Изобретение относится к радиолокации и может быть использовано в бортовых, наземных и корабельных радиолокационных станциях (РЛС) для разрешения отдельных целей из состава групповой в импульсном объеме.
Известен способ обнаружения групповой цели [Патент РФ №2157550 МПК G01S 5/04, 3/72]. Решение задачи основывается на том, что различные процедуры пеленгования групповой цели, протяженной по угловым координатам, дают несовпадающие пеленги. Для этого пеленгацию осуществляют одновременно на основе двух или более известных процедур (одноканальной, моноимпульсной, по направлению приема излучений бортовых радиоэлектронных средств) и принимают решение о наличии групповой цели, если разброс полученных значений пеленга превышает порог.
Недостаток способа состоит в том, что существенно снижается вероятность обнаружения групповой цели с увеличением дальности до нее.
Действительно, физической основой работоспособности способа является угловой шум цели. Угловая ошибка пеленгации РЛС, вызванная угловым шумом, определяется выражением σ=σуш/r (σуш - среднеквадратическое значение углового шума, выраженного в линейных единицах; r - дальность до групповой цели) [Справочник по радиолокации. Под ред. М.Сколника. Т.1. М.: Сов. радио, 1979, с.409]. Так как угловые ошибки, вызванные угловым шумом, обратно пропорциональны дальности, то влияние этого шума сказывается главным образом на средних и малых дальностях [Справочник по радиолокации. Под ред. М.Сколника. Т.1. М.: Сов. радио, 1979, с.409]. Так, если пеленгатор обеспечивает точность, равную 0,1×Θ (Θ - ширина диаграммы направленности антенны РЛС), то при ширине диаграммы в 1° ошибка пеленгации составит 1,7×10-3 рад. Максимальное среднеквадратическое значение углового шума групповой цели равно 0,5×L (L - наибольший размер групповой цели) [Справочник по радиолокации. Под ред. М.Сколника. Т.1. М.: Сов. радио, 1979, с.411]. Тогда для групповой цели с размером L, равным 100 м, угловая ошибка будет составлять 2,5×10-3 рад и 5×10-4 рад на дальностях 20 и 100 км соответственно. Как видно из приведенных расчетов, на больших дальностях ошибка, вызванная угловым шумом, существенно меньше ошибки самого пеленгатора, что приводит к снижению вероятности обнаружения групповой цели данным способом.
Известен способ обнаружения групповой цели [Патент РФ №2143706, МПК G01S 3/22]. Сущность способа заключается в том, что осуществляют оценку приращения сигнала пеленгационной ошибки, например, в угломестной плоскости ΔUε, и сравнивают ее с установленным порогом, соответствующим аппаратурной ошибке РЛС. Для повышения вероятности правильного обнаружения групповой цели сигнал пеленгационной ошибки Uε фиксируют в начале (Uεн) и в конце пачки (Uεк) суммарного сигнала, а также учитывают угол γ между плоскостью сканирования луча антенны РЛС и плоскостью пеленгации. При этом формируют выходной сигнал ΔUε=|Uεн-Uεк|, служащий для обнаружения групповой цели. При наличии одиночной цели значения Uε в начале Uεн, и в конце пачки Uεк остаются неизменными Uε=Uεн=Uεк, а при наличии групповой цели изменяются в соответствии со смещением энергетического центра, т.е. зависят от ее угловых размеров.
Недостатком способа, как и ранее рассмотренного, является зависимость вероятности правильного обнаружения групповой цели от дальности до нее.
Известен способ обнаружения групповой цели [Патент США №4536764, МПК G01S 7/28, 13/52]. Сущность способа заключается в том, что выделяют квадратурные составляющие комплексной огибающей принятого антенной сигнала, в каждой квадратурной составляющей осуществляют преобразование сигнала в цифровую форму, в пределах интервала, равного длительности зондирующего импульса, производят суммирование цифровых отсчетов, подвергают полученные в результате суммирования N отсчетов амплитудному взвешиванию, осуществляют фильтровую обработку по алгоритму N-точечного быстрого преобразования Фурье (БПФ), вычисляют модуль комплексной огибающей сигнала на выходе доплеровских фильтров, выбирают множество смежных доплеровских фильтров, определяют первую доплеровскую частоту f1 из названного множества смежных доплеровских фильтров, как частоту фильтра jmax1 с максимальной амплитудой сигнала, выбирают первое подмножество множества смежных доплеровских фильтров R1 с центром около выбранной первой доплеровской частоты f1, получают величину первого порога путем перемножения амплитуды сигнала первой доплеровской частоты f1 с первым множителем, меньшим единицы, в первом подмножестве множества смежных доплеровских фильтров R1, определяют группы амплитуд сигналов, превысивших первый порог, разделяют полученные группы амплитуд сигналов на кластеры, ширина которых составляет три доплеровских фильтра, подсчитывают количество кластеров для получения первого счета C1, ослабляют путем бланкирования амплитуды сигналов первой доплеровской частоты f1 и группы доплеровских частот, расположенных вблизи, определяют вторую доплеровскую частоту f2, как частоту фильтра jmах2 с максимальной амплитудой сигнала среди неослабленных сигналов из первого подмножества смежных доплеровских фильтров R2, выбирают второе подмножество множества смежных доплеровских фильтров R2 с центром около выбранной второй доплеровской частоты f2, получают величину второго порога путем перемножения амплитуды сигнала второй доплеровской частоты f2 со вторым множителем, если первый счет C1 меньше или равен единице, или путем перемножения амплитуды сигнала второй доплеровской частоты f2 с первым множителем, если первый счет С1 больше единицы, затем во втором подмножестве множества смежных доплеровских фильтров R2, определяют группы амплитуд сигналов, превысивших второй порог, разделяют полученные группы амплитуд сигналов на кластеры, ширина которого составляет три доплеровских фильтра, подсчитывают количество кластеров для получения второго счета С2, вычисляют промежуточный счет в соответствии с математическим выражением
C=C1-|C2-C1|+1,
приравнивают далее окончательный счет к промежуточному счету С, если полученный промежуточный счет С больше или равен единице, либо приравнивают окончательный счет к единице, если полученный промежуточный счет С меньше единицы, принимают решение об обнаружении групповой цели, если полученный окончательный счет больше единицы.
Недостатком способа является невысокая вероятность обнаружения групповой цели, доплеровские частоты сигналов которой находятся в пределах одного кластера, т.е. разрешающая способность способа-прототипа определяется шириной кластера, которая принципиально не может быть меньше ширины одного-трех доплеровских фильтров.
Наиболее близким техническим решением является способ обнаружения групповой цели [Патент РФ №2293349 (приоритет от 18.05.2005 г.) МПК G01S 13/04, 13/56]. Сущность способа заключается в том, что выделяют квадратурные составляющие комплексной огибающей принятого антенной сигнала, в каждой квадратурной составляющей осуществляют преобразование сигнала в цифровую форму, в пределах интервала, равного длительности зондирующего импульса, производят суммирование цифровых отсчетов, подвергают полученные в результате суммирования N отсчетов амплитудному взвешиванию, осуществляют фильтровую обработку по алгоритму N-точечного БПФ, для всех доплеровских фильтров сигнал в j-ом фильтре домножают на величину  , вычисляют модуль комплексной огибающей сигнала на выходе доплеровских фильтров, выбирают множество смежных доплеровских фильтров, определяют доплеровскую частоту f1 из названного множества смежных доплеровских фильтров, как частоту фильтра jmax1 с максимальной амплитудой сигнала, выбирают подмножество множества смежных доплеровских фильтров R1 с центром около выбранной доплеровской частоты f1, для всех фильтров подмножества R1 вычисляют коэффициент bj, равный отношению амплитуды сигнала j-го фильтра
, вычисляют модуль комплексной огибающей сигнала на выходе доплеровских фильтров, выбирают множество смежных доплеровских фильтров, определяют доплеровскую частоту f1 из названного множества смежных доплеровских фильтров, как частоту фильтра jmax1 с максимальной амплитудой сигнала, выбирают подмножество множества смежных доплеровских фильтров R1 с центром около выбранной доплеровской частоты f1, для всех фильтров подмножества R1 вычисляют коэффициент bj, равный отношению амплитуды сигнала j-го фильтра  к найденной максимальной амплитуде сигнала в фильтре jmах1
к найденной максимальной амплитуде сигнала в фильтре jmах1  :
:
вычисляют величины 
 равные разностям модулей соответствующих квадратурных составляющих сигнала j-го фильтра и произведений найденных коэффициентов bj на модули соответствующих квадратурных составляющих сигнала фильтра с максимальной амплитудой:
равные разностям модулей соответствующих квадратурных составляющих сигнала j-го фильтра и произведений найденных коэффициентов bj на модули соответствующих квадратурных составляющих сигнала фильтра с максимальной амплитудой:
рассчитывают показатель  как
как
сравнивают полученный показатель  с порогом обнаружения η, который устанавливают исходя из требуемого значения вероятности ложного обнаружения групповой цели, при превышении порога хотя бы в одном фильтре принимают решение об обнаружении групповой цели.
с порогом обнаружения η, который устанавливают исходя из требуемого значения вероятности ложного обнаружения групповой цели, при превышении порога хотя бы в одном фильтре принимают решение об обнаружении групповой цели.
Недостатками способа-прототипа являются невозможность определения количества и частот Доплера отдельных целей в составе групповой, а также невозможность разрешения групповой цели, доплеровские частоты сигналов которой находятся в пределах одного фильтра N-точечного БПФ, т.е. потенциальная разрешающая способность способа-прототипа определяется шириной одного доплеровского фильтра N-точечного БПФ.
Изобретение решает задачу: после обнаружения групповой цели согласно способу-прототипу обеспечить возможность определения количества и частот Доплера эхосигналов отдельных целей в составе групповой, в том числе в случае, когда доплеровские частоты сигналов отдельных целей находятся в пределах одного доплеровского фильтра N-точечного БПФ и отсутствует разрешение по дальности и угловым координатам.
Решение задачи заключается в том, что после осуществления суммирования цифровых отсчетов дополняют полученную в результате суммирования последовательность N отсчетов нулями до последовательности из М отсчетов, где
М=2n>N (n - целое число), подвергают полученные М отсчетов амплитудному взвешиванию, осуществляют фильтровую обработку по алгоритму M-точечного БПФ, вычисляют модуль комплексной огибающей сигнала на выходе алгоритма БПФ, выбирают множество смежных доплеровских фильтров, определяют доплеровскую частоту f1 из названного множества смежных доплеровских фильтров, как частоту фильтра jmах1 с максимальной амплитудой сигнала, выбирают подмножество множества смежных доплеровских фильтров R1 с центром около выбранной доплеровской частоты f1, составленный из комплексных амплитуд сигналов фильтров подмножества R1 вектор Z умножают на заранее рассчитываемую обратную автокорреляционную матрицу, сравнивают модули элементов полученного в результате умножения вектора Е с пороговыми значениями, которые устанавливают исходя из требуемых значений вероятностей ложных решений, при превышении порога i-м элементом вектора Е принимают решение о наличии сигнала отдельной цели в составе групповой с частотой Доплера, соответствующей i-му фильтру подмножества R1.
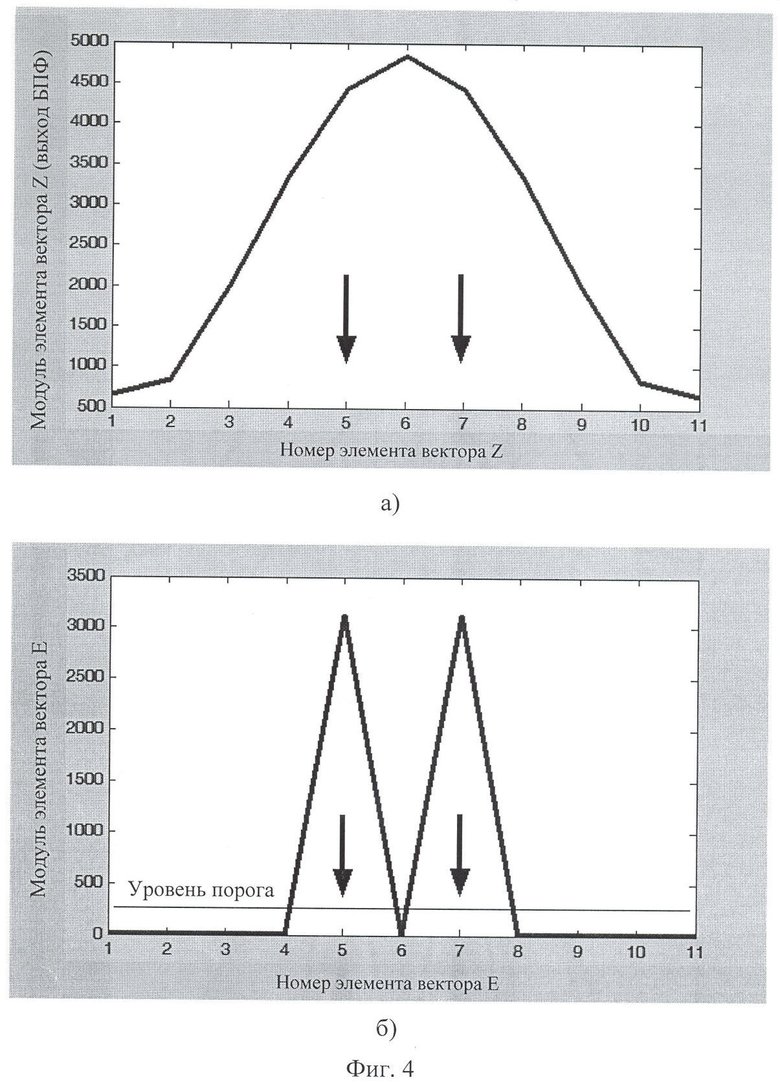
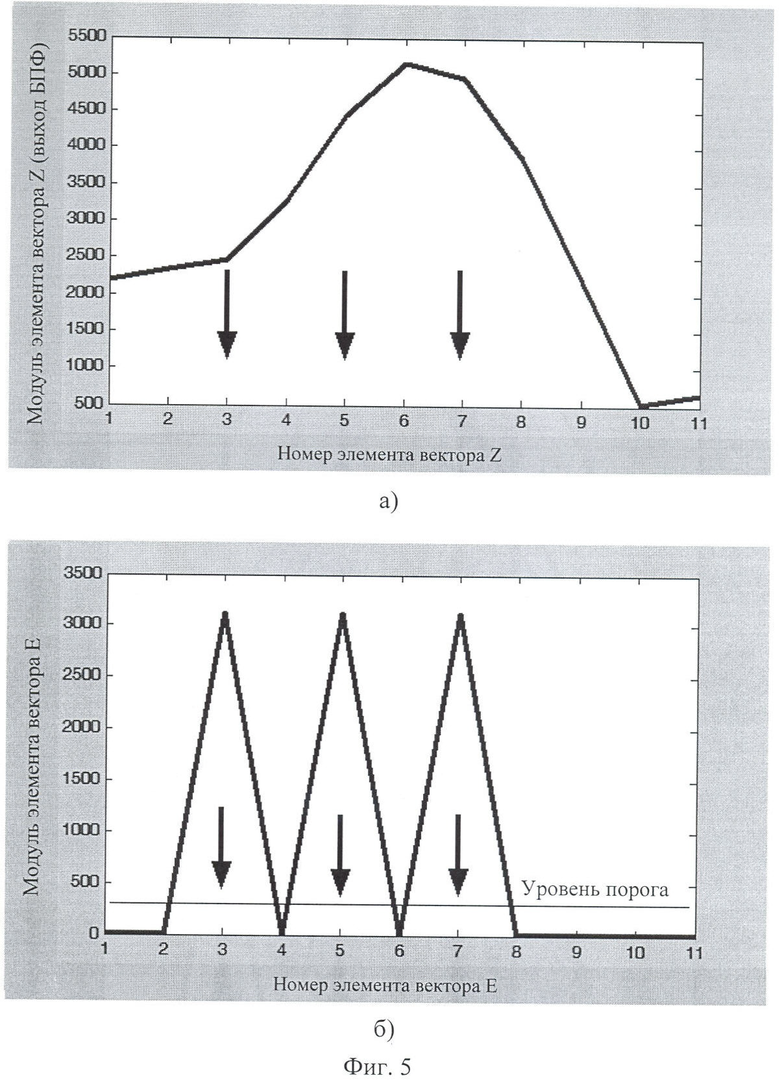
Изобретение поясняется чертежами. На фиг.1 изображена структурная схема устройства, реализующего предлагаемый способ разрешения групповой цели, где 1 - фазовый детектор, 2 - фильтр нижних частот, 3 - аналого-цифровой преобразователь, 4 - сумматор, 5 - антенна, 6 - приемник, 7 - гетеродин, 8 - процессор обработки сигналов. На фиг.2 представлена схема, поясняющая последовательность преобразования сигнала в процессоре обработки сигналов 8. На фиг.3-5 приведены диаграммы, демонстрирующие возможность определения предлагаемым способом количества и частот Доплера эхосигналов отдельных целей в составе групповой, в том числе в случае, когда доплеровские частоты сигналов отдельных целей находятся в пределах одного доплеровского фильтра N-точечного БПФ. На фиг.3-5 исходная последовательность из N отсчетов дополнена нулями до М отсчетов так, что M=4N. Поэтому отстояние фильтров по оси частот в полученном по результатам M-точечного БПФ подмножестве R1 в четыре раза меньше, чем отстояние (ширина) фильтров в N-точечном БПФ. На фиг.3 представлены результаты обработки сигналов для одноцелевой ситуации, на фиг.4 - для двухцелевой и на фиг.5 - для трехцелевой. На фиг.4 и фиг.5 отстояние по частоте Доплера эхосигналов целей соответствует половине ширины фильтра N-точечного БПФ.
Суть изобретения состоит в следующем. Известно, что отклик на сумму входных воздействий для линейных систем, к которым относится и алгоритм БПФ, представляет собой суперпозицию откликов на каждое воздействие. То есть отклик алгоритма БПФ на смесь эхосигналов отдельных целей из состава групповой есть не что иное, как сумма откликов на эхосигнал каждой отдельной цели. Отклик алгоритма БПФ на эхосигнал отдельной цели представляет собой смещенную на частоту Доплера автокорреляционную функцию весового окна, умноженную на комплексную амплитуду эхосигнала. Проведя обратное линейное преобразование выходного сигнала БПФ на подмножестве R1, определяют значения комплексных амплитуд эхосигналов отдельных целей из состава групповой на всех частотах, соответствующих точкам БПФ подмножества R1. Эхосигналы реальных отдельных целей "расположены" только в определенных точках частотной оси, соответствующих частотам Доплера эхосигналов этих целей. В этих точках из подмножества R1 после вышеуказанного обратного линейного преобразования формируются комплексные амплитуды этих эхосигналов. В остальных точках подмножества R1 формируются нули, так как отсутствуют эхосигналы реальных целей с такими частотами Доплера. При наличии шумов наблюдения в точках частотной оси, где отсутствуют реальные эхосигналы, будут получены значения, близкие к нулю. Сравнив модули полученных на подмножестве R1 оценок амплитуд с порогами, установленными исходя из уровня шумов наблюдения, оценивают количество и частоты Доплера эхосигналов отдельных целей из состава групповой. При этом потенциальная разрешающая способность определяется частотным удалением фильтров М-точечного БПФ.
Для получения конкретной зависимости, связывающей амплитуды эхо-сигналов отдельных целей из состава групповой с выходным сигналом алгоритма БПФ, введем ряд обозначений.
Пусть F1, F2, F3=…=Fn точки частотной оси, соответствующие точкам БПФ из подмножества R1(F2-F1=F3-F2=…=Fn-Fn-1=ΔF). Из сигналов на выходе алгоритма БПФ в точках подмножества R1 формируется вектор Z=[Z1 Z2 … Zn]T, Т - оператор транспонирования.
Поставив в соответствие каждой точке частотной оси некоторую амплитуду эхосигнала отдельной цели из состава групповой, то есть формально предположив, что в обрабатываемом сигнале присутствуют эхосигналы отдельных целей с частотами Доплера, соответствующими всем точкам частотной оси из подмножества
R1, запишем вектор комплексных амплитуд этих эхосигналов: E=[E1 Е2 … En]T. Так как в составе реальной групповой цели может присутствовать разное количество одиночных целей, то отдельные элементы вектора Е в действительности равны нулю.
Если в обрабатываемой реализации присутствует только эхосигнал цели с комплексной амплитудой Е1 и частотой Доплера F1, а амплитуды остальных целей равняются нулю (Е2=Е3=…=Еn=0), то вектор Z в отсутствие шумов наблюдения принимает вид
Z=[1ξ(F2-F1)…ξ(Fn-F1)TE1=[1ξ(ΔF)… ξ((n-1)ΔF)]ТЕ1,
где ξ(F) - автокорреляционная функция весового окна, конкретный вид которой зависит от используемой взвешивающей функции.
Аналогично, в случае, когда в обрабатываемой реализации присутствуют все n целей, соответствующих точкам подмножества R1, то:
В формуле (1) учтен тот факт, что значение автокорреляционной функции для отрицательного значения аргумента является комплексно сопряженным (оператор (*)).
Обозначив переменной Q матрицу значений автокорреляционной функции (автокорреляционную матрицу):
формулу (1) запишем в виде линейного матричного уравнения с неизвестным вектором Е:

Для нахождения Е из уравнения (3) домножим слева его обе части на матрицу Q-1, обратную к Q:

При отсутствии шумов наблюдения в результате вычисления Е согласно (4) формируются комплексные амплитуды эхосигналов реальных целей в точках, соответствующих их частотам Доплера. Остальные элементы вектора Е равняются нулю. В реальных радиолокационных системах присутствуют шумы наблюдения, это означает, что вектор Z в (1) будет несколько искажен, и элементы вектора Е также вычисляются с некоторой погрешностью. Поэтому для принятия решения о количестве и частотах Доплера эхосигналов отдельных целей из состава групповой необходимо сравнивать модули элементов вектора Е с пороговыми значениями. Последние выбираются исходя из требуемых значений вероятностей ложных решений.
Потенциальная разрешающая способность РЛС при реализации предлагаемого способа и увеличении отношения сигнал-шум зависит от отстояния по частоте ΔF точек БПФ. Для уменьшения величины ΔF после суммирования цифровых отсчетов входного сигнала в пределах интервала, равного длительности зондирующего импульса, следует дополнить полученную в результате суммирования последовательность N отсчетов нулями до М-последовательности, где М=2n>N (n - целое число). После этого возможно выполнение над входным сигналом М-точечного БПФ. Так как количество точек БПФ в исходном частотном диапазоне увеличивается, то отстояние между точками на частотной оси в М/N раз становится меньше по сравнению с N-точечным БПФ [Марпл-мл. С.Л. Цифровой спектральный анализ и его приложения. Пер. с англ. - М.: Мир, 1990, С.65].
Осуществляется предлагаемый способ обработки в импульсно-доплеровской РЛС. Один из вариантов структурной схемы устройства, реализующего предлагаемый способ обнаружения групповой цели, представлен на фиг.1. Принятый антенной 5 сигнал поступает на вход приемника 6. Для обеспечения когерентной обработки сигнал с выхода приемника 6 с помощью двух фазовых детекторов 1, гетеродина 7, фазовращателя на 90° 9 и двух фильтров нижних частот 2 разделяется на квадратурные составляющие. В аналого-цифровых преобразователях 3 производится формирование последовательности цифровых отсчетов квадратурных составляющих сигнала. Далее, в сумматорах 4 осуществляется суммирование цифровых отсчетов квадратурных составляющих сигнала. Суммирование, как и в способе-прототипе, осуществляется в пределах интервала, равного длительности зондирующего импульса.
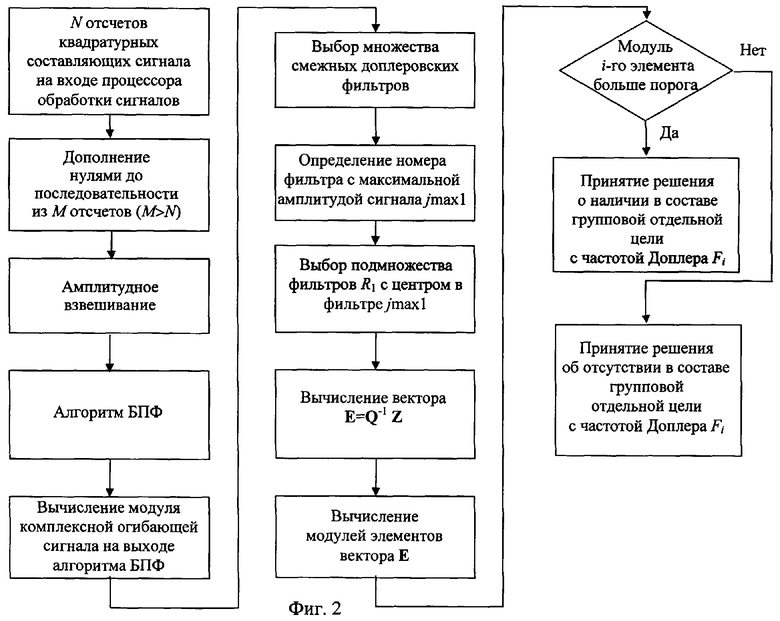
Вся дальнейшая обработка сигнала происходит в процессоре обработки сигналов 8. На фиг.2 представлена схема, поясняющая последовательность преобразования сигнала в процессоре обработки сигналов 8. Дополняют полученную в результате суммирования последовательность N отсчетов нулями до М-последовательности, где М=2n>N (n - целое число). Подвергают полученные М отсчетов амплитудному взвешиванию, осуществляют фильтровую обработку по алгоритму М-точечного БПФ. Затем вычисляют модуль комплексной огибающей сигнала на выходе алгоритма БПФ. Далее выбирают множество смежных доплеровских фильтров. Из выбранного множества смежных доплеровских фильтров определяют доплеровскую частоту f1, как частоту фильтра jmах1 с максимальной амплитудой сигнала, и выбирают подмножество множества смежных доплеровских фильтров R1 с центром около выбранной доплеровской частоты f1. Составленный из комплексных амплитуд сигналов фильтров подмножества R1 вектор Z умножают на заранее рассчитанную согласно формуле (2) обратную автокорреляционную матрицу Q-1. Сравнивают модули элементов полученного в результате умножения вектора Е с пороговыми значениями, которые устанавливают исходя из требуемых значений вероятностей ложных решений. При превышении порога i-м элементом вектора Е принимают решение о наличии сигнала отдельной цели в составе групповой с частотой Доплера, соответствующей i-му фильтру подмножества R1.
Подтверждение возможности получения вышеуказанного технического результата при осуществлении предлагаемого способа проводилось с помощью математического моделирования.
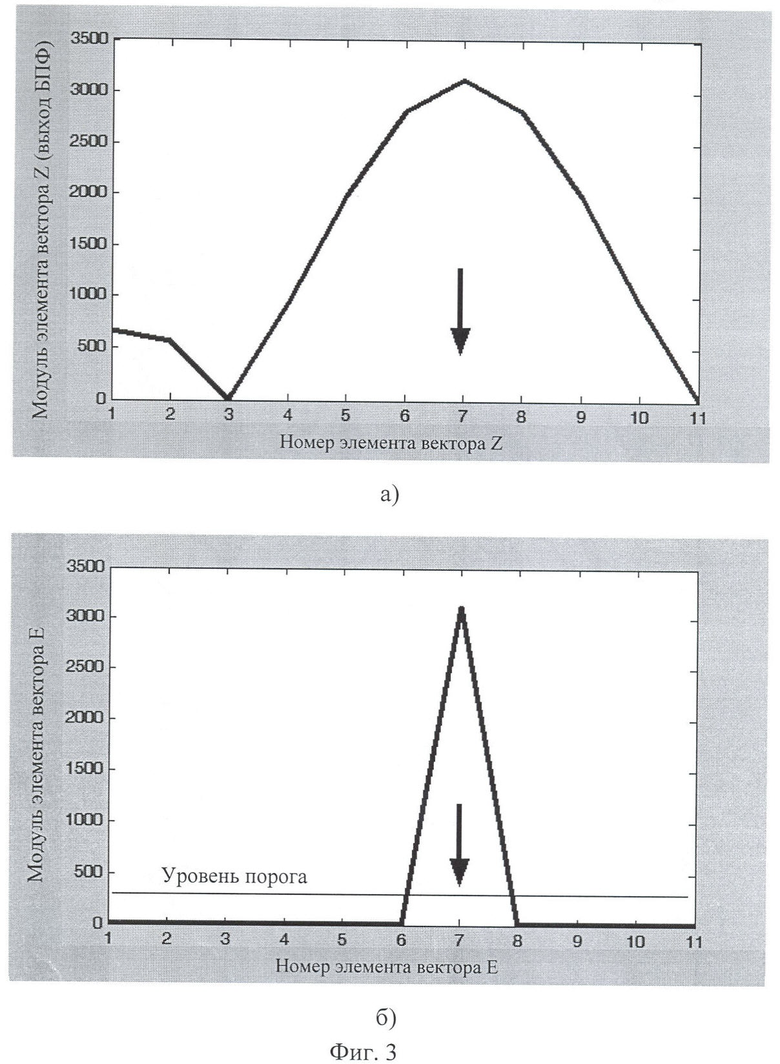
Моделировались три ситуации: в обрабатываемом сигнале присутствуют эхосигналы одной (фиг.3), двух (фиг.4) и трех (фиг.5) целей с равными амплитудами. В каждой ситуации сигнал подвергался амплитудному взвешиванию с прямоугольным окном (амплитуды отсчетов не менялись) с последующим вычислением вектора Z с помощью М-точечного БПФ. После чего согласно формуле (4) вычислялся вектор Е.
На фиг.3-5 приведены диаграммы, демонстрирующие возможность оценивания предлагаемым способом количества и частот Доплера эхосигналов отдельных целей в составе групповой, в том числе в случае, когда доплеровские частоты сигналов отдельных целей находятся в пределах одного доплеровского фильтра N-точечного БПФ. На фиг.3-5 исходная последовательность из N отсчетов дополнена нулями до М отсчетов так, что М=4N. Поэтому отстояние фильтров по оси частот в полученном по результатам М-точечного БПФ подмножестве R1 в четыре раза меньше, чем отстояние (ширина) фильтров в N-точечном БПФ. Истинные значения частот Доплера эхо-сигналов целей на фиг.3-5 обозначены вертикальными стрелками.
Из фиг.3-5 видно, что сравнение модулей элементов вектора Е с пороговыми значениями позволит определить количественный состав групповой цели и измерить частоты Доплера эхосигналов отдельных целей из состава групповой с точностью до одного фильтра M-точечного БПФ. Причем значение М ограничивается только вычислительными возможностями ЭВМ РЛС.
Использование изобретения в бортовых, наземных и корабельных РЛС не потребует изменения их принципов построения, режимов работы, существенных вычислительных затрат и позволит с высокой эффективностью разрешать групповую цель при отсутствии разрешения отдельных целей в группе по угловым координатам и дальности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2012 |
|
RU2492502C9 |
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2009 |
|
RU2407034C9 |
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2005 |
|
RU2293349C1 |
| СПОСОБ СЕЛЕКЦИИ ЦЕЛИ НА ФОНЕ УВОДЯЩЕЙ ПО СКОРОСТИ ПОМЕХИ | 2009 |
|
RU2411537C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2005 |
|
RU2298806C9 |
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2006 |
|
RU2316788C9 |
| Способ селекции движущихся целей | 2022 |
|
RU2820302C1 |
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С КОМПЕНСАЦИЕЙ ЧМ ДОПЛЕРОВСКИХ СИГНАЛОВ | 2017 |
|
RU2657462C1 |
| ОБНАРУЖИТЕЛЬ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2006 |
|
RU2323452C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ МЕШАЮЩИХ ОТРАЖЕНИЙ ОТ ОПТИЧЕСКИ НЕНАБЛЮДАЕМЫХ ОБЪЕКТОВ ("АНГЕЛОВ") | 2006 |
|
RU2308736C1 |
Изобретение относится к радиолокации и может быть использовано для разрешения отдельных целей из состава групповой в импульсном объеме. Достигаемым техническим результатом изобретения является повышение разрешающей способности групповой цели. Сущность способа заключается в том, что выделяют квадратурные составляющие комплексной огибающей принятого антенной сигнала, в каждой квадратурной составляющей осуществляют преобразование сигнала в цифровую форму, в пределах интервала, равного длительности зондирующего импульса, производят суммирование цифровых отсчетов, дополняют полученную в результате суммирования последовательность N отсчетов нулями до последовательности из М отсчетов, где M=2n>N (n - целое число), подвергают полученные М отсчетов амплитудному взвешиванию, осуществляют фильтровую обработку по алгоритму М-точечного быстрого преобразования Фурье (БПФ), вычисляют модуль комплексной огибающей сигнала на выходе алгоритма БПФ, выбирают множество смежных доплеровских фильтров, определяют доплеровскую частоту f1 из названного множества смежных доплеровских фильтров, как частоту фильтра jmax1 с максимальной амплитудой сигнала, выбирают подмножество множества смежных доплеровских фильтров R1 с центром около выбранной доплеровской частоты f1, составленный из комплексных амплитуд сигналов фильтров подмножества R1 вектор Z умножают на обратную автокорреляционную матрицу, сравнивают модули элементов полученного в результате умножения вектора Е с пороговыми значениями, при превышении порога i-м элементом вектора Е принимают решение о наличии сигнала отдельной цели в составе групповой с частотой Доплера, соответствующей i-му фильтру подмножества
R1. 5 ил.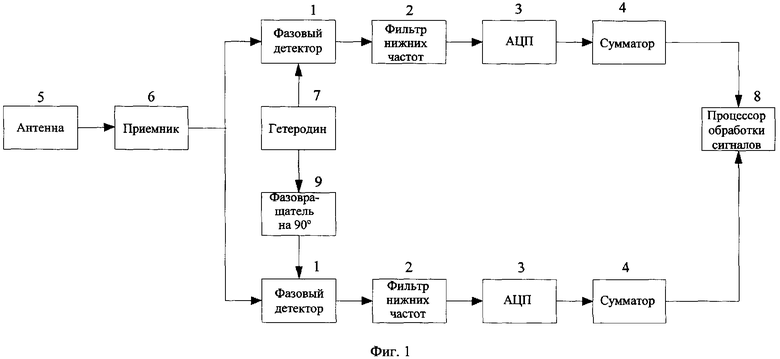
Способ разрешения групповой цели, заключающийся в том, что выделяют квадратурные составляющие комплексной огибающей принятого антенной сигнала, в каждой квадратурной составляющей осуществляют преобразование сигнала в цифровую форму, в пределах интервала, равного длительности зондирующего импульса, производят суммирование цифровых отсчетов, отличающийся тем, что дополняют полученную в результате суммирования последовательность N отсчетов нулями до последовательности из М отсчетов, где M=2n>N (n - целое число), подвергают полученные М отсчетов амплитудному взвешиванию, осуществляют фильтровую обработку по алгоритму М-точечного быстрого преобразования Фурье (БПФ), вычисляют модуль комплексной огибающей сигнала на выходе алгоритма БПФ, выбирают множество смежных доплеровских фильтров, определяют доплеровскую частоту f1 из названного множества смежных доплеровских фильтров как частоту фильтра jmax1 с максимальной амплитудой сигнала, выбирают подмножество множества смежных доплеровских фильтров R1 с центром около выбранной доплеровской частоты f1, составленный из комплексных амплитуд сигналов фильтров подмножества R1 вектор Z умножают на заранее рассчитываемую обратную автокорреляционную матрицу, сравнивают модули элементов полученного в результате умножения вектора Е с пороговыми значениями, которые устанавливают исходя из требуемых значений вероятностей ложных решений, при превышении порога i-м элементом вектора Е принимают решение о наличии сигнала отдельной цели в составе групповой с частотой Доплера, соответствующей i-му фильтру подмножества R1.
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2005 |
|
RU2293349C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2005 |
|
RU2298806C9 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА ЦЕЛЕЙ В ГРУППЕ | 2002 |
|
RU2260196C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ГРУППОВОЙ ВОЗДУШНОЙ ЦЕЛИ | 2006 |
|
RU2324952C1 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ДЛЯ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1989 |
|
RU2035051C1 |
| US 4217583 A, 12.08.1980 | |||
| US 4173017 A, 30.10.1979 | |||
| US 4490718 A, 25.12.1984 | |||
| Механизм шарнирно-рычажного антипараллелограмма | 1988 |
|
SU1610150A1 |

