Изобретение относится к средствам для обучения водителей, в частности тренажерам, и может быть использовано для обучения вождению самоходными безрельсовыми транспортными средствами, а также для повышения квалификации водителей с моделированием условий реальной дорожной обстановки, в том числе с созданием экстремальных ситуаций, при обучении в реальном времени и контроля качества обучения, которые создают аварийную ситуацию при возникновении заноса автомобиля на скользком покрытии дороги.
Известен тренажер транспортного средства (патент РФ №2320022), который содержит тележку и кресло водителя с рулевым колесом. Тележка имеет четыре колеса и может двигаться по наклонным рельсам, кресло водителя установлено на шарикоподшипнике. Поворотное устройство вращает кресло водителя во время движения и имитирует неровности дороги во время движения, а упругие трубы осуществляют бортовое столкновение или занос кресла водителя. Данный тренажер позволяет укреплять вестибулярную устойчивость к ускорениям, перегрузкам и вращению, вырабатывать реакции при заносах, ударах и бортовых столкновениях транспортных средств.
Недостатком указанного устройства является невозможность проводить обучение в автомобиле заводского производства, отсутствие возможности у обучаемого адаптироваться и привыкать к реальным габаритным размерам автомобиля и рабочему месту водителя, а также создавать изменение пространственного положения реального автомобиля относительно его вертикальной оси для имитации процесса возникновения заноса на скользком покрытии дороги. Это означает, что отработка реакций и воздействий водителя на органы управления автомобилем при заносах не может быть полноценной.
Известен автомобильный тренажер (Патент РФ №74506) состоящий из рабочего места водителя, представляющего из себя автомобиль на колесах с автомобильными аналоговыми органами управления с датчиками, дискретными органами управления с датчиками и акустической системой, системы отображения для водителя, рабочего места инструктора, содержащего ПЭВМ со специальным программным обеспечением и системой отображения, обеспечивающего возможность подготовки, настройки параметров моделей ситуаций для проведения сеансов обучения водителя и сохранения результатов сеансов обучения, систему анализа действия водителя и модуль программных средств управления.
Недостатками этого тренажера являются невозможность создания дорожных ситуаций, максимально приближенных к экстремальным, и оперативного вмешательства инструктора в создание дорожных ситуаций, статичное положение автомобиля на тренажере и невозможность имитации положения автомобиля в пространстве при потере боковой устойчивости в случае возникновения заноса на скользкой дороге.
Известен автомобильный тренажер (Патент РФ №101567), состоящий из рабочего места водителя, представляющего из себя автомобиль на колесах с автомобильными аналоговыми органами управления с датчиками, дискретными органами управления с датчиками и акустической системой, системы отображения для водителя, рабочего места инструктора, содержащего ПЭВМ со специальным программным обеспечением и системой отображения для водителя, обеспечивающих возможность подготовки, настройки параметров моделей ситуаций для проведения сеансов обучения водителя и сохранения результатов сеансов обучения, систему анализа действия водителя и программные средства управления. Указанный тренажер снабжен вычислительно-управляющим комплексом, обеспечивающим формирование визуальной обстановки для системы отображения и звуковых сигналов акустической системы рабочего места водителя, включающим системы моделирования динамических объектов, имитации визуальной обстановки, формирования звуковых сигналов, управления программой и систему согласования для синхронизации работы всех систем тренажера и управления программными средствами, а рабочее место инструктора дополнительно снабжено аналоговыми и дискретными органами управления с датчиками для имитации органов управления автомобилем, обеспечивающими имитацию управления автомобилем с участием инструктора в сеансе обучения водителя в режиме синхронной работы с рабочим местом водителя. При этом первый, второй, третий и четвертый выходы системы согласования вычислительно-управляющего комплекса соединены с входом системы формирования звуковых сигналов, с первым входом системы имитации визуальной обстановки, со входом системы моделирования динамических объектов и со входом панели приборов соответственно; первый и второй входы-выходы системы согласования соединены со входами-выходами ПЭВМ, со входами-выходами аналоговых органов управления с датчиками соответственно; второй и первый входы системы согласования соединены с выходами системы управления программой и дискретных органов управления с датчиками, а первый, второй, третий, четвертый, пятый, шестой входы ПЭВМ соединены с органами управления ПЭВМ, дискретными органами управления с датчиками для инструктора, аналоговыми органами управления с датчиками для инструктора соответственно.
Недостатком данного тренажера является статичное положение автомобиля на тренажере и невозможность имитации положения автомобиля в пространстве при потере боковой устойчивости в случае возникновения заноса на скользкой дороге.
Цель изобретения заключается в создании тренажерного устройства, создающего пространственное положение реального автомобиля при возникновении заноса на скользкой дороге и позволяющего научить водителя стабилизировать положение автомобиля для предотвращения аварии.
Указанная цель достигается, созданием динамического стенда-тренажера устойчивого вождения автомобиля, содержащего автомобиль, с задними ведущими колесами, установленный на платформу включающую, блоки беговых барабанов по числу ведущих колес, так что задние колеса автомобиля установлены на беговые барабаны, с платформой содержащей поворотные площадки по числу передних управляемых колес, на которые передними колесами установлен автомобиль. Платформа выполняется с возможностью поворота относительно вертикальной оси в двух противоположных направлениях, включаемого тренером и с возможностью управления приводом платформы, посредством поворотных площадок, в зависимости от угла их поворота.
Технический результат изобретения тренажерное устройство, создающего пространственное положение реального автомобиля при возникновении заноса на скользкой дороге и позволяющего научить водителя стабилизировать положение автомобиля для предотвращения аварии.
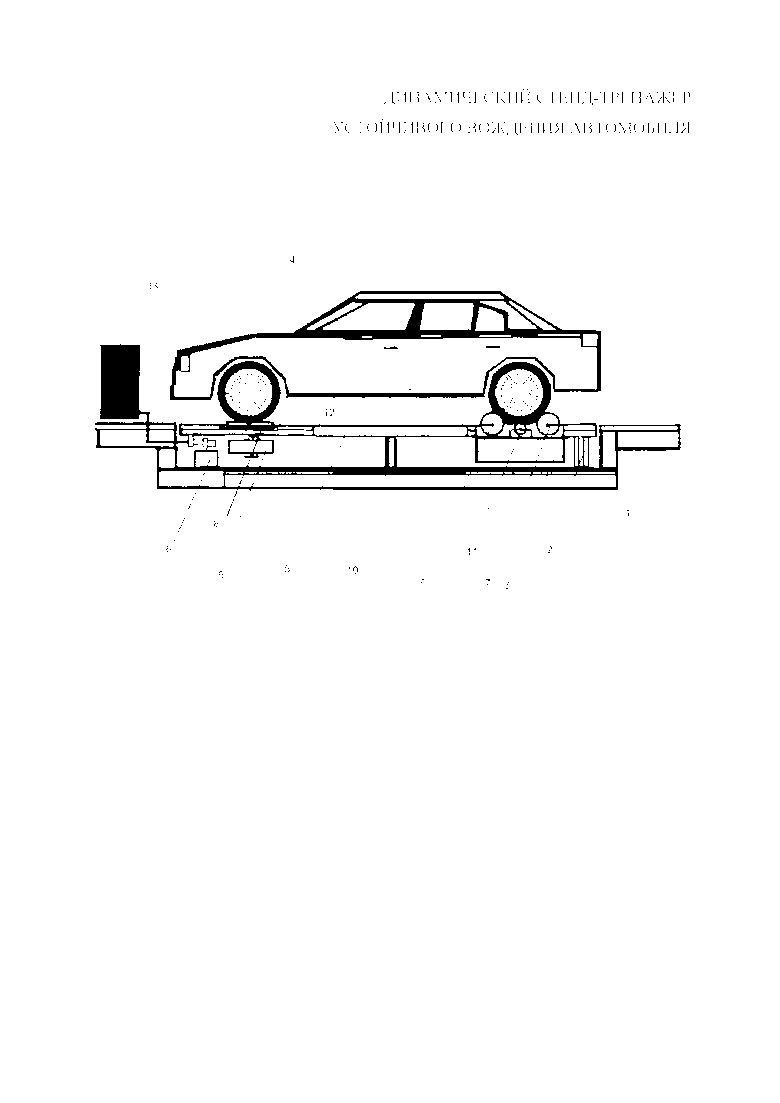
Изобретение поясняется чертежом, на котором представлен динамический стенд-тренажер устойчивого вождения автомобиля включающий приямок с установленным в него каркасом (1) поворотного модуля, поворотный модуль имитации заноса автомобиля с платформой вращения (5), блок (3) беговых барабанов (7), поворотные площадки передних управляемых колес (8) с резиновыми накладками (12), автомобиль заводского производства (4), блок управления передними колесами (9) с системой переключения приводных моторов, блок управления направлением кругового движения поворотной платформы (13). Поворотный модуль имеет центральную опору с дренажной трубкой (10) для отвода влаги и приводится во вращение по кругу приводными моторами (6) расположенными в блоке (9) и имеет опорные ролики (2) по окружности вращения. Автомобиль (4) устанавливается задними ведущими колесами на беговые барабаны (7) один из которых - центральный (11) является опорным и располагается под колесом. Передними колесами автомобиль устанавливается на поворотные площадки, которые дают возможность имитировать падение сопротивления дороги на скользком покрытии и упрощают работу рулем при тренировках. Как беговые барабаны, так и поворотные площадки передних колес вращаются свободно. Конструкция блока беговых барабанов дает возможность обеспечить неподвижное положение автомобиля при работающем двигателе и обеспечить привод ведущих колес на месте.
Изобретение работает следующим образом. Автомобиль заводского производства с задними ведущими колесами устанавливается на поворотный модуль кругового движения. Задние колеса автомобиля опираются на беговые барабаны, а передние колеса на поворотные площадки. Для моделирования положения автомобиля в процессе заноса на скользкой дороге, поворотный модуль приводится в круговое движение приводными моторами, которые обеспечивают движение поворотной платформы в правую или в левую стороны. При изменении пространственного положения автомобиля начинается тренировка водителя по воздействию на руль для обучения принципам стабилизации автомобиля. При повороте руля в сторону заноса автомобиля, производится порот поворотных площадок вместе с колесами, что приводит к переключению приводных моторов и поворотная платформа начинает движение в обратную сторону, таким образом, имитируя процесс стабилизации положения автомобиля. Беговые барабаны, на которые опираются задние ведущие колеса автомобиля, установлены в корпус поворотного модуля и приводятся в свободное вращение относительно собственной горизонтальной оси колесами автомобиля, позволяя обеспечить полноценный режим работы привода задних ведущих колес при неподвижном положении автомобиля. Такая конструкция блока беговых барабанов дает возможность проводить тренировки первоначальных управляющих воздействий водителя на систему привода ведущих колес при неподвижном автомобиле. Поворотные площадки для передних управляемых колес, установленные в корпус блока переключения направления движения поворотной платформы, обеспечивают возможность переключения привода поворотной платформы, а также формирование первоначальных реакций водителя по воздействию на рулевое колесо при заносе автомобиля и низком сопротивлении со стороны дороги.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБУЧЕНИЯ РУЛЕНИЮ НА МЕСТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2709339C1 |
| Устройство для имитации заноса автомобиля с передним приводом | 2021 |
|
RU2782551C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2131146C1 |
| ИМИТАТОР ДОРОЖНЫЙ ТРЕНАЖЁРА ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2652696C2 |
| АВТОБУСНЫЙ ТРЕНАЖЕР | 2011 |
|
RU2467400C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ВОЖДЕНИЮ ВОЕННЫХ ГУСЕНИЧНЫХ МАШИН С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2542694C1 |
| ТРЕНАЖЕР ДЛЯ ПОДГОТОВКИ МЕХАНИКОВ-ВОДИТЕЛЕЙ ПОДВИЖНЫХ КОМПЛЕКСОВ ВООРУЖЕНИЯ | 2019 |
|
RU2711047C1 |
| СПОСОБ ОБУЧЕНИЯ ВОЖДЕНИЮ БОЕВОГО ТРАНСПОРТНОГО СРЕДСТВА И ТРЕНАЖЕР ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2019 |
|
RU2709344C1 |
| КОМПЬЮТЕРНЫЙ ТРЕНАЖЕР НАЧАЛЬНОЙ ПОДГОТОВКИ МЕХАНИКА-ВОДИТЕЛЯ | 2001 |
|
RU2190256C1 |
| Учебное устройство для дозирования усилия на педаль сцепления транспортного средства при начале движения | 2022 |
|
RU2805237C1 |
Изобретение относится к средствам для обучения водителей, в частности к тренажерам, и может быть использовано для обучения вождению самоходными безрельсовыми транспортными средствами, а также для повышения квалификации водителей с моделированием условий реальной дорожной обстановки, в том числе с созданием экстремальных ситуаций, при обучении в реальном времени и контроля качества обучения, которые создают аварийную ситуацию при возникновении заноса автомобиля на скользком покрытии дороги. Динамический стенд-тренажер устойчивого вождения автомобиля содержит автомобиль с задними ведущими колесами, установленный на платформу включающую, блоки беговых барабанов по числу ведущих колес, так что задние колеса автомобиля установлены на беговые барабаны. Платформа содержит поворотные площадки по числу передних управляемых колес, на которые передними колесами установлен автомобиль. Платформа выполняется с возможностью поворота относительно вертикальной оси в двух противоположных направлениях, включаемого тренером, и с возможностью управления приводом платформы, посредством поворотных площадок, в зависимости от угла их поворота. Повышается качество обучения. 1 ил. 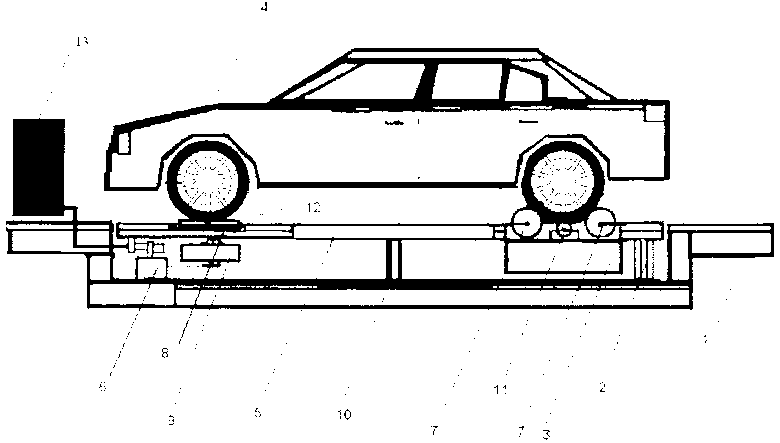
Динамический стенд-тренажер устойчивого вождения автомобиля, содержащий автомобиль с задними ведущими колесами, установленный на платформу, включающую блоки беговых барабанов по числу ведущих колес, так что задние колеса автомобиля установлены на беговые барабаны, отличающийся тем, что платформа содержит поворотные площадки по числу передних управляемых колес, на которые установлен автомобиль передними колесами, платформа выполнена с возможностью поворота относительно вертикальной оси в двух противоположных направлениях, включаемого тренером, и с возможностью управления приводом платформы, посредством поворотных площадок, в зависимости от угла их поворота.
| US 8632339 B2, 21.01.2014 | |||
| US 6354838 B1, 12.03.2002 | |||
| Тренажер для обучения управлению автомобилем | 1974 |
|
SU609118A1 |

