Изобретение относится к беспилотным летательным аппаратам (БЛА), предназначенным для перехвата БЛА-нарушителей. БЛА-перехватчик относится к дистанционно-пилотируемым (беспилотным) летательным аппаратам и обеспечивает прекращение полёта БЛА-нарушителей или их захват и доставку к месту их обезвреживания. БЛА-перехватчик использует наземные и бортовые средства наведения и встроенную в конструкцию корпуса аэродинамическую сеть для перехвата БЛА-нарушителя. Может быть использован для защиты воздушного пространства объектов гражданского и военного назначения.
Технический результат предлагаемого решения заключается в повышении уровня безопасности использования устройства, снижении рисков нанесения ущерба третьим лицам, персоналу и оборудованию защищаемых объектов, улучшении летных характеристик устройства за счет технических и конструктивных решений, позволяющих одновременно с использованием изменения углов оси вращения винтов относительно корпуса использовать аэродинамические свойства сетки с интегрированными в ее структуру аэродинамическими поверхностями, выполненными в форме лепестка. 6 з.п. ф-лы, 7 ил.
Для предотвращения несанкционированных полётов БЛА-нарушителей и их незаконного проникновения в охраняемую зону обычно используются средства создания помех их каналам управления и навигационной аппаратуре (электронное противодействие), средства кинетического или функционального поражения, а также средства прекращения полёта за счёт улавливания развёрнутыми или выстреливаемыми сетями.
Средства первой (патенты РФ 2685509 «Комплекс радиоэлектронной борьбы с беспилотными летательными аппаратами» от 03.04.2018, заявка Великобритании 2576865 «Подавление удалённого объекта» от 09.07.2018, патент РФ 2551821 «Способ борьбы с беспилотными летательными аппаратами ближнего и малого радиуса действия с помощью электромагнитного излучения дециметрового диапазона длин волн» от 30.12.2013, патент РФ 2700207 «Способ функционального подавления беспилотного летательного аппарата», патент РФ 2700206 «Способ двухфакторного функционального подавления беспилотного летательного аппарата») и второй группы (патент РФ 2699148 «Беспилотный летательный аппарат-перехватчик» от 13.02.2018, патент РФ 2669904 «Беспилотный летательный аппарат - перехватчик» от 13.02.2018) приводят к потере управления аппарата, который может упасть в любом месте и причинить значительные повреждения наземным объектам.
К группе средств электронного противодействия можно отнести и средства перехвата управления летательным аппаратом, которые не имеют этого недостатка и позволяют либо вернуть аппарат в пункт вылета, либо обеспечить его посадку в любом выбранном пункте. Однако, к недостаткам этих средств следует отнести сложность задачи вскрытия характеристик сигналов управления, решение которой необходимо для перехвата управления. Кроме того, учитывая возможность использования зашифрованных каналов связи и защищённых навигационных приёмников (Электронный ресурс http://www.vniir-progress.ru/production/navi/malogabaritnaya-adaptivnaya-antennaya-reshetka-serii-kometa/, проверено 14.04.2020), данная задача с большой вероятностью может быть своевременно не решена.
Для поражения несанкционированных БЛА могут использоваться кинетические средства, предусматривающие повреждение БЛА снарядами или ракетами (патенты на изобретение РФ 2700107, 2699148 и 2669904) или разлетающимися при разрыве снаряда поражающими элементами (патент РФ на изобретение 2490585).
Недостатки устройств кинетического поражения БЛА-нарушителя связаны с трудностью их применения в условиях плотной городской застройки и наличия людей на земле, которые могут потенциально находиться в зоне поражения. Кроме того, требуются средства высокоточного наведения аппарата-перехватчика на БЛА-нарушитель для поражения его стрелковым комплексом, что при сложных эволюциях взаимных траекторий сближения аппаратов в пространстве и в ряде случаев проблематично.
Средства третьей группы предусматривают использование развёртываемых сетей, способных пресечь несанкционированный полёт БЛА-нарушителя. Известны различные устройства, позволяющие развернуть сети вокруг летящего БЛА, среди которых заявки Великобритании 2537664, 2548166, патенты ЕПВ 3569969 и США 8205537, заявка США 20100181424, патенты РФ 2497063, RU 2273818, RU 2428649 – так называемые средства запутывания.
В заявках Великобритании 2537664, 2548166 и патенте ЕПВ 3569969 предложены системы, обеспечивающие выброс и развёртывание средств запутывания БЛА-нарушителя и прекращение таким образом его полёта. При размещении данных средств (устройств выбрасывания средств запутывания) на земле недостатком является ограниченность радиуса действия, при размещении на летающем устройстве - сложность размещения на носителе, большие размеры, большая мощность двигателя для буксировки устройства из-за ее большого аэродинамического сопротивления.
Известны различные методы и технические решения обнаружения и поражения БЛА-нарушителей (патенты РФ на изобретения 2700107, 2495359, 2490584, 2490585, 2660998, патенты РФ на полезные модели 72753, 72754, заявка международного бюро ВОИС 2018213575), в которых устройства поражения и прекращения полёта БЛА-нарушителя, управляемые его бортовым процессором, отстреливаются или выбрасываются различными способами: выстреливающей сетью с грузилами, лентами или другими поражающими материалами. Также устройства содержат различные механизмы наведения устройств отстреливания в горизонтальной и вертикальной плоскостях (патент РФ на изобретение 2660998).
Недостатком такого подхода являются: сложность конструкции, большие размеры, высокая стоимость реализации системы обнаружения и прицеливания, низкая вероятность поражения, а также в ряде случаев необходимость для обстрела цели захода сверху или с хвоста.
Наиболее близкой к предлагаемому устройству является система по заявке США 20180105271 «Беспилотная воздушная система-перехватчик» от 21.07.2017. Эта система содержит жёсткую прямоугольную раму, образующую каркас беспилотной системы, исполнительный механизм, установленный на этой раме, и двигатели, установленные на раме по её внешнему контуру. В качестве исполнительного механизма на раме установлена решётка, сформированная из гибких (проволочных) и жёстких (стержневых) элементов, которые обеспечивают запутывание перехваченного БЛА, который затем либо спускается на парашютах, либо транспортируется в заданную точку при помощи БЛА-перехватчика. Размер ячеек решёточных элементов определяется поперечным сечением перехватываемого аппарата и обычно не превышает 1/3 поперечного сечения БЛА-нарушителя. Для управления процессом поиска представляющего угрозу БЛА используется цифровой процессор, принимающий информацию о скоростях и ускорениях перехватываемого БЛА-нарушителя от наземных и/или бортовых датчиков БЛА-перехватчика.
Рассматриваемая система обеспечивает блокирование и буксирование БЛА-нарушителя в безопасное место, однако недостатком конструкции данного БЛА-перехватчика является то, что он предусматривает полет в точку перехвата только за счёт тяги создаваемой пропеллерами, и не предусматривает введение аэродинамических поверхностей. Таким образом, рассматриваемое устройство перехвата не сочетает в себе все преимущества БЛА самолетного типа (планеров) и БЛА типа мультикоптеров (винтокрылых машин).
Рассматриваемая система выбрана в качестве прототипа.
Для устранения этих недостатков предложен беспилотный летательный аппарат-перехватчик, содержащий раму с сеткой, электродвигателями для вращения винтов с возможность изменения положения относительно рамы в пределах от 0 до +/- 90 градусов в двух плоскостях, к элементам ячеек сетки которого прикреплены воздухонепроницаемые поверхности с соответствующим аэродинамическим профилем с возможностью свободного изменения своего положения, открывающие ячейки сетки ортогональным к её поверхности потоком воздуха при взлете и закрывающим ячейки сетки тангенциальным потоком воздуха при горизонтальном полете.
Техническим результатом предлагаемого изобретения «Беспилотный летательный аппарат-перехватчик» является:
- повышение уровня безопасности использования устройства, снижение рисков нанесения ущерба третьим лицам, персоналу и оборудованию защищаемых объектов. Это достигается тем, что БЛА-нарушитель улавливается БЛА-перехватчиком, при этом полностью исключаются деструктивные воздействия на людей, строения и пр.;
- улучшение летных характеристик устройства за счет технических и конструктивных решений, позволяющих одновременно с высокой маневренностью за счет изменения углов оси вращения винтов относительно корпуса использовать аэродинамические свойства сетки с интегрированными в ее структуру аэродинамическими поверхностями, выполненными в форме объемных или плоских лепестков.
Указанный технический результат достигается тем, что беспилотный летательный аппарат-перехватчик содержит сетку на раме круглой или прямоугольной формы с пропеллерами-двигателями, установленными по периметру рамы. Угол наклона пропеллеров относительно корпуса может меняться, обеспечивая повышенную маневренность и возможность ориентации рамы с сеткой ортогонально направлению его полёта в момент выхода БЛА–перехватчика на захват цели. Благодаря специальному креплению, сетка может либо быть натянута по раме во время горизонтального полета, чтобы обеспечивать необходимые аэродинамические характеристики интегрированным аэродинамическим поверхностям, либо быть в момент захвата цели максимально ослабленной, приобретая форму сачка.
Сущность данного изобретения заключается также в том, что сеть в натянутом виде представляет собой мягкое аэродинамическое крыло, пропускающее поток воздуха с одной стороны и не пропускающую с другой, за счет интеграции в ее структуру аэродинамических поверхностей, выполненных в виде лепестков с аэродинамическим профилем. Указанные аэродинамические поверхности представляют собой воздухонепроницаемые лепестки, свободно подвешиваемые к поперечным нитям ячеек сети и обеспечивающие закрытие одной или нескольких ячеек, тангенциальным (продольным корпусу) потоком воздуха. Таким образом, обеспечивается полет, аналогичный аппаратам самолётного типа, мотопаропланам, дельтопланам и пр., что обеспечивает большую дальность и скорость полёта, при этом перехват БЛА – нарушителя обеспечивает необходимый уровень безопасности использования устройства, снижение рисков нанесения ущерба третьим лицам, персоналу и оборудованию защищаемых объектов.
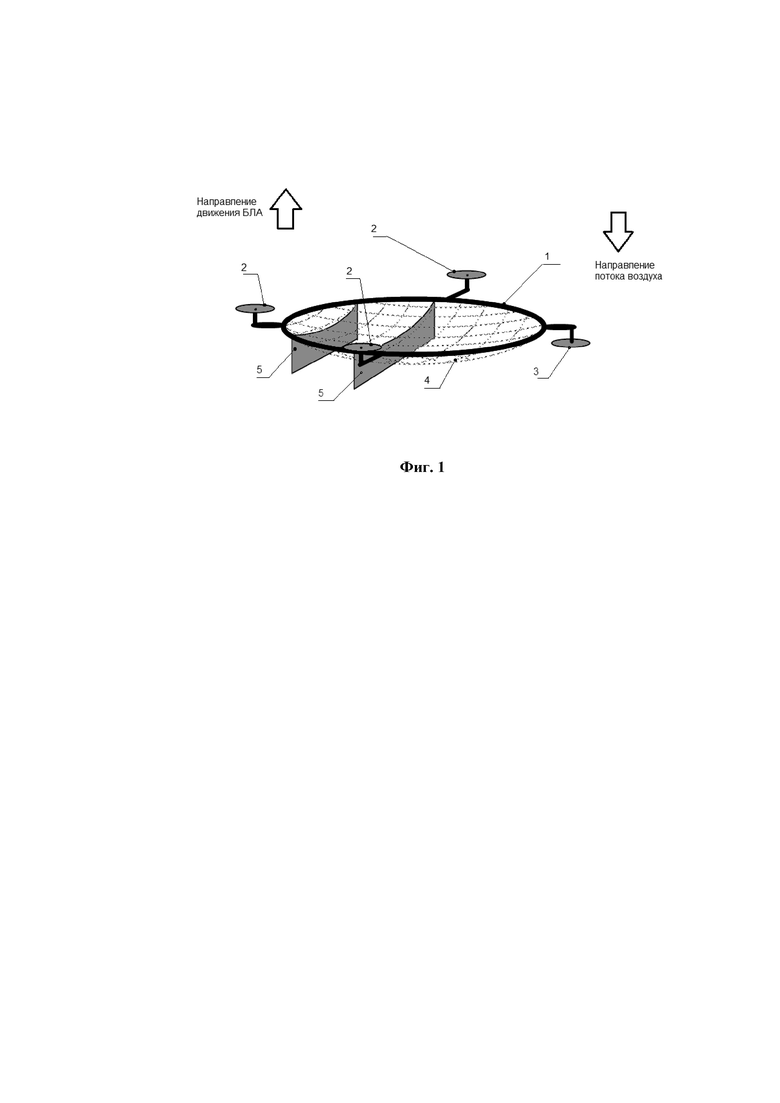
На фиг.1 изображен момент взлета – вертикальный подъем. В данном варианте реализации устройства по внешней стороне корпуса 1 установлены, например, три пропеллера 2, работающие в режиме «тянущего винта», и один 3, работающий в режиме «толкающего винта», все с возможностью изменения угла вращения относительно корпуса. Во время вертикального взлета аэродинамические поверхности 5 сети 4 открыты - поток воздуха проходит сквозь сетку с минимальным сопротивлением.
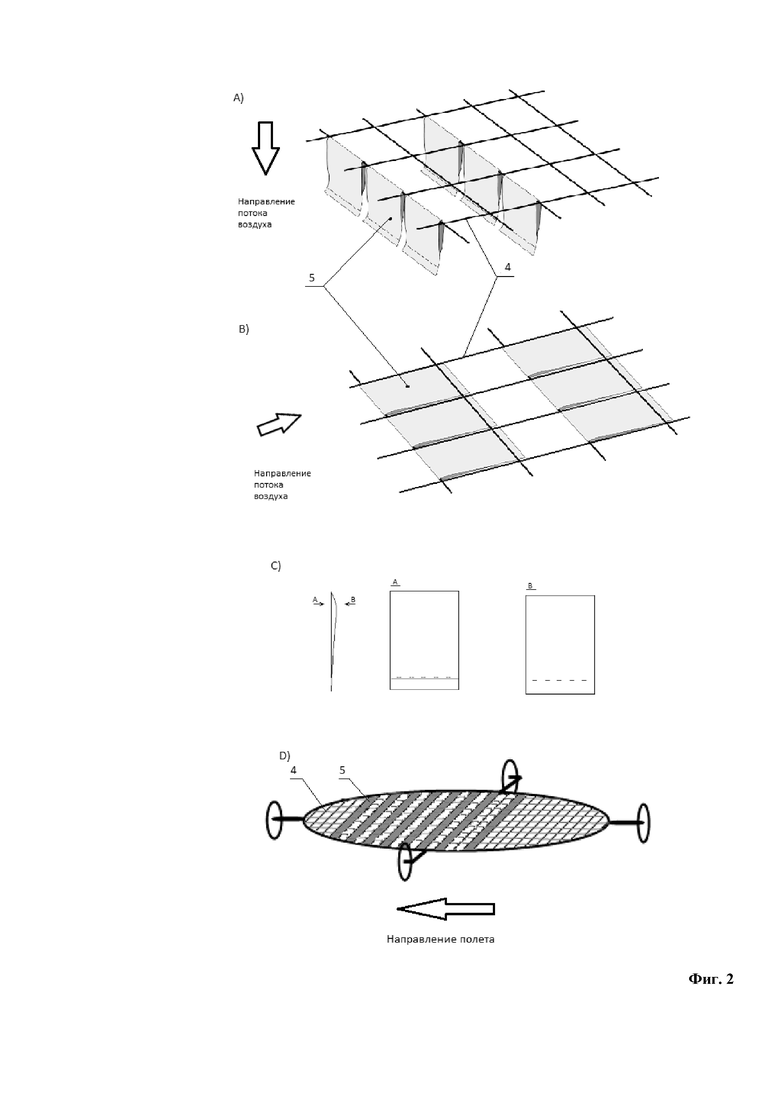
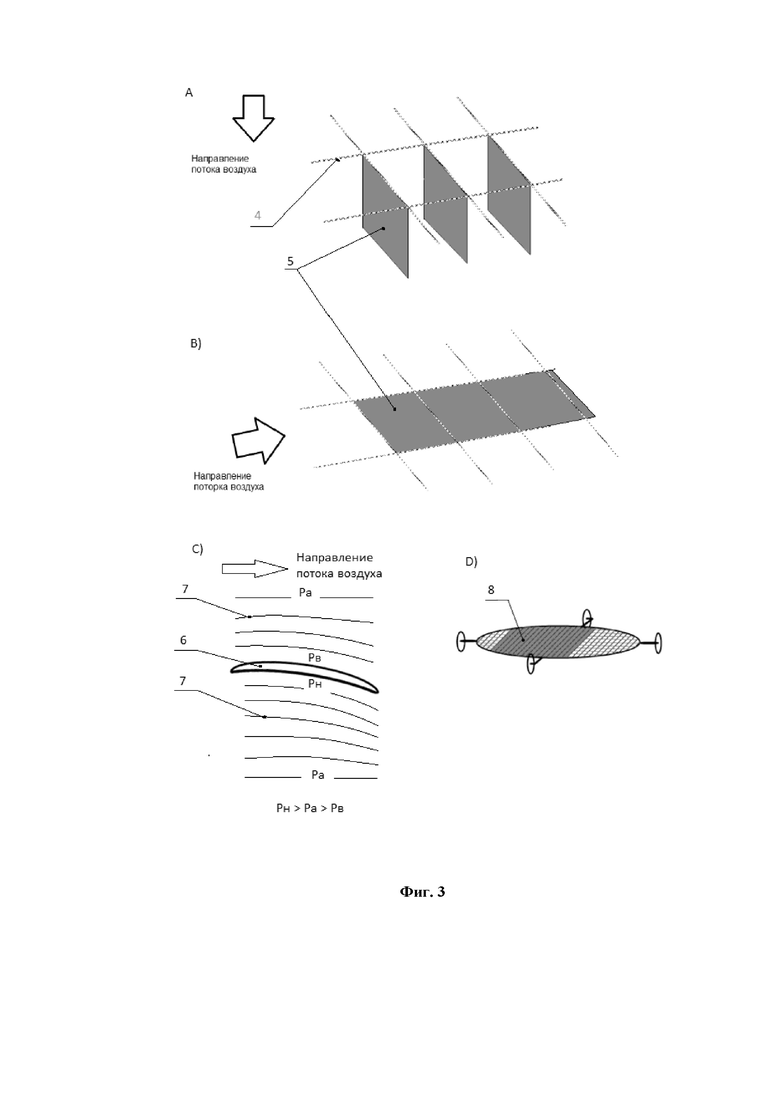
На фиг. 2 и фиг. 3 изображены варианты реализации аэродинамических поверхностей и их интеграция с улавливающей сетью, где один лепесток 5 закрывает одну ячейку сети 4.
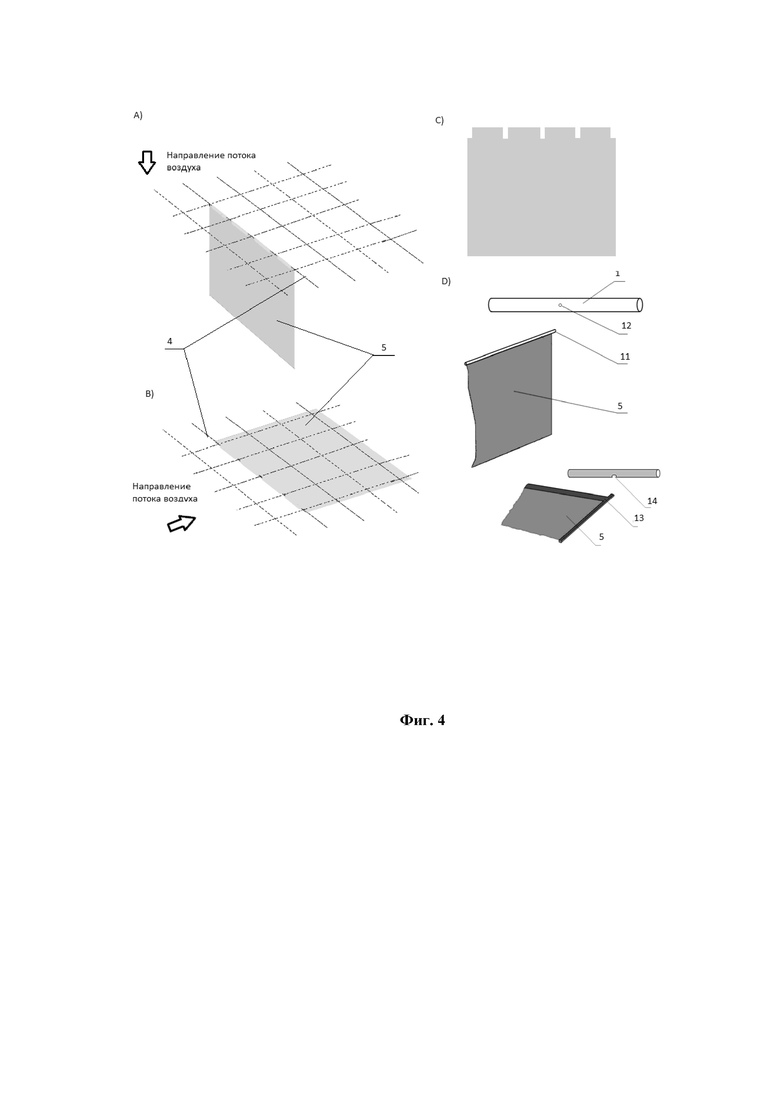
На фиг. 4 изображена аэродинамическая поверхность 5, закрывающая несколько ячеек сети 4.
На фиг. 5 изображен продольный разрез корпуса устройства с элементами крепления и натяжения улавливающей сети.
На фиг. 6 изображено устройство в режиме горизонтального полета – аэродинамические поверхности закрывают ячейки сети 4 потоком воздуха, создаваемым тянущими винтами 2.
На фиг. 7 изображено положение устройства – БЛА перехватчика 1 в момент перехвата цели – БЛА-нарушителя 10. Оси вращения пропеллеров 2, 3 расположены перпендикулярно корпусу, аэродинамические поверхности лепестковой формы 5 ортогональны сети 4 и ее ячейки открыты.
На фиг. 1-7 обозначено:
1- корпус;
2- электродвигатели с пропеллерами в режиме тянущего винта;
3- электродвигатели с пропеллерами в режиме толкающего винта;
4- улавливающая сеть;
5- аэродинамические поверхности;
6- разрез лепестка аэродинамической поверхности;
7- линии воздушного потока;
8- аэродинамическое крыло;
9- угол атаки;
10- цель - БЛА-нарушитель;
11- полимерный стержень;
12- отверстие в раме для крепления стержня;
13- рамка по периметру аэродинамической поверхности;
14- отверстие для фиксации нижней рамки аэродинамической поверхности;
15- отверстия (крепления) для лески (шнура) в корпусе-раме;
16- сетевые петельки для продевания лески и управления натяжением сети;
17- леска или шнур;
18- катушка для сматывания лески (шнура) и управления натяжением сети;
19- автопилот, бортовой вычислитель и средства связи с наземным пунктом управления;
20- средства наведения и сопровождения.
Беспилотный летательный аппарат-перехватчик состоит из рамы - полого корпуса 1, внутри которого размещена аппаратура управления и система энергоснабжения, датчики обнаружения (видеокамеры, радиолокаторы сверхближнего действия, ультразвуковые датчики и пр.), системы связи и передачи информации (фиг.1), по периметру которого установлены не менее двух двигателей с пропеллерами 2, 3. Пропеллеры 2 в носовой и средней части корпуса работают в режиме «тянущего винта». Кормовые пропеллеры 3 двигателей работают в режиме «толкающего винта», причём пропеллеры могут менять угол своей оси вращения относительно корпуса в пределах ± 90 град. в обоих плоскостях.
За счет этого обеспечивается быстрое изменение положения корпуса относительно направления полета. Эта особенность необходима для осуществления перехвата цели – БЛА-нарушителя.
Таким образом, используя подъемную силу пропеллеров 2, 3 (фиг.1), устройство может осуществлять полет, аналогичный всем мультикоптерам – винтокрылым машинам.
Другой особенностью реализации устройства является использование улавливающей сети 4, интегрированной с аэродинамическими поверхностями лепестковой формы 5 из воздухонепроницаемого материала и размещаемой по внутреннему контуру полого корпуса устройства 1 (фиг.1), с помощью которой и осуществляется непосредственно захват и транспортировка БЛА-нарушителя.
В варианте интеграции улавливающей сети с аэродинамическими поверхностями 5 (фиг. 2-A и фиг. 2-B) может быть использован лист из легкого воздухонепроницаемого эластичного материала согнутый так, чтобы нижняя сторона (вид А на фиг. 2-С) была чуть короче верхней. Этим создается объемный аэродинамический профиль поверхностей. Согнутые листы - аэродинамические поверхности 5 - надеваются на поперечные нити сети 4 (фиг. 2-A и фиг. 2-B) так, чтобы короткая сторона листа была низом, длинная верхом, и прошиваются нитью или скрепляются металлическими скрепками, как показано на фиг. 2 виды А и B. Вертикальный размер лепестка должен быть немного больше продольного размера ячейки сети, обеспечивая, таким образом, прижатие аэродинамической поверхности 5 к противоположной поперечной нити сети напором тангенциального потока воздуха (фиг. 2-B).
Группа аэродинамических поверхностей объемной формы (фиг. 2-С) может закрывать весь поперечный ряд сети, однако закрытые аэродинамическими поверхностями 5 ряды должны разделяться не менее чем одним открытым рядом для устранения взаимного влияния (фиг. 2-D).
В другом варианте интеграции сети (фиг. 3, фиг. 4) с воздухонепроницаемыми аэродинамическими поверхностями 5 могут использоваться лепестки с плоским профилем (H. Babinsky, How do wings work? Physics Education 38(6) pp. 497-503, электронный ресурс http://www3.eng.cam.ac.uk/outreach/Project-resources/Wind-turbine/howwingswork.pdf, проверено 14.04.2020). Лепестки представляют собой аэродинамические поверхности 5 из эластичного воздухонепроницаемого материала размером по высоте чуть больше одной ячейки сети 4 (фиг. 3-А и фиг. 3-В). Разрез 6 лепестка аэродинамической поверхности 5 показан на фиг. 3-С. Подъем вызывает форма лепестка, которая изгибает линии воздушного потока 7, создавая более низкое давление на верхней поверхности и более высокое давление на нижней поверхности лепестка, вызывая подъёмную силу (фиг. 3-С). Группа закрытых лепестками ячеек создаёт гибкое аэродинамическое крыло 8, создающее подъёмную силу, необходимую для удержания устройства в воздухе (фиг. 3-D).
Аэродинамическая поверхность 5 может закрывать несколько ячеек сети 4 (фиг. 4-A и фиг. 4-B). На фиг. 4-C показан контур аэродинамической поверхности, верхняя часть которой крепится вокруг поперечной нити сети 4 и прошивается обычным образом. Возможно одновременное крепление аэродинамической поверхности 5 непосредственно к раме (фиг. 4-D) с помощью, например, полимерного стержня 11, вставляемого в специальное отверстие 12 на раме 1. Аэродинамическая поверхность – гибкое крыло, выполненное, например, из парашютного шёлка, может иметь по периметру рамку 13 как у «воздушных змеев». Перед вылетом аэродинамическая поверхность может фиксироваться в горизонтальном положении с помощью клипс, кнопок или крепления нижнего ребра рамки гибкого крыла с помощью специального 14 «омегообразного» отверстия и при выходе устройства на захват цели высвобождаться встречным потоком воздуха.
К корпусу-раме 1 сеть 4 может крепиться следующим образом (фиг. 5): в корпусе присутствуют специальные отверстия (или крепления, далее по тексту – отверстия) 15, а по краю сети соответствующие им петельки 16. Через отверстия рамы и сетевые петельки продеты леска или шнур 17 (далее по тексту – леска), обладающие достаточными прочностными качествами, таким образом, чтобы леска могла легко двигаться при увеличении или уменьшении ее длины. Длина лески должна превышать длину периметра рамы на такую величину, чтобы обеспечить необходимую форму сачка при захвате БЛА-нарушителя. В корпусе-раме 1 также устанавливается автоматическая катушка 18, в которую заправляется избыточная по отношению к длине периметра рамы длина лески и которая по команде наземного пункта управления или собственного бортового вычислителя БЛА-перехватчика может либо размотать, либо смотать леску на ее избыточную длину. Во время взлета, посадки, или непосредственно полета леска находится в натянутом состоянии, обеспечивая необходимую жесткость для изгиба аэродинамических поверхностей под напором воздушного потока и создания соответствующей подъемной силы. Когда БЛА-перехватчик начинает захват цели, автоматическая катушка удлиняет леску, ранее натянутая сеть провисает и встречный поток воздуха превращает ее в сачок и открывает закрытые аэродинамическими поверхностями ячейки. При необходимости вернуться к маневрированию, автоматическая катушка по команде бортового вычислителя наматывает избыток длины лески, тем самым вновь натягивая сеть.
При горизонтальном полете (фиг. 6) встречным потоком воздуха аэродинамическим крылом 8 из одного либо группы лепестков, закрывающих ячейки сети 4, создаётся подъёмная сила, удерживающая устройство в воздухе. Пропеллер 2 создаёт дополнительный обдув, обеспечивающий прижатие лепестков крыла 8 к сети 4.
Особенностью использования аэродинамических поверхностей с плоским профилем может быть то, что изгиб эластичного лепестка при встречном воздушном напоре будет определяться натяжением и размером сети и, таким образом, с изменением натяжения сети будет меняться кривизна крыла и, соответственно, создаваемая им подъемная сила.
Меняя угол атаки 9 и используя изменяемую подъемную силу прижатых к сети лепестков, устройство может осуществлять полет, аналогичный мотопаропланам и дельтопланам, т.е. летательным аппаратам самолётного типа, обладающим лётными преимуществами перед винтокрылами машинами в части экономичности затрачиваемой энергии на полет. Таким образом, обеспечивается большая по сравнению с ними скорость и дальность полёта.
Аэродинамическая сеть как исполнительный механизм перехвата цели может быть выполнена в виде сменного элемента, вставляемого в корпус устройства. При этом ее конструкция аналогична приведённой на фиг.1 , с той лишь разницей, что ее корпус не содержит элементов системы управления, энергоснабжения и пр., а представляет собой только элементы крепления улавливающей сети с аэродинамическими поверхностями.
Работа устройства «Беспилотный летательный аппарат-перехватчик» осуществляется следующим образом.
Команда на взлет БЛА-перехватчику выдается наземным комплексом мониторинга воздушного пространства защищаемого объекта при обнаружении БЛА-нарушителя. Приняв по каналам радиосвязи соответствующею команду, БЛА – перехватчик осуществляет взлёт (фиг.1) и по командам наведения от сопряженного наземного пункта управления, используя автопилот, бортовой вычислитель и средства связи 19 (фиг.7), направляется в расчётную точку встречи с БЛА-нарушителем, реализуя один из известных методов командного наведения (Радиосистемы управления: учебник для вузов / под ред. В. А. Вейцеля. – М.: Дрофа, 2005. – 416 с).
После достижения заданной точки пространства устройство осуществляет поиск, обнаружение и сопровождение цели, используя соответствующие бортовые средства обнаружения 20 (фиг.7). Одновременно, используя средства связи, по радиоканалу на наземный пункт управления передается изображение цели. После принятия решения наземным пунктом управления или собственным бортовым вычислителем о пресечении полёта обнаруженного БЛА-нарушителя, производится захват цели 10. Маневр по захвату цели 10 производится либо под управлением бортового вычислителя, либо по командам от наземного пункта управления.
После перехвата БЛА-нарушитель 10 доставляется устройством в заданную наземным пунктом управления точку пространства.
Реализация изобретения позволяет вести борьбу с дистанционно пилотируемыми беспилотными летательными аппаратами по защите воздушного пространства от незаконного использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство перехвата беспилотных летательных аппаратов | 2020 |
|
RU2738383C2 |
| Способ противодействия беспилотным летательным аппаратам | 2020 |
|
RU2743401C1 |
| Способ и устройство противодействия беспилотным летательным аппаратам | 2023 |
|
RU2818398C1 |
| Беспилотный летательный аппарат-перехватчик | 2024 |
|
RU2825353C1 |
| Зенитная управляемая ракета | 2024 |
|
RU2837930C1 |
| Беспилотный летательный аппарат - перехватчик | 2018 |
|
RU2669904C1 |
| Зенитная управляемая ракета | 2024 |
|
RU2837439C1 |
| СИСТЕМА И СПОСОБ ПРЕДОТВРАЩЕНИЯ НАРУШЕНИЙ ПРАВИЛ ПОЛЕТОВ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2018 |
|
RU2701421C1 |
| Устройство аэродинамического подъема полезной нагрузки | 2021 |
|
RU2765196C2 |
| Беспилотное воздушное судно-перехватчик | 2024 |
|
RU2840166C1 |
Изобретение относится к беспилотным летательным аппаратам (БЛА), предназначенным для перехвата БЛА-нарушителей. Беспилотный летательный аппарат-перехватчик состоит из корпуса, выполненного в виде рамы, по периметру которой размещены не менее двух двигателей с изменяющимися углами вращения, часть из которых работают в режиме «тянущего винта», а часть в режиме «толкающего винта», средств наведения и сопровождения, автопилота, бортового вычислителя, средств связи с наземным пунктом управления. В полое пространство рамы интегрирована аэродинамическая структура, состоящая из улавливающей сети. Сеть оснащена воздухонепроницаемыми аэродинамическими поверхностями с соответствующими аэродинамическими профилями, способными открывать ячейки сети ортогональным к её поверхности потоком воздуха и закрывать их тангенциальным потоком воздуха. Обеспечивается улучшение летных характеристик устройства. 5 з.п. ф-лы, 7 ил.
1. Беспилотный летательный аппарат-перехватчик, состоящий из корпуса, выполненного в виде рамы, по периметру которой размещены не менее двух двигателей с изменяющимися углами вращения, часть из которых работают в режиме «тянущего винта», а часть в режиме «толкающего винта», средств наведения и сопровождения, автопилота, бортового вычислителя, средств связи с наземным пунктом управления, отличающийся тем, что в полое пространство рамы интегрирована аэродинамическая структура, состоящая из улавливающей сети, оснащенной воздухонепроницаемыми аэродинамическими поверхностями с соответствующими аэродинамическими профилями, способными открывать ячейки сети ортогональным к её поверхности потоком воздуха и закрывать их тангенциальным потоком воздуха, обеспечивая подъёмную силу при продольном плоскости корпуса полете.
2. Беспилотный летательный аппарат-перехватчик по п.1, отличающийся тем, что размер и поверхностное натяжение аэродинамической структуры имеют изменяющееся значение от обеспечивающего удержание аэродинамических поверхностей и аэродинамический подъем устройства до обеспечивавшего удержание цели при ее захвате сетью.
3. Беспилотный летательный аппарат-перехватчик по п.1, отличающийся тем, что аэродинамические поверхности выполнены из эластичного воздухонепроницаемого материала, верхняя сторона которых крепится к поперечным нитям ячеек сети таким образом, чтобы противоположная часть свободно свисала под собственной тяжестью.
4. Беспилотный летательный аппарат-перехватчик по п.1, отличающийся тем, что аэродинамические поверхности, закрывающие больше одной ячейки сети, выполнены из гибкого материала в виде крыла, имеющего по двум боковым и нижней сторонам рамку из жесткого негибкого материала, обеспечивающую крылу необходимый аэродинамический профиль.
5. Беспилотный летательный аппарат-перехватчик по п.1, отличающийся тем, что воздухонепроницаемые аэродинамические поверхности, закрывающие больше одной ячейки сети, выполнены в виде гибкого крыла, имеющего в нижней части крепление, которое фиксируют лепесток аэродинамической поверхности в продольном корпусу положении таким образом, что под ортогональным воздушным напором крепление освобождает фиксацию нижней части крыла, и ячейки сети открываются для прохода воздуха.
6. Беспилотный летательный аппарат-перехватчик по п.1, отличающийся тем, что натяжение сети регулируется поворотом автоматической катушки, при котором изменяется длина лески, натянутой по периметру рамы и удерживающей сеть с аэродинамическими поверхностями.
| Многоцелевой БПЛА-перехватчик | 2020 |
|
RU2723203C1 |
| Указатель уровня жидкости резервуарах | 1932 |
|
SU30845A1 |
| Способ противодействия выполнению задач беспилотному летательному аппарату | 2018 |
|
RU2679377C1 |
| WO 2020072801 A1, 09.04.2020 | |||
| WO 2020072808 A1, 09.04.2020. | |||

