Изобретение относится к области организации дорожного движения, в частности к техническим средствам обучения вождению автотракторной техники.
Известен имитатор дорожный, содержащий кабину автомобиля, органы управления автомобилем, расположенные в кабине, кресло водителя, контрольно-измерительные приборы [Техническое описание и инструкция по эксплуатации автомобиля].
Известное устройство представляет собой кабину автомобиля со всеми органами управления и контрольно-измерительными приборами и предназначено для изучения устройства автомобиля. Недостатком известного тренажера является отсутствие визуальных и динамических имитаторов дороги.
Наиболее близким к предлагаемому изобретению является тренажер, Имитатор дорожный, содержащий кабину автомобиля, рулевую колонку, органы управления автомобилем, расположенные в кабине, кресло водителя, микропроцессорное устройство автомобиля, с которым соединены контрольно-измерительные приборы, и экран для отображения вида на дорогу, соединенный с микропроцессорным устройством автомобиля [Техническое описание автотренажера].
Известное устройство работает по принципу проецирования дороги на экран, моделирования микропроцессорным устройством положения автомобиля относительно дороги и изменения положения автомобиля относительно дороги с помощью органов управления. Недостатком известного устройства является имитация влияния дорожного рельефа на управление автомобилем зрительными образами с помощью программно-вычислительных средств изменением положения автомобиля на изображении дороги без воздействия на рецепторно-мышечную систему обучаемого.
Технический результат направлен на имитацию дорожного рельефа и поворотов транспортного средства дополнительно к зрительным образам, динамическим воздействием на рецепторно-мышечную систему обучаемого посредством механических перемещений кабины автомобиля.
Технический результат достигается тем, что имитатор дорожный, содержащий кабину автомобиля, рулевую колонку, органы управления автомобилем, расположенные в кабине, кресло водителя, микропроцессорное устройство автомобиля, с которым соединены контрольно-измерительные приборы и экран для отображения вида на дорогу, дополнительно содержит основание, четыре линейных пневмопривода, расположенных с вертикальным ходом корпусами на основании, четыре шарнирных узла, соединенных с подвижными штоками линейных пневмоприводов, платформу наклонения, соединенную с шарнирными узлами, платформу поворотную, расположенную на платформе наклонения через подшипники качения, два дуговых пневмопривода, соединенных корпусами с платформой наклонения, а подвижными дуговыми штоками с поворотной платформой, ориентированных противоположно друг другу, пневмопривод, соединенный с рулевой колонкой, компрессор воздушный, электродвигатель, соединенный с компрессором, ресивер, соединенный с компрессором, семь регулируемых газовых клапанов высокого давления, соединенных с ресивером и с пневмоприводами, семь нерегулируемых газовых клапанов с положениями «открыт-закрыт», соединенных параллельно с регулируемыми клапанами, семь регулируемых газовых спусковых клапанов, соединенных с пневмоприводами, семь нерегулируемых газовых спусковых клапанов с положениями «открыт-закрыт», соединенных с пневмоприводами, пневмопривод, соединенный с рулевой колонкой, центральное микропроцессорное устройство имитатора (ЦМПУИ) с массивами и программой отображения в реальном масштабе времени дороги и окружающего ее рельефа, семь устройств управления клапанами, соединенных с группами клапанов пневмоприводов, семь цифроаналоговых преобразователей, соединенных с устройствами управления и с центральным микропроцессорным устройством имитатора, устройство управления электродвигателем, соединный с ЦМПУИ, механо-электрические устройства, соединенные с механическими органами управления автомобиля, аналого-цифровые преобразователи, соединенные с механо-электрическими преобразователями и с ЦМПУИ, при этом кабина водителя расположена на поворотной платформе.
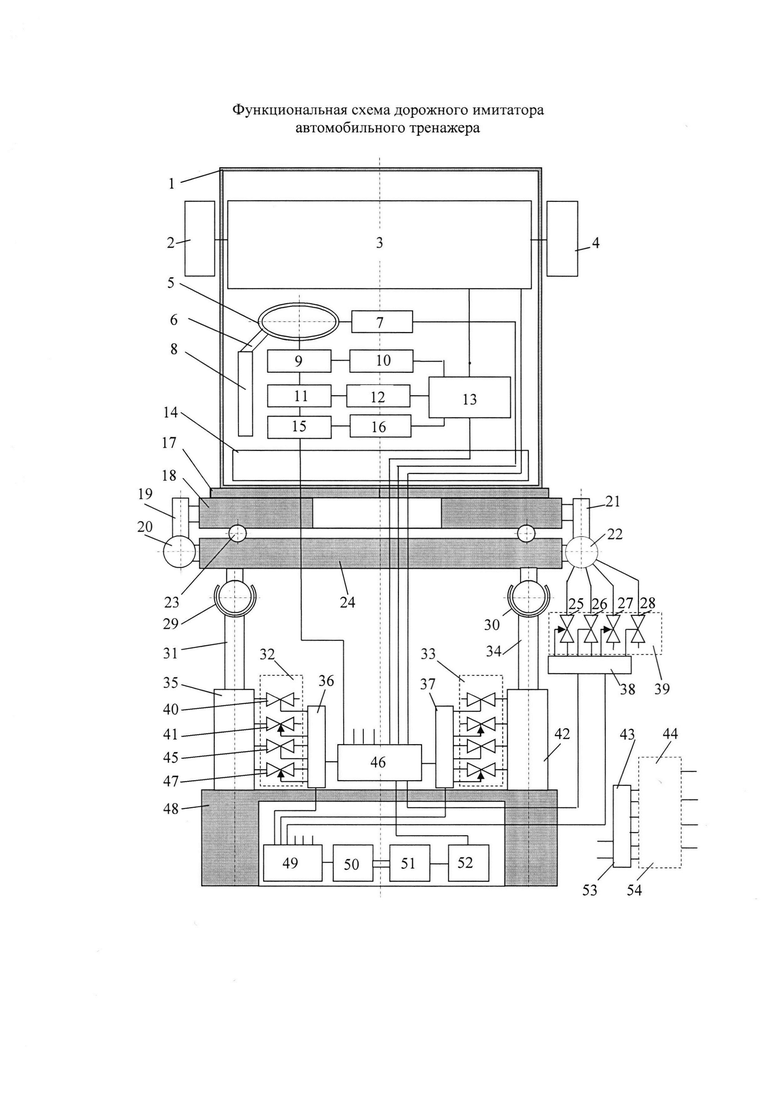
На рисунке приведена функциональная схема предлагаемого дорожного имитатора тренажера транспортного средства.
Дорожный имитатор тренажера транспортного средства (далее - имитатор) содержит кабину 1 автомобиля, рулевое колесо 5 с колонкой 6, датчик поворота 7 рулевого колеса 5 на рулевой колонке 8, органы управления автомобилем 11, 15, расположенные в кабине 1, кресло водителя 14, микропроцессорное устройство автомобиля 13, с которым соединены контрольно-измерительные приборы 9 через преобразователи сигналов 10, и экран 3 для отображения вида на дорогу, соединенный с микропроцессорным устройством 13 автомобиля. Имитатор содержит основание 48, четыре одинаковых линейных пневмопривода 35, 42, расположенных с вертикальным ходом корпусами на основании 48, четыре шарнирных узла 29, 30, соединенных с подвижными штоками 31, 34 линейных пневмоприводов 35, 42, платформу наклонения 24, соединенную с шарнирными узлами 29, 30, платформу поворотную 18, расположенную на платформе наклонения 24 через подшипники качения 23, два дуговых пневмопривода 20, 22, соединенных корпусами с платформой наклонения 24, а подвижными дуговыми штоками 19, 21 с поворотной платформой 18, ориентированных противоположно друг другу, пневмопривод 7, соединенный с рулевой колонкой 6, компрессор воздушный 50, электродвигатель 51, соединенный с компрессором 50, ресивер 49, соединенный с компрессором 50. Ресивер 50 соединен с семью пневмоприводами посредством семи идентичных комплектов клапанов, четыре комплекта 32, 33, 39, 44 из которых изображены на рисунке. На примере дугового пневмопривода 22 и линейного пневмопривода 35 комплект содержит регулируемый газовый клапан 25, 47 высокого давления, соединенный с ресивером 50 и с пневмоприводом соответственно 22, 35, нерегулируемый газовый клапан 26, 45 с положениями «открыт-закрыт», соединенный параллельно с регулируемым клапаном 25, 47, регулируемый газовый спусковой клапан 27, 41, соединенный с пневмоприводом 22, 45, семь нерегулируемых газовых спусковых клапанов 28, 40 с положениями «открыт-закрыт», соединенных с пневмоприводом. Для управления имитатор содержит центральное микропроцессорное устройство имитатора (ЦМПУИ) 46 с массивами и программой отображения в реальном масштабе времени дороги и окружающего ее рельефа, семь устройств управления 36, 37, 38, 43 клапанами, соединенных с семью группами клапанов 32, 33, 39, 44: группами клапанов четырех линейных пневмоприводов 35, 42, двух дуговых пневмоприводов 20, 22 и рулевой колонки 7.
На рисунке не приведены два линейных пнемопривода, идентичные по комплектности и конструкции приводам 35, 42, и не приведена газовая система с устройством управления пневмопривода 20.
Все устройства управления 36, 37, 38, 43 комплектами клапанов 32, 33, 39, 44 соединены с ресивером 50, оснащены цифроаналоговым преобразователями и соединены с центральным микропроцессором 46.
Имитатор содержит устройство управления 52 электродвигателем 51, соединенное с ЦМПУИ 46, механо-электрические устройства 12, 16, соединенные с механическими органами управления 11, 15 автомобиля, аналого-цифровые преобразователи, встроенные в механо-электрические преобразователи и соединенные с ЦМПУИ 46. Контрольно-измерительные приборы соединены через аналого-цифровые преобразователи 10 с микропроцессором автомобиля и далее с центральным микропроцессорным устройством 46. Для визуализации дороги и окружающей местности ЦМПУ 46 соединен с экраном 3. Задний вид выводится из центрального микропроцессора 46 на боковые экраны-зеркала 2 и 4. Кабина водителя установлена на жестком основании 17, расположеном на поворотной платформе 18.
Дуговые пневмоприводы 20, 22 поворотной платформы 18 имеют свободный ход поворота по и против часовой стрелки. Поршень рабочего штока в корпусе расположен посередине рабочего пневмообъема корпуса. Впуск газа под давлением осуществляется в корпусе со стороны, обратной выходу штока. Рядом расположено отверстие с клапаном выпуска газа из рабочего объема. Для поворота в один пневмопривод напускается через клапаны 25, 26 газ под давлением, а в другом пневмоприводе клапаны 27, 28 выпуска газа открываются. Подача рабочего газа в пневмопривод через регулируемый клапан 25 позволяет имитировать плавные повороты. Впуском газа нерегулируемым клапаном 26 имитируются ударные нагрузки на поворотную платформу и на кабину водителя. Усилия поворота рулевого колеса 5 водителем имитируются пневмоприводом 7, исполняющим функцию демпфера, соединенным с рабочим штоком рулевой колонки 6 и с системой клапанов 44, управляемой системой управления 43. Давление рабочего газа регулируется регулируемыми клапанами впуска и выпуска газа в системе 44, аналогичными 25, 26 (впуск) и 27, 28 (выпуск в рабочий объем демпфера).
Предлагаемый имитатор предназначен для моделирования динамических силовых воздействий на кабину автомобиля при движении с равномерной скоростью по дорогам с разным профилем поверхности и с разными углами поворота при отображении динамики поступательного движения зрительными образами.
Устройство работает следующим образом. Обучаемый занимает место водителя и включает управление автомобилем 9, 11, 15, 13 и рабочие устройства имитатора 52. Включением электродвигателя 51 создается через управление ресивером 50 в ресивере нужное давление.
ЦМПУ 46 выдает на экран 3 изображение дороги с видимым профилем передней части корпуса автомобиля, который пространственно отображается на центральном экране от положения головы водителя, от точки наблюдения. На боковых экранах отображается задний вид дороги. Органами управления 5, 6, 11, 15 обучаемый водитель имитирует управление движением автомобиля по дороге. Перемещение изображения дороги и окружающего рельефа зависит от задаваемой скорости движения и точки наблюдения. Изображение дороги и окружающего рельефа местности изображается на центральном экране 3, расположенном в размерах и форме переднего окна автомобиля. Изображение заднего вида отображается на боковых экранах 3, 4, установленных вместо правого и левого зеркал.
Динамические, ускоряющие воздействия на кабину водителя оказывают поворот рулевого колеса 5 и вертикальный рельеф дороги или поверхности земли, по которой движутся предполагаемые колеса автомобиля.
При повороте рулевого колеса 5 сигнал датчика поворота 7 рулевого колеса поступает в ЦМПУ 46, откуда после обработки поступает на устройство управления дуговыми пневмоприводами 20, 19 и 22, 21. Открыванием регулируемого клапана 25 приводится в действие дуговой пневмопривод 22, который поворачивает платформу поворота 18 относительно платформы наклонения 24 на заданный азимутальный угол, соответствующий углу поворота руля 5. При этом в другом пневмоприводе 20 спусковой клапан, аналогичный клапану 27, открывается и рабочий шток 19 пневмопривода 20 имеет свободный ход, не противодействуя повороту. На левый и правый повороты работают соответственно правый 22 или левый 20 пневмоприводы. При обратном вращении руля включается в работу пневмопривод 20 противоположного поворота (направо), а в работавшем пневмоприводе 22 открывется регулируемый спусковой клапан 27. При необходимости вместе с 27 открывается и нерегулиремый клапан 28.
Воздействие вертикального рельефа дороги на автомобиль и на кабину водителя имитируется четырьмя вертикальными линейными пневмоприводами 35, 42 (и такая же пара), воздействующими на платформу наклонения 24. Независимое изменение давления в каждом пневмоприводе позволяет наклонять платформу наклонения 24 и кабину 1, расположенную на жесткой платформе 17, в любую сторону. Шарнирные соединения 29, 30 (и такая же пара) позволяют оказывать вертикальное силовое воздействие на платформу наклонения 24 независимо от положения рабочих штоков 31, 34 (и такая же пара) других пнемоприводов. Плавным изменением давления в пневмоприводах осуществляется имитация плавной топологии дороги. Препятствия и ямки, соразмерные с диаметром колес, вызывают ударный воздействия, что имитируется с помощью нерегулируемых клапанов 45, 40 резкой подачей 45 и выпуском газа 40 в пневмоприводах. Управление работой клапанов осуществляется согласованием работы устройств управления 32, 33 (и такая же пара) клапанами пневмоприводов 39, 42 с программой рельефа дороги. При наличии вертикальных изменений функции изображения дороги в программе предусматривается либо плавное изменение управляющего сигнала, либо резкое его изменение. Скорость изменения управляющего клапанами сигнала пропорциональна производной функции вертикальной топологии трехмерного изображения дороги. Пропорциональность величины функции обеспечивается усилителями мощности в устройствах управления 36, 37 клапанами 32, 33, а также величиной давления рабочего газа в ресивере 49.
Четыре линейных вертикальных пневмопривода 32, 33 позволяют наклонять платформу наклонения 24 в любую сторону на углы, допускаемые техническими условиями транспортного средства, и моделировать воздействие ухабов и вертикально возвышающихся препятствий. Так как отклонения профиля дороги могут быть как вверх, так и вниз, то вертикальные пневмоприводы приводятся в среднее положение, которое поддерживается регулируемыми клапанами типа 47, 41. При наличии вертикального препятствия на передние и задние пневмоприводы последовательно с учетом скорости движения автомобиля подаются импульсы кратковременного подъема и возврата штоков 31, 34 с помощью устройств управления 36, 37 и клапанов 32, 33 (и такие же пары). Кратковременные подъемы и возвраты штоков осуществляются нерегулируемыми клапанами типа 45, 40. Высота подъема или ухабы моделируются давлением в ресивере и длительностью открытого состояния клапана. Пологие возвышения и ухабы моделируются регулируемыми клапанами.
При наклоне дороги, например на подъеме, на устройства управления двух передних вертикальных пневмоприводов поступает сигнал, открывающий регулируемые клапаны согласно наклону дороги. При снижении угла подъема регулируемым спусковым клапаном давление в переднем пневмоприводе снижается, и штоки передних пневмоприводов опускаются, угол наклона кабины уменьшается. Таким же образом с помощью клапанов осуществляется наклон кабины вперед при спуске, наклон назад при подьеме, а с помощью парной работы боковых клапанов - боковые наклоны.
Автономное управление пневмоприводами каждым в отдельности позволяет одновременно осуществлять поворот, наклон и моделирование дорожных неровностей.
Таким образом, предлагаемый имитатор дорожный тренажера транспортного средства позволяет осуществлять воздействие на обучаемого водителя зрительными образами переднего и заднего видов, силовыми воздействиями поворота кабины и в том числе водителя, силовыми воздействиями плавных подъемов, спусков, боковых наклонов с вертикальными положительными и отрицательными ускорениями и ударными воздействиями при поворотах и в зависимости от неровностей дороги.
Сопоставительный анализ показывает, что динамическое воздействие на кабину, а соответственно, на обучаемого водителя позволяет дополнительно к зрительным образам и моторным действиям по управлению осуществлять динамическое воздействие на рецепторно-мышечную систему обучаемого посредством механических перемещений кабины автомобиля-тренажера. Это существенно повышает эффективность обучения в условиях, приближаемых к реальным по воздействию дорожного рельефа и поворотов. Выработка мышечных рефлексов существенно повышает усвоение практики вождения автомобиля и может сократить срок обучения для приобретения навыков в сравнении с обучением зрительными образами и, соответственно, затраты на обучение в 1.2-1.5 раза. Однако более важным эффектом является приобретение моторных навыков избегания аварийных ситуаций, что может оцениваться улучшением показателей среднестатистических ожидаемых экономических и социальных потерь.
Технико-экономическое обоснование на предлагаемое изобретение «Имитатор дорожный транспортного средства»
В предлагаемом изобретении динамическое воздействие на кабину, а соответственно, на обучаемого водителя позволяет дополнительно к зрительным образам и моторным действиям по управлению осуществлять динамическое воздействие на рецепторно-мышечную систему обучаемого посредством механических перемещений кабины автомобиля-тренажера. Это существенно повышает эффективность обучения в условиях, приближаемых к реальным по воздействию дорожного рельефа и поворотов. Выработка мышечных рефлексов существенно повышает усвоение практики вождения автомобиля и может сократить срок обучения для приобретения навыков в сравнении с обучением зрительными образами и, соответственно, затраты на обучение в 1.2-1.5 раза. Однако более важным эффектом является приобретение моторных навыков избегания аварийных ситуаций, что может оцениваться улучшением показателей среднестатистических ожидаемых экономических и социальных потерь. Десятки тысяч потерь человеческих жизней ежегодно в дорожном движении заставляют прежде всего учитывать фактор социальных потерь и создать объективные материально-технические условия уменьшения потерь человеческих жизней.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИМИТАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2403942C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| Тренажер транспортного средства | 1987 |
|
SU1508265A1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
| УСТРОЙСТВО СТАШЕВСКОГО И.И. ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ АВТОМОБИЛЯ | 1999 |
|
RU2171501C2 |
| ЧЕТЫРЕХОСНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684226C1 |
| Тренажер для водителей транспортных средств | 1988 |
|
SU1626260A1 |
| Автомобильный тренажер | 1980 |
|
SU963068A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ В СТАЦИОНАРНЫХ УСЛОВИЯХ ВРЕМЕНИ ЗРИТЕЛЬНО-МОТОРНОЙ РЕАКЦИИ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА НА ОПАСНЫЕ ДОРОЖНЫЕ СИТУАЦИИ | 2011 |
|
RU2475186C2 |
| УПРАВЛЕНИЕ ПРЕИМУЩЕСТВЕННО РУЛЕВОГО ТИПА | 2004 |
|
RU2278796C2 |
Изобретение относится к области организации дорожного движения, в частности к техническим средствам обучения вождению автотракторной техники. Имитатор дорожный содержит кабину автомобиля, рулевую колонку, органы управления автомобилем, расположенные в кабине, кресло водителя, микропроцессорное устройство автомобиля, с которым соединены контрольно-измерительные приборы, и экран для отображения вида на дорогу. Кабина автомобиля установлена на поворотной платформе, расположенной на платформе наклонения через подшипники качения. Поворотная платформа расположена на платформе наклонения через подшипники качения. Для приближения обучения к реальным условиям используются группы пневмоприводов и центральное микропроцессорное устройство имитатора (ЦМПУИ) с массивами и программой отображения в реальном масштабе времени дороги и окружающего ее рельефа. Техническим результатом является повышение эффективности обучения в условиях, приближаемых к реальным по воздействию дорожного рельефа и поворотов. 1 ил.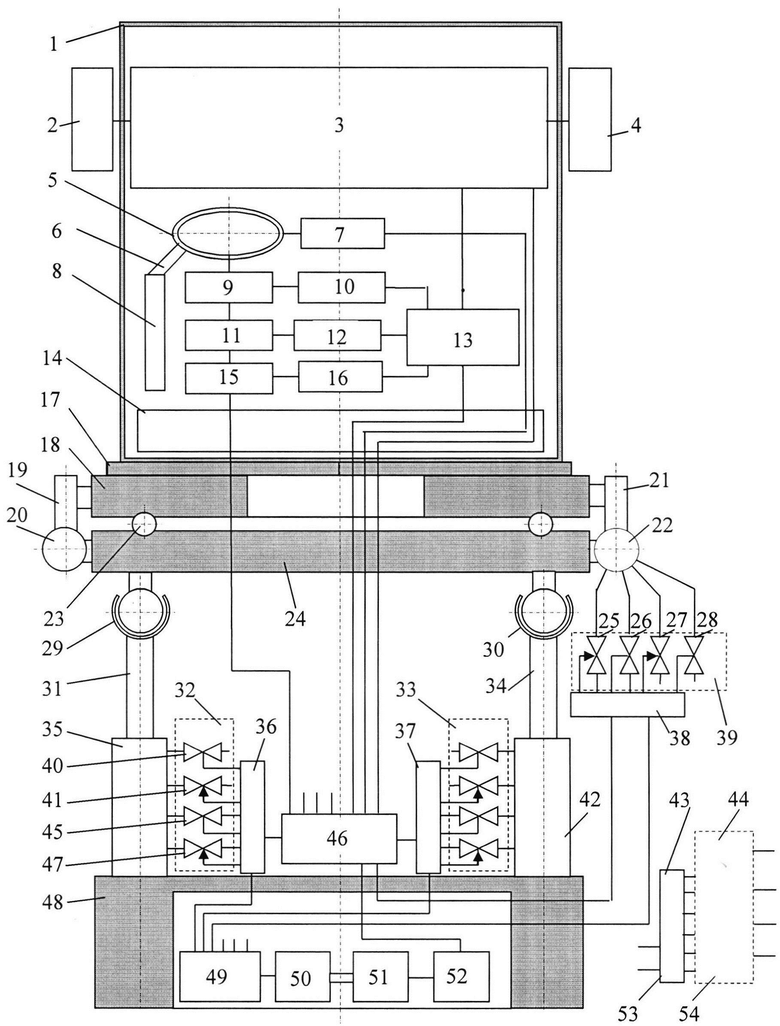
Имитатор дорожный, содержащий кабину автомобиля, рулевую колонку, органы управления автомобилем, расположенные в кабине, кресло водителя, микропроцессорное устройство автомобиля, с которым соединены контрольно-измерительные приборы, и экран для отображения вида на дорогу, соединенный с микропроцессорным устройством автомобиля, отличающийся тем, что дополнительно содержит основание, четыре линейных пневмопривода, расположенных с вертикальным ходом корпусами на основании, четыре шарнирных узла, соединенных с подвижными штоками линейных пневмоприводов, платформу наклонения, соединенную с шарнирными узлами, платформу поворотную, расположенную на платформе наклонения через подшипники качения, два дуговых пневмопривода, соединенных корпусами с платформой наклонения, а подвижными дуговыми штоками с поворотной платформой, ориентированных противоположно друг другу, пневмопривод, соединенный с рулевой колонкой, компрессор воздушный, электродвигатель, соединенный с компрессором, ресивер, соединенный с компрессором, семь регулируемых газовых клапанов высокого давления, соединенных с ресивером и с пневмоприводами, семь нерегулируемых газовых клапанов с положениями «открыт-закрыт», соединенных параллельно с регулируемыми клапанами, семь регулируемых газовых спусковых клапанов, соединенных с пневмоприводами, семь нерегулируемых газовых спусковых клапанов с положениями «открыт-закрыт», соединенных с пневмоприводами, пневмопривод, соединенный с рулевой колонкой, центральное микропроцессорное устройство имитатора (ЦМПУИ) с массивами и программой отображения в реальном масштабе времени дороги и окружающего ее рельефа, семь устройств управления клапанами, соединенных с группами клапанов пневмоприводов, семь цифроаналоговых преобразователей, соединенных с устройствами управления и с центральным микропроцессорным устройством имитатора, устройство управления электродвигателем, соединенный с ЦМПУИ, механо-электрические устройства, соединенные с механическими органами управления автомобиля, аналого-цифровые преобразователи, соединенные с механо-электрическими преобразователями и с ЦМПУИ, при этом кабина водителя расположена на поворотной платформе.
| Имитатор внешней визуальной обстановки тренажера транспортного средства | 1987 |
|
SU1504659A1 |
| US 6431872 B1, 13.08.2002 | |||
| WO 2014198861 A1, 18.12.2014. | |||

