Изобретение относится к области робототехники, а именно к робототехническим средствам, комплексам и системам военного назначения: способам и системам доставки грузов в места ведения боевых действий.
Из предшествующего уровня развития техники известен способ доставки грузов в места ведения боевых действий по патенту RU 2533229, МПК В 25J 5/00, от 10.01.2013 г., основанный на применении мобильного робототехнического комплекса и включающий транспортирование грузов в места ведения боевых действий в транспортном модуле мобильного робототехнического комплекса с использованием оператором дистанционного пульта управления.
При несомненных достоинствах данного способа, принимаемого за прототип, он имеет низкую эффективность доставки грузов в места ведения боевых действий и ограниченную область применения, связанные с отсутствием возможностей по обеспечению надежной транспортировки грузов в различных условиях ведения боевых действий, особенно при ведения боевых действий на открытой местности или в городских условиях, и по обеспечению автоматизированной погрузки и разгрузки грузов.
Задача, решаемая предлагаемым изобретением, заключается в повышении эффективности доставки грузов в места ведения боевых действий и расширении области применения способа за счет достижения следующих полезных технических результатов:
обеспечивается возможность надежной транспортировки грузов в различных условиях ведения боевых действий, особенно на открытой местности или в городских условиях;
обеспечивается возможность автоматизированной погрузки и разгрузки грузов с применением оператором дистанционного пульта управления.
Сущность изобретения, обеспечивающая достижение указанных технических результатов, заключается в следующем.
В способе доставки грузов в места ведения боевых действий путем их транспортирования в транспортном модуле мобильного робототехнического средства с использованием оператором дистанционного пульта управления первую часть грузов, крайне необходимых для ведения боевых действий, размещают на транспортной платформе малогабаритного робототехнического средства, вторую часть грузов загружают в транспортный модуль мобильного робототехническим средства и затем в транспортный модуль загружают малогабаритное робототехническое средство, грузы и малогабаритное робототехническое средство транспортируют мобильным робототехническим средством и выгружают их в месте назначения, причем при невозможности дальнейшего движения мобильного робототехнического комплекса по условиям ведения боевых действий из него выгружают малогабаритное робототехническое средство и на нем транспортируют первую часть грузов к месту назначения, а при появлении возможностей по возобновлению движения мобильного робототехнического средства им транспортируют вторую часть грузов и выгружают их из него в месте назначения, причем управление движением мобильного робототехнического средства осуществляют водителем с использованием органов управления движением мобильного робототехнического средства, а в районе ведения боевых действий - оператором с использованием дистанционного пульта управления, управление движением малогабаритного мобильного робототехнического средства, погрузку в транспортный модуль и выгрузку из него грузов, в том числе и малогабаритного мобильного робототехнического средства, осуществляют оператором с использованием дистанционного пульта управления.
Обозначенная сущность изобретения связана с достижением заявленного технического результата следующим образом соответственно.
1. Введение в известный способ доставки грузов в места ведения боевых действий новых взаимосвязанных действий над грузами, а именно: первую часть грузов, крайне необходимых для ведения боевых действий, размещают на транспортной платформе малогабаритного робототехнического средства, вторую часть грузов загружают в транспортный модуль мобильного робототехническим средства и затем в транспортный модуль загружают малогабаритное робототехническое средство, грузы и малогабаритное робототехническое средство транспортируют мобильным робототехническим средством и выгружают их в месте назначения, причем при невозможности дальнейшего движения мобильного робототехнического комплекса по условиям ведения боевых действий из него выгружают малогабаритное робототехническое средство и на нем транспортируют первую часть грузов к месту назначения, а при появлении возможностей по возобновлению движения мобильного робототехнического средства им транспортируют вторую часть грузов и выгружают их из него в месте назначения, причем управление движением мобильного робототехнического средства осуществляют водителем с использованием органов управления движением мобильного робототехнического средства, а в районе ведения боевых действий -оператором с использованием дистанционного пульта управления позволяет обеспечить возможности по надежной транспортировке грузов в различных условиях ведения боевых действий, особенно на открытой местности или в городских условиях;
Кроме того, автоматизированная погрузка и разгрузка грузов с применением оператором дистанционного пульта управления позволяет обеспечить защиту и исключение потерь обслуживающего персонала, а, также, повысить оперативность проведения погрузочно-разгрузочных работ.
2. Повышение эффективности доставки грузов в места ведения боевых действий и расширение области применения способа обеспечивается за счет возможностей по надежной транспортировке грузов в условиях ведения боевых действий, особенно на открытой местности или в городских условиях, и по автоматизированной погрузке и разгрузке грузов с применением оператором дистанционного пульта управления (см. п. 1).
Сущность предлагаемого способа заключается в следующем.
Первую часть грузов, крайне необходимых для ведения боевых действий, например, боеприпасы, медикаменты, источники питания, воду, продовольствие в транспортной таре размещают на транспортной платформе малогабаритного робототехнического средства, а вторую часть грузов, например, боеприпасы, горюче-смазочные материалы, запасные части и инструмент к вооружению и военной техники в транспортной таре загружают в транспортный модуль мобильного робототехническим средства с использованием оператором дистанционного пульта управления.
В последнюю очередь в транспортный модуль загружают малогабаритное робототехническое средство с размещенными на нем грузами с использованием оператором дистанционного пульта управления.
Затем грузы и малогабаритное робототехническое средство транспортируют мобильным робототехническим средством и выгружают их в месте назначения с использованием оператором дистанционного пульта управления, причем управление движением мобильного робототехнического средства осуществляют водителем с использованием органов управления движением мобильного робототехнического средства, а в районе ведения боевых действий, например, в ситуациях, при которых возможна гибель экипажа - оператором с использованием дистанционного пульта управления.
При этом при невозможности дальнейшего движения мобильного робототехнического комплекса по условиям ведения боевых действий, например, при ведении боевых действий на открытой местности при применении противником интенсивного огневого воздействия или в городских условиях при невозможности проезда по улицам города из него выгружают малогабаритное робототехническое средство и на нем транспортируют первую часть грузов к месту назначения, а при появлении возможностей по возобновлению движения мобильного робототехнического средства им транспортируют вторую часть грузов и выгружают их из него в месте назначения с использованием оператором дистанционного пульта управления, причем управление движением мобильного робототехнического средства осуществляют водителем с использованием органов управления движением мобильного робототехнического средства, а в районе ведения боевых действий, например, в ситуациях, при которых возможна гибель экипажа - оператором с использованием дистанционного пульта управления.
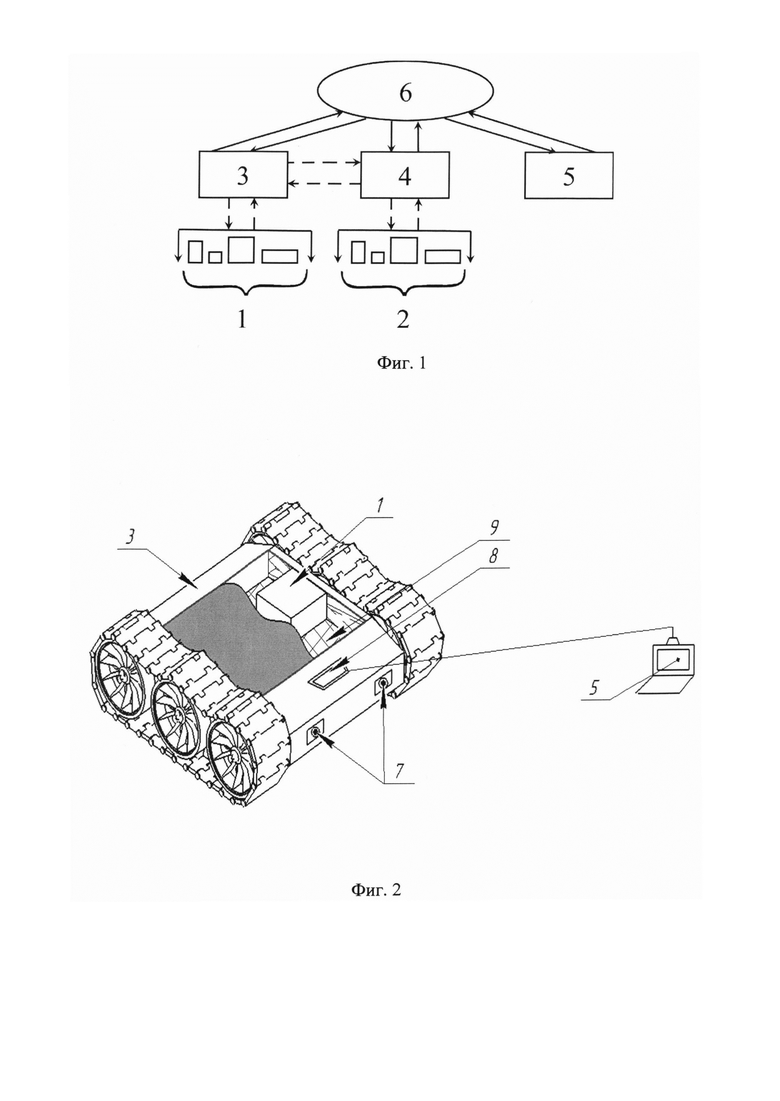
Реализация предлагаемого способа доставки грузов в места ведения боевых действий и система его осуществления схематично представлены на Фиг. 1, где (1) - первая часть грузов, крайне необходимых для ведения боевых действий, (2) - вторая часть грузов, (3) - малогабаритное робототехническое средство, (4) - мобильное робототехническое средство, (5) - пульт дистанционного управления, (6) - сеть передачи данных.
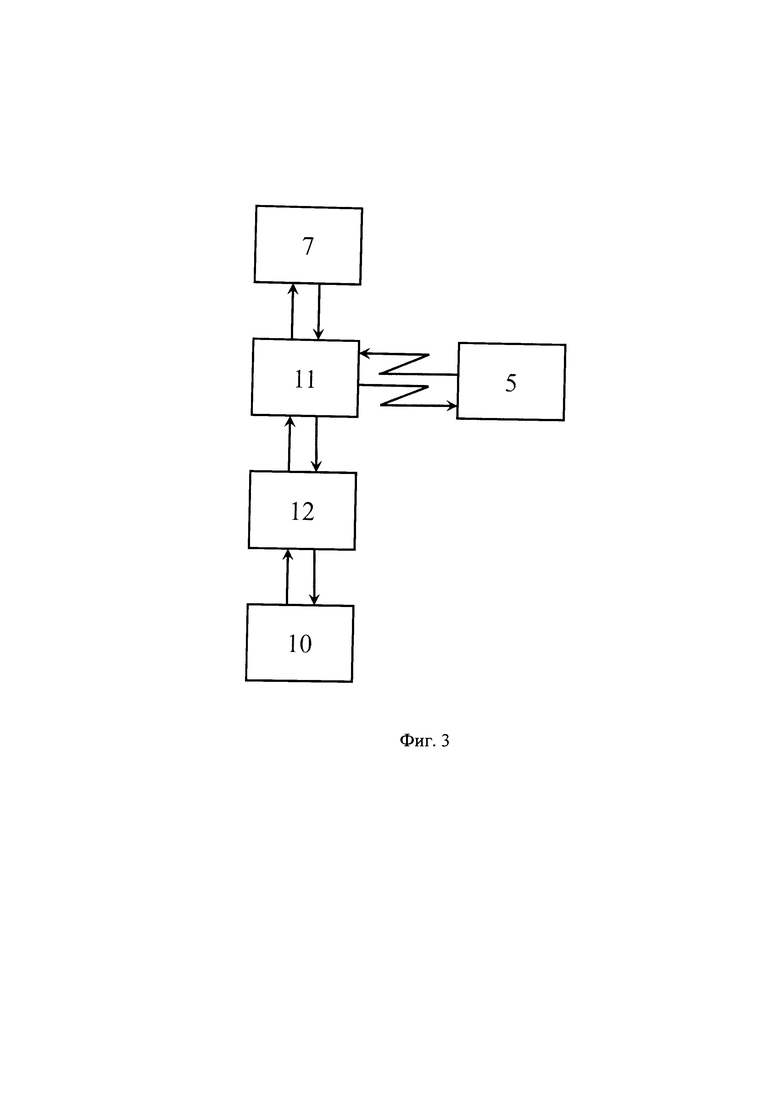
Устройство малогабаритного мобильного робототехнического средства (3) поясняется чертежами, где на фиг. 2 представлен общий вид малогабаритного мобильного робототехнического средства, на фиг. 3 - структурная схема малогабаритного мобильного робототехнического средства.
Малогабаритное мобильное робототехническое средство (3) выполнено в виде дистанционно управляемого транспортного средства повышенной проходимости, на корпусе которого размещены видеокамеры (7), антенна (8), транспортная платформа (9), на которой размещены грузы (1), а внутри корпуса смонтированы электрический привод движителя (10), дистанционная система связи и передачи данных (11), связанная по каналу радиообмена с пультом дистанционного управления (5) и электрически связанная с видеокамерами (7), блок управления (12), электрически связанный с электрический приводом движителя (10) и дистанционной системой связи и передачи данных (11), бортовые источники электропитания (на рисунке не показаны).
Видеокамеры (7) предназначены для передачи видеоизображения местности в дневное (ночное) время на пульт дистанционного управления (5) посредством дистанционной системы связи и передачи данных (11) и могут быть выполнены в виде цифровых видеокамер с подсветкой в инфракрасном диапазоне электромагнитных волн.
Блок управления (12) предназначен для обработки информации, поступающей от дистанционной системы связи и передачи данных (11), обеспечения управления видеокамерами (7) и электрическим приводом движителя (10) может быть выполнен в виде процессора (компьютера).
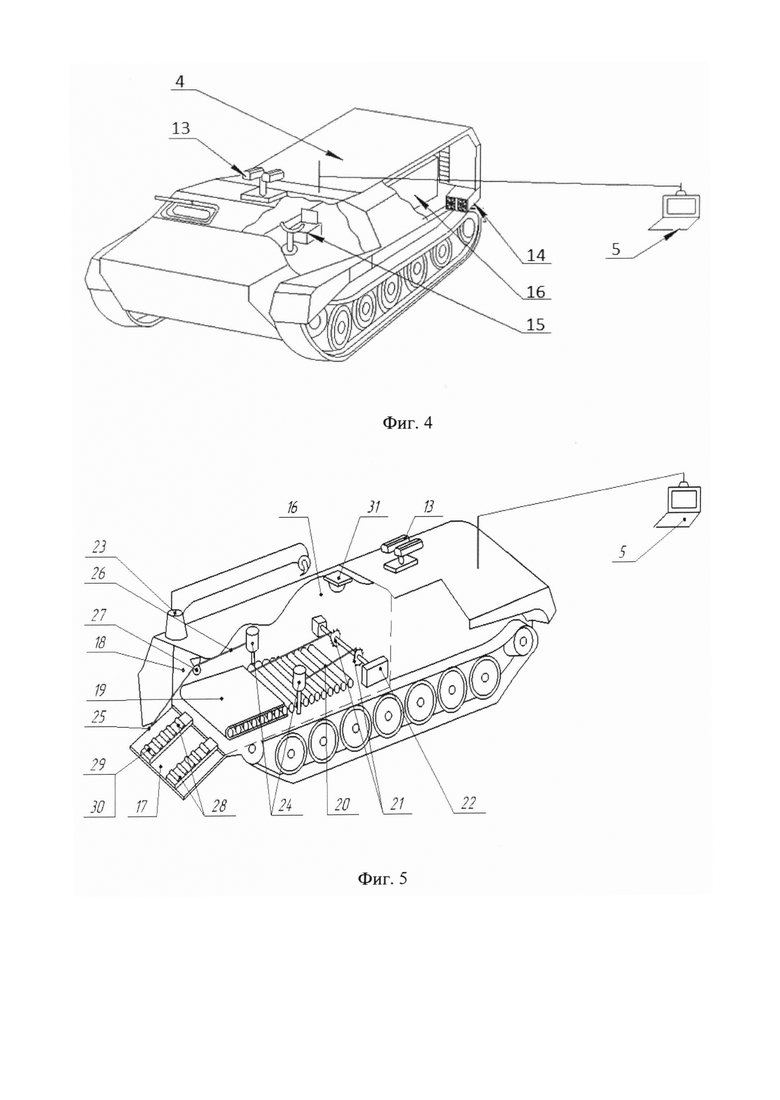
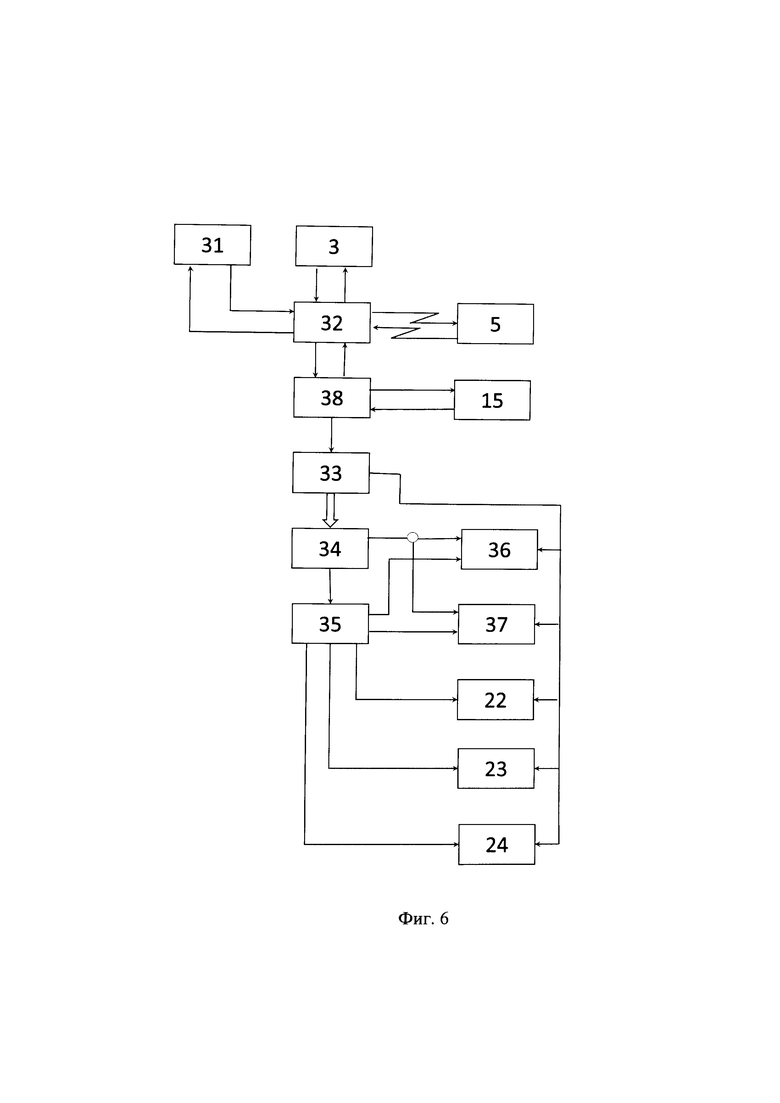
Устройство мобильного робототехнического средства 4 поясняется чертежами, где на фиг. 4 представлен общий вид мобильного робототехнического средства, на фиг. 5 - общий вид кузова мобильного робототехнического средства, а на фиг. 6 - структурная схема мобильного робототехнического средства.
Мобильное робототехническое средство 4 выполнено в виде управляемого транспортного средства повышенной проходимости, на корпусе которого размещены видеокамеры наружного наблюдения (13) и два водомета (14), а внутри корпуса смонтированы автоматизированное место водителя (15); транспортный модуль (16), внутри которого размещены задний откидной борт (17), другие составные корпусные части (18), встроенный специальный реверсивный ленточный транспортер (19), разомкнутые концы ленты которого соединены цепями (20), охватывающие звездочки (21), насаженные на вал электропривода (22), манипулятор с захватным устройством (23), закрепленный на внешней стороне верхней части корпуса мобильного робототехнического средства (4), два электропривода перемещения заднего откидного борта (24), установленными на полу в задней части транспортного модуля, два кронштейна (25), закрепленными на внутренней стороне заднего откидного борта (17) и имеющими кинематические связи с валами электроприводов (24) посредством двух тросов (26) и двух роликов (27), установленными в задней части транспортного модуля на внутренних боковых сторонах корпуса модуля, две силовые балки (28), закрепленными на внутренней стороне заднего откидного борта (17) параллельно его боковым сторонам, ролики (29) с подшипниками (30), втулки которых установлены рядами на одинаковом расстоянии друг от друга на силовых балках (28), видеокамера (31); дистанционная система связи и передачи данных (32), связанная по каналу радиообмена с пультом дистанционного управления (5) и электрически связанная с видеокамерами наружного наблюдения (13) и видеокамерой (31); оптоволоконный кабель (на рисунке не показан), электрически связанный с пультом дистанционного управления (5) и дистанционной системой связи и передачи данных (32); двигатель внутреннего сгорания (33) с электрогенератором (34); бортовые источники электропитания (35); электрический привод движителя (36) и электродвигатели водометов (37) электрически связанные с электрогенератором (34) и бортовыми источниками электропитания (35); блок управления (37), электрически связанный с органами управления, приборами индикации автоматизированного места водителя (15), двигателем внутреннего сгорания (33), бортовыми источниками электропитания (35), электрическим приводом движителя (36), электродвигателями водометов (37), электроприводом транспортера (22), манипулятор с захватным устройством (23), электроприводами перемещения заднего откидного борта (24), при этом электропривод транспортера (22), манипулятор с захватным устройством (23), электроприводы перемещения заднего откидного борта (24) имеют электрическую связь с бортовыми источниками электропитания (35) и имеют возможность управления с использованием пульта дистанционного управления (5) посредством дистанционной системы связи (32), блока управления (37) по радиоканалу связи, например, по защищенному радиоканалу связи.
Мобильное робототехническое средство 4 выполнено в виде вездехода-амфибии с движителем на гусеничном ходу повышенной проходимости и двумя водометами (14) для обеспечения движения по водной поверхности, при этом корпус вездехода амфибии выполнен из пуленепробиваемого материала, например материала, который обеспечивает защиту от пуль калибра 7, 62 мм.
Видеокамеры (13) и (31) предназначены соответственно для передачи видеоизображения местности в дневное (ночное) время и внутреннего объема транспортного модуля (16) на пульт дистанционного управления (5) посредством дистанционной системы связи и передачи данных (32) и могут быть выполнены в виде цифровых видеокамер с подсветкой в инфракрасном диапазоне электромагнитных волн.
Автоматизированное место водителя (15) смонтировано внутри корпуса мобильного робототехнического средства (4) и предназначено для управления транспортным средством водителем на безопасных участках движения и имеет в своем составе органы управления движением и приборы индикации.
В качестве силовой установки используется двигатель внутреннего сгорания (33) с электрогенератором (34).
Электрический привод движителя (36) и электродвигатели водометов (37) имеют возможность работы, как от электрогенератора (34), так и от бортовых источников электропитания (35).
Блок управления (38) предназначен для обработки информации, поступающей от дистанционной системы связи и передачи данных (32) и органов управления, размещенных на автоматизированном месте механика-водителя (15), обеспечения управления видеокамерами (13) и (31), двигателем внутреннего сгорания (33), бортовыми источниками электропитания (35), электрическим приводом движителя (36), электродвигателями водометов (37), электроприводом транспортера (22), манипулятором с захватным устройством (23), электроприводами перемещения заднего откидного борта (24) и может быть выполнен в виде процессора (компьютера).
Транспортный модуль (16) смонтирован внутри мобильного робототехнического средства 4 и имеет возможность погрузки, разгрузки и транспортирования грузов.
Манипулятор с захватным устройством (23) имеет три степени свободы, с возможностью вращения в горизонтальной плоскости на 180 градусов.
Манипулятор может двигаться в вертикальном направлении на 100 градусов и вниз на 80 градусов относительно корпуса. Манипулятор имеет возможность управления по отдельным степеням подвижности с плавной регулировкой скорости движения. Скорость движения пропорциональна углу отклонения рукоятки управления, размещенной на пульте дистанционного управления (5).
Пульт дистанционного управления (5) предназначен для управления движением робототехнических средств (3) и (4), проведением погрузочно-разгрузочных работ мобильным робототехническим средством (4) и может быть выполнен в виде интегрированной системы, включающей в себя приемник и передатчик радиосигналов, органы управления движением робототехнических средств и проведения погрузочно-разгрузочных работ и панель отображения движения робототехнических средств на местности и проведения погрузочно-разгрузочных работ в транспортном модуле (16) мобильного робототехнического средства (4).
При этом управление движением и проведением погрузочно-разгрузочных работ мобильным робототехническим средством (4) может осуществляться, как по радиоканалу, например, защищенному каналу радиосвязи, так и посредством передачи электрических сигналов по оптоволоконному кабелю.
Сеть передачи данных (6) предназначена для обмена управляющими информационными сигналами между пультом дистанционного управления (5) и малогабаритным мобильным робототехническим комплексом (3), а также робототехническим комплексом (4), и может быть выполнена, например, в виде сети коммутируемых или выделенных каналов связи.
Предложенный способ доставки грузов в места ведения боевых действий и система для его осуществления реализуются следующим образом.
Первую часть грузов (1) размещают на транспортной платформе (9) малогабаритного робототехнического средства (3).
Затем вторую часть грузов (2) загружают в транспортный модуль (16) мобильного робототехническим средства (4) с использованием оператором дистанционного пульта управления (5) через сеть передачи данных (6). При этом оператор с использованием органов управления (на рисунке не показаны), размещенных на устройстве дистанционного управления (5), последовательно осуществляет следующие действия:
- включает в работу видеокамеру (31). При этом происходит формирование видеоизображения внутреннего объема транспортного модуля (16) на панели дистанционного пульта управления;
- включает в работу электроприводы перемещения заднего откидного борта (24), которые ослабляют тяговые усилия, приложенные к кронштейнам (25) через кинематические связи, образованные тросами (26) и роликами (27), с валами электроприводов перемещения заднего откидного борта (24). При этом происходит опускание заднего откидного борта (17);
- выключает электроприводы перемещения заднего откидного борта (24) при установке борта в горизонтальное положение;
- устанавливает груз на внутреннюю поверхность заднего откидного борта (17) с использованием манипулятора с захватным устройством (23);
- включает в работу электроприводы перемещения заднего откидного борта (24), которые создают тяговые усилия, приложенные к кронштейнам (25) через кинематические связи, образованные тросами (26) и роликами (27), с валами электроприводов перемещения заднего откидного борта (24). При этом происходит поднимание заднего откидного борта (17). В результате груз перемещается по роликам (29) на ленточный транспортер (19);
- выключает электроприводы перемещения заднего откидного борта (24) при установке груза на ленточный транспортер (19);
- включает электропривод (22) ленточного транспортера (19). При этом груз начинает перемещаться по транспортеру;
- выключает электропривод (22) ленточного транспортера (19) при подходе груза к краю транспортера.
- включает в работу электроприводы перемещения заднего откидного борта (24) и выключает их при закрытии борта.
Аналогичным образом осуществляется погрузка и других грузов (2), а случае невозможности проведения автоматизированного проведения погрузочно-разгрузочных работ грузы (2) загружают на ленточный транспортер (19) вручную без использования манипулятора с захватным устройством (23) и электроприводов перемещения заднего откидного борта (24).
В последнюю очередь загружают малогабаритное робототехническое средство (3) в транспортный модуль (16) мобильного робототехнического средства (4) путем его перемещения по заднему откидному борту (17) до ленточного транспортера (19) с использованием пульта дистанционного управления (5) или вручную.
В случае необходимости проведения погрузочно-разгрузочных работ с малогабаритными грузами они предварительно штабелируются в контейнеры или другие устройства, предназначенные для штабелирования грузов.
Перед началом движения мобильного робототехническим средства (4) водитель, используя органы управления, размещенные на автоматизированном месте водителя (15), посредством блока управления (38) включает в работу двигатель внутреннего сгорания (33). При этом электрогенератор (34) начинает вырабатывать электрическую энергию, которая поступает на электрический привод движителя (36) и бортовые источники электропитания (35). Затем водитель включает в работу электрический привод движителя (36) и мобильное робототехническое средство (4) начинает движение.
В случае необходимости преодоления водных преград водитель включает в работу электродвигатели водометов (37).
На участках движения, которые представляют опасность для жизни водителя, например в районе ведения боевых действий, управление транспортным средством (4) осуществляет оператор с использованием устройства дистанционного управления (5) по радиоканалу связи, например, защищенному радиоканалу связи, с дистанционной системой связи и управления (32). В случае применения противником средств радиоподавления водитель осуществляет управление транспортным средством (4) с использованием оптоволоконного кабеля.
При невозможности дальнейшего движения мобильного робототехнического комплекса по условиям ведениям боевых действий из него выгружают малогабаритное робототехническое средство (3).
Разгрузка грузов из транспортного модуля осуществляется следующим образом. Водитель транспортного средства с использованием органов управления (на рисунке не показаны), размещенных на устройстве дистанционного управления (5), последовательно осуществляет следующие действия:
- включает в работу электроприводы перемещения заднего откидного борта (24), которые ослабляют тяговые усилия, приложенные к кронштейнам (25) через кинематические связи, образованные тросами (26) и роликами (27), с валами электроприводов перемещения заднего откидного борта (24). При этом происходит опускание заднего откидного борта (17);
- выключает электроприводы перемещения заднего откидного борта (24) при установке края борта в крайнее нижнее положение;
- включает электропривод (22) ленточного транспортера (19). При этом груз начинает перемещаться по транспортеру и под действием собственной силы тяжести перемещается по роликам (29) до земной поверхности.
- включает в работу двигатель робототехнического средства. При этом робототехническое средство (4) начинает движение и груз полностью опускается на земную поверхность.
Затем малогабаритным мобильным робототехническим средством (3) транспортируют первую часть грузов (1) к месту назначения с использованием оператором дистанционного пульта управления (5).
В случае, если по условиям ведения боевых действий становится возможным дальнейшее передвижение мобильного робототехнического средства (3), то движение и выгрузка грузов (2) из мобильного робототехнического средства (3) осуществляется как это описано выше.
Таким образом, предлагаемый способ позволяет обеспечить возможности по надежной транспортировки грузов в условиях ведения боевых действий, особенно на открытой местности или в городских условиях, и по автоматизированной погрузке и разгрузке грузов с применением оператором дистанционного пульта управления, что приводит к повышению эффективности доставки грузов в районы ведения боевых и расширению области применения способа.
Источник информации:
Патент 2533229, Российская Федерация, МПК B25J 5/00. Многофункциональный робототехнический комплекс обеспечения боевых действий [Текст] / Громов В.В. и др.; заявитель и патентообладатель Открытое акционерное общество "Завод им. В.А. Дегтярева". -№2013101276/02; заявл. 10.01.2013; опубл. 20.11.2014. Бюл. №32 (73).
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2018 |
|
RU2716050C1 |
| ГРУЗОВОЙ КУЗОВ | 2018 |
|
RU2737759C2 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| Малогабаритный мобильный робототехнический комплекс | 2019 |
|
RU2743130C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ | 2013 |
|
RU2533229C2 |
| МОБИЛЬНЫЙ МОДУЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2021 |
|
RU2771402C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| Способ проведения технической разведки повреждённых образцов вооружения и военной техники в ходе ведения боевых действий | 2020 |
|
RU2749540C1 |
Изобретение относится к робототехническим средствам, комплексам и системам военного назначения. Способ доставки грузов в районы ведения боевых действий включает размещение первой части грузов на грузовой платформе малогабаритного робототехнического средства, загрузку второй части грузов, а затем малогабаритного робототехнического средства в транспортный модуль мобильного робототехнического средства, транспортировку грузов мобильным робототехническим средством и выгрузку их в месте назначения. При невозможности дальнейшего движения мобильного робототехнического комплекса по условиям ведения боевых действий из него выгружают малогабаритное робототехническое средство и на нем транспортируют первую часть грузов к месту назначения, а при появлении возможностей по возобновлению движения мобильного робототехнического средства им транспортируют вторую часть грузов и выгружают их из него в месте назначения. Управление движением мобильного робототехнического средства осуществляют водителем с использованием органов управления движением мобильного робототехнического средства, а в районе ведения боевых действий - оператором с использованием дистанционного пульта управления. Управление движением малогабаритного мобильного робототехнического средства, погрузку в транспортный модуль и выгрузку из него грузов, в том числе и малогабаритного мобильного робототехнического средства, осуществляют оператором с использованием дистанционного пульта управления. Технический результат заключается в повышении эффективности доставки грузов в различных условиях ведения боевых действий и расширении области применения способа. 2 н.п. ф-лы, 6 ил.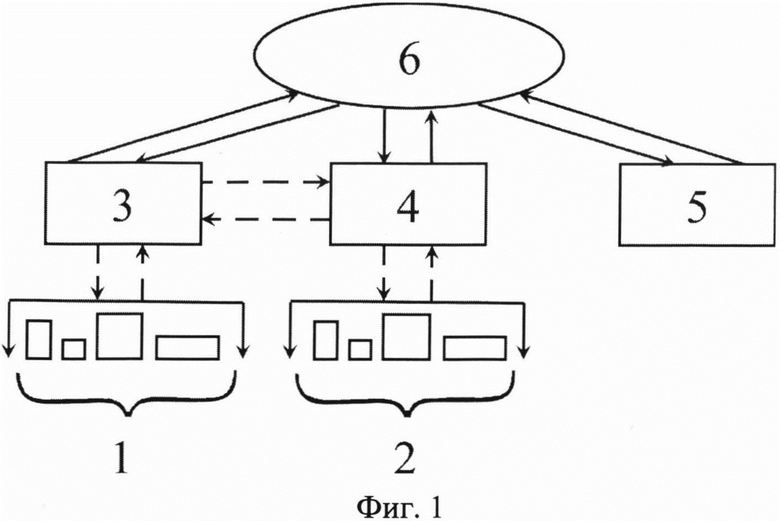
1. Способ доставки грузов в транспортном модуле мобильного робототехнического средства в места ведения боевых действий путем их транспортирования с использованием оператором дистанционного пульта управления, отличающийся тем, что первую часть грузов, необходимых для ведения боевых действий, размещают на грузовой платформе малогабаритного робототехнического средства, а вторую часть грузов загружают в транспортный модуль мобильного робототехнического средства и затем в транспортный модуль загружают малогабаритное робототехническое средство, при этом грузы и малогабаритное робототехническое средство транспортируют мобильным робототехническим средством и выгружают их в месте назначения, причем при невозможности дальнейшего движения мобильного робототехнического комплекса по условиям ведения боевых действий из него выгружают малогабаритное робототехническое средство и на нем транспортируют первую часть грузов к месту назначения, а при возможности по возобновлении движения мобильного робототехнического средства осуществляют транспортировку второй части грузов к месту назначения, причем управление движением мобильного робототехнического средства осуществляют с использованием органов управления движением мобильного робототехнического средства, а в районе ведения боевых действий - оператором с использованием дистанционного пульта управления, управление движением малогабаритного мобильного робототехнического средства, погрузку в транспортный модуль и выгрузку из него грузов, в том числе и малогабаритного мобильного робототехнического средства, осуществляют оператором с использованием дистанционного пульта управления.
2. Система доставки грузов в места ведения боевых действий, содержащая мобильное робототехническое средство, выполненное самоходным с системой управления его движением, с системой связи и передачи данных и с транспортным модулем, и пульт дистанционного управления, связанный по каналу радиообмена с дистанционной системой связи и передачи данных, при этом система управления движением транспортного средства выполнена с возможностью обеспечения перемещения в дистанционном ручном режиме, а транспортный модуль выполнен с возможностью транспортирования грузов, отличающаяся тем, что она дополнительно снабжена малогабаритным робототехническим средством, выполненным в виде дистанционно управляемого малогабаритного транспортного средства повышенной проходимости, на корпусе которого размещены видеокамеры, антенна, транспортная платформа, на которой размещены грузы, а внутри корпуса смонтированы электрический привод движителя, дистанционная система связи и передачи данных, связанная по каналу радиообмена с пультом дистанционного управления и электрически связанная с видеокамерами, блок управления, электрически связанный с электрический приводом движителя и дистанционной системой связи и передачи данных, бортовые источники электропитания, с возможностью его транспортирования в транспортном модуле мобильного робототехнического средства, а мобильное робототехническое средство выполнено в виде вездехода-амфибии с движителем на гусеничном ходу повышенной проходимости и дополнительно снабжено автоматизированным местом водителя, оптоволоконным кабелем, при этом система управления движением вездехода-амфибии выполнена с возможностью обеспечения его перемещения как в дистанционном ручном режиме, так и под управлением водителя, а транспортный модуль имеет возможность автоматизированного проведения погрузочно-разгрузочных работ с использованием дистанционного пульта управления, при этом дистанционное управление движением и проведение погрузочно-разгрузочных работ осуществляется как по радиоканалу, например защищенному каналу радиосвязи, так и посредством передачи электрических сигналов по оптоволоконному кабелю.
| МНОГОФУНКЦИОНАЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОБЕСПЕЧЕНИЯ БОЕВЫХ ДЕЙСТВИЙ | 2013 |
|
RU2533229C2 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
| JP 9292199 A, 11.11.1997 | |||
| KR 1020180086831 A, 01.08.2018 | |||
| EP 3072641 B1, 15.08.2018. | |||

