Изобретение относится к военной техники, а именно к малогабаритным мобильным робототехническим комплексам, предназначенным для дистанционной работы, и может быть использовано для решения задач доставки грузов (боеприпасов, военно-технического имущества, материальных средств, и др.) при обеспечении боевых действий Сухопутных войск.
Из уровня техники известен малогабаритный мобильный робототехнический комплекс «САМЕL» (прототип изобретения), выполненного в виде дистанционно-управляемого транспортного средства повышенный проходимости и содержащего ходовую часть, корпус, транспортную платформу для размещения грузов, пульт дистанционного управления, систему управления движением транспортного средства, включающую антенну, дистанционную систему передачи данных, связанную по каналу радиообмена с пультом дистанционного управления, видеокамеры, электрический привод движителя, блок управления и бортовые источники электропитания (1 - Сайт: sof-mag.ru http://www news2/47_CAMEL.html- Робототехнический комплекс CAMEL).
Робототехнический комплекс CAMEL (Carry-all Mechanized Equipment) был представлен на выставке AUSA в 2010 году компанией Northrop Grumman.
При несомненных достоинствах данного комплекса он имеет низкую надежность работы, ограниченные функциональные возможности и область применения. Данные недостатки обусловлены отсутствием возможностей по надежной защите электронных приборов, грузов и гарантированной доставке грузов в условиях применения противником современных средств поражения, движения по местности со сложным рельефом (крутые склоны), что может привести к повреждениям электронных приборов, грузов, например, при воздействии на них пуль, осколков, электромагнитного излучения и прекращению функционирования комплекса при его опрокидывании при воздействии на него ударной волны или движения по местности со сложным рельефом, что накладывает ограничения на его применение.
Задача, решаемая предлагаемым изобретением, заключается в повышении надежности работы комплекса, расширения его функциональных возможностей и области применения за счет достижения следующего полезного технического результата: обеспечиваются возможности по надежной защите электронных приборов, грузов и гарантированной доставке грузов в условиях применения противником современных средств поражения и движения по местности со сложным рельефом.
Сущность изобретения, обеспечивающая достижение указанного технического результата, заключается в следующем.
Малогабаритный мобильный робототехнический комплекс, выполненный в виде дистанционно-управляемого транспортного средства повышенный проходимости, содержащий ходовую часть, транспортную платформу для размещения грузов, пульт дистанционного управления, систему управления движением транспортного средства, включающую первую антенну, дистанционную систему связи и передачи данных, связанную по каналу радиообмена с пультом дистанционного управления, видеокамеры, электрический привод движителя, блок управления, бортовые источники электропитания дополнительно снабжен датчиком ориентации, второй антенной и приборным модулем, при этом датчик ориентации подключен к блоку управления, вторая антенна подключена к дистанционной системе связи и передачи данных и расположена в нижней части корпуса транспортного средства со стороны противоположной стороне установке первой антенны, блок управления, датчик ориентации и дистанционная система связи и передачи данных размещены в приборном модуле, который имеет отверстия для прохождения шлейфа от антенн к дистанционной системе связи и передачи данных, а транспортная платформа выполнена в виде закрытого разъемного транспортного модуля, при этом корпуса транспортного и приборного модулей выполнены из бронезащитного материала, а высота корпуса транспортного средства, по крайней мере, не равна и не превышает высоту ходовой части.
Обозначенная сущность изобретения связана с достижением заявленного технического результата следующим образом соответственно.
1. Введение в малогабаритный мобильный робототехнический комплекс датчика ориентации, второй антенны, размещенной со стороны противоположной стороне установке первой антенны, и конструктивное выполнение транспортного средства, при котором, по крайней мере, высота его корпуса не равна и не превышает высоту ходовой части, позволит обеспечить возможность управления движением транспортного средства при его опрокидывании, например, при воздействии на него ударной волны или его движения по крутым склонам.
2. Введение в малогабаритный мобильный робототехнический комплекс приборного модуля, в котором размещаются электронные приборы и выполнение транспортной платформы в виде закрытого разъемного транспортного модуля, причем корпуса транспортного и приборного модулей выполнены из бронезащитного материала, например из слоистого бронезащитного материала, позволит обеспечить возможность надежной защиты электронных приборов и грузов от воздействия поражающих факторов современных средств поражения, например, от пуль, осколков, электромагнитного излучения.
2. Повышение надежности работы комплекса, расширение его функциональных возможностей и области применения обеспечивается возможностями по надежной защите электронных приборов, грузов и гарантированной доставке грузов в условиях применения противником современных средств поражения и движения по местности со сложным рельефом (см. п. 1, 2).
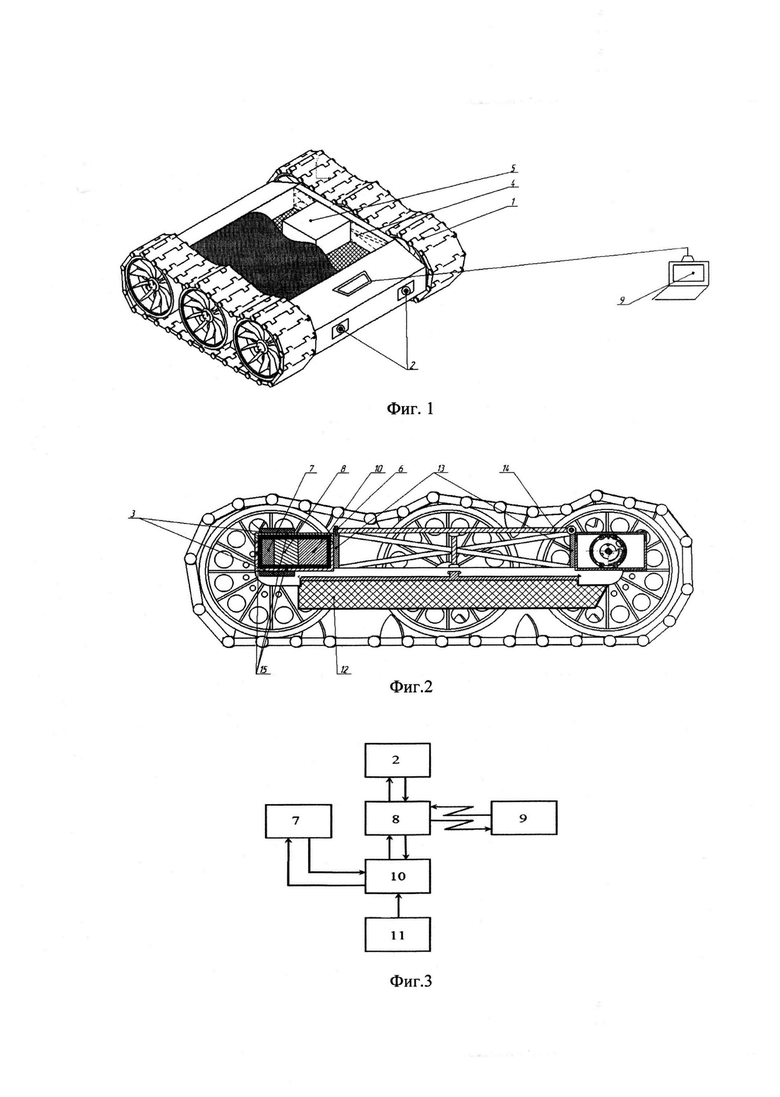
Сущность изобретения поясняется чертежами, где на фиг. 1, фиг. 2 представлены виды устройства, а на фиг. 3 - структурная схема устройства.
Малогабаритный мобильный робототехнический комплекс выполнен в виде дистанционно - управляемого транспортного средства повышенной проходимости с ходовой частью на гусеничном ходу (1), на корпусе которого размещены видеокамеры (2), две антенны 3 (на структурной схеме не показаны), транспортный модуль (4), в котором размещены грузы (5), а внутри корпуса смонтированы приборный модуль (6), в котором размещены датчик ориентации (7), дистанционная система связи и передачи данных (8), связанная по каналу радиообмена с пультом дистанционного управления (9) и электрически связанная с видеокамерами (2), блок управления (10), электрически связанный с электрическим приводом движителя (11), дистанционной системой связи и передачи данных (8) и датчиком ориентации (7), бортовой источник электропитания 12 (на структурной схеме не показан), при этом транспортный модуль (4) содержит стенки (13) и крышку (14), которая шарнирно соединена с одной из боковых стенок и снабжена замками для соединения с другой, при этом корпуса транспортного модуля (4) и приборного модуля (6) выполнены из бронезащитного материала, а в приборном модуле (6) выполнены отверстия (15) для прохождения шлейфа от видеокамер (2) и антенн (3) к блоку управлению (10).
Видеокамеры (2) предназначены для передачи видеоизображения местности в дневное (ночное) время на пульт дистанционного управления (9) посредством дистанционной системы связи и передачи данных (8) и антенн (3) и могут быть выполнены в виде цифровых видеокамер с подсветкой в инфракрасном диапазоне электромагнитных волн.
Антенны (3) предназначены для обеспечения устойчивой связи по радиоканалу с дистанционной системой связи и передачи данных (8) и могут быть выполнены в виде плоских антенных решеток.
Дистанционная система связи и передачи данных (8) предназначена для обеспечения двухсторонней связи по радиоканалу с пультом дистанционного управления (9). Канал связи между указанными модулями обеспечивает передачу команд управления, выдаваемых с пульта управления (9) для осуществления движения малогабаритного робототехнического комплекса и передачу видеоизображения с видеокамер (2) на пульт управления (9) (2- патент РФ №2364500, приоритет от 31.10.2007, МПК В251 5/00).
Датчик ориентации (7) предназначен для определения положения транспортного средства по углам крена и тангажа и может быть выполнен в виде датчика крена и тангажа (3- патент РФ №2682589, приоритет от 25.06.2018, МПК G01 19/44).
Блок управления (10) предназначен для обработки информации, поступающей от дистанционной системы связи и передачи данных (8), датчика ориентации (7), обеспечения управления видеокамерами (2) и электрическим приводом движителя (11) и может быть выполнен в виде процессора (компьютера).
Пульт дистанционного управления (9) предназначен для управления движением транспортного средства и может быть выполнен в виде интегрированной системы, включающей в себя приемник и передатчик радиосигналов, органы управления движением и панель отображения движения транспортного средства на местности.
Малогабаритный мобильный робототехнический комплекс функционирует следующим образом.
Перед началом движения транспортного средства в транспортный модуль (4) загружают грузы (5) и затем надежно закрывают транспортный модуль (4) крышкой (14).
Движение транспортного средства осуществляет оператор дистанционно путем подачи соответствующих команд управления по радиоканалу с использованием органов управления движением дистанционного пульта управления (9) с учетом видеоизображения движения транспортного средства на местности, формируемого видеокамерами (2), передаваемого дистанционной системой связи и передачи данных (8) и отображаемым на панели пульта управления (9). По командам управления оператора, передаваемых дистанционной системой связи и передачи данных (8), блок управления (10) формирует управляющие сигналы, которые поступают на электрический привод движителя (11). При этом двухстороннюю связь по радиоканалу с пультом дистанционного управления (9) обеспечивает дистанционная система связи и передачи данных (8) с использованием первой антенны (3), расположенной в верхней части корпуса.
В случае опрокидывания транспортного средства при воздействии на него поражающих факторов современных средств поражения, например, ударной волны, или его движения по крутым склонам, оно продолжает дальнейшее устойчивое движение, так как высота его корпуса меньше высоты его ходовой части. При этом двухстороннюю связь по радиоканалу с пультом дистанционного управления (9) обеспечивает дистанционная система связи и передачи данных (8) с использованием второй антенны (3), расположенной в нижней части корпуса, которая включается в работу по сигналу, поступающему от блока управления (10) при срабатывании датчика ориентации (7). В этом случае работа дистанционной системы связи и передачи данных (8) с использованием первой антенны прекращается.
В случае применения противником современных средств поражения защиту электронных блоков, грузов от его поражающих факторов обеспечивает бронезащитный материал приборного модуля (6) и транспортного модуля (4) соответственно.
Таким образом, предлагаемое изобретение позволяет повысить надежность работы комплекса, расширить его функциональные возможности и область применения за счет обеспечения возможностей по надежной защите электронных приборов, грузов и гарантированной доставке грузов в условиях применения противником современных средств поражения и движения по местности со сложным рельефом.
Источники информации
1. Сайт: sof-mag.ru http://www news2/47_CAMEL.html- Робототехнический комплекс CAMEL.
2. Патент 2364500, Российская Федерация, В251 5/00. Мобильный робототехнический комплекс. [Текст] / Лебедев и др.; заявитель и патентообладатель Открытое акционерное общество "Ковровский электромеханический завод" - №2007140387/02; заявл. 31.10.2007; опубл. 20.08.2009, бюл. №23.
3. Патент 2682589, Российская Федерация, МПК G01 19/44. Датчик крена и тангажа [Текст] / Корон В.Я. и др.; заявитель и патентообладатель Открытое акционерное общество «Специальное конструкторское бюро приборостроения и автоматики. - №2018123123; заявл. 25.06.2018; опубл. 19.03.2019 Бюл. №8.
4. Патент 2429971, Российская Федерация, МПК В32В 15/18 (2006.01), С22С 38/46 (2006.01), F41H 5/04(2006.01), F41H 1/02(2006.01). Слоистый бронезащитный материал [Текст] / Бащенко А.П. и др.; заявитель и патентообладатель Общество с ограниченной ответственностью Центр специальных технологий. - №2009120624/02; заявл. 01.06.2009; опубл. 10.12.2010 Бюл. №34.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДОСТАВКИ ГРУЗОВ В МЕСТА ВЕДЕНИЯ БОЕВЫХ ДЕЙСТВИЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2714785C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2018 |
|
RU2716050C1 |
| ПЕРЕНОСНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ И БОЕВОГО ОБЕСПЕЧЕНИЯ | 2019 |
|
RU2725942C1 |
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ | 2020 |
|
RU2737684C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ РОБОТОТЕХНИЧЕСКИМ КОМПЛЕКСОМ | 2014 |
|
RU2574938C2 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2559194C1 |
| МОБИЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2580779C2 |
Изобретение относится к военной технике, а именно к малогабаритным мобильным робототехническим комплексам, предназначенным для дистанционной работы, и может быть использовано для доставки грузов при обеспечении боевых действий сухопутных войск. Комплекс содержит ходовую часть, транспортную платформу для размещения грузов, приборный модуль, пульт дистанционного управления, систему управления движением транспортного средства, включающую первую и вторую антенны, дистанционную систему передачи данных, связанную по каналу радиообмена с пультом дистанционного управления, видеокамеры, датчик ориентации, электрический привод движителя, блок управления, бортовые источники электропитания. При этом вторая антенна расположена в нижней части корпуса со стороны, противоположной стороне установке первой антенны, блок управления, датчик ориентации и дистанционная система связи и передачи данных размещены в приборном модуле, который имеет отверстия для прохождения шлейфа от антенн к дистанционной системе связи и передачи данных, а транспортная платформа выполнена в виде закрытого разъемного транспортного модуля. При этом корпусы транспортного и приборного модулей выполнены из бронезащитного материала, а высота корпуса транспортного средства, по крайней мере, не равна и не превышает высоту ходовой части. Изобретение позволит обеспечить возможность надежной защиты электронных приборов, грузов и гарантированной доставки грузов в условиях применения противником современных средств поражения и движения по местности со сложным рельефом. 1 з.п. ф-лы, 3 ил.
1. Малогабаритный мобильный робототехнический комплекс, выполненный в виде дистанционно-управляемого транспортного средства повышенной проходимости, содержащий ходовую часть, транспортную платформу для размещения грузов, пульт дистанционного управления, систему управления движением транспортного средства, включающую первую антенну, дистанционную систему связи и передачи данных, связанную по каналу радиообмена с пультом дистанционного управления, видеокамеры, электрический привод движителя, блок управления, бортовые источники электропитания, отличающийся тем, что он дополнительно снабжен датчиком ориентации, второй антенной и приборным модулем, при этом датчик ориентации подключен к блоку управления, вторая антенна подключена к дистанционной системе связи и передачи данных и расположена в нижней части корпуса транспортного средства со стороны, противоположной стороне установки первой антенны, блок управления, датчик ориентации и дистанционная система связи и передачи данных размещены в приборном модуле, который имеет отверстия для прохождения шлейфа от видеокамер и антенн к дистанционной системе связи и передачи данных, а транспортная платформа выполнена в виде закрытого разъемного транспортного модуля, при этом корпусы транспортного и приборного модулей выполнены из бронезащитного материала, а высота корпуса транспортного средства, по крайней мере, не равна и не превышает высоту ходовой части.
2. Малогабаритный мобильный робототехнический комплекс по п. 1, отличающийся тем, что в качестве бронезащитного материала корпусов транспортного и приборного модулей используется слоистый бронезащитный материал, который состоит по меньшей мере из двух слоев, фронтального и тыльного.
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2364500C2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ МОБИЛЬНЫЙ РОБОТ, ВИДЕОКАМЕРА МОБИЛЬНОГО РОБОТА, ЗВУКОПРИЕМНАЯ СИСТЕМА САМОНАВЕДЕНИЯ МОБИЛЬНОГО РОБОТА, СФЕРИЧЕСКАЯ ГРАНАТА | 2011 |
|
RU2473863C1 |
| US 4932831 A1, 12.06.1990. | |||

