Изобретение относится к области измерительного оборудования и касается контактного датчика положения, который может быть использован, например, во фрезерных станках и обрабатывающих центрах с числовым программным управлением (ЧПУ).
Известен контактный датчик положения, включающий хвостовик, соединенный с ним корпус со встроенной цветовой индикацией, содержащий устройство для определения положения контактирующего с исследуемой поверхностью элемента, блок для передачи информации с помощью радиосигнала, гальванический элемент, и находящийся вне корпуса контактирующий с исследуемой поверхностью элемент, выполненный в виде шарика (http://www.penntoolco.com/centroid-cnc-touch-probe-dp-4/).
Указанный датчик положения содержит признаки, совпадающие с существенными признаками предложенного технического решения, такие как наличие в датчике хвостовика, соединенного с корпусом, содержащим устройство для определения положения контактирующего с исследуемой поверхностью элемента, блок для передачи информации, гальванический элемент, и находящийся вне корпуса элемент, контактирующий с исследуемой поверхностью.
Известен контактный датчик положения, включающий хвостовик, соединенный с ним корпус с окном, содержащий устройство для определения положения контактирующего с исследуемой поверхностью элемента, блок для передачи информации с помощью радиосигнала, гальванический элемент, и находящийся вне корпуса контактирующий с исследуемой поверхностью элемент, выполненный в виде шарика (https://www.renishaw.m/m/omp400-high-acciiracy-niachine-probe--6089).
Указанный датчик положения содержит признаки, совпадающие с существенными признаками предложенного технического решения, такие как наличие в датчике хвостовика, соединенного с корпусом, содержащим устройство для определения положения контактирующего с исследуемой поверхностью элемента, блок для передачи информации, гальванический элемент, и находящийся вне корпуса элемент, контактирующий с исследуемой поверхностью.
Наиболее близким к заявляемому является известный контактный датчик положения, включающий хвостовик, соединенный с ним корпус, содержащий пьезоэлемент, устройство для определения положения контактирующего с исследуемой поверхностью элемента, блок для передачи информации, гальванический элемент, и находящийся вне корпуса элемент, контактирующий с исследуемой поверхностью (https://www.metrol.co.jp/download_f1le/pdf_data/catalog/en3s/RCK3E-E K008.pdf) - прототип. В данном техническом решении пьезоэлемент выполнен в виде стержня, контактирующий с исследуемой поверхностью элемент выполнен в виде металлического щупа (стилуса) с сапфировым шариком, закрепленного на конце металлической консоли, другим концом касающейся пьезоэлемента, а устройство для определения положения контактирующего с исследуемой поверхностью элемента представляет собой пьезоэлемент, деформация которого создает разность потенциалов на пьезоэлементе, по изменению которой можно определить положение контактирующего с исследуемой поверхностью элемента.
Данный контактный датчик положения содержит признаки, совпадающие с существенными признаками предложенного технического решения, такие как наличие в нем хвостовика, соединенного с корпусом, содержащим пьезоэлемент, устройства для определения положения контактирующего с исследуемой поверхностью элемента, гальванического элемента, и блока для передачи информации, а также наличие находящегося вне корпуса контактирующего с исследуемой поверхностью элемента.
Недостатками указанного датчика положения является его относительно невысокая чувствительность измерений по вертикальной оси Z, составляющая 1 мкм, и невозможность при его использовании осуществлять определение параметров шероховатости (Ra, Rz) исследуемой поверхности.
Техническая проблема изобретения заключается в разработке контактного датчика положения, лишенного вышеуказанных недостатков.
Технический результат изобретения состоит в повышении чувствительности измерений у контактного датчика положения.
Предварительно были проведены эксперименты с различными контактными датчиками положения, которые показали, что указанный технический результат достигается в том случае, когда у контактного датчика положения, включающего хвостовик, соединенный с ним корпус, содержащий пьезоэлемент, устройство для определения положения контактирующего с исследуемой поверхностью элемента, блок для передачи информации, гальванический элемент, и находящийся вне корпуса контактирующий с поверхностью элемент, 2-5% от длины пьезоэлемента, выполненного в виде трубки, закреплены в сквозном отверстии в не соединенной с хвостовиком торцевой поверхности корпуса, а незакрепленная часть пьезоэлемента расположена внутри того же отверстия в корпусе, датчик дополнительно содержит герметично соединенный с торцевой, не соединенной с хвостовиком, поверхностью корпуса кожух с возможностью изменения его высоты, и контактирующий с поверхностью элемент выполнен в виде съемного кантилевера, состоящего из основания и способной отражать оптическое излучение соединенной с ним консоли с зондом на незакрепленном ее конце, с возможностью фиксации основания кантилевера с помощью соединенного с незакрепленной поверхностью пьезоэлемента посадочного элемента, причем кантилевер находится внутри кожуха с возможностью контакта зонда с исследуемой поверхностью, и кожух в свободном состоянии выступает за габариты кантилевера, а в качестве устройства для определения положения контактирующего с исследуемой поверхностью элемента датчик содержит закрепленные внутри корпуса источник оптического излучения и фотодетектор, и не соединенная с хвостовиком торцевая поверхность корпуса содержит сквозное отверстие для падающего на консоль кантилевера оптического излучения и сквозное отверстие для подачи отраженного от консоли кантилевера оптического излучения на фотодетектор.
Предложенный контактный датчик положения является новым и не описан в патентной и научно-технической литературе.
Предлагаемый датчик положения может быть использован во фрезерных станках и обрабатывающих центрах с ЧПУ различного типа, например, таких как горизонтальный, вертикальный или комбинированный станок.
В данном техническом решении контактный датчик положения обязательно должен содержать такие конструктивные элементы, как соединенный с корпусом хвостовик, корпус, содержащий пьезоэлемент, устройство для определения положения контактирующего с исследуемой поверхностью элемента, блок для передачи информации, гальванический элемент, и находящийся вне корпуса контактирующий с поверхностью элемент. Если в предложенном устройстве будет отсутствовать хотя бы один из вышеуказанных конструктивных элементов, то датчик положения окажется неработоспособным.
Содержащийся в предложенном контактном датчике хвостовик необходим для закрепления датчика на используемом обрабатывающем станке, причем хвостовик обязательно должен быть соединен с корпусом датчика. При этом соединение хвостовика с корпусом может быть осуществлено различными способами, например, путем резьбового соединения, склеивания, пайки, и т.д.
В предлагаемом устройстве, в зависимости от конкретной решаемой задачи и типа оборудования, геометрические размеры хвостовика, его форма и материал из которого он может быть изготовлен, могут быть различны. Например, хвостовик может быть изготовлен из нержавеющей стали, инструментальной стали, бронзы, и т.д.
В предложенном техническом решении датчик содержит полый корпус, геометрические размеры и форма которого, а также материалы, из которых он может быть изготовлен, в зависимости от конкретной решаемой задачи и типа оборудования, могут быть различны. При изготовлении корпуса могут быть использованы, например, алюминий, латунь, капролон и т.д. При этом не соединенная с хвостовиком торцевая поверхность корпуса, расположенная перпендикулярно к оси хвостовика, должна иметь толщину не менее длины пьезотрубки и содержать сквозное отверстие для закрепления в нем 2-5% от длины пьезоэлемента и прохождения через нее подключенных к нему проводов. Диаметр сквозного отверстия в торце корпуса может быть различен и составлять, например, 8-22 мм.
Следует отметить, что прототип и предложенный контактный датчик положения содержат пьезоэлемент, который в прототипе используют для преобразования механического воздействия контактирующего с поверхностью элемента (сапфирового шарика) в электрический сигнал на пьезоэлементе, по изменению которого определяют местоположение контактирующего элемента на исследуемой поверхности. В предложенном техническом решении пьезоэлемент используют для других целей, а именно для точного подвода контактирующего с поверхностью элемента - кантилевера к исследуемой поверхности. При этом в рабочем положении часть пьезотрубки с кантилевером может выступать за пределы торца корпуса датчика.
В предлагаемом контактном датчике положения, в отличие от прототипа, пьезоэлемент выполнен в виде трубки. Использование пьезоэлемента в виде трубки, а не, например, монолитного стержня, обусловлено тем, что внутри трубки закреплен один из электродов, а другие, например, 3 или 4 электрода закреплены на внешней поверхности пьезотрубки для осуществления изменения размеров трубки параллельно ее осевой линии при подаче на пьезоэлемент электрического напряжения, что позволяет точно подводить зонд кантилевера к исследуемой поверхности. В предложенном техническом решении контур поперечного сечения трубки может быть различным и представлять собою, например, круг, эллипс, квадрат и т.д. При этом геометрические размеры трубки также могут быть различны, и трубка может быть изготовлена из пьезокерамики различных марок, например, из ЦТС-19, ЦТС-21, PZT-5 и т.д. При этом целесообразно во избежание перекоса пьезотрубки при подаче на нее напряжения использовать трубки, у которых торцевые срезы перпендикулярны осевой линии трубки. При использовании цилиндрических трубок их длина может достигать, например, 20-100 мм, наружный диаметр трубок может составлять, например, 6-20 мм, а толщина стенки трубки может быть равна, например, 0,2-2,0 мм. Экспериментально было показано, что для получения максимальной чувствительности измерений у предложенного контактного датчика положения 2-5% от длины пьезоэлемента (пьезотрубки) должны быть закреплены (жестко соединены) в отверстии в несоединенной с хвостовиком торцевой поверхности корпуса, а незакрепленная часть пьезоэлемента должна быть расположена внутри того же отверстия. Если пьезоэлемент будет закреплен не в указанном отверстии в корпусе датчика а, например, на внешней торцевой поверхности корпуса, то чувствительность измерений у датчика положения снижается. Чувствительность также снижается, если в отверстии корпуса будет закреплено менее 2% от длины пьезотрубки или более 5% от ее длины. Достичь закрепления вышеуказанных 2-5% от длины пьезотрубки можно, например, путем установки в отверстие корпуса втулки, представляющей собой ступенчатое тело вращения (любой детали, изготавливаемой методом токарной обработки) без закрытых уступов с буртиком и двумя выступами со сквозным отверстием на оси вращения, центрирующегося со сквозным ступенчатым отверстием в корпусе датчика посредством выступа, и соединения вышеописанного тела с корпусом датчика при помощи, например, клея, герметика и т.д. Центрирование вышеуказанного тела вращения с пьезолементом может быть осуществлено с помощью второго выступа, обеспечивающего возможность закрепления фиксированной длины пьезоэлемента, лежащей в интервале 2-5% от длины пьезоэлемента. Закрепление необходимой части пьезоэлемента в теле вращения может быть осуществлено, например, с использованием герметика, клея и т.д. Также для закрепления требуемой части пьезоэлемента в отверстии корпуса могут быть использованы, например, установочные винты. При их использовании сквозное отверстие в корпусе датчика может не быть ступенчатым.
В данном техническом решении, в отличие от прототипа, устройство для определения положения контактирующего с исследуемой поверхностью элемента выполнено в виде комбинации (сочетания) источника оптического излучения, направляющего луч света на часть консоли кантилевера, расположенную вблизи зонда кантилевера и способную отражать падающий на нее луч света, и фотодетектора, регистрирующего отраженное от консоли оптическое излучения. При обработке полученной информации можно с высокой точностью сделать вывод о рельефе исследуемой поверхности и месте нахождения кантилевера, что повышает чувствительность измерения датчика. При этом можно использовать различные источники оптического излучения, например, такие как лазер, светодиод, галогеновая лампа со щелью и т.д. В предлагаемом датчике фотодетекторы также могут быть различны.
В предлагаемом контактном датчике положения можно использовать блоки для передачи информации различного типа, передающие информацию, например, по радиоканалу или по интернету, на находящийся вне датчика блок управления, а также принимающий с блока команды и приводящий их в исполнение. При этом блок для передачи информации должен обязательно находиться и быть закреплен внутри корпуса датчика, что позволяет компактно расположить все исполнительные части устройства в одном приборе и защитить электронную часть датчика от внешних воздействий.
Датчик положения содержит в качестве источника питания, по крайней мере, один закрепленный внутри корпуса, заменяемый гальванический элемент, тип которого может быть различен, и представлять собою, например, батарейку или аккумулятор. Датчик также содержит внутри корпуса провода, которые формируют силовые и сигнальные линии.
В предлагаемом техническом решении, в отличие от прототипа, контактирующий с поверхностью элемент выполнен в виде находящегося внутри кожуха съемного кантилевера, традиционно состоящего из основания кантилевера, соединенной с ним консоли и зонда на незакрепленной части консоли. При этом геометрические размеры кантилевера и материалы, из которых он может быть изготовлен, могут быть различны. Например, длина консоли кантилевера может составлять 0,005-0,04 мм и размер плоского основания может достигать, например, 2×3-4×5 мм. Кантилевер может быть изготовлен, например, из кремния, нитрида кремния, металла, такого как золото или алюминий, и т.д.
Использование съемного кантилевера дает возможность в процессе работы заменять один кантилевер на другой в зависимости от потребностей (износ, поломка кантилевера) или конкретной решаемой задачи.
В предлагаемом контактном датчике положения для закрепления основания кантилевера используют жестко закрепленный на свободном конце пьезотрубки посадочный элемент, позволяющий при необходимости заменять один кантилевер на другой. Посадочный элемент может быть выполнен, например, в виде упругой прижимной пластины или прижимной замкнутой или незамкнутой рамки, дающих возможность при подведении основания кантилевера под вышеуказанный посадочный элемент за счет силы трения и/или прижима зафиксировать основание кантилевера на пьезотрубке. Также можно использовать жестко закрепленный на пьезотрубке посадочный элемент, выполненный в виде П-образной пластины, по крайней мере, с одним фиксирующим (направляющим) пазом на ее внутренней поверхности с обеспечением возможности контакта зонда кантилевера с исследуемой поверхностью. При этом высота паза должна быть не менее толщины основания кантилевера. Посадочный элемент на пьезотрубке также может быть закреплен как на незакрепленной торцевой поверхности пьезоэлемента, и/или на незакрепленных торцевой и боковой поверхностях пьезоэлемента по типу зубной коронки. Геометрические размеры посадочного элемента и материалы, из которого он может быть изготовлен, могут варьироваться в зависимости от конкретной решаемой задачи. При этом размеры посадочного элемента должны давать возможность закрепления основания съемного кантилевера вне отверстия в корпусе датчика для обеспечения возможности замены одного кантилевера на другой.
Предлагаемый контактный датчик положения по сравнению с прототипом дополнительно содержит кожух с возможностью изменения его высоты, герметично соединенный с торцевой поверхностью корпуса датчика, не соединенной с хвостовиком. Наличие такого конструктивного элемента позволяет повысить срок службы заменяемой части предлагаемого устройства - кантилевера и повышает помехоустойчивость датчика. Если вышеописанный кожух не будет герметично соединен с торцевой поверхностью корпуса, то это при сканировании исследуемой поверхности неизбежно приведет к снижению чувствительности измерений у датчика. Возможность изменения высоты кожуха необходима для защиты сканирующего элемента датчика кантилевера от внешних воздействий и может быть достигнута путем использования при его изготовлении эластичных материалов, например, таких как силиконовая резина, фторопластовая гофрированная трубка и т.д. Герметичное соединение кожуха с торцом корпуса может быть осуществлено, например, путем склеивания. При этом форма и геометрические размеры кожуха могут быть различны: его внешний диаметр может составлять, например, 10-25 мм, а высота кожуха в нерабочем состоянии может быть равна, например, 5-20 мм. Однако, при этом, кантилевер должен находиться вне корпуса датчика, но внутри кожуха.
В предлагаемом техническом решении, так же, как и в прототипе, контактирующий с поверхностью элемент должен находиться вне корпуса датчика для обеспечения возможности сканирования им поверхности исследуемого объекта. В противном случае датчик становится неработоспособным.
При этом использованный в датчике фотодетектор обладает светоулавливающей площадкой, разделенной, например, на 4 сегмента. При попадании оптического излучения на сегменты возникает электрический сигнал, который обрабатывается блоком передачи информации. Два выполненных в корпусе датчика сквозных отверстия служат каналами для прохождения оптического излучения. Испускаемое источником оптическое излучение проходит через одно сквозное отверстие, отражается от консоли кантилевера, проходит через второе сквозное отверстие и попадает на площадку фотодетектора.
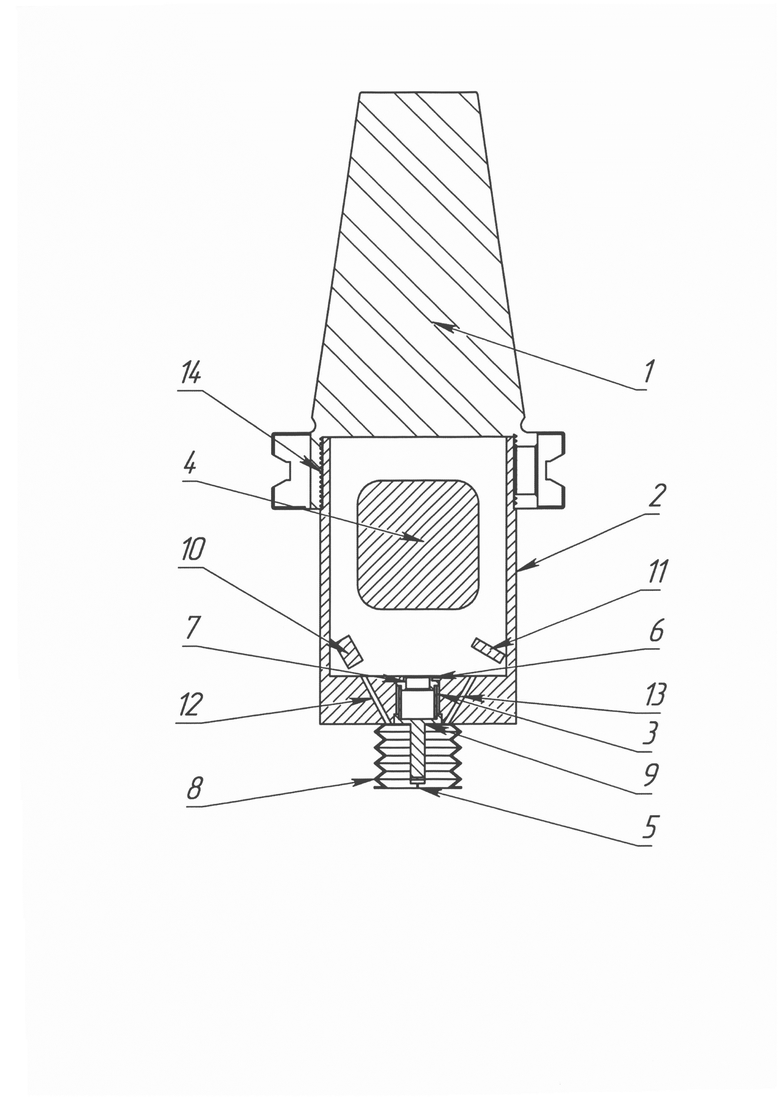
Схематическое изображение сечения предложенного контактного датчика положения в рабочем состоянии, описанного в примере 2, показано на Фиг., на которой цифрой 1 обозначен конусообразный хвостовик, цифрой 2 обозначен полый корпус, цифрой 3 обозначен пьезоэлемент, цифрой 4 обозначен блок для передачи информации. Цифрой 5 обозначен контактирующий с исследуемой поверхностью элемент - зонд кантилевера, цифрой 6 обозначено ступенчатое отверстие в торцевой поверхности корпуса, используемое для частного случая закрепления пьезотрубки в отверстии с помощью втулки, обозначенной цифрой 7. Цифрой 8 обозначен кожух. На Фиг. цифрой 9 обозначен посадочный элемент для основания кантилевера, закрепленный на боковой поверхности и торце пьезотрубки по типу зубной коронки. Цифрой 10 обозначен источник оптического излучения, цифрой 11 обозначен фотодетектор, цифрой 12 обозначено сквозное отверстие в корпусе для прохождения падающего на консоль кантилевера оптического излучения, цифрой 13 обозначено сквозное отверстие в корпусе для прохождения отраженного от консоли оптического излучения на фото детектор.
У смонтированного контактного датчика положения хвостовик соединен с полым корпусом с использованием резьбового соединения, обозначенного на Фиг. цифрой 14. Гальванический элемент и сигнальные и силовые электрические линии на Фиг. не приведены.
Сборку предлагаемого контактного датчика положения осуществляют следующим образом:
Одну торцевую поверхность пьезотрубки соединяют методом склеивания с посадочным элементом, с помощью которого на торце пьезоэлемента закрепляют съемный кантилевер.
Внутри пьезотрубки, например, с помощью электропроводящего клея или припоя, жестко закрепляют отдельный электрод. Остальные, например, 3 или 4 электрода аналогично закрепляют в разных местах на боковой поверхности пьезотрубки. С помощью силовых линий (проводов) каждый из электродов соединяют с блоком для передачи информации.
После этого другой (свободный) конец пьезотрубки фиксируют в отверстии в не соединенном с хвостовиком торце корпуса таким образом, чтобы 2-5% длины пьезотрубки были жестко закреплены в сквозном отверстии корпуса датчика. Для этого используют один из вышеописанных способов фиксации.
В полости корпуса датчика закрепляют (монтируют) блок для передачи информации, гальванический элемент, источник оптического излучения и фотодетектор. 2 последних конструктивных элемента датчика располагают таким образом, чтобы оптическое излучение от источника проходило через сквозное отверстие в торце корпуса и попадало на консоль кантилевера, и отраженный от консоли оптическое излучение проходило через другое сквозное отверстие в торце корпуса и попадало на расположенный внутри корпуса фотодетектор.
Управляющие провода от пьезотрубки, источника оптического излучения и фото детектора подводят к блоку для передачи информации.
Собранный корпус датчика закрепляют в хвостовике, например, с помощью резьбового соединения или другими способами, после чего с внешней торцевой поверхностью корпуса с помощью герметика или клея соединяют кожух таким образом, чтобы кантилевер оказался внутри кожуха, и кожух в свободном (нерабочем) состоянии выступал за габариты зонда кантилевера. После этого предлагаемый датчик считают собранным.
Предлагаемый контактный датчик положения функционирует следующим образом.
На первом этапе выбирают в качестве исследуемой поверхности плоский образец оксида кремния (SiO2) с нанесенным литографическим рисунком. При подводе датчика положения к образцу возможно различить рельеф поверхности, размеры которого известны заранее. Далее проводят калибровку напряжения сигнала, полученного с фотодетектора, относительно размеров рельефа, измеренного датчиком положения.
Чувствительность измерений при использовании предложенного контактного датчика положения определяют следующим образом. Датчик закрепляют в центре ЧПУ. На плоскую поверхность, перпендикулярную оси датчика, устанавливают пьезокерамическую пластину с заранее известными характеристиками изменения толщины пластины в зависимости от приложенного к ней напряжения (измерительная мера перемещений). Кантилевер, закрепленный в датчике положения, подводят к пьезокерамической пластине при различных значениях поданного на пластину напряжении. Проводя зависимость между сигналами электрического напряжения (V), полученными с фотодетектора при разной толщине (Н) пьезокерамической пластины при разном поданном на нее напряжении, находят зависимость V от Н и тем самым осуществляют калибровку датчика положения. Точность измерения датчика после калибровки определяют многократным повторением касания пластины при одинаково поданном на нее напряжении и таким образом вычисляют погрешность измерения высоты пластины.
Определение параметров шероховатости поверхности с помощью предлагаемого датчика проводят следующим образом. Кантилевер при исследовании поверхности движется вверх и вниз, обходя неровности поверхности. Отраженное оптическое излучение поступает на площадку фотодетектора. При этом, попадая на разные зоны площадки фотодетектора, сигнал меняется. С помощью фотодетектора определяют разность сигналов и отклонения кантилевера от средней линии, таким образом определяется шероховатость поверхности.
Преимущества предложенного контактного датчика положения подтверждают следующие примеры.
Пример 1:
В примере используют контактный датчик положения, включающий выполненный из нержавеющей стали марки 316L хвостовик в форме усеченного конуса, соединенного через резьбу с полым, выполненным из алюминиевого сплава, корпусом цилиндрической формы. Хвостовик имеет международный стандарт конструктивной разновидности для автоматизированной смены инструмента ISO 7388 и типоразмер 30. Внешний диаметр корпуса составляет 45,0 мм, внутренний диаметр равен 40,0 мм. Торцевая часть корпуса, не соединенная с хвостовиком, имеет стенку толщиной 30,0 мм и сквозное отверстие с уступом на оси хвостовика диаметром 12,0 мм. Датчик содержит цилиндрическую пьезотрубку, изготовленную из пьезокерамики марки ЦТС-19, длиной 20,0 мм с внешним диаметром 6,0 мм и толщиной стенки 0,2 мм, у которой верхнее и нижнее основания перпендикулярны оси вращения цилиндра. 0,4 мм пьезотрубки (2% от длины) с помощью вышеописанной втулки с буртиком и с двумя выступами и сквозным отверстием на оси вращения диаметром 5 мм с помощью клея жестко закреплены внутри сквозного отверстия, ведущего внутрь корпуса. Остальная часть трубки находится внутри отверстия в корпусе датчика.
У датчика на незакрепленном торце пьезотрубки с помощью клея зафиксирован посадочный элемент из алюминиевого сплава, выполненный в виде прижимной пластины прямоугольной формы размерами 3×6×0,4 мм, под которую подведено изготовленное из SiO2 основание кантилевера прямоугольной формы с размерами 1,5×3,5 мм2, имеющее толщину основания 0,5 мм. Кантилевер имеет соединенную с его основанием консоль длиной 0,4 мм, одна из поверхностей которой отполирована и способна отражать направленный на нее свет. На незакрепленном конце консоли кантилевер содержит зонд пирамидальной формы, используемый для тестирования исследуемой поверхности.
Внешняя торцевая поверхность корпуса с помощью клея герметично соединена с изготовленным из силиконовой резины защитным кожухом в форме трубки длиной 15,0 мм, внешний диаметр которой равен 20,0 мм, с толщиной стенки 0,4 мм, что дает возможность изменять высоту защитного кожуха в процессе контакта датчика с исследуемой поверхностью.
Не соединенная с конусом торцевая поверхность корпуса содержит направленное под утлом к оси конуса сквозное отверстие диаметром 4,0 мм для падающего на кантилевер излучения от закрепленного в корпусе источника оптического излучения - лазера модели LDM-4V-650-3-PA(Laserex, Австралия) и направленное под углом к оси конуса сквозное отверстие диаметром 5,0 мм для прохождения отраженного от полированной поверхности консоли кантилевера лазерного света и его подачи на расположенный внутри корпуса закрепленный фотодетектор марки Si PIN Photodiode S4349 (Hamamatsu, Япония). В корпусе также находятся блок для передачи информации с фотодетектора на находящийся вне датчика блок управления. К пьезоэлементу подведены 5 электродов для подачи питания от расположенного внутри датчика гальванического элемента через блок передачи информации, один из которых закреплен внутри пьезотрубки, а другие закреплены на наружной боковой поверхности пьезотрубки. Также внутри корпуса находятся медные провода для подачи напряжения от гальванического элемента на лазер и передачи сигнала с фотодетектора на блок для передачи информации.
На фрезерном центре марки HAAS модели VF2 проводят обработку изделия из алюминиевого сплава Д16Т. После завершения цикла резания прокалиброванный заранее датчик касания устанавливают в шпиндель станка и проводят подвод датчика на расстояние 0,05 мм от поверхности изделия. При этом используют оптическую систему связи, включающую источник оптического излучения и фотодетектор. Затем осуществляют точный подвод кантилевера путем подачи стабилизированного напряжения на пьезотрубку датчика. При этом защитный кожух, выступающий в свободном состоянии за габариты кантилевера, плотно прилегает к исследуемой поверхности сплава, таким образом, осуществляя защиту от внешних воздействий на зонд кантилевера. При касании зонда кантилевера обработанной поверхности световое пятно от отраженного от консоли лазерного света, позиционируемого по центру фотодетектора, смещается, тем самым, определяя величину смещения консоли кантилевера относительно своего свободного состояния. Чувствительность контактного датчика положения составляет 1 нм.
Определение параметров шероховатости осуществляют путем линейного перемещения датчика касания в контакте с обработанной поверхностью и обработкой сигнала с фотодетектора.
Параметры шероховатости поверхности изделия Ra и Rz равны 10 нм и 50 нм, соответственно.
Пример 2
В примере используют контактный датчик положения, выполненный из инструментальной стали, у которого хвостовик выполнен в форме усеченного конуса и соединен через резьбу с полым корпусом цилиндрической формы, имеющим внешний диаметр 50,0 мм и внутренний диаметр 45,0 мм. Торцевая часть корпуса, не соединенная с хвостовиком, имеет толщину 108,0 мм и сквозное отверстие с уступом на оси хвостовика диаметром 22,0 мм. Датчик содержит цилиндрическую пьезотрубку, изготовленную из пьезокерамики марки ЦТС-21, длиной 100,0 мм с внешним диаметром 20,0 мм и толщиной стенки 2,0 мм, у которой верхнее и нижнее основание перпендикулярно оси вращения цилиндра. 5,0 мм пьезотрубки (5% от ее длины) жестко закреплены аналогично примеру 1 внутри сквозного отверстия не соединенной с хвостовиком торцевой части корпуса. Незакрепленная часть пьезотрубки находится внутри отверстия в корпусе датчика. На незакрепленном торце пьезотрубки и ее боковой поверхности по типу зубной коронки зафиксирован посадочный элемент, содержащий прижимную рамку размером 4×5 мм2, имеющую внутри прямоугольное отверстие размером 3×4 мм2 и разрез в периметре рамки длиной 1,0 мм. Под рамку подведено изготовленное из нитрида кремния основание кантилевера прямоугольной формы с размерами 4×5 мм2 и толщиной 0,5 мм. Кантилевер имеет соединенную с его основанием консоль длиной 0,05 мм, одна из поверхностей которой отполирована и способна отражать направленный на нее свет. На незакрепленном конце консоли кантилевер имеет зонд пирамидальной формы, используемый для тестирования исследуемой поверхности.
Внешняя торцевая поверхность корпуса с помощью клея герметично соединена с изготовленным из гофрированной фторопластовой трубки защитным кожухом в форме трубки длиной 5,0 мм, внешний диаметр которой равен 25,0 мм, с толщиной стенки 0,5 мм, что дает возможность изменять высоту защитного кожуха в процессе контакта датчика с исследуемой поверхностью.
Не соединенная с конусом торцевая поверхность корпуса содержит направленное под углом к оси инструментального конуса сквозное отверстие диаметром 5,0 мм для падающего на кантилевер излучения от закрепленного в корпусе источника оптического излучения - фотодиод марки ФД-125К(000 «ЗАПАДПРИБОР», Россия) и направленное под углом к оси конуса сквозное отверстие диаметром 6,0 мм для прохождения отраженного от полированной поверхности консоли кантилевера света и его подачи на расположенный внутри корпуса закрепленный фотодетектор марки PDQ80A (Thorlabs, США). В корпусе также находятся блок для передачи информации с фотодетектора на находящийся вне датчика блок управления. К пьезоэлементу подведены 4 электрода для подачи питания от расположенного внутри датчика блока передачи информации, один из которых закреплен внутри пьезотрубки, а другие закреплены на наружной боковой поверхности пьезотрубки. Также внутри корпуса находятся медные провода для подачи напряжения от гальванического элемента на фотодиод и передачи сигнала с фотодетектора на блок для передачи информации.
Схематическое изображение используемого в примере датчика ранее было показано на Фиг.
На фрезерном станке с ЧПУ модели Hurco VMX24 проводят обработку изделия из стали. После завершения цикла резания прокалиброванный заранее датчик касания устанавливают в шпиндель станка и проводят подвод датчика на расстояние 0,04 мм от поверхности изделия. При этом используют оптическую систему связи, включающую источник оптического излучения и фотодетектор. Затем осуществляют точный подвод кантилевера путем подачи стабилизированного напряжения на пьезотрубку датчика. При этом защитный кожух, выступающий в свободном состоянии за габариты зонда кантилевера, плотно прилегает к исследуемой поверхности стали, таким образом осуществляя защиту от внешних воздействий на зонд. При касании зонда кантилевера обработанной поверхности стали световое пятно от отраженного от консоли света, позиционируемого по центру фотодетектора, смещается, тем самым, определяя величину смещения консоли кантилевера относительно своего свободного состояния. Чувствительность контактного датчика положения составляет 1 нм.
Определение параметров шероховатости осуществляют путем линейного перемещения датчика касания в контакте с обработанной поверхностью и обработкой сигнала с фотодетектора. Параметры шероховатости поверхности изделия Ra и Rz равны 10 нм и 20 нм, соответственно.
Пример 3
В примере используют контактный датчик положения, выполненный из бронзы, у которого хвостовик выполнен в форме цилиндра диаметром 22,0 мм и соединен через резьбу с полым корпусом цилиндрической формы, имеющим внешний диаметр 48,0 мм и внутренний диаметр 43,0 мм. Не соединенная с хвостовиком торцевая часть корпуса имеет стенку толщиной 50,0 мм и сквозное отверстие на оси вращения хвостовика диаметром 15,0 мм. Датчик содержит цилиндрическую пьезотрубку, изготовленную из пьезокерамики марки PZT-5 длиной 40,0 мм с наружным диаметром 10,0 мм и толщиной стенки 1,0 мм, у которой верхнее и нижнее основание перпендикулярно оси вращения цилиндра. 1,2 мм пьезотрубки (3% от ее длины) жестко закреплены с помощью двух установочных винтов внутри сквозного отверстия в торцевой части корпуса, не соединенной с хвостовиком. Незакрепленная часть пьезотрубки находится внутри сквозного отверстия внутри корпуса датчика. На торцевой части пьезотрубки с помощью клея закреплен посадочный элемент П-образной формы, содержащий на двух его плоскостях, расположенных на расстоянии 3,0 мм друг от друга, по одинаковому пазу высотой 1,0 мм, и глубиной 1,0 мм параллельному плоскости торцевой поверхности трубки, для размещения в элементе основания кантилевера, имеющего размеры 3×4,6 мм2 и толщину основания 0,8 мм.
Кантилевер имеет соединенную с его основанием консоль длиной 0,025 мм, одна из поверхностей которой отполирована и способна отражать направленный на нее свет. На незакрепленном конце консоли расположен зонд пирамидальной формы, используемый для тестирования исследуемой поверхности.
Внешняя торцевая поверхность корпуса с помощью клея герметично соединена с изготовленным из силиконовой резины защитным кожухом в форме трубки длиной 20,0 мм, внешний диаметр которой равен 25,0 мм, с толщиной стенки 0,5 мм, что дает возможность изменять высоту защитного кожуха в процессе контакта датчика с исследуемой поверхностью.
Не соединенная с конусом торцевая поверхность корпуса содержит направленное под углом к оси конуса сквозное отверстие диаметром 4,0 мм для падающего на кантилевер излучения от закрепленного в корпусе источника оптического излучения - лазера модели DSL6505-921(Changshu Desheng Optics Electronics Co., LTD, КНР) и направленное под углом к оси конуса сквозное отверстие диаметром 5,0 мм для прохождения отраженного от полированной поверхности консоли кантилевера лазерного света и его подачи на расположенный внутри корпуса закрепленный фотодетектор марки ФД-19КК (АО «Московский завод «Сапфир», Россия).
В корпусе также находятся блок для передачи информации с фото детектора на находящийся вне датчика блок управления. К пьезоэлементу подведены 5 электродов для подачи питания от расположенного внутри датчика блока передачи информации, один из которых закреплен внутри пьезотрубки, а другие закреплены на наружной боковой поверхности пьезотрубки. Также внутри корпуса находятся медные провода для подачи напряжения от гальванического элемента на лазер и передачи сигнала с фотодетектора на блок для передачи информации.
На фрезерном станке с ЧПУ марки Fanuc проводят обработку изделия из стали. После завершения цикла резания прокалиброванный заранее датчик касания устанавливают в шпиндель станка и проводят подвод датчика на расстояние 0,04 мм от поверхности изделия. При этом используют оптическую систему связи, включающую источник оптического излучения и фотодетектор. Затем осуществляют точный подвод кантилевера путем подачи стабилизированного напряжения на пьезотрубку датчика. При этом защитный кожух, выступающий в свободном состоянии за габариты зонда кантилевера, плотно прилегает к исследуемой поверхности стали, таким образом, осуществляя защиту от внешних воздействий на зонд. При касании зонда кантилевера обработанной поверхности стали световое пятно от отраженного от консоли лазерного света, позиционируемого по центру фотодетектора, смещается, тем самым, определяя величину смещения консоли кантилевера относительно своего свободного состояния. Чувствительность контактного датчика положения составляет 1 нм. Определение параметров шероховатости осуществляют путем линейного перемещения датчика касания в контакте с обработанной поверхностью и обработкой сигнала с фотодетектора.
Параметры шероховатости поверхности изделия Ra и Rz равны 1 нм и 5 нм, соответственно.
Таким образом, из приведенных примеров видно, что предложенный контактный датчик положения действительно повышает чувствительность измерений по вертикальной оси с 1 мкм у прототипа до 1 нм у датчика, а также дает возможность определять параметры шероховатости исследуемой поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С СИСТЕМОЙ АВТОМАТИЧЕСКОГО СЛЕЖЕНИЯ ЗА КАНТИЛЕВЕРОМ | 2002 |
|
RU2227333C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2005 |
|
RU2282257C1 |
| Устройство для контроля плотности вязких и невязких жидких сред в вертикальных каналах или скважинах при помощи гидростатического контактного плотномера с оптической передачей сигналов и способ контроля плотности | 2019 |
|
RU2742022C1 |
| МНОГОЗОНДОВЫЙ ДАТЧИК КОНТУРНОГО ТИПА ДЛЯ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2003 |
|
RU2244256C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ | 2011 |
|
RU2479063C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2008 |
|
RU2389032C2 |
| МНОГОЗОНДОВЫЙ МОДУЛЬ ДЛЯ СКАНИРУЮЩЕГО МИКРОСКОПА | 2006 |
|
RU2306524C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ АПЕРТУРНЫХ ЗОНДОВ ДЛЯ БЛИЖНЕПОЛЬНОЙ ОПТИЧЕСКОЙ МИКРОСКОПИИ | 2022 |
|
RU2784686C1 |
| СПОСОБ СКАНИРОВАНИЯ ОБЪЕКТОВ С ПОМОЩЬЮ СКАНИРУЮЩЕГО ЗОНДОВОГО МИКРОСКОПА | 2004 |
|
RU2282902C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ И ИССЛЕДОВАНИЯ ПОВЕРХНОСТИ ВНУТРИ ЯДЕРНЫХ И ТЕРМОЯДЕРНЫХ УСТАНОВОК | 2000 |
|
RU2169954C1 |
Изобретение относится к области измерительного оборудования и касается контактного датчика положения, который может быть использован, например, во фрезерных станках и обрабатывающих центрах с числовым программным управлением. Контактный датчик положения включает хвостовик, соединенный с ним корпус, содержащий пьезоэлемент, устройство для определения положения контактирующего с исследуемой поверхностью элемента, блок для передачи информации, гальванический элемент, и находящийся вне корпуса контактирующий с поверхностью элемент, 2-5% от длины пьезоэлемента, выполненного в виде трубки, закреплены в сквозном отверстии в не соединенной с хвостовиком торцевой поверхности корпуса, а незакрепленная часть пьезоэлемента расположена внутри того же отверстия в корпусе. Датчик дополнительно содержит герметично соединенный с торцевой, не соединенной с хвостовиком, поверхностью корпуса кожух с возможностью изменения его высоты, и контактирующий с поверхностью элемент выполнен в виде съемного кантилевера, состоящего из основания и способной отражать оптическое излучение соединенной с ним консоли с зондом на незакрепленном ее конце, с возможностью фиксации основания кантилевера с помощью соединенного с незакрепленной поверхностью пьезоэлемента посадочного элемента. Причем кантилевер находится внутри кожуха с возможностью контакта зонда с исследуемой поверхностью, и кожух в свободном состоянии выступает за габариты кантилевера, а в качестве устройства для определения положения контактирующего с исследуемой поверхностью элемента датчик содержит закрепленные внутри корпуса источник оптического излучения и фотодетектор, и не соединенная с хвостовиком торцевая поверхность корпуса содержит сквозное отверстие для падающего на консоль кантилевера оптического излучения и сквозное отверстие для подачи отраженного от консоли кантилевера оптического излучения на фотодетектор. Технический результат - повышение чувствительности измерений по вертикальной оси до 1 нм у датчика. 1 ил.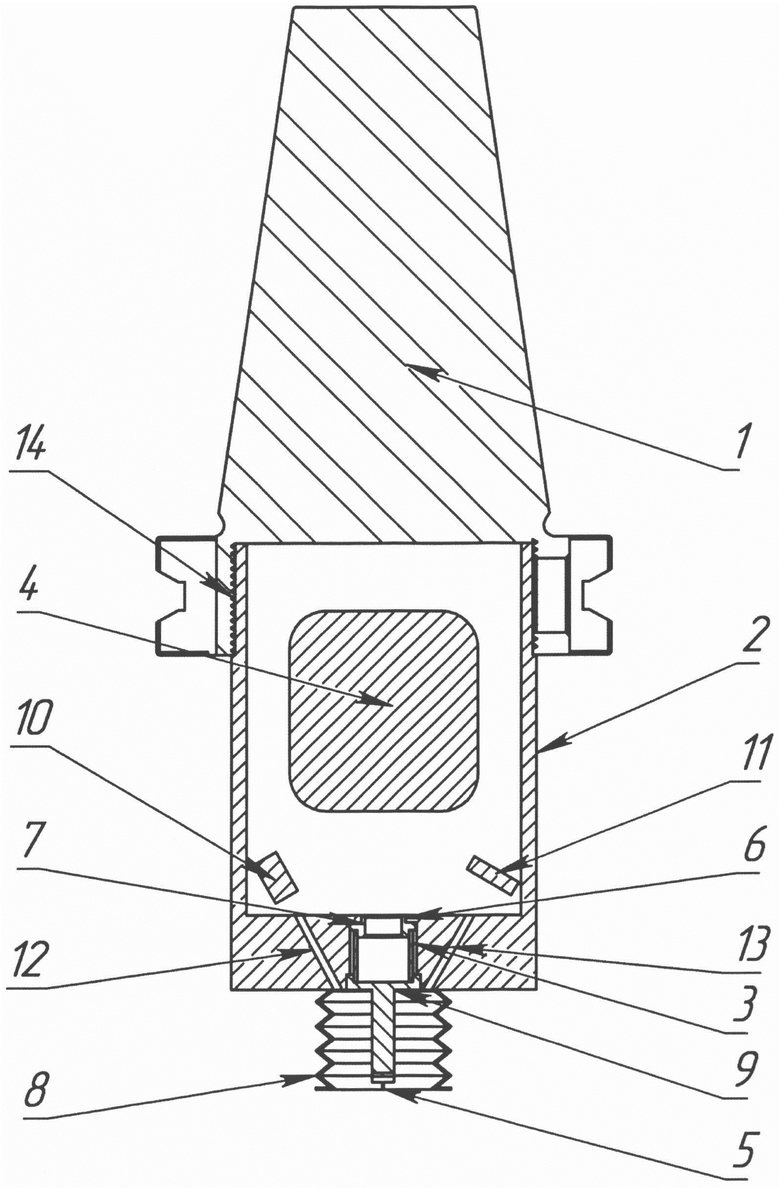
Контактный датчик положения, включающий хвостовик, соединенный с ним корпус, содержащий пьезоэлемент, устройство для определения положения контактирующего с исследуемой поверхностью элемента, блок для передачи информации и гальванический элемент, и находящийся вне корпуса контактирующий с поверхностью элемент, отличающийся тем, что 2-5% от длины пьезоэлемента, выполненного в виде трубки, закреплены в сквозном отверстии в не соединенной с хвостовиком торцевой поверхности корпуса, а незакрепленная часть пьезоэлемента расположена внутри того же отверстия в корпусе, датчик дополнительно содержит герметично соединенный с торцевой, не соединенной с хвостовиком, поверхностью корпуса кожух с возможностью изменения его высоты и контактирующий с поверхностью элемент выполнен в виде съемного кантилевера, состоящего из основания и способной отражать оптическое излучение соединенной с ним консоли с зондом на незакрепленном ее конце, с возможностью фиксации основания кантилевера с помощью соединенного с незакрепленной поверхностью пьезоэлемента посадочного элемента, причем кантилевер находится внутри кожуха с возможностью контакта зонда кантилевера с исследуемой поверхностью, и кожух в свободном состоянии выступает за габариты кантилевера, а в качестве устройства для определения положения контактирующего с исследуемой поверхностью элемента датчик содержит закрепленные внутри корпуса источник оптического излучения и фотодетектор, и не соединенная с хвостовиком торцевая поверхность корпуса содержит сквозное отверстие для падающего на консоль кантилевера оптического излучения и сквозное отверстие для подачи отраженного от консоли кантилевера оптического излучения на фотодетектор.
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2003 |
|
RU2334214C2 |
| ШАГАЮЩИЙ РОБОТ-НАНОПОЗИЦИОНЕР И СПОСОБ УПРАВЛЕНИЯ ЕГО ПЕРЕДВИЖЕНИЕМ | 2010 |
|
RU2540283C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ ДЕТАЛИ | 2011 |
|
RU2485441C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ОБЪЕКТОВ ИЗ ТВЁРДЫХ МАТЕРИАЛОВ, УЛЬТРАЗВУКОВОЙ ВЫСОКОЧАСТОТНЫЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) И АНТЕННАЯ РЕШЁТКА С ПРИМЕНЕНИЕМ СПОСОБА | 2017 |
|
RU2657325C1 |
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ШЕРОХОВАТОСТИ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2367904C2 |
| Среда для закалки изделий из металлов и сплавов | 1986 |
|
SU1411341A1 |

