Изобретение относится к радиолокации и может быть использовано в радиолокационных комплексах (РЛК) и радиолокационных системах (РЛС) контроля и управления воздушным движением, управления оружием.
Известны: 1) система обнаружения радиолокационных сигналов, отраженных от целей, в импульсно-доплеровской РЛС, содержащая N параллельных каналов обработки радиолокационного сигнала по дальности, в каждом из которых выполняется частотное селектирование в пределах участка спектра, свободного от составляющих помеховых отражений от земли, режектирование помеховых отражений, принимаемых по главному лепестку диаграммы направленности антенны, предварительное гетеродинирование с целью понижения промежуточной частоты, оконечная доплеровская фильтрация принимаемого сигнала в блоке доплеровских фильтров, с выходов которых сигнал через детектор и интегратор подается на пороговое устройство и далее на схему совпадения для дальнейшей обработки [1, Бакулев П.А., Степин В.М. Методы и устройства селекции движущихся целей. - М.: Радио и связь, 1986 г., рис.10.25, стр.271-273], 2) система обнаружения радиолокационных сигналов, отраженных от целей, в импульсно-доплеровской РЛС, содержащая N параллельных каналов обработки радиолокационного сигнала по дальности, в каждом из которых выполняется частотное селектирование в пределах участка спектра, свободного от составляющих помеховых отражений от земли, подавление мешающих отражений от земли, принимаемых по основному лучу диаграммы направленности антенны, предварительное гетеродинирование сигнала с целью понижения значения промежуточной частоты, оконечная доплеровская фильтрация принимаемого сигнала с помощью набора доплеровских фильтров, с выходов которых сигнал через амплитудный детектор, последетекторный фильтр и пороговое устройство поступает к индикатору [2, Радиолокационные устройства. Теория и принципы построения. Под ред. В.В.Григорина - Рябова. - М.: Советское радио, 1970 г., рис.13.18, стр.366-370], 3) система обнаружения радиолокационных сигналов, отраженных от целей, в импульсно-доплеровской РЛС, содержащая N параллельных каналов обработки радиолокационного сигнала по дальности, в каждом из которых с помощью фильтра зоны фильтрации выполняется предварительное частотное селектирование в пределах заданного участка спектра и оконечная доплеровская фильтрация принимаемого сигнала с помощью набора доплеровских фильтров, с выходов которых сигнал, обычно через пороговое устройство, поступает в систему индикации [3, Многофункциональные радиоэлектронные комплексы истребителей. Под ред. Г.С.Кондратенкова - М.: Военное издательство, 1994 г., рис.2.1.4, стр.51-56 (прототип)].
Недостатками этих многоканальных систем обнаружения радиолокационных сигналов, отраженных от целей, являются:
ограниченные возможности обнаружения и точного оценивания скорости движущихся целей по смещению доплеровской частоты с требуемыми показателями в ситуации, когда цель перемещается в пространстве с ускорением, а также высокая вероятность принятия ложного решения о наличии помехового, а не полезного сигнала в этой же ситуации [1, 2, 3];
невозможность обнаружения отраженных сигналов от интенсивно маневрирующих целей [1, 2, 3].
Из известных технических решений наиболее близким (прототипом) является система обнаружения радиолокационных сигналов, отраженных от целей [3], содержащая N параллельно соединенных каналов обработки радиолокационных сигналов по дальности, на входы которых подаются отраженные от целей сигналы с выхода приемного устройства, а каждый из N каналов содержит стробирующий каскад, первый вход которого соединен с выходом приемного устройства, а на второй вход подаются стробирующие импульсы, и фильтр зоны фильтрации, вход которого соединен с выходом стробирующего каскада, а выход соединен параллельно со входами R узкополосных доплеровских фильтров, выход каждого из которых соединен последовательно через пороговое устройство со входом системы индикации. Максимальное значение N=Q-1, где Q - скважность, определяемая отношением периода повторения зондирующей последовательности радиоимпульсов к длительности стробирующего импульса, равного, как правило, длительности зондирующего импульса, R определяется произведением полосы зоны фильтрации на длительность времени накопления (приема) отраженных от целей сигналов.
Известная система обнаружения радиолокационных сигналов осуществляет селекцию отраженных от целей сигналов по дальности и доплеровскому смещению частоты, принимает решение об обнаружении целей, находящихся в зоне радиолокационного наблюдения, выдает данные об обнаруженных целях в систему индикации. Излученные и отраженные от целей сигналы принимаются антенной РЛС и поступают в приемное устройство для преобразования несущей частоты и последующего усиления. С выхода усилителя отраженный от цели сигнал поступает на несколько, в общем случае N, параллельно соединенных и идентичных каналов дальности. На входе каждого канала выполнен стробирующий каскад, на первый вход которого поступает сигнал с выхода приемного устройства, а на второй - стробирующий импульс. В каждом канале дальности стробирующий импульс смещен на свое время задержки τз1, τз2,...τзN относительно момента излучения зондирующих импульсов передатчика, образуя таким образом многоканальную по дальности систему обнаружения радиолокационных сигналов, отраженных от целей, перекрывающую весь диапазон просматриваемых дальностей за исключением "слепых" зон по дальности. Взаимное расположение стробирующих импульсов, поступающих соответственно на стробирующий каскад первого, второго, ..., N-го каналов по дальности показано на фиг.1. На фиг.1 показаны: последовательность зондирующих импульсов (эпюра 1), далее соответственно стробирующий импульс, поступающий на стробирующий каскад первого канала по дальности (эпюра 2), второго канала по дальности (эпюра 3), третьего канала по дальности (эпюра 4), N-го канала по дальности (эпюра 5).
На выходе стробирующего каскада выполнен фильтр зоны фильтрации, с помощью которого выделяется зона спектра, в которой происходит обнаружение сигналов целей. Сигнал с выхода фильтра зоны фильтрации подается на набор узкополосных доплеровских фильтров, полоса пропускания которых определяется временем когерентного накопления отраженного от цели сигнала. Количество узкополосных доплеровских фильтров выбирается из условия обеспечения просмотра всей зоны фильтрации, определяемой полосой пропускания фильтра зоны фильтрации. С выходов узкополосных доплеровских фильтров сигнал поступает на пороговое устройство, превышение сигнала в котором по окончании времени обработки принимаемого сигнала (времени когерентного накопления) является сигналом о наличии в зоне наблюдения цели с параметрами, соответствующими данному каналу дальности и доплеровского смещения частоты. Сигналы с выходов тех узкополосных доплеровских фильтров, в которых произошло превышение порога, поступают в устройство индикации и для дальнейшей обработки.
Недостатки прототипа полностью совпадают с недостатками аналогов, а именно:
система не обеспечивает высокой вероятности правильного обнаружения и точного оценивания скорости движущихся целей по смещению доплеровской частоты в ситуации, когда цель перемещается в пространстве с ускорением, в этой же ситуации высока вероятность принятия ложного решения о наличии помехового, а не полезного сигнала, а также система не обнаруживает сигналы, отраженные от интенсивно маневрирующих целей.
Основной причиной этих недостатков является появление в отраженном сигнале при наблюдении цели перемещающейся с ускорением (маневрирующей), линейно-частотной модуляции несущей частоты. Указанное обстоятельство приводит к расширению спектра отраженного сигнала и, соответственно, к несогласованной (неоптимальной) обработке принимаемого сигнала в системе обнаружения, требующей, чтобы полоса пропускания узкополосного доплеровского фильтра была равна ширине спектра сигнала.
Таким образом, задачей изобретения является высокая вероятность правильного обнаружения и точного оценивания скорости движущихся целей для случаев перемещения ее в пространстве как равномерно и прямолинейно с постоянной скоростью, так и при движении ее с ускорением, а также уменьшение вероятности принятия ложного решения о помеховом характере отраженного от цели сигнала в случае перемещения цели в пространстве с ускорением.
Поясним, на чем основано достижение поставленной задачи.
При радиолокационном наблюдении маневрирующей цели отраженный от цели сигнал представляет собой пачку радиоимпульсов с линейным законом изменения несущей частоты от импульса к импульсу в пределах пачки, причем девиация частоты в пределах длительности пачки зависит только от величины радиального ускорения. Следует отметить, что среднее значение несущей частоты отраженного сигнала отличается от несущей частоты зондирующего сигнала на величину доплеровскогс смещения частоты за счет движения цели.
Тогда отраженный от маневрирующей цели сигнал представляет собой линейно-частотно-модулированный (ЛЧМ) сигнал, причем девиация частоты такого сигнала (при заданном времени когерентного накопления и длине волны) зависит только от величины радиального ускорения цели.
Если система обработки предназначена только для сигналов, отраженных от целей, движущихся равномерно и прямолинейно (что соответствует условию согласования полосы пропускания доплеровского фильтра с шириной частотной составляющей спектра отраженного сигнала), то при обнаружении маневрирующей цели сигнал от нее будет наблюдаться в нескольких рядом расположенных фильтрах, что уменьшит его амплитуду в отдельном доплеровском фильтре и при определенных условиях, определяемых алгоритмом обработки сигналов при воздействии внешних помех, может быть воспринято как появление помехового сигнала типа доплеровского шума.
Поэтому для согласованной обработки отраженного от маневрирующей цели сигнала необходимо произвести когерентное накопление сигнала с линейно-частотной модуляцией и отрегулировать параметры системы обработки с учетом изменения частоты сигнала вследствие движения цели и изменения индекса линейно-частотной модуляции в зависимости от величины радиального ускорения цели. Представленная система обнаружения радиолокационных сигналов обеспечивает выполнение этих условий.
На фиг.1 представлена последовательность зондирующих и стробирующих импульсов.
На фиг.2 представлена структурная схема предлагаемой системы обнаружения радиолокационных сигналов.
На фиг.3 - структурная схема блока обработки радиолокационного сигнала по ускорению.
На фиг.4 - структурная схема блока обработки радиолокационного сигнала по скорости.
На фиг.5 показан закон изменения частоты сигнала, отраженного от маневрирующей цели на входе блока обработки радиолокационного сигнала по ускорению.
На фиг.6 показан закон изменения частоты сигнала, отраженного от маневрирующей цели на выходе блока обработки радиолокационного сигнала по ускорению.
На фиг.7-16 представлены результаты моделирования по оценке работоспособности предлагаемой системы обнаружения радиолокационных сигналов.
Система обнаружения радиолокационных сигналов (фиг.2) содержит N параллельно соединенных каналов обработки радиолокационных сигналов по дальности, причем максимальное значение N=Q-1, где Q определяется отношением периода повторения зондирующей последовательности радиоимпульсов к длительности стробирующего импульса, равного, как правило, длительности зондирующего импульса. Каждый из N каналов содержит стробирующий каскад 1, первый вход которого является входом системы обнаружения, а на второй вход подают стробирующие импульсы, и фильтр зоны фильтрации 2, вход которого соединен с выходом стробирующего каскада. В систему обнаружения дополнительно введены N блоков 3 обработки радиолокационного сигнала по ускорению, К генераторов 4 опорного сигнала (К определяется отношением диапазона возможных ускорений перемещения целей к величине дискретизации ускорений), N блоков 5 обработки радиолокационного сигнала по скорости и пороговое устройство 6. Выходы фильтров 2 зоны фильтрации первого, второго..., N-го каналов обработки радиолокационного сигнала по дальности соединены соответственно с первыми входами первого, второго,..., N-го блоков 3 обработки радиолокационного сигнала по ускорению; второй, третий,..., (К+1)-ый входы которых соединены параллельно соответственно с выходами первого, второго,..., К-го генераторов 4 опорного сигнала. Первый, второй,..., К-ый выходы первого, второго,..., N-го блоков 3 обработки радиолокационного сигнала по ускорению соединены соответственно с первым, вторым,..., К-ым входами первого, второго,..., N-го блоков 5 обработки радиолокационного сигнала по скорости. Первый, второй,..., KR-ый выходы каждого (R определяется произведением полосы зоны фильтрации на длительность времени накопления (приема) отраженных от целей сигналов) блока 5 обработки радиолокационного сигнала по скорости, соединены соответственно с первым, вторым,..., KR-ым,..., (KR+N)-ым, KRN-ым входами порогового устройства 6, сигнал с выхода которого является выходным сигналом системы и может быть использован для индикации.
Стробирующий каскад 1 представляет собой устройство совпадения, схема которого известна [4, Браммер Ю.А., Пащук И.Н. Импульсные и цифровые устройства. - М.: Высшая школа, 1999 г., стр.343, рис.9.30].
В фильтре 2 зоны фильтрации осуществляется предварительная доплеровская фильтрация отраженного от цели радиолокационного сигнала. Полоса пропускания фильтра 2 зоны фильтрации каждого канала рассчитывается в зависимости от диапазона возможных значений доплеровских частот сигналов, отраженных от целей, и частоты повторения зондирующих импульсов.
Схема построения такого фильтра 2 известна [5, М.К.Белкин, В.Т.Белинский, Ю.Л.Мазор, Р.М.Терещук. Справочник по учебному проектированию приемно-усилительных устройств. - Вища школа, 1988 г., стр.134, рис.5.36].
Генератор 4 опорного сигнала представляет собой генератор линейно-частотно-модулированного сигнала, схема которого известна [6, Ч.Кук, М.Бернфельд. Радиолокационные сигналы - М.: Советское радио, 1971, стр.161, рис.6.12.], причем крутизна изменения частоты каждого из К генераторов отличается друг от друга на некоторое постоянное значение, определяемое требуемой разрешающей способностью по ускорению. При этом под крутизной (k) сигнала понимается отношение девиации частоты сигнала ΔF к его длительности Тс, то есть k=ΔF/Тc. Таким образом, первый генератор 4 опорного сигнала формирует сигнал с крутизной k1, второй - k2,...,К-ый - kk. Следует отметить, что один из генераторов 4 опорного сигнала формирует сигнал с крутизной k=0, то есть сигнал, в котором отсутствует линейная модуляция несущей частоты. Формирование указанного сигнала позволяет обеспечить обнаружение сигнала в том случае, если принимаемый сигнал отражен от цели, двигающейся равномерно и прямолинейно.
Пороговое устройство 6 представляет собой устройство сравнения (компаратор), схема которого известна [6, Браммер Ю.А., Пащук И.Н. Импульсные и цифровые устройства. - М.: Высшая школа, 1999 г., стр.101, рис.3.19].
Каждый блок 3 обработки радиолокационного сигнала по ускорению (фиг.3) содержит параллельно соединенные первый, второй,..., К-ый умножители 7 сигналов, первые входы которых являются первыми входами блока 3 обработки радиолокационного сигнала по ускорению, второй вход первого умножителя 7 сигналов является вторым входом блока 3 обработки радиолокационного сигнала по ускорению, второй вход второго умножителя 7 сигналов является третьим входом блока 3 обработки радиолокационного сигнала по ускорению..., второй вход К-го умножителя 7 сигналов является (К+1)-м входом блока 3 обработки радиолокационного сигнала по ускорению, а выходы первого, второго, третьего,..., К-го умножителей 7 сигналов являются соответственно первым, вторым, третьим,..., К-ым выходами блока 3 обработки радиолокационного сигнала по ускорению. С помощью указанной схемы соединения умножителей 7 сигналов осуществляется операция умножения отраженного сигнала на опорный сигнал, формируемый генератором 4 опорного сигнала. При этом происходит демодуляция линейного закона изменения частоты отраженного сигнала, то есть устранение квадратичного набега фазы, обусловленного маневрированием цели. Собственно умножитель 7 сигналов известен [7, М.К.Белкин, В.Т.Белинский, Ю.Л.Мазор, Р.М.Терещук. Справочник по учебному проектированию приемно-усилительных устройств. - Вища школа, 1988 г., стр.181, рис.7.2- 7.5].
Каждый блок 5 обработки радиолокационного сигнала по скорости (фиг.4) содержит первый, второй, третий,..., К-ый блоки 8 узкополосной доплеровской фильтрации, причем первый вход блока 5 обработки радиолокационного сигнала по скорости, соединенный с первым выходом блока 3 обработки радиолокационного сигнала по ускорению, является входом первого блока 8 узкополосной доплеровской фильтрации, второй вход блока 5 обработки радиолокационного сигнала по скорости, соединенный со вторым выходом блока 3 обработки радиолокационного сигнала по ускорению, является входом второго блока 8 узкополосной доплеровской фильтрации, К-ый вход блока 5 обработки радиолокационного сигнала по скорости, соединенный с К-ым выходом блока 3 обработки радиолокационного сигнала по ускорению, является входом К-го блока 8 узкополосной доплеровской фильтрации.
Каждый блок 8 узкополосной доплеровской фильтрации содержит первый, второй, ..., R-ый доплеровские фильтры 9, причем входной сигнал блока 8 узкополосной доплеровской фильтрации подается параллельно на входы первого, второго, ..., R-го доплеровских фильтров 9, а выходы первого, второго, ..., R-го доплеровских фильтров 9 являются соответственно первым, вторым,..., R-ым выходами блока 8 узкополосной доплеровской фильтрации.
Выходы первого, ..., R-го доплеровских фильтров 9 первого блока 8 узкополосной доплеровской фильтрации являются соответственно первым, ..., R-ым выходами блока 5 обработки радиолокационного сигнала по скорости, выходы первого, ..., R-го доплеровских фильтров 9 второго блока 8 узкополосной доплеровской фильтрации являются соответственно (R+1)-ым, ..., 2Р-ым выходами блока 5 обработки радиолокационного сигнала по скорости, выходы первого, ..., R-го доплеровских фильтров 9 К-го блока 8 узкополосной доплеровской фильтрации являются соответственно (R+К)-ым, ..., KR-ым выходами блока 5 обработки радиолокационного сигнала по скорости.
В блоке 8 узкополосных доплеровских фильтров осуществляется окончательная доплеровская фильтрация отраженного от цели радиолокационного сигнала с помощью набора (от 1 до R) доплеровских фильтров 9, настроенных на различные значения доплеровского смещения частоты, которые могут содержаться в отраженном сигнале при наблюдении движущихся целей в пределах зоны фильтрации, определяемой полосой пропускания фильтра 2 зоны фильтрации. Полоса пропускания доплеровского фильтра 9 обратно пропорциональна времени когерентного накопления (приема) отраженных от целей сигналов. Окончательно сигнал будет формироваться на выходе того доплеровского фильтра 9, значение частоты настройки которого соответствует доплеровскому смещению частоты, содержащемуся в отраженном от цели сигнале.
Операция окончательной доплеровской фильтрации может быть выполнена аппаратурным либо программным способом. В первом случае схема доплеровского фильтра 9 известна [8, М.К.Белкин, В.Т.Белинский, Ю.Л.Мазор, Р.М.Терещук. Справочник по учебному проектированию приемно-усилительных устройств. - Вища школа, 1988 г., стр.109, рис.5.12]. Во втором случае узкополосная доплеровская фильтрация может быть осуществлена на основе алгоритмов дискретного или быстрого преобразований Фурье [9, Справочник по устройствам цифровой обработки информации. - Киев, Технiка, 1988 г., стр.8-12, стр.300-301, рис.5.16].
Рассмотрим, как происходит функционирование предлагаемой системы обнаружения радиолокационных сигналов.
На вход системы обнаружения поступают сигналы на промежуточной частоте с выхода внешнего приемного устройства, причем сигналы поступают параллельно на входы всех стробирующих каскадов 1. Сигнал на выходе стробирующего каскада 1 формируется только в том случае, если по времени поступления он совпадает с положением соответствующего стробирующего импульса (фиг.1). Выходной сигнал такого стробирующего каскада 1 поступает в соответствующий фильтр 2 зоны фильтрации, полоса пропускания и частота настройки которого зависят от значения частоты повторения зондирующих сигналов (высокая или средняя частота повторения), а также от диапазона возможных значений доплеровских частот сигналов, отраженных от целей.
На выходе фильтра 2 зоны фильтрации сигнал теряет свою импульсную структуру, то есть становится непрерывным и далее подается в блок 3 обработки сигналов по ускорению, в котором осуществляется демодуляция линейного закона изменения частоты сигнала, отраженного от маневрирующей цели. На фиг.5 показан закон изменения частоты f(t) сигнала, отраженного от маневрирующей цели на входе блока обработки радиолокационного сигнала по ускорению, где fпр - значение промежуточной частоты сигнала, fдц - величина доплеровского смещения частоты, обусловленного движением цели, tн - момент начала накопления сигнала, tК - момент окончания накопления сигнала. На фиг.6 показан закон изменения частоты сигнала, отраженного от маневрирующей цели, на выходе блока обработки радиолокационного сигнала по ускорению.
Демодуляция линейного закона изменения частоты принимаемого сигнала достигается за счет его умножения на опорный сигнал, формируемый в соответствующем генераторе 4 опорного сигнала, частота которого также изменяется по линейному закону и который является комплексно сопряженным по отношению к сигналу, отраженному от интенсивно-маневрирующей цели, с точностью до значения величины начальной фазы сигнала [10, Радиолокационные станции воздушной разведки. Под ред. Г.С.Кондратенкова. - М.: Воениздат, 1983, стр.91-93]. Отраженный от маневрирующей движущейся цели сигнал, кроме того, что его частота изменяется по линейному закону, характеризуется тем, что за счет движения цели несущая частота данного сигнала отличается от несущей частоты зондирующего сигнала на значение доплеровского смещения частоты (фиг.5). Поэтому на выходе соответствующего умножителя сигнала 7, расположенного в блоке 3 обработки сигналов по ускорению, формируется сигнал, частота которого уже не является функцией линейного изменения во времени, но значение частоты которого отличается от частоты зондирующего сигнала на величину доплеровского смещения (фиг.6). Исходя их этого, для определения доплеровской частоты сигнала, а соответственно и скорости движения цели, необходимо выполнить операцию узкополосной доплеровской фильтрации, что и обеспечивается с помощью доплеровских фильтров 9.
С выходов доплеровских фильтров 9 сигналы поступают на пороговое устройство 6 и при условии, что по окончании времени когерентного накопления величина сигнала на выходе доплеровского фильтра 9 превышает величину порогового значения, сигнал поступает па выход системы обнаружения, например в систему индикации. Величина порога устанавливается исходя из условия обеспечения заданной вероятности правильного обнаружения целей при заданном значении вероятности ложной тревоги, например, по критерию Неймана-Пирсона.
В качестве примера приведем расчетные данные предлагаемой системы обнаружения целей при следующих условиях: Q=4; время когерентного накопления (приема) отраженного от целей сигнала равно 10 мс; полоса пропускания фильтра зоны фильтрации равна 90 кГц; диапазон возможных ускорений целей составляет от (+(0-60)м/с) для приближающихся целей, до (-(0-60)м/с2) - для удаляющихся целей; величина дискретизации ускорения равна 5 м/с. В этом случае N=3, R=900, K=23.
Для оценки эффективности предлагаемого устройства обработки радиолокационных сигналов было проведено моделирование. В процессе моделирования исследовались возможности предлагаемой системы обнаружения радиолокационных сигналов при соответствии (несоответствии) значений доплеровских смещений частот, содержащихся в отраженном сигнале, частотам настройки доплеровских фильтров, а также соответствии (несоответствии) значений радиальных ускорений целей, содержащихся в отраженном сигнале, настройкам блока обработки сигналов по ускорению. В качестве оценки эффективности устройства обработки сигналов использовалась функция неопределенности радиолокационного сигнала, которую можно рассматривать как напряжение, наблюдаемое на выходе устройства обработки [11. Ч.Кук, М.Бернфельд Радиолокационные сигналы - М.: Советское радио, 1971, рис.4.1, стр.77-81].
Было проведено имитационное моделирование эволюции полета цели относительно РЛС и процессов обнаружения сигналов, отраженных от маневрирующих целей.
На фиг.7-16 представлены результаты цифрового моделирования системы обнаружения радиолокационных сигналов, представленной на фиг.2, при следующих условиях: длительность когерентного накопления сигнала составляла 0,1 с, в качестве опорной функции использовался сигнал, комплексно-сопряженный с сигналом, отраженным от интенсивно-маневрирующей цели, диапазон доплеровской фильтрации сигнала (полоса пропускания фильтра зоны фильтрации) составляет 60 кГц, в качестве зондирующего сигнала используется сигнал в виде когерентной пачки радиоимпульсов.
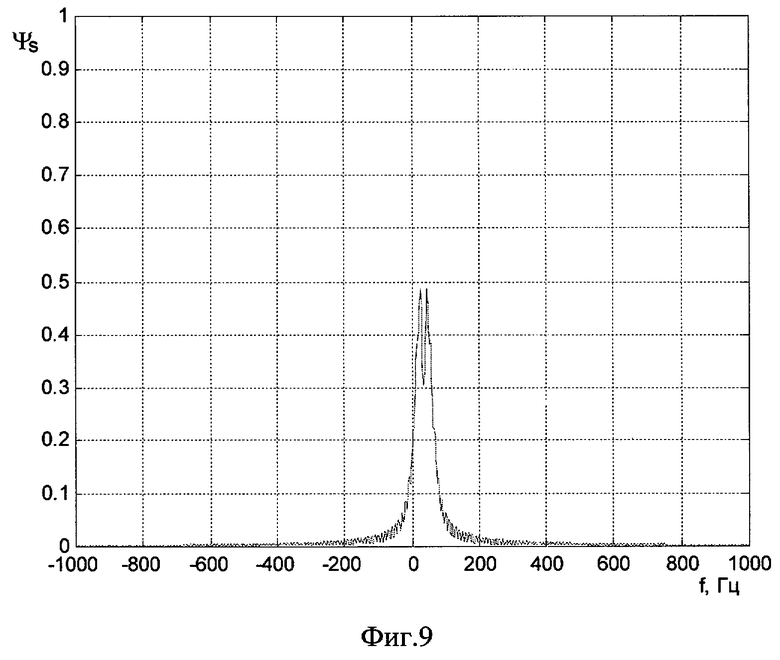
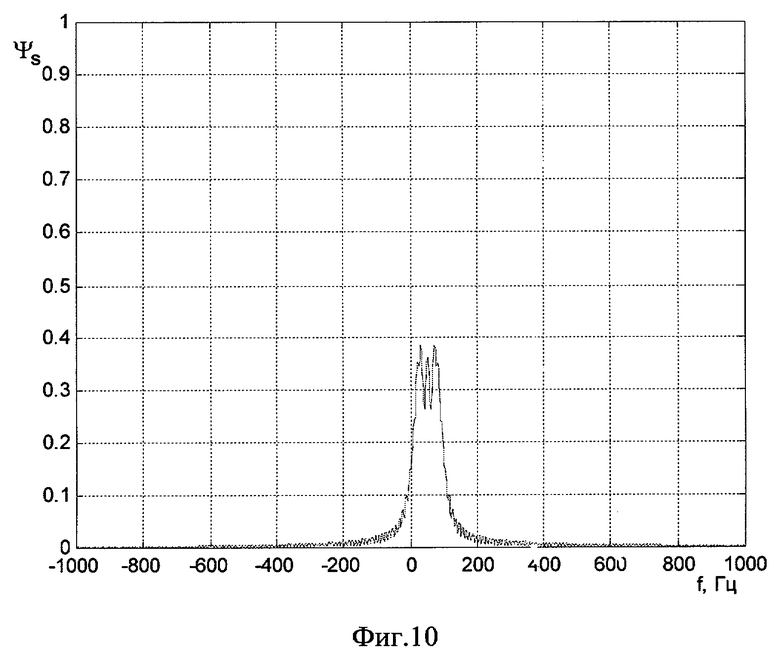
На фиг.7-11 представлено сечение сигнальной части функции неопределенности по оси доплеровских частот (ν) в зависимости от величины расстройки параметров отраженного и опорного сигналов по радиальному ускорению. На фиг.7 представлено сечение сигнальной части функции неопределенности для случая, когда величины доплеровской частоты отраженного сигнала и радиального ускорения цели полностью совпадают с частотой настройки доплеровского фильтра и значением радиального ускорения цели, содержащимся в параметрах опорного сигнала. На фиг.8 представлено сечение сигнальной части функции неопределенности для случая, когда величина доплеровской частоты совпадает с частотой настройки доплеровского фильтра, однако значение радиального ускорения отличается от значения радиального ускорения цели, содержащегося в параметрах опорного сигнала на величину 5 м/с2 (0,5g). Соответственно, на фиг.9-11 отличие в значениях радиального ускорения от значения радиального ускорения цели, содержащееся в параметрах опорного сигнала, составляет 10 м/с2 (1g), 15 м/с2 (1,5 g), 20 м/с2 (2 g). Анализ представленных сечений показывает, что, начиная с величины расстройки по радиальному ускорению, превышающему 15 м/с2 (1,5 g), имеет место значительное (более чем в 2 раза) уменьшение амплитуды сигнала на выходе доплеровского фильтра, наблюдается расширение и многопиковость сечения функции неопределенности. Таким образом, если отличие в параметрах отраженного от цели сигнала и опорного сигнала составляет более 15 м/с2 (1,5 g), то можно предположить, что обнаружение сигнала от интенсивно маневрирующей цели практически невозможно. В то же время при отличии в параметрах отраженного от цели сигнала и опорного сигнала около 10 м/с2 (1g) обнаружение цели возможно, но наблюдаемая многопиковость (фиг.9) может привести к неправильному принятию решения о количестве наблюдаемых целей.
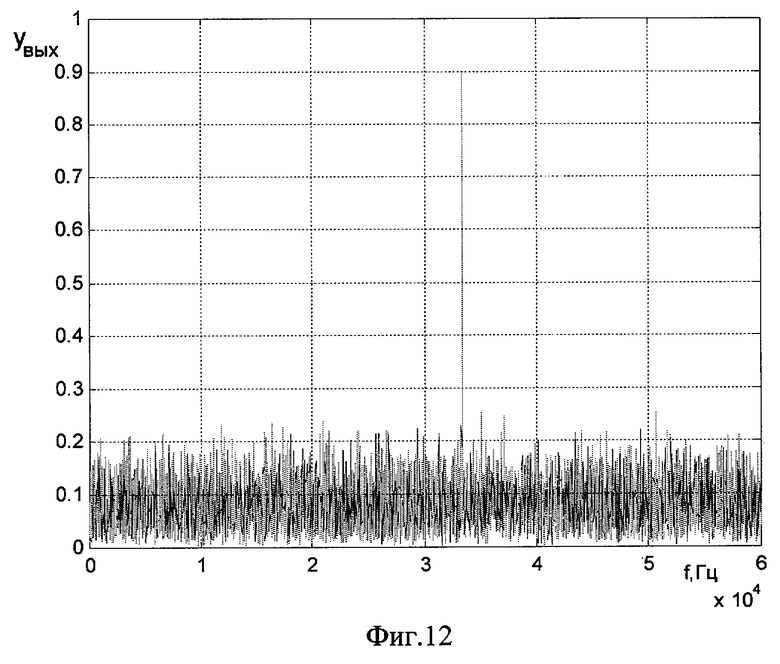
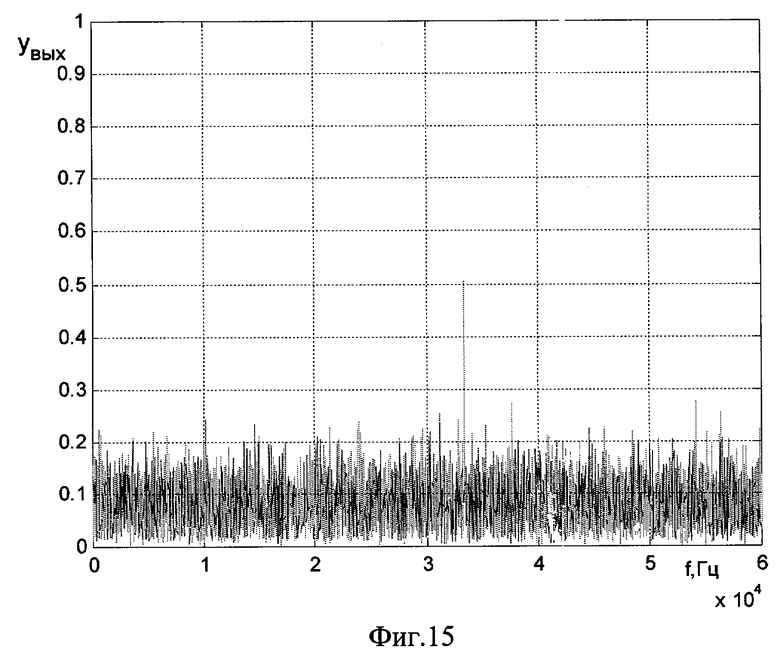
На фиг.12-16 представлены результаты моделирования для случая, когда обнаружение сигнала, отраженного от маневрирующей цели, осуществляется на фоне внутренних шумов приемного устройства. При этом диапазон доплеровской фильтрации (полоса пропускания фильтра зоны фильтрации) сигнала составлял 60 кГц, значение скорости цели равно Vц=500 м/с, доплеровское смещение частоты сигнала составляет 33 кГц, величина среднеквадратического значения шума задавалась равной 0,14в, отношение сигнал/шум на выходе блока быстрого преобразования Фурье (блока узкополосной доплеровской фильтрации) равно 20 Дб, моделировалась одна реализация шумового напряжения. На фиг.12 представлен выходной сигнал системы обработки для случая, когда величины доплеровской частоты отраженного сигнала и радиального ускорения цели полностью совпадают с частотой настройки доплеровского фильтра и значением радиального ускорения цели, содержащимся в параметрах опорного сигнала. На фиг.13 - выходной сигнал системы обработки для случая, когда величина доплеровского смещения частоты совпадает с частотой настройки доплеровского фильтра, однако значение радиального ускорения отличается от значения радиального ускорения цели, содержащегося в параметрах опорного сигнала, на 5 м/с2 (0,5 g). Соответственно, на фиг.14-16 отличие в значениях радиального ускорения от значения радиального ускорения цели, содержащегося в параметрах опорного сигнала, составляет 10 м/с2 (1g), 15 м/с2 (1,5 g), 20 м/с2 (2 g).
Анализ результатов на фиг.14-16 показывает, что, в принципе, уже при отличии в расстройке значения радиального ускорения от значения радиального ускорения цели, содержащегося в параметрах опорного сигнала 5 м/с2 (0,5 g), может иметь место необнаружение сигнала от интенсивно маневрирующей цели.
Таким образом, для обнаружения интенсивно маневрирующих целей необходимо обеспечить согласованную обработку когерентной пачки радиоимпульсов с линейным изменением несущей частоты от импульса к импульсу, что достигается путем использования предлагаемой системы обнаружения радиолокационных сигналов.
Для выполнения заявленной системы обнаружения может быть использована элементная база, выпускаемая в настоящее время отечественной промышленностью.
Использование изобретения по сравнению с прототипом за счет реализации согласованной обработки отраженного от цели радиолокационного сигнала с линейным изменением несущей частоты позволяет обеспечить высокую вероятность правильного обнаружения и точного оценивания скорости движущихся целей по соответствующему смещению доплеровской частоты для случаев, когда цель перемещается в пространстве как равномерно и прямолинейно с постоянной скоростью, так и при ее движении с ускорением; обеспечивает возможность обнаружения отраженного сигнала при радиолокационном наблюдении интенсивно маневрирующих целей, позволяет уменьшить вероятность принятия ложного решения о помеховом характере отраженного от цели сигнала в том случае, если цель перемещается в пространстве с ускорением.
Проведенное моделирование эффективности функционирования системы обнаружения радиолокационных сигналов от маневрирующих целей показало, что эффективное обнаружение сигнала, отраженного от интенсивно-маневрирующей цели, имеет место только для случая, когда величины доплеровской частоты отраженного сигнала и радиального ускорения цели полностью совпадают с частотой настройки доплеровского фильтра и значением радиального ускорения цели, содержащимся в параметрах опорного сигнала. В то же время уже при отличии в расстройке значения радиального ускорения от значения радиального ускорения цели, содержащимся в параметрах опорного сигнала, на 5 м/с2 (0,5 g) имеет место необнаружение сигнала от интенсивно маневрирующей цели.
Кроме того, предложенные алгоритмы практически не требуют ни повышения быстродействия вычислителей, ни увеличения объема их памяти.











Изобретение может быть использовано в радиолокационных системах контроля и управления воздушным движением. Заявленная система обнаружения радиолокационных сигналов содержит N параллельно соединенных каналов обработки радиолокационных сигналов по дальности, входы которых соединены с выходом приемного устройства, а каждый из N каналов содержит стробирующий каскад, фильтр зоны фильтрации, блок обработки радиолокационного сигнала по ускорению, блок обработки радиолокационного сигнала по скорости, пороговое устройство. Система обнаружения содержит также набор генераторов опорных сигналов, формирующих сигналы с линейно-частотной модуляцией, необходимых для обеспечения согласованной обработки радиолокационных сигналов, отраженных как от целей, перемещающихся равномерно и прямолинейно, так и интенсивно маневрирующих. Достигаемым техническим результатом является обеспечение высокой вероятности правильного обнаружения и точного оценивания скорости движущихся целей по смещению доплеровской частоты для случаев, когда цель перемещается в пространстве как равномерно и прямолинейно с постоянной скоростью, так и при ее движении с ускорением; возможность обнаружения отраженного сигнала при радиолокационном наблюдении интенсивно маневрирующих целей, уменьшение вероятности принятия ложного решения о помеховом характере отраженного от цели сигнала в том случае, если цель перемещается в пространстве с ускорением. 2 з.п. ф-лы, 16 ил.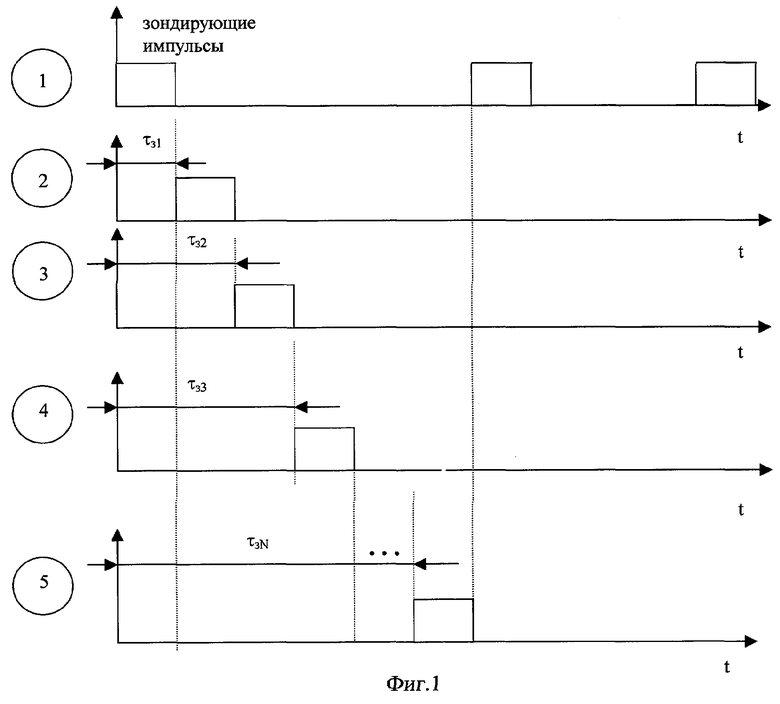
| Многофункциональные радиоэлектронные комплексы истребителей/ Под ред | |||
| Г.С.КОНДРАТЕНКОВА | |||
| М.: Военное изд., 1994, с.51-56, рис.2.1.4 | |||
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С АДАПТИВНЫМ ФИЛЬТРОМ | 1998 |
|
RU2148836C1 |
| ЦИФРОВОЙ БЛОК ОБРАБОТКИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 1995 |
|
RU2080618C1 |
| US 5325098 А, 28.06.1994 | |||
| Способ получения катионообменных смол | 1953 |
|
SU114196A1 |
| US 5107271 А, 21.04.1992 | |||
| СПОСОБ ОПТИМАЛЬНОГО ДОСТУПА К АБДОМИНАЛЬНОМУ ОТДЕЛУ ПИЩЕВОДА ИММУНОДЕФИЦИТНЫХ МЫШЕЙ ПРИ ОРТОТОПИЧЕСКОЙ ТРАНСПЛАНТАЦИИ ФРАГМЕНТА ОПУХОЛИ ПИЩЕВОДА ЧЕЛОВЕКА | 2018 |
|
RU2709835C1 |

