Изобретение относится к измерительной технике и может быть использовано при обработке и преобразовании данных с инклинометров, выполненных на основе трехосевых акселерометров и магнитометров, которые применяются в геофизических работах с применением технологии больших данных и машинного обучения.
Скважинные инклинометры функционируют в достаточно большом диапазоне температур (от минус двадцати градусов Цельсия у поверхности Земли до плюс ста семидесяти в глубине скважины) и в магнитных полях с различной напряженностью. Поэтому основной проблемой при калибровке инклинометров является определение температурных и магнитных поправок, влияющих на работу входящих в их состав датчиков, а также на материалы, из которых изготавливают инклинометры (поскольку они могут также менять свои магнитные свойства при нагреве, что отражается на магнитной обстановке в области измерений датчиков инклинометра).
Известен способ калибровки акселерометрического трехосевого инклинометра (патент № RU 2577806, МПК G01C25/00, опубликован 25.11.2014 г.), заключающийся в определении относительных коэффициентов чувствительности акселерометра между осями, а также статических ошибок акселерометра по каждой оси. Калибровка выполняется с поочередным выбором одной оси вращения и определением коэффициентов и ошибок для двух других осей.
Недостатком известного способа является то, что он не учитывает существование зависимостей между температурой инклинометра и показаниями акселерометров. Кроме того, данный способ не учитывает влияние показаний магнитометров на фактические углы наклона инклинометра.
Наиболее близким является способ калибровки (патент CN 103868527, МПК G01С25/00, опубликован 18.06.2014 г.), в котором использовано 18 статичных положений наклона трехосевого акселерометра для расчета оптимальных коэффициентов чувствительности.
Недостатком данного способа является использование единичных постоянных линейных коэффициентов, которые не позволяют минимизировать погрешности акселерометра на всех значениях углов наклона в трех осях. Также в число калибруемых положений не включены температурные интервалы диапазона работ акселерометра.
Задачей, на решение которой направлено заявляемое изобретение, является возможность высокоточного способа определения положения скважин.
Технический результат изобретения заключается в самокалибровке инклинометра, позволяющей в каждом случае определять его истинное пространственное положение и, соответственно, истинное пространственное положение скважины.
Технический результат достигается за счет того, что в способе калибровки инклинометра для определения пространственного положения нефтяных и газовых скважин инклинометр калибруют, вращая внутри термостабилизированного устройства, фиксируя при каждом изменении его положения данные с акселерометров и магнитометров и преобразуя их в азимутальный, зенитный и апсидальный углы наклона, при этом вращение инклинометра производят во всем диапазоне измеряемых углов с одновременным изменением температуры внутри термостабилизированного устройства в диапазоне от - 20 °С до 170 °С, а определение корреляционных зависимостей результатов измерений каждого из трех углов наклона инклинометра от значений других углов производят для каждого значения температуры нагрева инклинометра и напряженности магнитного поля внутри устройства.
При этом на осях вращения устройства возможна установка поверенных средств измерений, а именно: на оси вращения азимутальных углов закрепление теодолита, а на осях вращения зенитных и апсидальных углов – оптического квадранта.
Это обеспечивает высокую точность задания действительных углов с документально подтвержденной погрешностью.
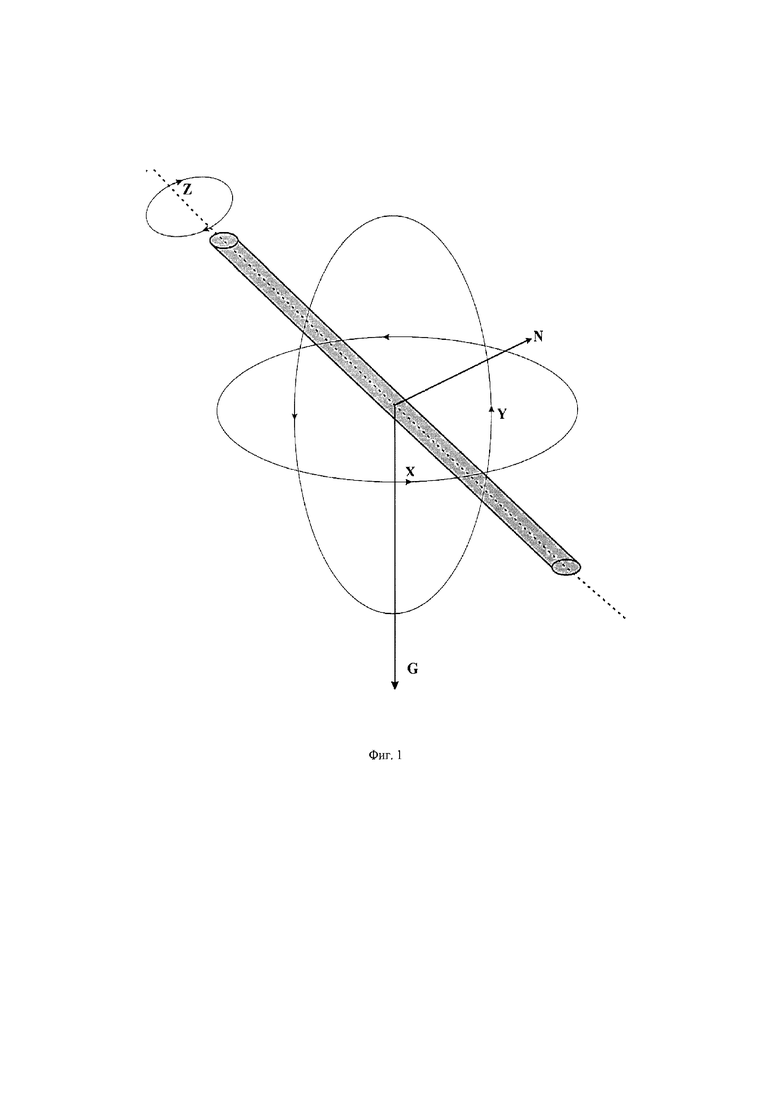
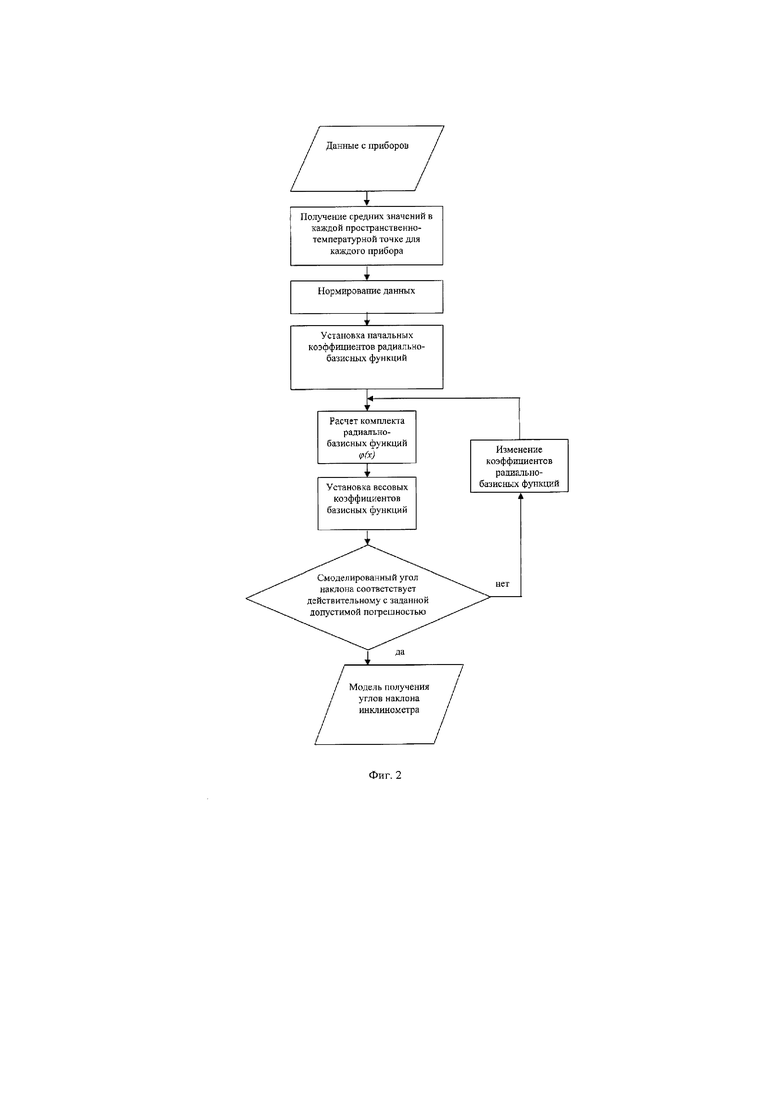
Заявляемое техническое решение поясняется чертежами, где на фиг. 1 представлена схема ориентации инклинометра в пространстве, где G – направление силы тяжести; N – направление на север; X – азимутальная ось поворота инклинометра; Y – зенитная ось поворота инклинометра; Z – апсидальная ось поворота инклинометра, а на фиг.2 представлена принципиальная блок-схема алгоритма получения оптимальных функций преобразования сигналов в углы вращения.
Осуществление изобретения реализуется следующим образом:
Инклинометр, в общем случае, может иметь в своем составе не менее 3 датчиков акселерометров и от одного до трех датчиков магнитометров. Для изобретения количество и тип датчиков является несущественным, поскольку изменяет только число входных данных в алгоритме расчетов, и, следовательно, скорость вычисления. Положение в пространстве инклинометра: азимутальный (α), зенитный (β)и апсидальный (γ) углы выражаются системой уравнений:
 , (1)
, (1)
где f1, f2, f3 – непрерывные функции преобразования сигналов K различных акселерометров P различных магнитометров  и температуры нагрева инклинометра T.
и температуры нагрева инклинометра T.
Функции f1, f2, f3 моделируются комбинацией непрерывных радиально-базисных функций. Данные функции определяются при настройке инклинометров. Входными данными для их определения являются показания акселерометров, магнитометров и действительная температура инклинометра, а результатом - азимутальный (α), зенитный (β) и апсидальный (γ) углы поворота инклинометра. При начальной настройке эти углы задаются с помощью автоматизированной трехосевой установки в нагревательной термостабилизированной камере, теодолита и оптического квадранта и являются известными с определенной доверительной погрешностью, которая определяет максимальную точность расчетного алгоритма.
Входные данные могут иметь зашумление и случайную погрешность. Для того чтобы снизить влияние данных факторов используют многократное измерение акселерометров и магнитометров в каждой пространственно-температурной точке, после чего применяют усреднение входных данных по формуле:
 ,
,
где xi – входное значение датчика, при заданных углах поворота и температуре;
P – число измерений, выполненных датчиком, при заданных углах поворота и температуре. Для работы алгоритма необходимо, чтобы P было не менее 10.
Поскольку акселерометры и магнитометры измеряют разные физические величины, а также могут иметь смещенные «нули» измеряемых шкал, то входные данные подвергают предварительной нормировке по формуле:
 ,
,
где – нормированное входное значение датчика, при заданных углах поворота и температуре.
– нормированное входное значение датчика, при заданных углах поворота и температуре.
Mx и Dx – выборочные оценки математического ожидания и дисперсии показаний данного датчика (акселерометра или магнитометра), которые вычисляют по формулам:
 ,
,
 ,
,
где n – общее число выполненных измерений.
Для поиска оптимальных функции f1, f2, f3, при которых погрешность инклинометра будет минимальной применяют алгоритм нейросетевой обучающейся системы - сеть радиально-базисных функций φ(x) с промежуточным нейронным слоем в виде радиальных элементов, которые вычисляют по формуле:
 ,
,
где r – коэффициент определения радиуса влияния каждой базисной функции и быстроты стремления к нулю при удалении от центра;
c – коэффициент центров радиально-базисной функции.
Коэффициенты r и c рассчитываются численно как удовлетворяющие данным результата настройки инклинометра.
Результатом работы всей нейросети будут функции преобразования сигналов f(φ), которые вычисляют по формуле:
 ,
,
где m – число радиально-базисных функций, примененных для данной задачи;
wj – коэффициент веса j-й радиально-базисной функции в результирующей функции f(φ).
Коэффициенты веса wj в начальном приближении алгоритма принимаются равными 1, но при численном применении алгоритма рассчитываются как удовлетворяющие данным результата настройки инклинометра. За счет различных коэффициентов веса для базисных функций с различных датчиков, получают корреляционные зависимости между сигналами различных датчиков инклинометра. Благодаря этим зависимостям делают вывод о значимости того или иного датчика, что позволяет в дальнейшем изменить конструкцию инклинометра для повышения эффективности его составляющих.
Число радиально-базисных функций напрямую зависит от заданной точности аппроксимации и его рассчитывают экспериментально из соотношения времени и вычислительных ресурсов для решения задачи к коэффициенту детерминации, который вычисляют по формуле:
 ,
,
где yi – истинные значения азимутальных, зенитных или апсидальных углов поворота инклинометра по результатам эксперимента;
 – аппроксимированные значения азимутальных, зенитных или апсидальных углов поворота;
– аппроксимированные значения азимутальных, зенитных или апсидальных углов поворота;
My – среднее значение экспериментальной выборки истинных значений азимутальных, зенитных или апсидальных углов поворота.
Непосредственно калибровку инклинометра осуществляют в следующем порядке:
1. Подключают питание к инклинометру, включают его и проверяют, работу всех датчиков (если все датчики не работают, осуществляют проверку элемента питания инклинометра. Если не работает часть датчиков, осуществляют проверку подачи питания на эти датчики).
2. Закрепляют инклинометр в термостабилизированном устройстве.
3. Устанавливают температуру внутри устройства - 20 ºС.
4. Устанавливают зенитный угол 90º.
5. Устанавливают угол наклона отклонителя 0º.
6. Устанавливают азимутальный угол в направлении на север, получая направление на север магнитометров α. Поворачивают азимутальный угол 180º, получая направление на север магнитометров α’. (в случае, если значение (α’-α) больше допустимой погрешности, то оси магнитометров расположены не ортогонально, необходимо произвести корректировку их положения).
7. Устанавливают зенитный угол вертикально вниз, получая направление в зенит акселерометров β. Поворачивают зенитный угол 180º, Получая направление в зенит акселерометров β'. (в случае, если значение (β’-β) больше допустимой погрешности, то оси акселерометров расположены не ортогонально, необходимо произвести корректировку их положения).
8. Устанавливают зенитный угол 1º.
9. Устанавливают угол наклона отклонителя 0º.
10. Выполняют вращение инклинометра внутри устройства в горизонтальной плоскости от 0 до 360º с остановками и записью данных каждые 30º.
11. Визуализирируют отсчеты магнитометров на графике. (По крайней мере по одному из магнитометров (или одной составляющей, если используется трехосевой магнитометр) графическое отображение должно быть эллиптического вида. Если это не так, то необходимо убедиться, что в рабочей области отсутствуют источники магнитного поля (металлические и магнитные предметы). Если предметы были, то удалить и продолжить калибровку заново с п. 8. Если нет, то требуется ремонт магнитометра).
12. Оценивают визуальное эллиптическое отображение показаний магнитометра. (если оно сжато/растянуто более чем в два раза относительно круга (большая ось А> 2а, где а – малая ось), то магнитометр закреплен в устройстве далеко от оси вращения и требуется его переустановка).
13. Повторяют операцию по п. 10 не менее 10 раз.
14. Поворачивают угол наклона отклонителя на 90º против часовой стрелки и повторяют операции по п.п. 10, 13.
15. Повторяют операцию п. 14. до тех пор, пока угол наклона отклонителя не станет равен 360º
16. Если зенитный угол меньше 10º или больше 170º, то устанавливают зенитный угол на 1º больше, иначе - устанавливают зенитный угол на 10º больше.
17. Выполняют операции по п. 9-10 и п. 13-16 до тех пор, пока зенитный угол не станет равен 179º включительно.
18. Повышают температуру внутри термостабилизированного устройства до следующего режима (40 ºС, 100 ºС, 170 ºС).
19. Выполняют операции п. 8-10 и п. 13-18 до тех пор, пока не будут получены измерения во всех температурных режимах.
20. Выполняют обработку данных, рассчитывают среднеквадратичные отклонения (СКО) показаний акселерометров и магнитометров для каждой координатно-температурной точки. Если в какой-либо координатно-температурной точке СКО превышает допустимые значения, то повторяют измерения в этой точке.
Заявляемый способ может быть реализован и позволяет путем выполнения многократных измерений настроить скважинный инклинометр, получить реальные поправочные коэффициенты (корреляционные зависимости) для различных режимов его эксплуатации и применять полученные при настройке базисные функции и поправочные коэффициенты непосредственно в процессе выполнении работ по измерениям наклонов скважины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСА УГЛОВЫХ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ БУРОВОГО ИНСТРУМЕНТА | 2015 |
|
RU2610957C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИНЫ | 2014 |
|
RU2567064C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СКВАЖИННОГО ПРИБОРА В БУРОВОЙ СКВАЖИНЕ | 2011 |
|
RU2482270C1 |
| БЕСКАРДАННЫЙ ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР И СПОСОБ ВЫРАБОТКИ ИНКЛИНОМЕТРИЧЕСКИХ УГЛОВ | 1994 |
|
RU2101487C1 |
| ИНКЛИНОМЕТР (ВАРИАНТЫ) | 1998 |
|
RU2134427C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ СКВАЖИН ГИРОСКОПИЧЕСКИМ ИНКЛИНОМЕТРОМ | 2008 |
|
RU2387828C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ МАГНИТНОЙ ДЕВИАЦИИ ИНКЛИНОМЕТРА | 2000 |
|
RU2186966C2 |
| КОМПЛЕКС ИНКЛИНОМЕТРИЧЕСКОЙ СКВАЖИННОЙ АППАРАТУРЫ И СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СКВАЖИН | 2000 |
|
RU2193654C2 |
| ВНУТРИСКВАЖИННАЯ КАЛИБРОВКА ИНСТРУМЕНТА ПРИ ПРОВЕДЕНИИ ИЗЫСКАНИЙ ПЛАСТОВ | 2009 |
|
RU2525564C2 |
Изобретение относится к измерительной технике – обработке и преобразованию данных с инклинометров, выполненных на основе трехосевых акселерометров и магнитометров, которые применяются в геофизических работах с применением технологии больших данных и машинного обучения. Способ калибровки инклинометра для определения пространственного положения нефтяных и газовых скважин заключается в том, что инклинометр калибруют, вращая внутри термостабилизированного устройства, фиксируя при каждом изменении его положения данные с акселерометров и магнитометров и преобразуя их в азимутальный, зенитный и апсидальный углы наклона. При этом вращение инклинометра производят во всем диапазоне измеряемых углов с одновременным изменением температуры внутри термостабилизированного устройства в диапазоне от - 20°С до 170°С, а определение корреляционных зависимостей результатов измерений каждого из трех углов наклона инклинометра от значений других углов производят для каждого значения температуры нагрева инклинометра и напряженности магнитного поля внутри устройства. На осях вращения устройства возможна установка поверенных средств измерений, а именно: на оси вращения азимутальных углов закрепление теодолита, а на осях вращения зенитных и апсидальных углов – оптического квадранта. Технический результат заключается в самокалибровке инклинометра, позволяющей в каждом случае определять истинное пространственное положение. 1 з.п. ф-лы, 2 ил.
1 Способ калибровки инклинометра для определения пространственного положения нефтяных и газовых скважин, заключающийся в том, что инклинометр калибруют, вращая внутри термостабилизированного устройства, фиксируя при каждом изменении его положения данные с акселерометров и магнитометров и преобразуя их в азимутальный, зенитный и апсидальный углы наклона, вращение инклинометра производят во всем диапазоне измеряемых углов с одновременным изменением температуры внутри устройства в диапазоне от -20 °С до 170 °С, а определение корреляционных зависимостей результатов измерений каждого из трех углов наклона инклинометра от значений других углов производят для каждого значения температуры нагрева инклинометра и напряженности магнитного поля внутри устройства.
2. Способ по п. 1, отличающийся тем, что на осях вращения устройства установлены поверенные средства измерений, а именно: на оси вращения азимутальных углов закреплен теодолит, а на осях вращения зенитных и апсидальных углов – оптический квадрант.
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ МАГНИТНОЙ ДЕВИАЦИИ ИНКЛИНОМЕТРА | 2000 |
|
RU2186966C2 |
| УСТАНОВКА ДЛЯ ГРАДУИРОВКИ И КАЛИБРОВКИ ИНКЛИНОМЕТРОВ | 2008 |
|
RU2364718C1 |
| КОМПЛЕКС ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ СКВАЖИННЫХ ИНКЛИНОМЕТРОВ | 2010 |
|
RU2439493C1 |
| CN 105840180 A, 10.08.2016. | |||

