Область техники, к которой относится изобретение, и раскрытие сущности изобретения
Данное изобретение представляет собой систему предупреждения для предотвращения столкновения мотоцикла с другими транспортными средствами, в случае его экстренного торможения или при слишком быстром приближении идущего сзади транспортного средства. Более конкретно, изобретение представляет собой устройство, которое проводит анализ движения мотоцикла в режиме реального времени. В случае экстренного торможения или аварийной остановки, устройство автономным дополнительным мигающим стоп-сигналом предупреждает участников дорожного движения, которые следуют за мотоциклом, об опасной ситуации перед ними. В тоже время, устройство контролирует движение идущего сзади транспортного средства, и в случае слишком быстрого его приближения к задней части мотоцикла, что обычно является признаком того, что водитель транспортного средства не заметил мотоциклиста, движущегося перед ним, устройство предупреждает об опасности с помощью дополнительного автономного мигающего стоп-сигнала. Водитель мотоцикла также предупреждается об опасности индикаторной лампочкой, расположенной на руле мотоцикла.
Задача обеспечения безопасности, которую решает данное изобретение, состоит в том, чтобы предотвратить как можно большее количество аварий мотоциклов, которые часто заканчиваются смертью или серьезными травмами мотоциклистов. Мотоцикл остается самым опасным средством передвижения на дорогах. Относительно большой процент аварий вызван столкновениями с мотоциклом сзади (ударом сзади). Стоп-сигнал, который является наиболее важным источником информации для других участников дорожного движения, не дает достаточно четкой информации о маневре мотоцикла в экстремальной ситуации следующим за ним водителям. Техническая задача, решаемая данным изобретением, состоит в том, чтобы запроектировать и разместить на мотоцикле систему предупреждения с автономным дополнительным мигающим аварийным стоп-сигналом, который будет предупреждать участников дорожного движения, следующих за мотоциклом, в двух случаях: в случае экстренного торможения и при слишком быстром приближении идущего сзади транспортного средства к мотоциклу. В тоже время, система следит за движением мотоцикла и движением транспортных средств за ним, и в случае угрозы возможного столкновения предупреждает о присутствии мотоцикла с помощью автономного дополнительного мигающего аварийного стоп-сигнала. Это улучшает понимание ситуации, также уменьшается время реагирования и, следовательно, снижается вероятность аварии.
Уровень техники
Системы предупреждения в случае экстренного торможения, аварийной остановки (EBD стоп-сигнал, от англ. Emergency Braking Display - дисплей аварийного торможения, или сигнал аварийной остановки, англ. Emergency Stop Signal) с дополнительным мигающим стоп-сигналом уже существуют. Решение также описано в патенте JPH 08276785, в котором представлен процесс подачи сигналов в виде лампочек с синхронизированным быстрым миганием в случае, когда водитель внезапно тормозит, тем самым предостерегая следующих за ним водителей. Параметры работы аварийных стоп-сигналов EBD определены в некоторых международных правилах (Правила ЕЭК ООН №48, разделы 6.23 и 6.25, Правила №13 ЕЭК ООН, раздел 5.2.1.31 и Правила №13-Н ЕЭК ООН, раздел 5.2.23), которые не относятся к мотоциклам, так как такие системы устанавливаются главным образом в автомобилях.
Ближайшая подобная технология - это, так называемый динамический стоп-сигнал (англ. Dynamic Brake Light), который применяется только на мотоциклах марки БМВ более высокого ценового диапазона и предназначен только для предупреждения о внезапной аварийной остановке с помощью мигающего аварийного стоп-сигнала, таким образом, он представляет собой только часть предлагаемого решения. Версия для БМВ доступна мотоциклистам в качестве дополнительного оснащения с 2016 года и состоит из двух ступеней. Первая активируется, когда мотоциклист резко тормозит на скорости свыше 50 км/ч. В этом случае стоп-сигнал мигает с частотой 5 Гц. Когда мотоциклист сильно снижает скорость (скорость составляет менее 14 км/ч), в качестве второй ступени включаются предупреждающие мигающие лампочки, которые остаются включенными до тех пор, пока мотоцикл не разгонится до скорости не менее 20 км/ч.
Систем, содержащих данное изобретение, которые объединяли бы в себе автономный дополнительный мигающий сигнал с предупреждением о внезапном торможении мотоцикла в аварийной ситуации и предупреждением о слишком быстром приближении транспортного средства сзади, еще не существует.
Краткое описание чертежей
Более конкретно принцип действия данного изобретения будет пояснен ниже, с описанием варианта осуществления и представлением фигур, на которых изображено:
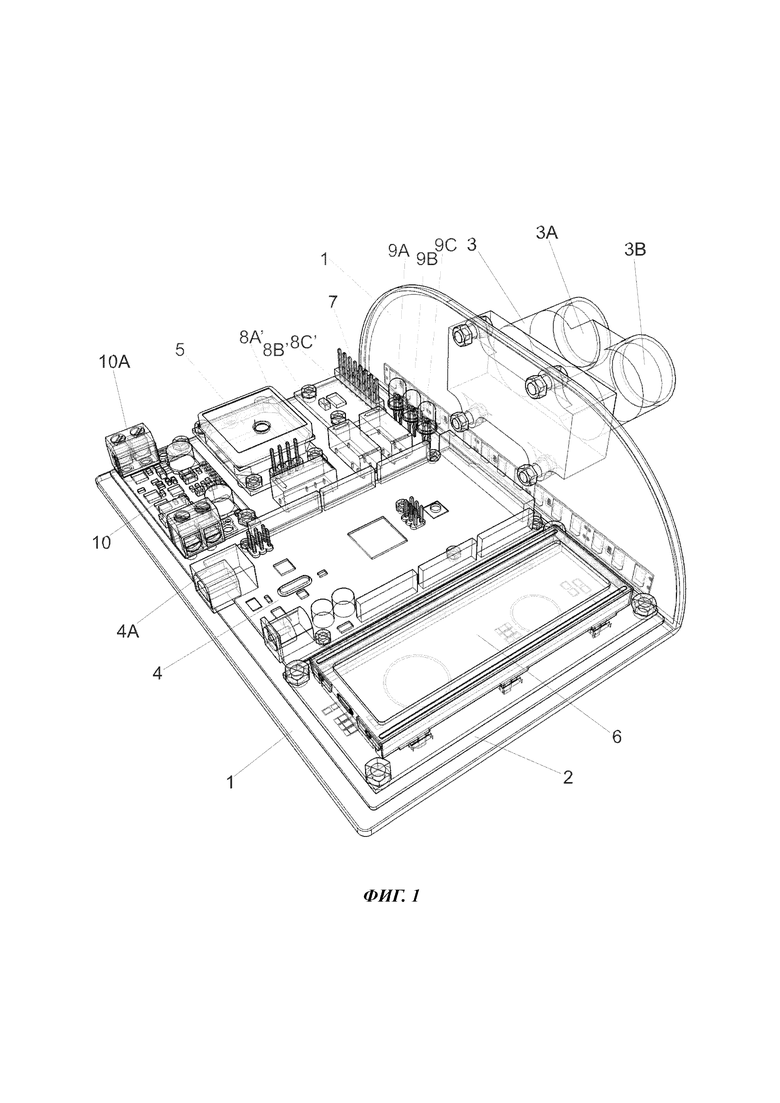
Фиг. 1: Изобретение в изометрической проекции
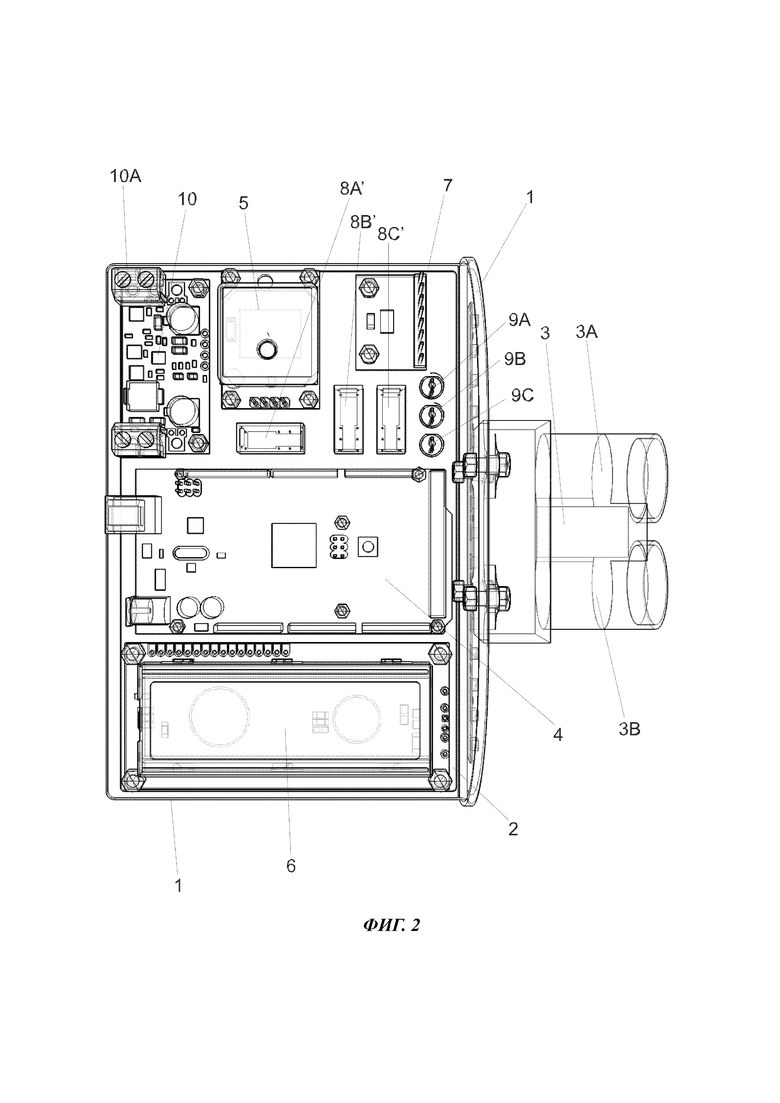
Фиг. 2: Чертеж изобретения
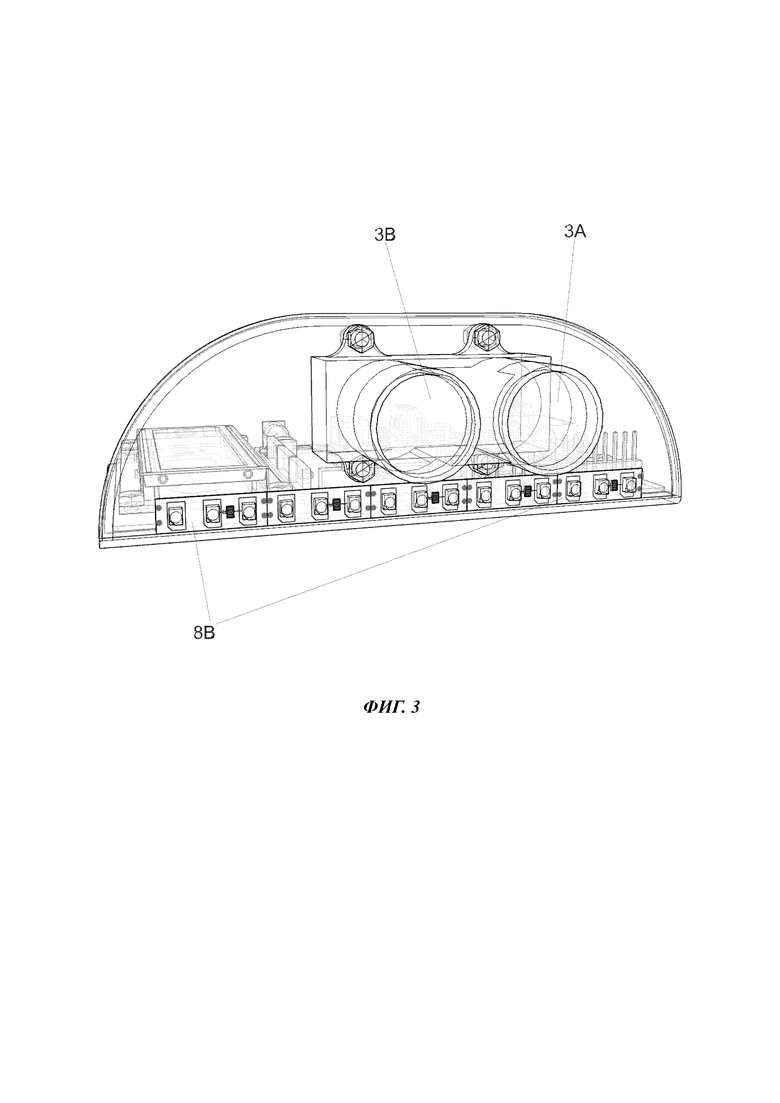
Фиг. 3: Вид изобретения сзади
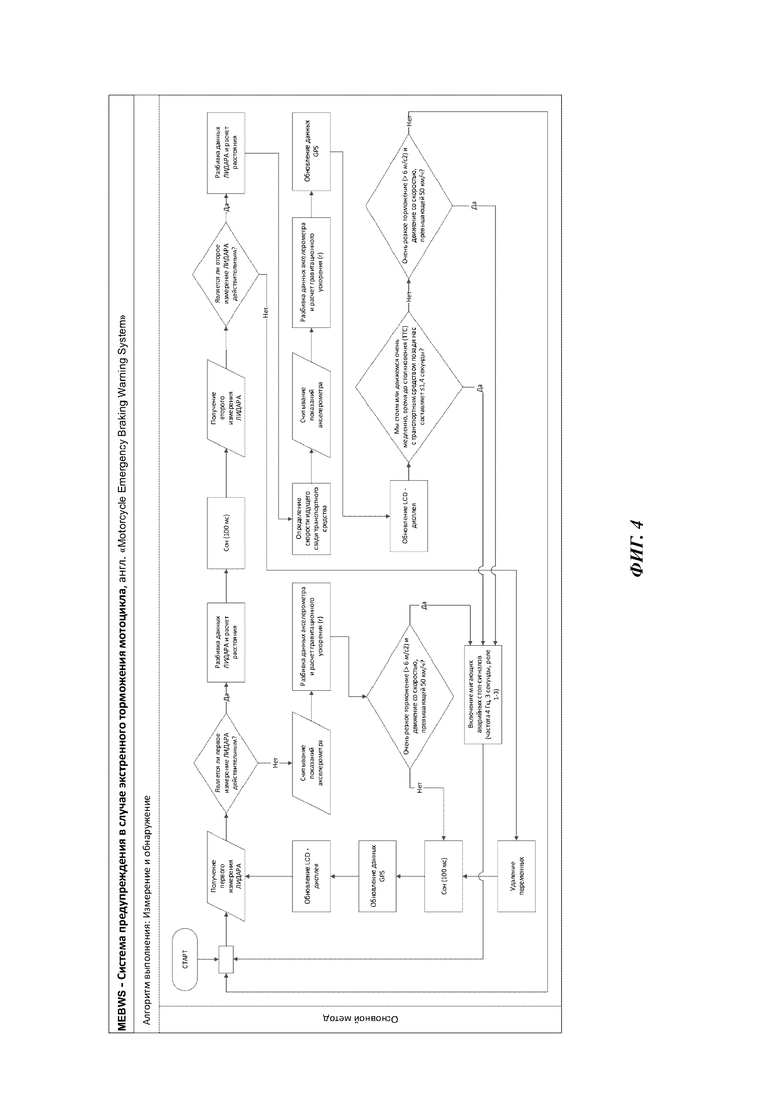
Фиг. 4: Рабочая диаграмма
Осуществление изобретения
Система состоит из двух функциональных частей. Первая часть работает по принципу контрольной системы с прямой связью, вторая же работает по принципу контрольной системы с обратной связью. Это означает, что в определенной ситуации может рассматриваться только мотоцикл с установленной системой, при этом также могут учитываться внешние факторы:
- Тормозит ли мотоцикл очень резко (например, g≥6 м/с2)?
- Приближается ли транспортное средство к мотоциклу сзади на скорости, на которой, скорее всего, оно не сможет вовремя остановиться (водитель не заметил мотоцикл)?
В обоих случаях, мотоцикл предупреждает о себе мигающим сигналом аварийного стоп-сигнала 8В и стоп-сигналом мотоцикла 8А, который подключен к системе через реле 8А'. Сигнал подается интуитивно, четко и недвусмысленно и водитель, следующий за мотоциклом, в максимально короткое время и с максимальной эффективностью получает предупреждение о том, что мотоцикл, находящийся перед ним, резко торозит или, например, мотоцикл останавливается перед светофором (ждет зеленый сигнал светофора) и что необходимо предпринять соответствующие действия (затормозить).
Основными компонентами устройства, входящего в данное изобретение, являются: лидар 3, с помощью которого измеряется расстояние (скорость) до идущего сзади транспортного средства, GPS модуль 5, который служит для определения собственной скорости, акселерометр 7 и блок микроуправления 4. Все элементы смонтированы на одной панели на печатной плате 2 (за исключением лидара 3) и на держателе 1, изготовленном из материала, который обеспечивает прочность и занимает минимум пространства (например, поликарбонат). Лидар 3 установлен отдельно (перпендикулярно к другим компонентам), с другой стороны держателя 1, для обеспечения возможности обнаружения приближающегося транспортного средства. Задача блока питания 10 состоит в том, чтобы уменьшить электрические помехи и обеспечить соответствующее электрическое напряжение через существующую электрическую систему мотоцикла, которая подключена к входному разъему для проводника аккумулятора 10А.
Блок микроуправления 4 питается непосредственно от блока питания 10 и обеспечивает правильную работу компонентов. Рядом с ним находятся три реле 8', которые включают и выключают (мигание) встроенный аварийный светодиодный стоп-сигнал 8В, стоп-сигнал мотоцикла 8А и светодиод на руле управления 8С, который подключен к системе через реле 8С, и информирует мотоциклиста о включении лампочек 8А и 8В. Рядом с блоком микроуправления 4 установлен дисплей, показывающий состояние системы 6, который отображает текущие параметры и настройки системы (например, данные о гравитационных силах в направлениях х и у, скорость движения в данный момент, а также расстояние и скорость приближающегося объекта - транспортного средства). Он снабжен светодиодами состояния 9, которые показывают текущее оперативное состояние. В тестовом варианте, светодиод 9С (зеленый) используются в качестве индикатора готовности системы, 9В (желтый) - в качестве индикатора (импульса) каждого измерения выполненного лидаром 3 и 9А (красный) - в качестве индикатора ошибки.
Микроконтроллер 4 представляет собой набор встроенных элементов, в которых можно найти основные элементы характерные для компьютера: процессор, память и периферию (входы и выходы). Процессор отвечает за выполнение расчета и принятие решения, а в памяти находится программное обеспечение. Периферия может быть описана как отдельные блоки, поддерживающие процессор. В отличии от микропроцессоров, микроконтроллеры обычно имеют более низкое потребление энергии, меньший размер и более низкую стоимость. В тестовом варианте настоящего изобретения был использован микроконтроллер с открытым кодом, который используется на одной базовой плате (англ. «single board-based microcontroler» - одноплатный микроконтроллер), это означает, что все компоненты, включая соединения, являются одной печатной платой. Питание осуществляться через USB-соединение, обычный адаптер AC-DC или батарею (аккумулятор). Управление (регулировка) осуществляется через контрольный вход 4А.
Измеритель ускорений (англ. accelerometer - акселерометр) в данном варианте имеет чрезвычайно маленькие размеры. Ускорение или сила g (англ. «g- force») до ±16 г могут быть измерены с 13-битным разрешением в направлении всех трех осей. Прибор может использоваться для измерения, как статической гравитационной силы, так и динамических ускорений, вызванных движением или сотрясением. Благодаря высокой чувствительности, прибор способен обнаруживать уклоны менее одного градуса. Кроме основной функции измерения ускорения, прибор может также интерпретировать различные события из окружающей среды: одиночные или двойные толчки во всех трех направлениях (англ. «tap»), свободное падение (англ. «free-fall») и мониторинг активности/неактивности, которые определяются пользователем. Акселерометр 7 представляет собой важную часть системы. С его помощью устройство контролирует положение мотоцикла, определяет, как он движется или тормозит. Полученные данные, вместе с GPS модулем 5, являются ключевыми для принятия решения о том, находится ли мотоциклист в опасной ситуации. Альтернативным вариантом модуля GPS, для получения данных о скорости мотоцикл, может быть подключение изобретенной системы к диагностической системе OBD (англ. OBD, «On Board Diagnostics)) - бортовая диагностика), но она отсутствует в большинстве мотоциклов или присутствует в нестандартной форме, поэтому модуль GPS представляет собой решение, которое подходит для всех типов мотоциклов.
Лидар 3 (иногда пишется заглавными буквами - ЛИДАР), также известный как ЛАДАР, (англ. laser altimetry - лазерная альтиметрия) является сокращением (аббревиатурой) словосочетания «измерение и обнаружение света» (англ. «Light Detection and Ranging» - обнаружение света и ранжирование). Прибор представляет собой технологию, которая излучает сильный направленный луч (импульс) света и измеряет время отражения света к приемнику. Используя эту информацию, можно рассчитать расстояние до конкретного предмета. Методика дистанционного определения расстояния похожа на устройство радара, с той разницей, что вместо радиоволн используются лазерные импульсы (через оптические элементы 3А и 3В). Сбор данных с использованием лидара имеет ряд преимуществ перед другими методами, включая высокое разрешение и точность до сантиметра.
Лидар 3 подключен к блоку микроконтроллера 4, который считывает данные измерений через интерфейс PWM (от англ. Pulse Width Modulation» - широтно-импульсная модуляция). Если лидар не отправляет данные, это означает, что он находится в состоянии высокого импеданса и переключается в состояние низкого сопротивления после проведения измерения. Время, в течении которого прибор остается в этом состоянии пропорционально представляет собой измеренное расстояние 1 qs/см.
На фиг.4 показана диаграмма передачи и обработки информации.
Когда водитель мотоцикла очень резко тормозит (например, когда скорость превышает 50 км/ч и в то же время замедление превышает 6 м/с2), микроконтроллер 4 обнаруживает опасную ситуацию через акселерометр 7 и запускает мигание реле 8' и тем самым встроенный светодиодный аварийный стоп-сигнал 8В (через реле 8В'), начинает также мигать стоп-сигнал мотоцикла 8А, который подключен к системам через реле 8А', включается мигающий светодиод 8С, который подключен к системе через реле 8С'. Последний расположен на руле мотоцикла и предупреждает мотоциклиста об обнаруженной опасности. Лампочки начинают мигать, например, 3 секунды с частотой 4 Гц и прекращают мигать, когда сила торможения опускаетсяя ниже 2,5 м/с2.
Когда лидар 3 обнаруживает, что транспортное средство приближается к задней части мотоцикла, блок микроконтроллера 4 определяет его скорость, используя измерения лидара 3. Если транспортное средство приближается очень быстро (например, если ТТС (время до столкновения) рассчитывается как соотношение между расстоянием и скоростью, которое меньше или равно 1,4 секундам), микроконтроллер 4 также включает мигающий встроенный аварийный светодиодный стоп-сигнал 8В (через реле 8В'), мигающий стоп-сигнал мотоцикла 8А, который подключен к системе через реле 8А', и мигающий светодиод 8С, который подключен к системе через реле 8С'. Последний расположен на руле мотоцикла и предупреждает мотоциклиста о обнаруженной опасности. Лампочки начинают мигать, например, 3 секунды с частотой 4 Гц.
Система, согласно изобретению, по размерам не превышает объем (ширину) задней части сиденья мотоцикла, поэтому она может быть установлена при серийном производстве. Она также может быть установлена позже, для этой цели предусмотрены специальные держатели. В крайнем случае, систему можно установить на мотоцикл с помощью двух соединительных лент, закрепленных в отверстия держателя 1.
Независимо от описанного варианта очевидно, что можно также выполнить другие варианты, не только с точки зрения внешнего вида изобретения, но также с точки зрения использования отдельных элементов, которые могут быть заменены другими технологиями, не изменяя при этом сути изобретения, которая определена в патенте изобретения.
Список ссылочных обозначений
1 - держатель
2 - несущая панель для печатных плат
3 - лидар
3А - излучатель лучей
3В - приемник лучей
4 - блок микроуправления (микроконтроллер, а также микроуправление)
4А - контрольный вход для блока микроуправления
5 - GPS модуль
6 - дисплей состояния системы
7 - акселерометр
8 - аварийные стоп-сигналы
8А - стоп-сигнал мотоцикла (на фигурах не показан)
8В - встроенный аварийный светодиодный стоп-сигнал
8С - светодиоды на руле управления мотоцикла (на фигурах не показан)
8' - реле (выключатели для включения аварийного стоп-сигнала)
8А' - для стоп-сигнала
8 В' - для встроенного (дополнительного) аварийного светодиодного стоп-сигнала
8С' - для предупредительного светодиода для водителя (мотоциклиста)
9 - светодиоды состояния
9А - красный
9В - желтый
9С - зеленый
10 - блок питания
10А - входной разъем для проводника аккумулятора
Изобретение относится к системам безопасности транспортных средств. Система предупреждения для предотвращения столкновения с мотоциклом в случае экстренного торможения мотоцикла или быстрого приближения следующего за ним транспортного средства включает в себя модуль GPS, акселерометр, лидар, блок микроконтроллера и дисплей состояния системы. Система состоит из двух функциональных частей: первая часть для экстренного торможения мотоцикла представляет собой контрольную систему с открытым контуром, вторая часть для предупреждения слишком быстро приближающегося сзади транспортного средства представляет собой систему управления с закрытым контуром. Вторая часть содержит модуль GPS, акселерометр, блок микроконтроллера и дисплей состояния системы, установленные вместе на печатной плате и на держателе, лидар установлен перпендикулярно другим блокам, вместе с излучателем и приемником лучей для обнаружения приближающегося транспортного средства. Система подключена к внешним устройствам: стоп-сигнал мотоцикла, подключенный к системе через реле, и светодиод на руле, который сообщает мотоциклисту о включении аварийного стоп-сигнала. Достигается повышение безопасности управления транспортным средством. 6 з.п. ф-лы, 4 ил.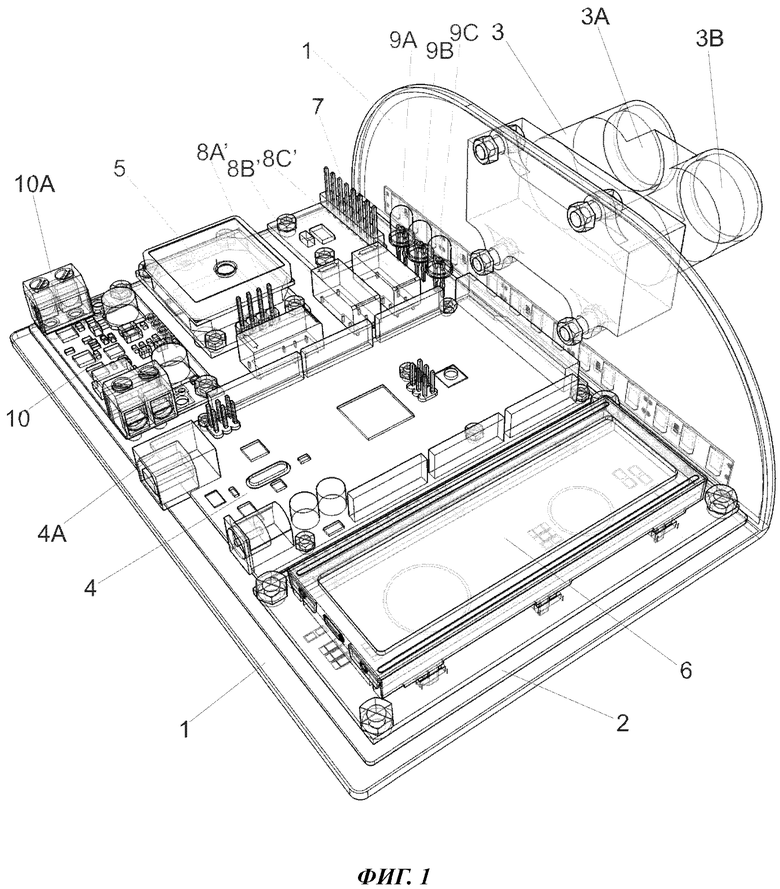
1. Система предупреждения для предотвращения столкновения с мотоциклом в случае экстренного торможения мотоцикла или быстрого приближения следующего за ним транспортного средства включает в себя модуль GPS (5), акселерометр (7), лидар (3), блок микроконтроллера (4) и дисплей состояния системы (6),
отличающаяся тем, что
состоит из двух функциональных частей - первая часть, для экстренного торможения мотоцикла, представляет собой контрольную систему с открытым контуром, и вторая часть, для предупреждения слишком быстро приближающегося сзади транспортного средства, представляет собой систему управления с закрытым контуром, в которой находится модуль GPS (5), акселерометр (7), блок микроконтроллера (4) и дисплей состояния системы (6), которые установлены вместе на печатной плате (2) и на держателе (1), лидар (3) установлен перпендикулярно другим блокам, вместе с излучателем (3А) и приемником лучей (3В), и способен обнаруживать приближающееся транспортное средство; к другим элементам, подключенным к системе, относятся встроенный аварийный стоп-сигнал (8В), выключатель аварийного стоп-сигнала (8'), светодиоды состояния (9) и блок питания (10), одновременно к системе подключены элементы, расположенные вне держателя (1): стоп-сигнал мотоцикла (8А), подключенный к системе через реле (8А'), и светодиод на руле (8С), который подключен к системе через реле (8С') и сообщает мотоциклисту о включении аварийного стоп-сигнала (8).
2. Система оповещения по п. 1,
отличающаяся тем, что
реле или выключатели для включения аварийных стоп-сигналов (8'), которые включают и выключают аварийные стоп-сигналы, главным образом их три - реле 8А' для стоп-сигнала мотоцикла (8А), реле (8В') для встроенного аварийного светодиодного стоп-сигнала (8В) и реле (8С') для светодиодного сигнала для водителя (8С), который информирует водителя о включении этих сигналов, а светодиоды состояния (9) показывают текущее рабочее состояние системы, при этом желтый светодиод (9В) выступает в качестве индикатора отдельного сделанного лидаром (3) измерения и красный (9А) в качестве индикатора ошибки.
3. Система оповещения по любому из пп. 1 и 2,
отличающаяся тем, что
для работы микроконтроллера (4) желательно использовать микроконтроллер на одной базовой плате с питанием от USB-соединения, обычного адаптера переменного или постоянного тока AC-DC или аккумулятора, управление осуществляется через контрольный вход (4А).
4. Система оповещения по любому из пп. 1-3,
отличающаяся тем, что
данные измерителя ускорения (7), который определяет, как мотоцикл движется и тормозит, включая данные модуля GPS (5) или диагностической системы OBD, и лидара (3), который измеряет время отражения луча к приемнику и тем самым определяет расстояние до конкретного объекта, - все эти три элемента подключены к блоку микроуправления (4) и являются ключевыми для принятия решения о том, находится ли мотоциклист в опасной ситуации.
5. Система оповещения по любому из пп. 1-4,
отличающаяся тем, что
когда водитель мотоцикла очень резко тормозит, микроконтроллер (4) обнаруживает опасную ситуацию с помощью измерителя ускорения (7) и запускает мигание реле (8') и тем самым мигание встроенного аварийного светодиодного стоп-сигнал (8В), мигание стоп-сигнала мотоцикла (8А) и мигание светодиода (8С), который предупреждает мотоциклиста сигналом на руле мотоцикла.
6. Система оповещения по любому из пп. 1-5,
отличающаяся тем, что,
когда лидар (3) обнаруживает транспортное средство, приближающееся к задней части мотоцикла, микроконтроллер (4) вычисляет скорость транспортного средства посредством своих измерений и, если оно приближается очень быстро к мотоциклу, запускает реле (8'), которое начинает включаться и выключаться, таким образом, начинает мигать встроенный аварийный светодиодный стоп-сигнал (8В), мигает стоп-сигнала мотоцикла (8А) и светодиод (8С), который предупреждает мотоциклиста сигналом на руле мотоцикла.
7. Система оповещения по п. 1,
отличающаяся тем, что
держатель (1) желательно должен быть выполнен из материала, который обеспечивает прочность и позволяет занимать минимум пространства, чтобы держатель (1) со всеми прикрепленными к нему элементами мог быть установлен в задней части сиденья мотоцикла.
| US 7418346 B2, 28.08.2008 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Способ предотвращения столкновения транспортных средств | 2015 |
|
RU2616114C1 |

