1. Область техники, к которой относится изобретение
Изобретение относится к устройству регулирования воздушного винта турбовинтового двигателя. В частности, изобретение относится к устройству регулирования воздушного винта с переменным углом установки лопастей, то есть винта, лопасти которого могут поворачиваться вокруг своей оси.
2. Уровень техники
Турбовинтовой двигатель является средством обеспечения движения, используемым, в частности, на некоторых летательных аппаратах и содержащим газовую турбину и воздушный винт. Винты большинства современных турбовинтовых двигателей содержат лопасти с переменным углом установки. Винт с переменным углом установки (или шагом) лопастей оснащен механизмом, позволяющим регулировать угол установки лопастей, то есть угол между опорной хордой лопасти и ее плоскостью вращения. Регулирование угла установки лопастей позволяет корректировать характеристики винта таким образом, чтобы оптимизировать рабочие характеристики турбовинтового двигателя в широкой области полета. Например, при фазах взлета и набора высоты летательного аппарата, как правило, необходим большой шаг для поддержания надлежащей скорости винта при высоких значениях мощности. В фазах полета на крейсерской скорости, как правило, необходим меньший шаг для поддержания надлежащей скорости винта при более низких значениях мощности. Во время посадки, как правило, необходим отрицательный шаг для замедления движения летательного аппарата и сокращения расстояния его торможения. Следовательно, необходимо иметь устройство регулирования, позволяющее изменять шаг лопастей винта во время полета.
Как правило, управление винтами с переменным углом установки происходит в соответствии с двумя режимами работы, зависящими от фаз полета летательного аппарата. При низких режимах двигателя напрямую регулируют шаг винта. Этот режим будет называться во всем тексте описания «бета-режимом». При боле высоких режимах двигателя скорость винта регулируют по оптимальной рабочей точке. Этот режим будет называться во всем тексте описания «режимом скорости».
Таким образом, необходимо одновременно располагать системой регулирования для бета-режима, которая автоматически регулирует шаг по заданному значению шага, и системой регулирования для режима скорости, которая автоматически регулирует скорость винта по заданному значению скорости. Эти заданные значения шага и скорости являются либо фиксированными, либо задаваемыми извне при помощи механических тросов или электрических сигналов.
В настоящее время существуют три большие группы систем регулирования воздушного винта: электрическое регулирование, электро-гидравлическое регулирование и гидромеханическое регулирование.
На практике, электрическое регулирование и регулирование при помощи сервоклапана применяют не для всех случаев использования по причине либо общего веса системы (это относится, в частности, к случаю регулирования при помощи сервоклапана), совокупной стоимости (это относится, в частности, к случаю электрического регулирования и регулирования при помощи сервоклапана) или недостаточного уровня доработки (это относится, в частности, к случаю электрического регулирования).
Принцип гидромеханического регулирования основан на воздействии давлением масла на поршень, неподвижно соединенный с механизмом, приводящим лопасти во вращение вокруг их оси. Поршень установлен, например, в цилиндре в ступице винта и образует одну или две камеры давления. При этом говорят о винте двойного действия, когда давление может действовать с каждой стороны поршня. Говорят о винте простого действия, если давление может действовать только с одной стороны поршня. В этом случае обратный ход поршня происходит под действием пружины и инерционных грузов, расположенных на ножке каждой лопасти.
Как известно, устройство регулирования воздушного винта с переменным углом установки содержит первый гидромеханический механизм автоматического регулирования шага лопастей винта по заданному значению шага и второй гидромеханический механизм автоматического регулирования скорости вращения винта по заданному значению скорости.
Как правило, первый гидромеханический механизм автоматического регулирования шага содержит золотник, приводимый в действие винтом, с одной стороны (что позволяет получить копию угла лопастей), и механическую систему тяг, приводимую в действие пилотом для передачи заданного значения шага.
Второй гидромеханический механизм автоматического регулирования скорости содержит регулятор скорости на базе вращающихся инерционных грузов.
Таким образом, в режиме скорости вращающаяся система с инерционными грузами, приводимая во вращение редуктором двигателя со скоростью, пропорциональной скорости винта, приводит в действие золотник, который управляет напрямую или через гидравлический усилитель поршнем винта и, следовательно, его шагом. Калибровка возвратной пружины, действующей на инерционные грузы, определяет заданную скорость. Эту заданную скорость можно изменять, например, действуя на калибровку пружины через механический трос или электроклапан типа «все или ничего». В бета-режиме гидравлические золотники, механически связанные с заданным значением шага, и повторитель шага позволяют автоматически регулировать шаг по заданному значению. Заданное значение шага механически передается на золотник через механическую систему тяг, управляемую из кабины экипажа.
Это решение имеет два недостатка. С одной стороны, управление заданным значением скорости посредством воздействия на возвратную пружину является либо двоичным (возможность выбора 2 скоростей), либо происходит через механическую систему тяг, не позволяющую осуществлять управление при помощи электронного устройства, такого как вычислительное устройство регулирования двигателя. С другой стороны, управление заданным значением шага происходит через механическую тягу, связанную с рычагами в кабине экипажа, и, следовательно, не позволяет управлять шагом напрямую при помощи электронного вычислительного устройства регулирования.
В связи с этим авторы изобретения поставили перед собой задачу усовершенствовать принцип гидромеханического регулирования воздушного винта с переменным углом установки лопастей.
3. Задачи изобретения
Задачей изобретения является устранение по меньшей мере некоторых недостатков известных устройств регулирования воздушного винта с переменным углом установки лопастей.
В частности, по меньшей мере в одном варианте выполнения изобретение призвано предложить устройство регулирования воздушного винта с переменным углом установки лопастей, которое больше не нуждается в механических тягах, связанных с кабиной экипажа, для управления винтом в бета-режиме.
По меньшей мере в одном варианте выполнения изобретение призвано также предложить устройство, которое обеспечивает электрическое взаимодействие с электронным вычислительным устройством регулирования.
По меньшей мере в одном варианте выполнения изобретение призвано также предложить устройство, которое имеет меньшую массу и более низкую стоимость по сравнению с известными устройствами регулирования.
4. Раскрытие изобретения
В связи с вышеизложенным, объектом изобретения является устройство регулирования воздушного винта с переменным углом установки лопастей авиационного двигателя, например, турбовинтового двигателя или двигателя с открытым ротором, содержащее первый гидромеханический механизм автоматического регулирования шага лопастей винта по заданному значению шага и второй гидромеханический механизм автоматического регулирования скорости вращения винта по заданному значению скорости.
Заявленное устройство регулирования воздушного винта отличается тем, что содержит также единый электромеханический привод, содержащий подвижный приводной орган, механически связанный одновременно с упомянутым первым гидромеханическим механизмом автоматического регулирования шага для управления заданным значением шага и с упомянутым вторым гидромеханическим механизмом автоматического регулирования скорости для управления заданным значением скорости.
Таким образом, заявленное устройство регулирования содержит единый электромеханический привод, который позволяет управлять одновременно заданным значением скорости и заданным значением шага. Это управление происходит через подвижный приводной орган, который механически связан одновременно с первым гидромеханическим механизмом и с вторым гидромеханическим механизмом. Использование единого привода стало возможным, так как авторы изобретения установили, что режим скорости и бета-режим не используются в одних и тех же фазах полета. Следовательно, можно использовать только один электромеханический привод для управления либо заданным значением скорости в соответствующих фазах полета, либо заданным значением шага в соответствующих фазах полета. Кроме того, электромеханический привод выполнен с возможностью принимать электрические команды и соответственно приводить в действие подвижный приводной орган. Таким образом, заявленное устройство регулирования позволяет использовать единый электрический привод для управления заданным значением шага и заданным значением скорости. Иначе говоря, заявленное устройство позволяет отказаться от размещения механических тросов в кабине экипажа, так как управление бета-режимом и режимом скорости происходит напрямую при помощи электрической команды, подаваемой на электромеханический привод. Кроме того, изобретение позволяет использовать только один интерфейс для управления обоими режимами работы воздушного винта.
Предпочтительно, согласно изобретению, подвижный приводной орган упомянутого электромеханического привода выполнен с возможностью перемещения по меньшей мере в одном первом диапазоне положений, в котором он приводит в действие упомянутый первый гидромеханический механизм для определения заданного значения шага, и по меньшей мере в одном втором диапазоне положений, в котором он приводит в действие упомянутый второй гидромеханический механизм для определения заданного значения скорости.
Согласно первому варианту изобретения, эти два диапазона положений отличаются друг от друга таким образом, что в первом диапазоне положений подвижный приводной орган определяет заданное значение шага и поддерживает постоянное заданное значение скорости; во втором диапазоне положений подвижный приводной орган определяет заданное значение скорости и поддерживает постоянное заданное значение шага.
Иначе говоря, согласно этому варианту, подвижный приводной орган выполнен с возможностью поддерживать постоянное заданное значение скорости на упомянутом втором механизме, когда он находится в упомянутом первом диапазоне положений, и поддерживать постоянное заданное значение шага на упомянутом первом механизме, когда он находится в упомянутом втором диапазоне положений.
Согласно другому варианту, оба диапазона положений взаимосвязаны таким образом, что подвижный приводной орган действует независимо от своего положения одновременно на заданное положение скорости и на заданное положение шага.
Предпочтительно, согласно изобретению, подвижный приводной орган выполнен с возможностью перемещаться по меньшей мере в одном третьем диапазоне положений, называемом нейтральным диапазоном, в котором он не производит никакого существенного действия ни на один из двух гидромеханических механизмом.
Согласно этому варианту, подвижный приводной орган может перемещаться в нейтральном диапазоне, в котором он не оказывает существенного влияния на заданные значения скорости и шага.
Предпочтительно, согласно изобретению, второй гидромеханический механизм содержит гидравлический золотник, выполненный с возможностью гидравлически управлять шагом винта и связанный с инерционными грузами, которые могут механически перемещаться со скоростью, пропорциональной скорости винта, и возвратную пружину инерционных грузов, при этом подвижный приводной орган электромеханического привода выполнен с возможностью воздействовать на напряжение возвратной пружины инерционных грузов. Это действие на напряжение возвратной пружины инерционных грузов позволяет модулировать заданное значение скорости.
Предпочтительно, согласно изобретению, первый гидромеханический механизм содержит по меньшей мере один гидравлический золотник, выполненный с возможностью гидравлически управлять шагом винта и перемещаемый механически системой тяг, связанной с повторителем шага винта, при этом упомянутый подвижный приводной орган упомянутого электромеханического привода выполнен с возможностью воздействовать на упомянутый гидравлический золотник для модулирования заданного значения шага винта.
Предпочтительно, согласно изобретению, подвижный приводной орган, механически связанный с упомянутыми первым и вторым гидромеханическими механизмами, содержит по меньшей мере один кулачок, имеющий профиль, определяющий правило приведения в действие первого и второго гидромеханических механизмов в зависимости от углового положения каждого кулачка.
Предпочтительно, согласно изобретению, упомянутый электромеханический привод выбирают из группы, в которую входят шаговый двигатель, двигатель постоянного тока или двухходовой, одноходовой или избыточный двигатель.
Объектом изобретения является также авиационный двигатель типа турбовинтового двигателя или двигателя с открытым ротором или, в целом, двигатель, оснащенный лопастями с переменным углом установки, содержащий заявленное устройство регулирования.
Объектами изобретения являются также устройство регулирования и авиационный двигатель, оснащенный таким устройством регулирования, характеризующиеся в комбинации всеми или частью упомянутых выше или описанных ниже отличительных признаков.
5. Список фигур
Другие задачи, отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания, представленного исключительно в качестве не ограничительного примера со ссылками на прилагаемые фигуры, на которых:
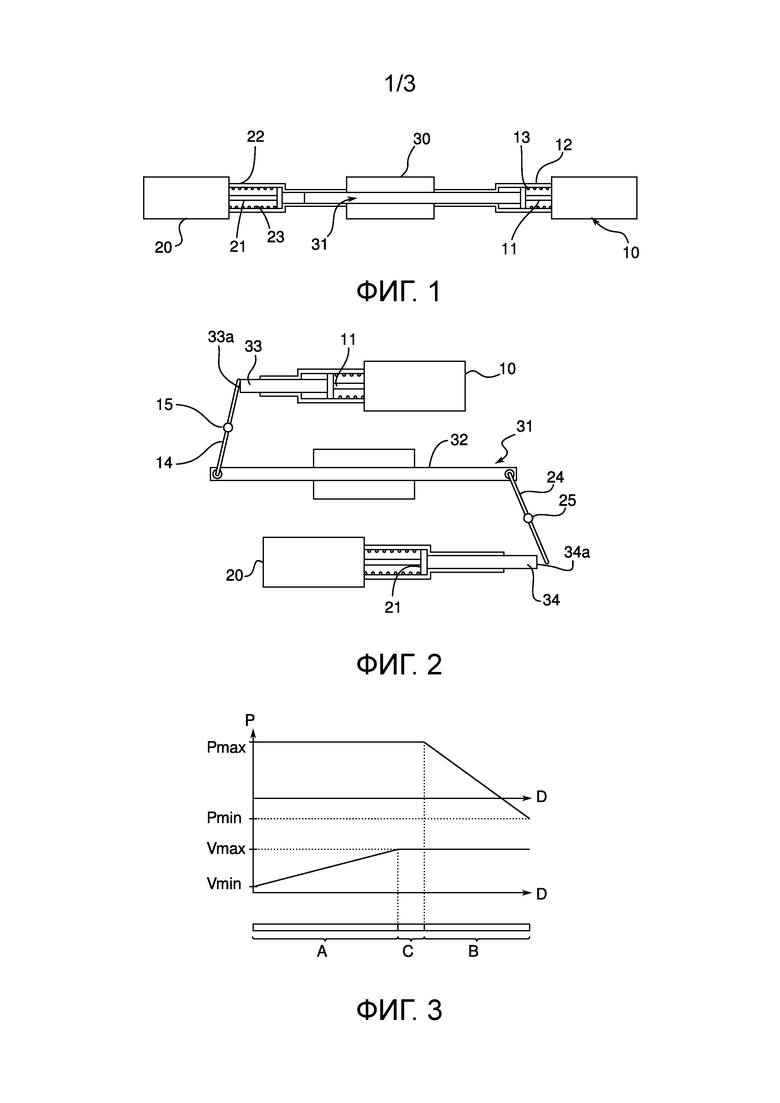
Фиг. 1 схематично иллюстрирует принцип работы заявленного устройства регулирования.
Фиг. 2 - схематичный вид устройства регулирования согласно варианту выполнения изобретения с применением линейного электромеханического привода.
Фиг. 3 - кривые изменения заданных значений в зависимости от положения подвижного приводного органа устройства регулирования согласно варианту выполнения изобретения.
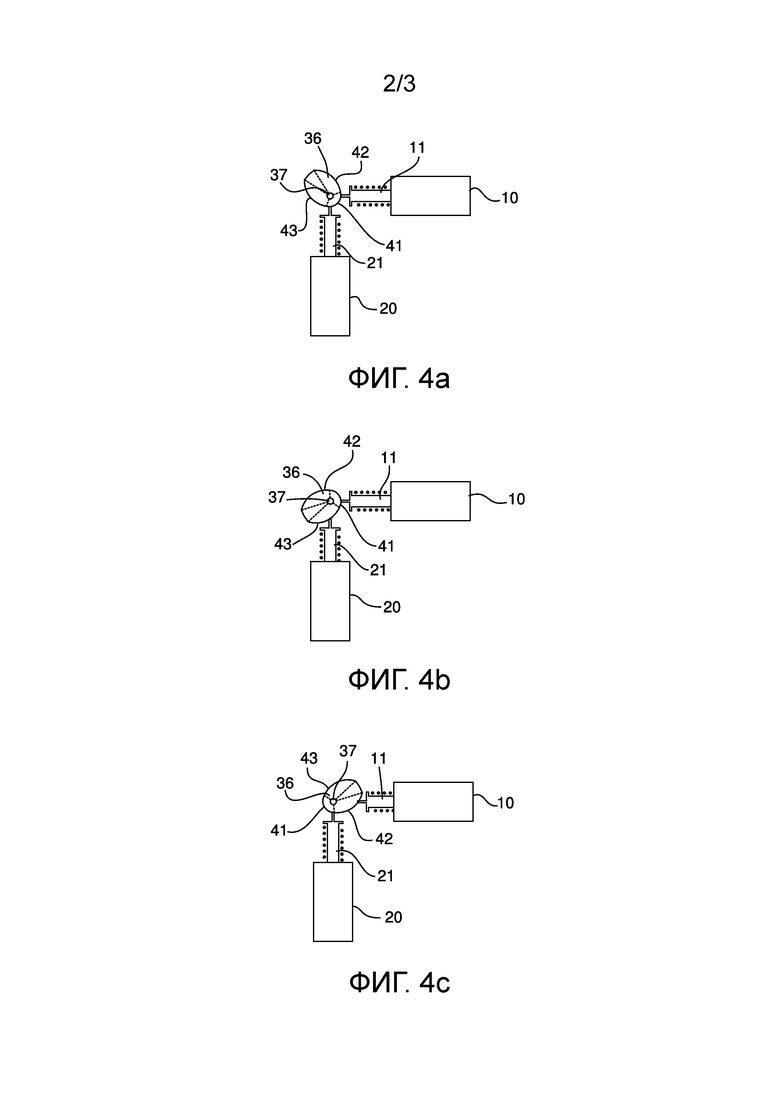
Фиг. 4а, 4b, 4с - схематичные виды устройства регулирования согласно другому варианту выполнения изобретения с применением вращающегося электромеханического привода в разных режимах работы.
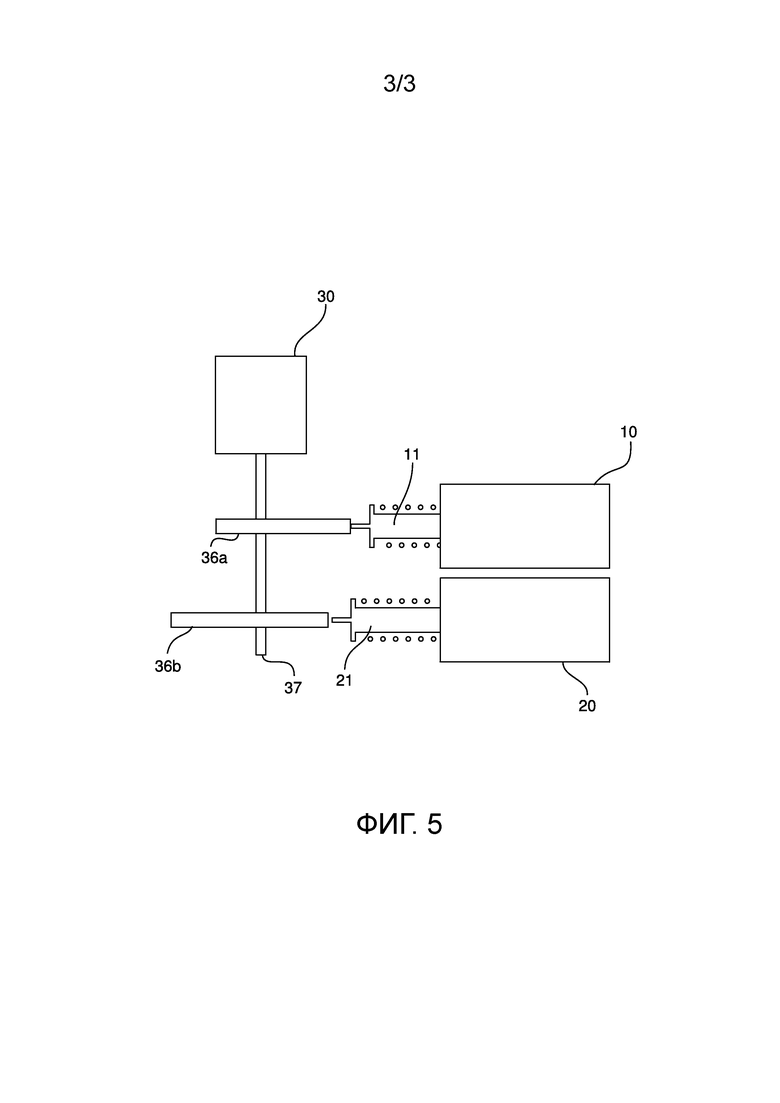
Фиг. 5 - схематичный вид устройства регулирования согласно другому варианту выполнения изобретения с применением вращающегося электромеханического привода, содержащего два разных кулачка.
6. Подробное описание варианта выполнения изобретения
В целях иллюстрации и для большей ясности на фигурах масштабы и пропорции строго не соблюдены. В дальнейшем тексте подробного описания со ссылками на фигуры идентичные, подобные или аналогичные элементы имеют одинаковые обозначения.
Согласно изобретению, устройство регулирования винта с переменным шагом лопастей газотурбинного двигателя содержит первый гидромеханический механизм автоматического регулирования шага лопастей винта, называемый в дальнейшем первым механизмом и обозначаемый на фигурах позицией 10. Устройство регулирования содержит также второй гидромеханический механизм автоматического регулирования скорости вращения винта, называемый в дальнейшем вторым механизмом и обозначаемый на фигурах позицией 20.
Подробное описание первого и второго механизмов опускаются, так как изобретение в основном касается средств управления этими механизмами, а не самих механизмов, которые к тому же хорошо известны специалисту в данной области. Кроме того, эти первый и второй механизмы могут использовать общие средства, такие как золотники, поршни, инерционные грузы и т.д., даже если для упрощения и ясности они показаны на фигурах как отдельные механизмы.
Первый механизм 10 и второй механизм 20 выполнены с возможностью действовать гидромеханически на шаг винтов и действовать опосредованно на скорость винта.
Заявленное устройство дополнительно содержит электромеханический привод 30, содержащий подвижный приводной орган 31, механически связанный одновременно с первым механизмом 10 и с вторым механизмом 20.
Согласно варианту выполнения, представленному на фиг. 1 и 2, привод 30 является линейным приводом.
Согласно варианту выполнения, представленному на фиг. 1, подвижный приводной орган 31 является подвижным штоком. Этот подвижный шток может перемещаться для приведения в действие либо первого механизма 10, например, через поршень 11, установленный в цилиндре 12 и подпружиненный пружиной 13, либо второго механизма 20, например, через поршень 21, установленный в цилиндре 22 и подпружиненный пружиной 23. Согласно частному варианту выполнения, поршень 11 и 21, цилиндр 12 и 22 и пружина 13 и 23 могут быть установлены в механизмах 10 и 20.
Согласно другому варианту выполнения, представленному на фиг. 2, подвижный приводной орган 31 содержит первый шток 32, приводимый в действие непосредственно электрической командой, поступающей на привод, и два штока 33, 34, соединенные соответственно с поршнями 11, 21 через тяги 14, 24, установленные, каждая, с возможностью поворота вокруг соответствующих поворотных осей 15, 25. Таким образом, в зависимости от направления перемещения штока перемещение подвижного штока 32 приводит либо к регулированию заданного значения шага, либо к регулированию заданного значения скорости через тяги 14, 24, штоки 33, 34 и поворотные оси 15, 25. Например, если шток 32 перемещается влево на фиг. 2, тяга 14 поворачивается вокруг поворотной оси 15 таким образом, что ее верхний конец входит в механический контакт с концом 33а штока 33 и толкает поршень 11, неподвижно соединенный в перемещении с штоком 33, что обеспечивает регулирование заданного значения шага. С другой стороны, если шток 32 перемещается вправо на фиг.2, тяга 24 поворачивается вокруг поворотной оси 25 таким образом, что ее нижний конец входит в механический контакт с концом 34а штока 34 и толкает поршень 21, неподвижно соединенный в перемещении с штоком 34, что обеспечивает регулирование заданного значения скорости.
Конфигурации, показанные на фиг. 1 и 2, позволяют сформировать первый диапазон А положений, в котором подвижный приводной орган 31 приводит к действие первый гидромеханический механизм 10 для определения заданного значения шага, и второй диапазон В положений, в котором подвижный приводной орган 31 приводит к действие второй гидромеханический механизм 20.
На фиг. 1 приводной орган 31 находится в одном положении из диапазона А положений. Действительно, отмечается, что приводной орган 31 входит в контакт с поршнем 11 и напрямую действует на поршень таким образом, что влияет на управление шагом винта. Если приводной орган 31 перемещают в направлении поршня 21, то он придет в одно положение из второго диапазона В положений, в котором он приводит в действие упомянутый второй гидромеханический механизм 20 для определения заданного значения скорости.
Отмечается также, что конфигурация, показанная на фиг. 1, позволяет сформировать диапазон С положений, в котором приводной орган 31 не действует ни на один из двух поршней 11 или 21, поэтому в этой нейтральной зоне не происходит управления ни шагом, ни скоростью.
На фиг. 3 показаны определенные таким образом различные диапазоны А, В и С, связанные с ходом D подвижного приводного органа 31, и соответствующие заданные значения скорости V и шага Р. Заданные значения скорости V и шага Р изменяются соответственно между крайними значениями Vmax и Vmin и Pmax и Pmin в соответствии с ходом D подвижного приводного органа.
Согласно другому варианту выполнения, представленному на фиг. 4а, 4b и 4с, подвижный приводной орган содержит кулачок 36, профиль которого определяет правило приведения в действие первого и второго гидромеханических механизмов в зависимости от углового положения кулачка 36. Этот кулачок 36 установлен с возможностью поворота вокруг оси 37. Кроме того, кулачок 36 имеет профиль, поделенный на три главных сектора, а именно на сектор 41 в виде дуги окружности, называемый постоянным сектором, некруглый сектор 43, называемый сектором скоростей, и некруглый сектор 42, называемый сектором шага. Сектора 42, 43 образуют сектора управления. Кроме того, оба поршня 11, 21 первого и второго механизмом выполнены таким образом, чтобы входить в контакт с кулачком 36. В зависимости от углового положения кулачка каждый поршень может приводиться в движение одним или другим из секторов профиля кулачка.
Когда кулачок поворачивается вокруг оси 37, чтобы привести дугообразный сектор 41 в положение упора в поршень первого или второго механизма, этот механизм удерживается в постоянном положении. Действительно, пока кулачок удерживает сектор 41 в контакте с поршнем, расстояние, отделяющее ось 37 от конца профиля напротив поршня, остается постоянным. Сжатие поршня напротив кулачка остается, таким образом, постоянным. Иначе говоря, пока поршень остается к контакте с этим дугообразным сектором, его положение не меняется. Таким образом, речь идет о постоянном секторе для управления. Этот сектор может иметь угловой диапазон, превышающий угол, образованный двумя поршнями (в данном случае 90°), чтобы создавать угловой диапазон, в котором перемещение привода не влияет ни на заданное значение положения, ни на заданное значение шага. Речь идет о вышеупомянутой нейтральной зоне.
С другой стороны, когда кулачок поворачивается вокруг оси 37, чтобы привести сектор 42, 43 управления напротив и в контакт с поршнем, любое вращение кулачка приводит к поступательному перемещению этого находящегося напротив поршня. Действительно, расстояние, отделяющее ось 37 от конца профиля, находящегося напротив поршня, меняется, учитывая, что профиль не является круглым.
На фиг. 4а кулачок 36 ориентирован таким образом, что каждый поршень входит в контакт с сектором 41. Речь идет о нейтральной зоне привода, который не действует ни на скорость, ни на шаг винта.
На фиг. 4b кулачок 36 ориентирован таким образом, что сектор 43 скоростей входит в контакт с поршнем 21 второго механизма 20. Таким образом, на всем этом диапазоне положений кулачок 36 определяет заданное значение скорости. Когда сектор 42 находится напротив поршня 21 механизма 20, постоянный сектор 41 находится напротив поршня 11 механизма 10, поэтому вращение кулачка на всем этом секторе не влияет на заданное значение шага.
На фиг. 4с кулачок 36 ориентирован таким образом, что сектор 42 скоростей входит в контакт с поршнем 11 первого механизма 10. Таким образом, на всем этом диапазоне положений кулачок 36 определяет заданное значение шага. Когда сектор 42 находится напротив поршня 11 механизма 10, постоянный сектор 41 находится напротив поршня 21 механизма 20, поэтому вращение кулачка на всем этом секторе не влияет на заданное значение скорости.
Согласно предпочтительной версии этого варианта выполнения, электромеханический привод приводит в движение два разных кулачка, при этом каждый кулачок выполнен с возможностью воздействовать только на одно заданное значение.
Например, как показано на фиг. 5, привод содержит первый кулачок 36а, выполненный с возможностью воздействовать на заданное значение шага, и второй кулачок 36b, выполненный с возможностью воздействовать на заданное значение скорости. На фиг. 5 кулачки показаны сбоку для большей наглядности и ясности. Каждый кулачок имеет специфический профиль, который определяет правило управления соответствующим заданным значением.
Изобретение не ограничивается только описанными вариантами выполнения. В частности, согласно варианту выполнения, представленному на фиг. 4а, 4b и 4с, сектора 42 и 43 имеют идентичные профили. Однако, согласно другим вариантам выполнения, каждый сектор скорости и шага может иметь собственный профиль для определения специфического правила управления. Таким образом, можно адаптировать правила управления в зависимости от специфических нужд, связанные с типом винта, для которого предназначено устройство регулирования.
Изобретение относится к воздушным винтам авиационных двигателей. Устройство регулирования воздушного винта с переменным углом установки лопастей авиационного двигателя содержит первый гидромеханический механизм (10) автоматического регулирования шага лопастей винта и второй гидромеханический механизм (20) автоматического регулирования скорости вращения винта, единый электромеханический привод (30). Упомянутый привод (30) содержит подвижный приводной орган (36), механически связанный одновременно с упомянутым первым гидромеханическим механизмом (10) автоматического регулирования шага для управления заданным значением шага и с упомянутым вторым гидромеханическим механизмом (20) автоматического регулирования скорости для управления заданным значением скорости. Изобретение обеспечивает электрическое взаимодействие с электронным вычислительным устройством регулирования, а также снижает массу устройства. 2 н. и 7 з.п. ф-лы, 7 ил.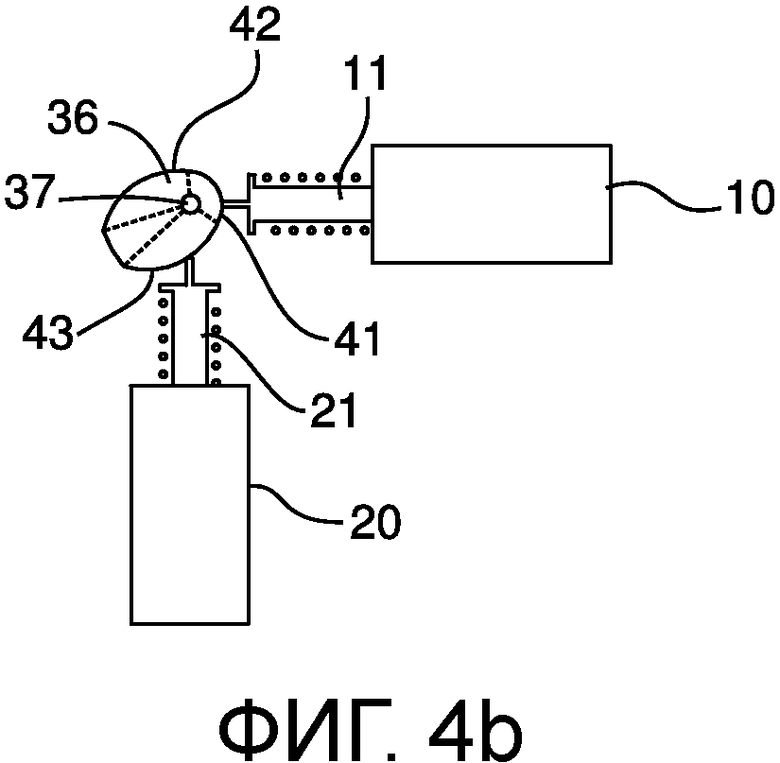
1. Устройство регулирования винта авиационного двигателя, причем лопасти винта имеют переменный угол установки, при этом устройство содержит первый гидромеханический механизм (10) автоматического регулирования шага лопастей винта до заданного значения шага и второй гидромеханический механизм (20) автоматического регулирования скорости вращения винта до заданного значения скорости,
отличающееся тем, что содержит единый электромеханический привод (30), содержащий подвижный приводной орган (31,36), механически связанный одновременно с первым гидромеханическим механизмом (10) автоматического регулирования шага для управления заданным значением шага и с упомянутым вторым гидромеханическим механизмом (20) автоматического регулирования скорости для управления заданным значением скорости.
2. Устройство по п. 1, отличающееся тем, что подвижный приводной орган (31,36) электромеханического привода выполнен с возможностью перемещения по меньшей мере в одном первом диапазоне положений, в котором он приводит в действие первый гидромеханический механизм (10) для определения заданного значения шага, и по меньшей мере в одном втором диапазоне положений, в котором он приводит в действие второй гидромеханический механизм (20) для определения заданного значения скорости.
3. Устройство по п. 2, отличающееся тем, что подвижный приводной орган (31,36) выполнен с возможностью поддерживать постоянное заданное значение скорости на втором механизме (20), когда он находится в первом диапазоне положений, и поддерживать постоянное заданное значение шага на первом механизме (10), когда он находится во втором диапазоне положений.
4. Устройство по одному из пп. 2 или 3, отличающееся тем, что подвижный приводной орган (31,36) выполнен с возможностью перемещения по меньшей мере в одном третьем диапазоне положений, называемом нейтральным диапазоном, в котором он не производит никакого существенного действия ни на один из двух гидромеханических механизмов.
5. Устройство по одному из пп. 1-4, отличающееся тем, что второй гидромеханический механизм (20) содержит гидравлический золотник, выполненный с возможностью гидравлического управления шагом винта и связанный с инерционными грузами, выполненными с возможностью механического перемещения со скоростью, пропорциональной скорости винта, и пружину возврата инерционных грузов, и тем, что подвижный приводной орган (31,36) электромеханического привода выполнен с возможностью воздействовать на напряжение пружины возврата инерционных грузов.
6. Устройство по одному из пп. 1-5, отличающееся тем, что первый гидромеханический механизм (10) содержит по меньшей мере один гидравлический золотник, гидравлически управляющий шагом винта и перемещаемый механически системой тяг, связанной с повторителем шага винта, и тем, что подвижный приводной орган (31,36) электромеханического привода выполнен с возможностью воздействия на гидравлический золотник.
7. Устройство по одному из пп. 1-6, отличающееся тем, что подвижный приводной орган, механически связанный с первым и вторым гидромеханическими механизмами, содержит по меньшей мере один кулачок (36), имеющий профиль, определяющий правило приведения в действие первого и второго гидромеханических механизмов в зависимости от углового положения каждого кулачка (36).
8. Устройство по одному из пп. 1-7, отличающееся тем, что электромеханический привод (30) выбран из группы, в которую входят шаговый двигатель, двигатель постоянного тока или двухходовой, одноходовой или избыточный двигатель.
9. Авиационный двигатель типа турбовинтового двигателя или двигателя с открытым ротором или в целом двигатель, оснащенный лопастями с переменным углом установки, содержащий устройство регулирования по пп. 1-8.
| УПАКОВОЧНЫЙ КОМПЛЕКТ ДЛЯ ТОВАРОВ | 1995 |
|
RU2144491C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ШЛИФОВАНИЯ ПОЛОТНИЩ ПИЛ | 1927 |
|
SU18108A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЕКТОРОМ ТЯГИ РЕАКТИВНОГО ДВИГАТЕЛЯ | 2012 |
|
RU2527798C2 |

