. Цель изобретения также заключается в обеспечении определенного состояния загрузки шнекового резервуара рыбой на основании соответствующих параметров рыбы.
Данная цель достигается благодаря указанному выше устройству, содержащему средство для убоя рыбы, предназначенное для оглушения и запуска процесса обескровливания рыбы, которое содержит средство для подсчета рыбы, выполненное с возможностью регистрации количества рыбы, и первое транспортировочное средство, выполненное с возможностью перемещения оглушенной рыбы к шнековому резервуару, причем транспортировочное средство содержит по меньшей мере одно первое измерительное средство для регистрации первого массового расхода оглушенной рыбы, при этом шнековый резервуар содержит приемный контейнер, выполненный с возможностью приема жидкости, в котором с возможностью вращения установлен винтовой транспортер, проходящий от первого конца ко второму концу, при этом винтовой транспортер вместе с внутренней стенкой приемного контейнера образует несколько рыбоприемных камер, причем винтовой транспортер выполнен с возможностью приведения во вращение посредством первого приводного блока для транспортирования рыбы, находящейся в рыбоприемных камерах, вместе с жидкостью в направлении второго конца приемного контейнера посредством винтового транспортера, при этом указанное устройство также содержит второе транспортировочное средство, расположенное у второго конца приемного контейнера и выполненное с возможностью перемещения рыбы к по меньшей мере одной машине для обработки рыбы, расположенной ниже по потоку от шнекового резервуара, и средство управления, с которым соединены по меньшей мере следующие компоненты: средство подсчета рыбы, первое измерительное средство и первый приводной блок, причем средство управления содержит вычислительный блок, выполненный с возможностью определения в каждом случае прогнозируемой переменной, связанной с количеством рыбы, для по меньшей мере одной из рыбоприемных камер на основании зарегистрированных значений количества рыб и первого массового расхода.
На основании прогнозируемых переменных, связанных с количеством рыбы, которые определяются с помощью средства управления и вычислительного блока, впервые оказалось возможным неожиданно просто получить расчетное значение, с помощью которого можно сделать выводы о содержании рыбы в рыбоприемных камерах. Таким образом, количество рыбы, находящейся в рыбоприемных камерах, может быть рассчитано без необходимости выполнения трудоемкого измерения каждой отдельной рыбы. Другими словами, вычислительный блок предназначен и выполнен с возможностью регистрации состояния загрузки шнекового резервуара.
Преимущество, достигаемое благодаря данному изобретению, заключается в том, что средство управления выполнено с возможностью определения на основании зарегистрированных значений первого массового расхода и количества рыбы соответствующей прогнозируемой переменной, которая представляет собой средний вес рыбы для каждой рыбоприемной камеры. Другими словами, в каждом случае одной рыбоприемной камере присваивают одну прогнозируемую переменную в виде среднего веса рыбы. Преимущество такого решения заключается в том, что средний вес рыбы в каждой из рыбоприемных камер определяют как расчетное значение. Преимущественно, таким образом можно эффективно определить значение веса отдельной рыбы без необходимости использования сложных измерительных средств, которые, например, регистрируют фактическое значение веса каждой отдельной рыбы. Предпочтительно каждое из средних значений веса рыбы определяют путем получения частного от зарегистрированных значений первого массового расхода и количества рыбы.
В соответствии с преимущественным вариантом выполнения данного изобретения средство управления содержит блок прогнозирования, в котором на основании значений среднего веса рыбы, определенных для каждой из рыбоприемных камер с помощью по меньшей мере одного заданного набора данных о распределении рыбы по размерам, обеспечена возможность определения прогнозируемых значений распределения рыбы по размерам в качестве дополнительных прогнозируемых переменных, которые в каждом случае дают информацию о соответствующем конкретном значении веса отдельной рыбы, находящейся в рыбоприемных камерах. Таким образом, путем использования блока прогнозирования обеспечена возможность вычислить соответствующие значения веса для отдельных рыб, находящихся в рыбоприемных камерах.
В блоке прогнозирования с помощью определенного значения среднего веса рыбы обеспечена возможность определения соответствующих значений веса отдельных рыб на основании набора данных о распределении рыбы по размерам. Набор данных о распределении рыбы по размерам содержит, например, информацию о распределении веса рыбы в соответствии с определенными видами рыб. Более предпочтительно, блок прогнозирования выполнен с возможностью доступа к нескольким наборам данных о распределении определенных видов рыб по размерам, в каждом из которых сохранены распределения по весу рыб с разным средним весом. Наборы данных о распределении рыб по размерам соответственно позволяют установить взаимосвязь между соответствующими значениями веса отдельных рыб и частотой их присутствия. Как вариант, блок прогнозирования выполнен с возможностью определения набора данных о распределении рыбы по размерам на основе алгоритма, например, путем вычисления соответствующего распределения вероятностей.
В соответствии с другим предпочтительным вариантом выполнения данного изобретения блок прогнозирования выполнен с возможностью определения расчетного значения общего веса для каждой из рыбоприемных камер, которое представляет собой общий вес всех рыб, находящихся в любой из рыбоприемных камер. Преимущество такого решения заключается в том, что может быть рассчитана общая масса рыб, находящихся в любой из рыбоприемных камер.
Преимущественное достижение данного изобретения заключается в том, что средство управления содержит блок прогнозирования объема, который предназначен и выполнен с возможностью определения на основании количества рыбы и первого массового расхода прогнозируемой переменной объема, которая представляет собой объем рыбы, перемещаемой за единицу времени в шнековый резервуар. Преимущественно, таким образом, с помощью блока прогнозирования объема определяют объем рыбы, перемещаемой в шнековый резервуар. Для этого в блоке прогнозирования объема обеспечен доступ, например, к по меньшей мере одному заданному набору данных о распределении рыбы по объему, с помощью которого объем рыбы может быть определен путем расчета.
В соответствии с преимущественной разработкой данного изобретения средство управления содержит первый блок управления, который выполнен с возможностью управления скоростью транспортирования, с которой рыбу, находящуюся в рыбоприемных камерах, транспортируют с помощью винтового транспортера, посредством приводного блока так, что объем рыбы, находящейся в соответствующих рыбоприемных камерах, не превышает заданный объем заполнения приемной камеры, путем сравнения заданного объема заполнения приемной камеры и прогнозируемой переменной объема. Преимущество такого решения заключается в том, что при заполнении рыбой обеспечено оптимальное использование объема, имеющегося в любой из приемных камер, при этом текучая среда оптимально обтекает рыбу для обеспечения ее охлаждения. Количество рыбы в любой из рыбоприемных камер предпочтительно соответствует по меньшей мере 50% и не превышает 60% от доступного для заполнения объема приемной камеры. Соблюдение такого соотношения текучей среды и рыбы гарантирует оптимальное направленное протекание текучей среды вокруг рыбы для обеспечения ее равномерного охлаждения, что гарантированно предотвращает возможность протекания текучей среды иным образом, над рыбой или мимо нее, без непосредственного контакта со всеми туловищами рыб.
Другими словами, блок управления предпочтительно выполнен с возможностью управления скоростью транспортирования, с которой рыбу транспортируют винтовым транспортером, посредством приводного блока так, чтобы объем рыбы, имеющейся в соответствующих рыбоприемных камерах, соответствовал по меньшей мере заданному минимальному объему.
Другой преимущественный вариант выполнения данного изобретения отличается тем, что устройство согласно данному изобретению содержит средство параметризации, которое предназначено и выполнено с возможностью предварительной настройки указанной по меньшей мере одной машины для обработки рыбы в соответствии с предварительно определенными данными параметризации, полученными на основе переменной прогнозирования, определяемой для каждой из рыбоприемных камер. Такое решение обеспечивает оптимальную настройку или параметризацию машины для обработки рыбы в соответствии с обрабатываемой рыбой.
Благодаря данному изобретению впервые стало возможным выполнить предварительную параметризацию машины для обработки рыбы. Таким образом, время нахождения рыбы в шнековом резервуаре может быть использовано для выполнения требуемой настройки на основании предварительно определенных данных параметризации. Поскольку соответствующую прогнозируемую переменную определяют для каждой из рыбоприемных камер, средство параметризации выполнено с возможностью обеспечения в каждом случае предварительной параметризации машины для обработки рыбы для различных партий рыбы, находящейся в соответствующих рыбоприемных камерах. Данные параметризации содержат соответствующие инструкции для настройки машины, которые используются средством параметризации в зависимости от типа определяемой в каждом случае прогнозируемой переменной, которая, к примеру, может представлять собой соответствующие значения веса отдельных рыб, значения объема отдельных рыб, соответствующее значение среднего веса рыбы, прогнозируемые значения распределения рыбы по размерам, расчетное значение общего веса и/или соответствующую прогнозируемую переменную объема, для параметризации машины (машин) для обработки рыбы.
Другое преимущество заключается в том, что на основании определенной прогнозируемой переменной можно предварительно рассчитать объем производства и, таким образом, оптимизировать весь производственный процесс. Например, на основании прогнозируемой переменной можно смоделировать объем производства и путем моделирования заранее определить ожидаемую итоговую производительность. Например, если моделирование производственного процесса показывает, что для того, чтобы полностью обеспечить предполагаемый объем производства, потребуется большее количество исходного материала, это можно определить заранее и, при необходимости, реорганизовать процесс до начала фактического производственного процесса.
В соответствии с преимущественной разработкой данного изобретения второе транспортировочное средство содержит второе измерительное средство, выполненное с возможностью регистрации второго массового расхода рыбы, перемещаемой из шнекового резервуара к указанной по меньшей мере одной машине для обработки рыбы, расположенной ниже по потоку. Второе измерительное средство предпочтительно выполнено в виде ленточных весов или расходомера. Таким образом, обеспечивается регистрация массового расхода рыбы, покидающей шнековый резервуар. Второе измерительное средство также соединено со средством управления или вычислительным блоком для передачи данных о зарегистрированном значении массового расхода. Такое соединение обеспечено, например, посредством соответствующей электрической или оптоэлектронной системы шин данных.
Предпочтительный вариант выполнения данного изобретения отличается тем, что средство управления содержит второй блок управления, который выполнен с возможностью управления скоростью транспортирования второго транспортировочного средства так, чтобы второй массовый расход соответствовал по меньшей мере по существу производительности указанной по меньшей мере одной машины, путем сравнения зарегистрированного значения второго массового расхода с определенной производительностью указанной по меньшей мере одной машины для обработки рыбы.
Преимущество такого решения заключается в том, что подача рыбы в машину для обработки рыбы обеспечена с по существу постоянным массовым расходом. Другими словами, рыбу, покидающую шнековый резервуар, подают посредством второго транспортировочного средства в машину для обработки рыбы так, чтобы указанная машина обрабатывала то количество подаваемой рыбы, которое соответствует ее производительности.
Кроме того, предпочтительно, средство управления выполнено с возможностью использования первого приводного блока для уменьшения скорости транспортирования, с которой рыбу, находящуюся в рыбоприемных камерах, транспортируют винтовым транспортером, при условии, что зарегистрированное значение второго массового расхода меньше, чем количество рыбы, распределенное в шнековом резервуаре. В соответствии с другим преимущественным вариантом выполнения устройство согласно данному изобретению содержит распределительное средство, выполненное с возможностью загрузки рыбоприемных камер рыбой, при этом распределительное средство содержит распределительное
транспортировочное средство для перемещения рыбы из первого транспортировочного средства и направляющий элемент, выполненный с возможностью перемещения вдоль винтового транспортера между первым концом и вторым концом для обеспечения перемещения рыбы в одну из рыбоприемных камер.
Преимущество распределительного средства заключается в том, что, в частности, на этапе запуска шнекового резервуара отдельные рыбоприемные камеры выполнены с возможностью управляемой загрузки рыбой. Таким образом, обеспечена возможность, например, при загрузке шнекового резервуара, который еще не заполнен рыбой, в первую очередь загрузить рыбой рыбоприемные камеры, которые ближе всего расположены ко второму концу. Для этого направляющий элемент постепенно перемещают, начиная от второго конца в направлении первого конца приемного контейнера с помощью средства управления так, что происходит последовательное постепенное заполнение приемных камер. В этом случае рыбоприемные камеры могут быть загружены рыбой на начальном этапе по возможности за самое короткое время. Другое преимущество заключается в том, что распределительное транспортировочное средство выполнено с возможностью равномерной загрузки рыбы в отдельные рыбоприемные камеры в динамическом режиме.
Кроме того, данная цель достигается благодаря соответствующему способу, включающему вышеуказанные признаки. Предложенный способ включает следующие этапы: оглушение и начало обескровливания рыбы с помощью средства для убоя рыбы, регистрацию количества рыбы с помощью средства подсчета, перемещение оглушенной рыбы в шнековый резервуар с помощью первого транспортировочного средства, регистрацию первого массового расхода оглушенной рыбы во время перемещения с помощью первого измерительного средства, причем шнековый резервуар содержит приемный контейнер, который выполнен с возможностью приема жидкости и в котором с возможностью вращения установлен винтовой транспортер, проходящий от первого конца ко второму концу, при этом винтовой транспортер вместе с внутренней стенкой приемного контейнера образует несколько рыбоприемных камер, причем винтовой транспортер выполнен с возможностью приведения во вращение посредством первого приводного блока для транспортирования рыбы, находящейся в рыбоприемных камерах, вместе с жидкостью в направлении второго конца приемного контейнера посредством винтового транспортера; при этом способ также включает перемещение рыбы к по меньшей мере одной машине для обработки рыбы, расположенной ниже по потоку от винтового транспортера, с помощью второго транспортировочного средства, расположенного у второго конца приемного контейнера, и определение прогнозируемой переменной, связанной с количеством рыбы, для по меньшей мере одной из рыбоприемных камер на основании количества рыбы и зарегистрированного значения первого массового расхода с помощью вычислительного блока средства управления, к которому присоединены по меньшей мере следующие компоненты: средство подсчета рыбы, первое измерительное средство и первый приводной блок, причем средство управления содержит вычислительный блок.
В соответствии с преимущественным вариантом выполнения способа согласно данному изобретению предусмотрено, что в качестве соответствующей прогнозируемой переменной определяют средний вес рыбы для каждой рыбоприемной камеры на основании зарегистрированных значений первого массового расхода и количества рыбы.
В соответствии с предпочтительным вариантом выполнения прогнозируемые значения распределения рыбы по размерам, которые дают информацию о соответствующих значениях веса отдельных рыб, находящихся в рыбоприемных камерах, определяют посредством блока прогнозирования в качестве дополнительных прогнозируемых переменных на основании среднего веса рыбы, определенного с помощью по меньшей мере одного заданного набора данных о распределении рыбы по размерам, для каждой из рыбоприемных камер.
В соответствии с другим предпочтительным вариантом выполнения изобретения данный способ отличается тем, что определяют расчетные значения общего веса для каждой из рыбоприемных камер посредством блока прогнозирования, причем расчетные значения общего веса представляют собой общий вес всех рыб, находящихся в любой из рыбоприемных камер.
Преимущественный вариант выполнения данного изобретения отличается тем, что на основании количества рыбы и первого массового расхода определяют прогнозируемую переменную объема, причем прогнозируемая переменная объема представляет собой объем рыбы, перемещаемой в шнековый резервуар за единицу времени.
В соответствии с другим предпочтительным вариантом выполнения регулируют скорость транспортирования, с которой рыбу, находящуюся в рыбоприемных камерах, транспортируют винтовым транспортером. Скорость транспортирования регулируют посредством первого блока управления путем сравнения заданного объема заполнения рыбоприемной камеры и прогнозируемой переменной объема, причем работу приводного блока осуществляют таким образом, чтобы объем рыбы, находящейся в соответствующих рыбоприемных камерах, не превышал заданный объем заполнения приемной камеры.
Другой преимущественный вариант выполнения данного изобретения отличается тем, что выполняют предварительную настройку указанной по меньшей мере одной машины для обработки рыбы в соответствии с предварительно определенными данными параметризации на основании прогнозируемой переменной, определенной для каждой из рыбоприемных камер.
В соответствии с другим предпочтительным вариантом выполнения данного изобретения регистрируют второй массовый расход рыбы, перемещаемой вторым транспортировочным средством из шнекового резервуара к указанной по меньшей мере одной машине для обработки рыбы, расположенной ниже по потоку. Преимущественно, для этого используют второе измерительное средство.
В соответствии с другим предпочтительным вариантом выполнения данного изобретения регулируют скорость транспортирования второго транспортировочного средства путем сравнения зарегистрированного значения второго массового расхода с заданной производительностью указанной по меньшей мере одной машины для обработки рыбы так, чтобы второй массовый расход соответствовал по меньшей мере по существу производительности указанной по меньшей мере одной машины.
Другой преимущественный вариант выполнения данного изобретения отличается тем, что произвольно загружают одну из рыбоприемных камер с помощью распределяющего средства, при этом рыбу перемещают с первого транспортировочного средства на распределительное транспортировочное средство и переносят в одну из рыбоприемных камер с помощью направляющего элемента, выполненного с возможностью перемещения вдоль винтового транспортера между первым концом и вторым концом.
Чтобы избежать повторения, ссылка делается на предшествующее описание предложенного устройства с учетом преимуществ, связанных с предложенным способом, а также с учетом альтернативных вариантов выполнения. Приведенные утверждения также относятся к предложенному способу.
Дополнительные предпочтительные и/или преимущественные признаки и варианты выполнения данного изобретения описаны в зависимых пунктах формулы изобретения и в описании. В частности, предпочтительные варианты выполнения более подробно описаны со ссылкой на прилагаемый чертеж.
На чертеже:
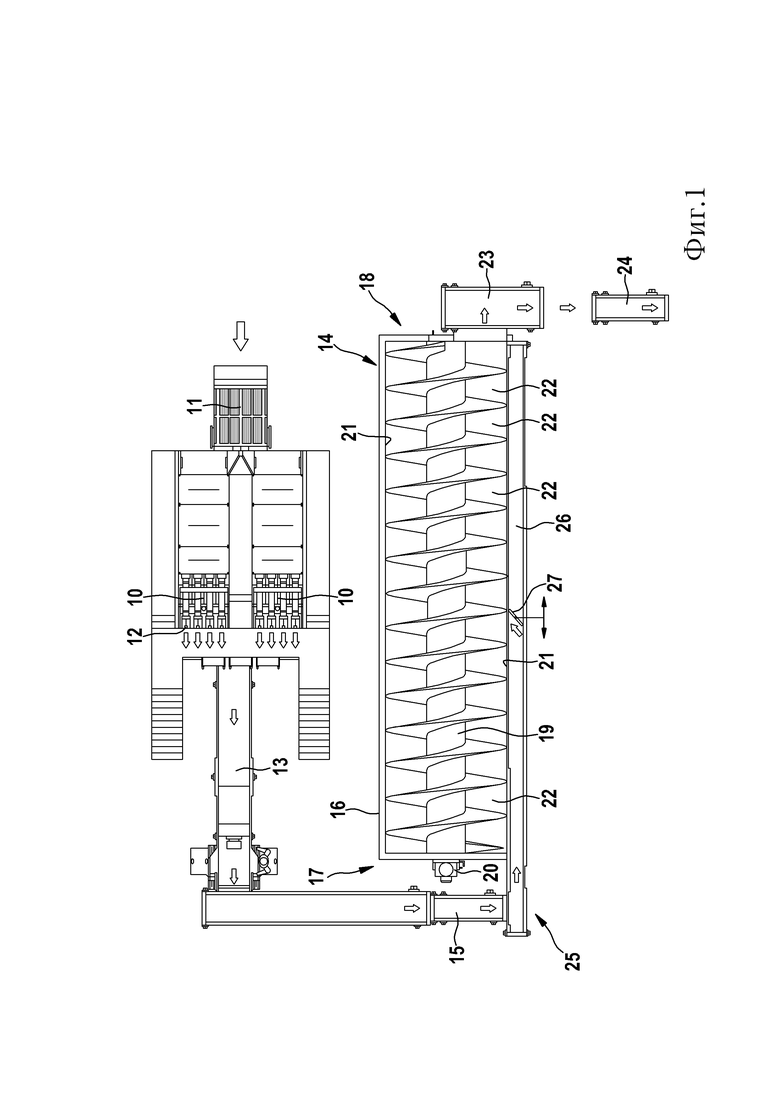
Фиг. 1 схематично изображает вид сверху устройства для обработки рыбы согласно данному изобретению.
Предложенное устройство, предназначенное для обработки рыбы, и предложенный способ более подробно описаны далее со ссылками на Фиг. 1. Предложенное устройство содержит средство 10 для убоя рыбы, предназначенное для оглушения рыбы, которую транспортируют к указанному средству с помощью средства 11 для подачи рыбы, и для начала ее обескровливания. Для этого средство 10 для убоя рыбы содержит соответствующие инструменты, не показанные на Фиг. 1, в частности, в каждом случае первый инструмент для убоя рыбы, который выполнен в виде оглушающего средства, и второй инструмент для убоя рыбы, который используют в качестве обескровливающего инструмента для разрезания магистральной артерии. Как проиллюстрировано в качестве примера на Фиг. 1, оба средства для убоя рыбы работают параллельно. Количество средств для убоя рыбы выбирают произвольным образом.
Указанное устройство также содержит средство 12 для подсчета рыбы, выполненное с возможностью регистрации количества рыбы. Таким образом, количество животных, обрабатываемых с помощью средства 10 для убоя рыбы, регистрируется и отслеживается, чтобы количество оглушенной рыбы, обеспечиваемое средством 10, было предоставлено в качестве входной переменной средству управления, которое будет подробно описано далее. Первое транспортировочное средство 13 выполнено с возможностью перемещения оглушенной рыбы к шнековому резервуару 14. Первое транспортировочное средство 13, к примеру, выполнено в виде бесконечного ленточного транспортера. Первое транспортировочное средство 13 содержит по меньшей мере одно первое измерительное средство 15, которое выполнено с возможностью регистрации массового расхода оглушенной рыбы. Измерительное средство 15 предпочтительно выполнено в виде ленточных весов или поточных весов, соответственно. Таким образом, вес оглушенной рыбы, транспортируемой за единицу времени, непрерывно регистрируется первым измерительным средством 15.
Шнековый резервуар 14 предназначен для приема оглушенной рыбы с обеспечением полного обескровливания рыбы в резервуаре 14 и доведения температуры рыбы до определенной заданной температуры. Для этого шнековый резервуар 14 содержит приемный контейнер 16, выполненный с возможностью приема жидкости. Приемный контейнер 16 предпочтительно заполнен морской водой, температуру которой поддерживают на уровне определенной заданной температуры с помощью охлаждающих блоков, которые не показаны на чертеже.
В приемном контейнере 16 от первого конца 17 до второго конца 18 проходит винтовой транспортер 19. Винтовой транспортер 19 предпочтительно выполнен в виде Архимедова винта. Кроме того, винтовой транспортер 19 установлен с возможностью вращения в приемном контейнере 16 и выполнен с возможностью приведения во вращение посредством первого приводного блока 20. Винтовой транспортер 19 вместе с внутренней стенкой 21 контейнера 16 образует большое количество рыбоприемных камер 22. Таким образом, винтовой транспортер 19 выполнен с возможностью транспортировки рыбы, находящейся в камерах 22, вместе с жидкостью в направлении второго конца 18 контейнера 16.
Второе транспортировочное средство 23 расположено у второго конца 18 приемного контейнера 16. Второе транспортировочное средство 23 выполнено с возможностью транспортировки рыбы к по меньшей мере одной машине для обработки рыбы, не показанной на чертеже, которая расположена ниже по потоку от шнекового резервуара 14. Указанная по меньшей мере одна машина для обработки рыбы представляет собой, например, машину для убоя и/или потрошения рыбы.
Со средством управления, которое не показано на чертеже, соединены по меньшей мере следующие компоненты: средство 12 для подсчета рыбы, первое измерительное средство 15 и первый приводной блок 20. Указанные компоненты предпочтительно соединены посредством электрического или оптоэлектронного соединения с помощью соответствующих систем шин данных.
Средство управления содержит вычислительный блок, выполненный с возможностью определения для по меньшей мере одной из рыбоприемных камер 22 прогнозируемой переменной, связанной с количеством рыбы, на основании зарегистрированных значений количества рыбы и первого массового расхода. Определяемая прогнозируемая переменная представляет собой расчетное значение, которое дает информацию об уровне заполнения каждой из рыбоприемных камер 22. Другими словами, с помощью указанной прогнозируемой переменной обеспечена возможность с высокой точностью вычислить степень заполнения шнекового резервуара рыбой, в частности для каждой отдельной рыбоприемной камеры 22.
Преимущественно средство управления выполнено с возможностью определения в качестве соответствующей прогнозируемой переменной среднего веса рыбы для каждой из рыбоприемных камер 22. Для этого средство управления выполнено, к примеру, так, что средний вес рыбы для каждой из рыбоприемных камер 22 определяют путем получения частного. Предпочтительно с помощью средства управления, используя зарегистрированное значение первого массового расхода, в каждом случае для каждой из рыбоприемных камер 22 определяют общий вес находящихся в ней рыб. Средство управления также выполнено с возможностью определения среднего веса рыб для каждой из рыбоприемных камер 22 в виде прогнозируемой переменной путем получения частного от значения общего веса, определяемого в каждом случае, и количества рыбы, находящейся в каждой из рыбоприемных камер. Для этого средство управления выполнено с возможностью определения количества рыбы, находящейся в любой из рыбоприемных камер 22, на основании зарегистрированного значения количества рыбы и проектной скорости транспортирования винтового транспортера, обеспечиваемой первым приводным блоком 20.
Преимущественно средство управления содержит блок прогнозирования, который выполнен с возможностью определения прогнозируемых значений распределения рыбы по размерам в качестве дополнительных прогнозируемых переменных, которые дают информацию о соответствующем весе отдельных рыб, находящихся в рыбоприемных камерах 22, на основании значений среднего веса рыбы, определенных с помощью по меньшей мере одного заданного набора данных о распределении рыбы по размерам, для каждой из рыбоприемных камер 22. Другими словами, блок прогнозирования выполнен с возможностью определения расчетных значений, которые дают информацию о распределении веса рыбы, находящейся в любой из рыбоприемных камер 22.
Для этого предполагаемые значения веса отдельных рыб конкретных видов сохранены в средстве управления в виде заданного набора данных о распределении рыбы по размерам. Посредством блока прогнозирования, который выполнен, в частности, в виде блока прогнозирования веса, предназначенного для определения значений веса отдельных рыб путем расчета, вес отдельной рыбы в каждом случае определяют с учетом данных о распределении рыбы по размерам из указанного заданного набора. Блок прогнозирования предпочтительно содержит набор данных о распределении рыбы по размерам для каждого вида рыбы. Кроме того, в блоке прогнозирования средства управления обеспечена возможность хранения нескольких наборов данных о распределении рыбы по размерам с различными значениями среднего веса рыбы. В качестве альтернативы, набор или наборы данных о распределении рыбы по размерам получают с помощью алгоритма. Наборы данных о распределении рыбы по размерам предпочтительно содержат дополнительные характеристики, такие как происхождение рыбы из различных мест добычи. Таким образом, например, информация о происхождении рыбы из определенной рыбной фермы или о расположении сетей включена в указанные наборы данных в качестве выходного значения.
Преимущественно, блок прогнозирования выполнен с возможностью определения в каждом случае расчетного значения общего веса для каждой из рыбоприемных камер 22. В каждом случае расчетное значение общего веса представляет собой общий вес всех рыб, находящихся в одной из рыбоприемных камер 22.
Кроме того, предпочтительно, средство управления содержит блок прогнозирования объема. Блок прогнозирования объема предназначен и выполнен с возможностью определения прогнозируемой переменной объема, которая представляет собой объем рыбы, перемещаемой к шнековому резервуару 14 за единицу времени, на основании количества рыбы и первого массового расхода. Блок прогнозирования объема преимущественно содержит набор данных о распределении рыбы по объему, на основании которого устанавливают зависимость между соответствующей прогнозируемой переменной, связанной с количеством рыбы, и предполагаемым объемом рыбы.
Средство управления также содержит первый блок управления, предназначенный для управления и регулирования скоростью транспортирования винтового транспортера 19. Блок управления выполнен с возможностью управления скоростью транспортирования посредством первого приводного блока 20 путем сравнения определенного объема заполнения приемной камеры и прогнозируемой переменной объема так, чтобы объем рыбы, находящейся в соответствующих камерах 22, не превышал заданный объем заполнения приемной камеры. Другими словами, посредством блока управления обеспечено автоматическое регулирование скорости транспортирования, с которой рыба, находящаяся в камерах 22, транспортируется винтовым транспортером 19, для обеспечения по возможности полного заполнения соответствующих камер 22.
Блок управления, в частности, выполнен с возможностью регулирования соотношения объемных долей рыбы и текучей среды в диапазоне от 50:50 до 60:40. Преимущество поддержания объемного соотношения в таком диапазоне заключается в том, что текучая среда протекает вокруг рыбы равномерно и в полном объеме с обеспечением контакта текучей среды с каждой рыбой. В таком случае для всех рыб обеспечена одинаковая температура.
Преимущественно обеспечено средство параметризации, которое предназначено и выполнено с возможностью предварительной настройки указанной по меньшей мере одной машины для обработки рыбы в соответствии с предварительно заданными данными параметризации на основании прогнозируемой переменной, определяемой для каждой рыбоприемной камеры. Таким образом, обеспечена возможность выполнить предварительную оптимальную настройку машины для обработки рыбы, расположенной ниже по потоку от шнекового резервуара 14 с соответствующим запасом времени до предполагаемого поступления рыбы.
Второе транспортировочное средство 23 предпочтительно содержит второе измерительное средство 24. Таким образом, второе транспортировочное средство 23 выполнено с возможностью регистрации посредством второго измерительного средства 24 второго массового расхода рыбы, перемещаемой шнековым резервуаром к указанной по меньшей мере одной машине для обработки рыбы, расположенной ниже по потоку.
Средство управления также содержит второй блок управления. Во втором блоке управления обеспечена возможность управления скоростью транспортирования второго транспортировочного средства 23 путем сравнения зарегистрированного значения второго массового расхода с заданной производительностью указанной по меньшей мере одной машины для обработки рыбы так, чтобы значение второго массового расхода соответствовало по меньшей мере по существу производительности указанной по меньшей мере одной машины для обработки рыбы. Другими словами, второй блок управления предназначен, с одной стороны, для поддержания массового расхода рыбы, выходящей из шнекового резервуара 14 в направлении указанной по меньшей мере одной машины для обработки рыбы, по возможности постоянным, а, с другой стороны, для регулирования количества рыбы, перемещаемой за единицу времени к указанной по меньшей мере одной машине для обработки рыбы в соответствии с ее производительностью, т.е. пропускной способностью указанной по меньшей мере одной машины. Для этого второй массовый расход преимущественно устанавливают посредством второго блока управления так, чтобы указанный массовый расход соответствовал производительности указанной по меньшей мере одной машины для обработки рыбы.
Предложенное устройство преимущественно содержит распределительное средство 25, которое предназначено и выполнено с возможностью обеспечения произвольной загрузки одной из рыбоприемных камер 22. Для этого распределительное средство 25 содержит распределительное транспортировочное средство 26, которое предназначено для обеспечения перемещения рыбы с первого транспортировочного средства 13.
Распределительное средство 25 также содержит направляющий элемент 27. Направляющий элемент 27 выполнен с возможностью перемещения между первым концом 17 и вторым концом 18 шнекового резервуара 14 и обеспечения перемещения рыбы в одну из рыбоприемных камер 22. Распределительное средство 25 предпочтительно соединено со средством управления так, что с помощью средства управления обеспечена возможность распределения рыбы в отдельные рыбоприемные камеры 22.
Распределительное средство 25 предпочтительно используют при запуске предложенного устройства для заполнения камер рыбой по возможности равномерно перед приведением винтового транспортера 19 во вращение. Для этого направляющий элемент 27 сначала перемещают ко второму концу 18 шнекового резервуара 14 так, что те камеры 22, которые расположены вблизи второго конца 18, заполняются рыбой первыми. С помощью средства управления направляющий элемент 27 постепенно перемещают в направлении первого конца 17 так, что, начиная от второго конца, отдельные рыбоприемные камеры 22 постепенно заполняются рыбой в направлении первого конца 17. Когда все камеры 22 заполнены, с помощью средства управления обеспечивают приведение во вращение винтового транспортера 19 посредством первого приводного блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство и способ оглушения птицы в надземной камере оглушения | 2021 |
|
RU2837754C2 |
| СПОСОБ ОГЛУШЕНИЯ И/ ИЛИ УБОЯ ЖИВОТНЫХ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2710170C2 |
| Устройство, установка и способ оглушения птицы | 2015 |
|
RU2695882C1 |
| УСТРОЙСТВО ПОСТОЯННОГО/ПЕРЕМЕННОГО ТОКА И СПОСОБ ОГЛУШЕНИЯ И ОБЕЗДВИЖИВАНИЯ ДОМАШНЕЙ ПТИЦЫ | 2016 |
|
RU2722035C2 |
| УСТРОЙСТВО ДЛЯ УБОРКИ СЕЛЬСКОХОЗЯЙСТВЕННОЙ КУЛЬТУРЫ (ВАРИАНТЫ) | 2019 |
|
RU2784488C2 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ ЭФФЕКТИВНОСТИ АНЕСТЕЗИИ ЖИВОТНОГО, ПОДЛЕЖАЩЕГО УБОЮ | 2015 |
|
RU2683227C2 |
| УСТРОЙСТВО ДОСТАВКИ АЭРОЗОЛЯ, СОДЕРЖАЩЕЕ ИСКУССТВЕННЫЙ ИНТЕЛЛЕКТ | 2020 |
|
RU2835827C2 |
| СИСТЕМА ОБРАБОТКИ УЛОВА | 2018 |
|
RU2768323C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СОРТИРОВКИ КРИСТАЛЛОВ | 2016 |
|
RU2629740C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОИЗВОДСТВЕННЫМ ПРОЦЕССОМ | 2012 |
|
RU2580394C1 |
Устройство включает средство для убоя рыбы, средство подсчета рыбы и первое транспортировочное средство для перемещения оглушенной рыбы к шнековому резервуару. Первое транспортировочное средство содержит по меньшей мере одно первое измерительное средство, выполненное с возможностью регистрации первого массового расхода оглушенной рыбы. Шнековый резервуар содержит приемный контейнер, выполненный с возможностью приема жидкости, и винтовой транспортер, который вместе с приемным контейнером образует рыбоприемные камеры для обеспечения транспортирования рыбы, находящейся в указанных камерах, через указанную жидкость. Устройство также содержит второе транспортировочное средство, расположенное у второго конца приемного контейнера и выполненное с возможностью перемещения рыбы к по меньшей мере одной машине для обработки рыбы, расположенной ниже по потоку от шнекового резервуара, и средство управления, содержащее вычислительный блок, выполненный с возможностью определения в каждом случае прогнозируемой переменной, связанной с количеством рыбы, для по меньшей мере одной из рыбоприемных камер на основании зарегистрированных значений количества рыбы и первого массового расхода. Данное изобретение также относится к способу обработки рыбы. Изобретение обеспечивает оптимальную обработку рыбы. 2 н. и 18 з.п. ф-лы, 1 ил.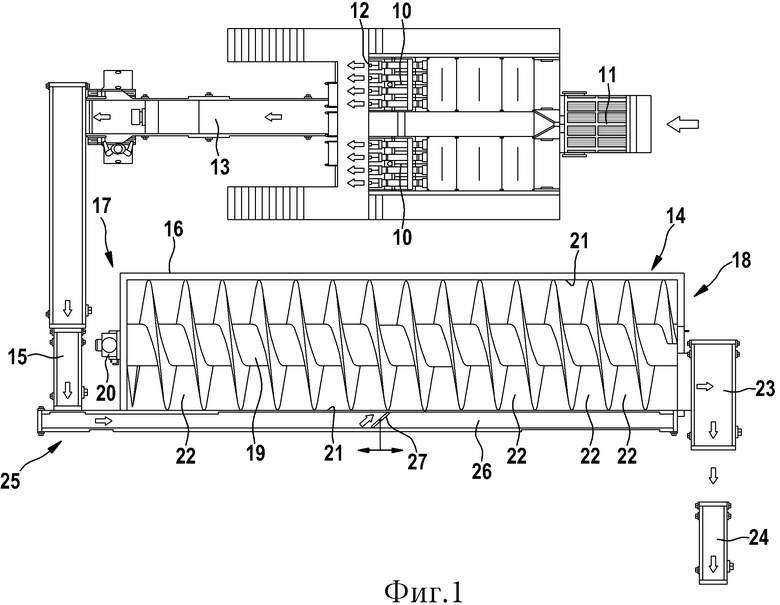
1. Устройство для обработки рыбы, содержащее
средство (10) для убоя рыбы, выполненное с возможностью оглушения и начала обескровливания рыбы и содержащее средство (12) для подсчета рыбы, выполненное с возможностью регистрации количества рыбы,
первое транспортировочное средство (13), выполненное с возможностью перемещения оглушенной рыбы к шнековому резервуару (14), причем первое транспортировочное средство (13) содержит по меньшей мере одно первое измерительное средство (15), выполненное с возможностью регистрации первого массового расхода оглушенной рыбы, а шнековый резервуар (14) содержит приемный контейнер (16), который выполнен с возможностью приема жидкости и в котором с возможностью вращения расположен винтовой транспортер (19), проходящий от первого конца ко второму концу, при этом винтовой транспортер (19) вместе с внутренней стенкой (21) приемного контейнера (16) образует рыбоприемные камеры (22), причем винтовой транспортер (19) выполнен с возможностью приведения во вращение посредством первого приводного блока (20) для транспортирования рыбы, находящейся в рыбоприемных камерах (22), через указанную жидкость в направлении второго конца (18) приемного контейнера (16) посредством винтового транспортера (19),
второе транспортировочное средство (23), расположенное у второго конца (18) приемного контейнера (16) и выполненное с возможностью перемещения рыбы к по меньшей мере одной машине для обработки рыбы, расположенной ниже по потоку от шнекового резервуара (14), и
средство управления, с которым соединены по меньшей мере следующие компоненты: средство (12) для подсчета рыбы, первое измерительное средство (15) и первый приводной блок (20), причем средство управления содержит вычислительный блок, выполненный с возможностью определения прогнозируемой переменной, связанной с количеством рыбы, для по меньшей мере одной из рыбоприемных камер (22) на основании зарегистрированных значений количества рыбы и первого массового расхода.
2. Устройство по п. 1, отличающееся тем, что средство управления выполнено с возможностью определения, в качестве соответствующей прогнозируемой переменной, среднего значения веса рыбы для каждой рыбоприемной камеры (22) на основании зарегистрированных значений первого массового расхода и количества рыбы.
3. Устройство по п. 2, отличающееся тем, что средство управления содержит блок прогнозирования, который выполнен с возможностью определения прогнозируемых значений распределения рыбы по размерам на основании средних значений веса рыб, полученных с помощью по меньшей мере одного заданного набора данных о распределении рыбы по размерам для каждой из рыбоприемных камер (22), в качестве дополнительных прогнозируемых переменных, которые дают информацию о соответствующих значениях веса отдельных рыб, находящихся в рыбоприемных камерах.
4. Устройство по п. 2 или 3, отличающееся тем, что блок прогнозирования выполнен с возможностью определения расчетного значения общего веса для каждой из рыбоприемных камер (22), которое представляет собой общий вес всех рыб, находящихся в любой из рыбоприемных камер (22).
5. Устройство по любому из пп. 1-4, отличающееся тем, что средство управления содержит блок прогнозирования объема, который выполнен с возможностью определения прогнозируемой переменной объема, которая представляет собой объем рыбы, перемещаемой к шнековому резервуару за единицу времени, на основании количества рыбы и первого массового расхода.
6. Устройство по п. 5, отличающееся тем, что средство управления содержит первый блок управления, который выполнен с возможностью управления скоростью транспортирования, с которой рыба, находящаяся в рыбоприемных камерах (22), транспортируется винтовым транспортером (19), посредством первого приводного блока (20) путем сравнения заданного объема заполнения приемных камер и прогнозируемой переменной объема, так, чтобы объем рыбы, находящейся в соответствующих рыбоприемных камерах (22), не превышал заданный объем заполнения приемных камер.
7. Устройство по любому из пп. 1-6, содержащее средство параметризации, которое предназначено и выполнено с возможностью предварительной настройки указанной по меньшей мере одной машины для обработки рыбы в соответствии с предварительно определенными данными параметризации, основанными на прогнозируемой переменной, определенной для каждой из рыбоприемных камер (22).
8. Устройство по любому из пп. 1-7, отличающееся тем, что второе транспортировочное средство (23) содержит второе измерительное средство (24), выполненное с возможностью регистрации второго массового расхода рыбы, перемещаемой из шнекового резервуара (14) к указанной по меньшей мере одной машине для обработки рыбы, расположенной ниже по потоку.
9. Устройство по п. 8, отличающееся тем, что средство управления содержит второй блок управления, который выполнен с возможностью управления скоростью транспортирования второго транспортировочного средства (23) путем сравнения зарегистрированного значения второго массового расхода с заданной производительностью указанной по меньшей мере одной машины для обработки рыбы, так чтобы второй массовый расход соответствовал по меньшей мере по существу производительности указанной по меньшей мере одной машины для обработки рыбы.
10. Устройство по любому из пп. 1-9, содержащее распределительное средство (25), выполненное с возможностью произвольной загрузки одной из рыбоприемных камер (22), причем распределительное средство (25) содержит распределительное транспортировочное средство (26), предназначенное для забора рыбы с первого транспортировочного средства (13), и направляющий элемент (27), выполненный с возможностью перемещения вдоль винтового транспортера (19) между первым концом (17) и вторым концом (18) для обеспечения перемещения рыбы в одну из рыбоприемных камер (22).
11. Способ обработки рыбы, включающий следующие этапы:
оглушение и начало обескровливания рыбы с помощью средства (10) для убоя рыбы,
регистрацию количества рыбы с помощью средства для подсчета,
перемещение оглушенной рыбы к шнековому резервуару (14) с помощью первого транспортировочного средства (13),
регистрацию первого массового расхода оглушенной рыбы во время перемещения посредством первого измерительного средства (15), причем шнековый резервуар (14) содержит приемный контейнер (16), который выполнен с возможностью приема жидкости и в котором с возможностью вращения расположен винтовой транспортер (19), проходящий от первого конца (17) ко второму концу (18), при этом винтовой транспортер (19) вместе с внутренней стенкой (21) приемного контейнера (16) образует рыбоприемные камеры (22), причем винтовой транспортер (19) выполнен с возможностью приведения во вращение посредством первого приводного блока (20) для транспортирования рыбы, находящейся в рыбоприемных камерах (22), через указанную жидкость в направлении второго конца (18) приемного контейнера (16) посредством винтового транспортера (19),
перемещение рыбы к по меньшей мере одной машине для обработки рыбы, расположенной ниже по потоку от шнекового резервуара (14), посредством второго транспортировочного средства (23), расположенного у второго конца (18) приемного контейнера (16), и
определение прогнозируемой переменной, связанной с количеством рыбы, для по меньшей мере одной из рыбоприемных камер (22) на основании зарегистрированных значений количества рыбы и первого массового расхода посредством вычислительного блока средства управления, к которому присоединены по меньшей мере следующие компоненты: средство (12) для подсчета рыбы, первое измерительное средство (15) и первый приводной блок (20), причем средство управления содержит указанный вычислительный блок.
12. Способ по п. 11, отличающийся тем, что определяют средний вес рыбы в каждой рыбоприемной камере (22) в качестве соответствующей прогнозируемой переменной на основании зарегистрированных значений первого массового расхода и количества рыбы.
13. Способ по п. 12, отличающийся тем, что определяют прогнозируемые значения распределения рыбы по размерам, которые дают информацию о соответствующих значениях веса отдельных рыб, находящихся в рыбоприемных камерах, в качестве дополнительных прогнозируемых переменных посредством блока прогнозирования на основании средних значений веса рыб, определенных с помощью по меньшей мере одного заданного набора данных о распределении рыбы по размерам для каждой из рыбоприемных камер (22).
14. Способ по п. 12 или 13, отличающийся тем, что определяют расчетные значения общего веса посредством блока прогнозирования для каждой из рыбоприемных камер (22), причем указанные расчетные значения представляют собой значения общего веса всех рыб, находящихся в любой из рыбоприемных камер (22).
15. Способ по любому из пп. 11-14, отличающийся тем, что определяют прогнозируемую переменную объема на основании количества рыбы и первого массового расхода, причем указанная переменная объема представляет собой объем рыбы, перемещаемой к шнековому резервуару (14) за единицу времени.
16. Способ по п. 15, отличающийся тем, что регулируют скорость транспортирования, с которой рыбу, находящуюся в рыбоприемных камерах (22), транспортируют с помощью винтового транспортера (19), посредством первого блока управления путем сравнения заданного объема заполнения приемных камер и прогнозируемой переменной объема, при этом работу первого приводного блока (20) осуществляют так, чтобы объем рыбы, находящейся в соответствующих рыбоприемных камерах (22), не превышал заданный объем заполнения приемных камер.
17. Способ по любому из пп. 11-16, отличающийся тем, что выполняют предварительную настройку указанной по меньшей мере одной машины для обработки рыбы в соответствии с предварительно определенными данными параметризации, основанными на прогнозируемой переменной, определенной для каждой из рыбоприемных камер (22).
18. Способ по любому из пп. 11-17, отличающийся тем, что регистрируют, посредством второго измерительного средства (24), второй массовый расход рыбы, перемещаемой вторым транспортировочным средством (23) из шнекового резервуара (14) к указанной по меньшей мере одной машине для обработки рыбы, расположенной ниже по потоку.
19. Способ по п. 18, отличающийся тем, что регулируют скорость транспортирования второго транспортировочного средства (23) путем сравнения зарегистрированного значения второго массового расхода с заданной производительностью указанной по меньшей мере одной машины для обработки рыбы так, чтобы второй массовый расход соответствовал по меньшей мере по существу производительности указанной по меньшей мере одной машины.
20. Способ по любому из пп. 11-19, отличающийся тем, что произвольно загружают одну из рыбоприемных камер (22) посредством распределительного средства (25), при этом рыбу перемещают с первого транспортировочного средства (13) на распределительное транспортировочное средство (26) и передают в одну из рыбоприемных камер (22) посредством направляющего элемента (27), выполненного с возможностью перемещения вдоль винтового транспортера (19) между первым концом (17) и вторым концом (18).
| WO 2016170550 A1, 27.10.2016 | |||
| ИНГИБИТОР КИСЛОТНОЙ КОРРОЗИИ | 2003 |
|
RU2245941C1 |
| WO 2017027511 A1, 16.02.2017 | |||
| US 6308529 B1, 30.10.2001 | |||
| WO 2016135758 A1, 01.09.2016. | |||

