Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу оценки собственного положения и устройству оценки собственного положения.
Уровень техники
[0002] Технология, описанная в PTL 1, является известной в качестве технологии для оценки положения движущегося тела посредством обнаружения относительного положения между известной целью и движущимся телом.
Робот, описанный в PTL 1, корректирует результат оценки собственного положения робота на основании информации о смещении положения между картой окружения, указывающей область с возможностью движения посредством данных о группе точек, и информацией об окружающей обстановке, указывающей результат обнаружения лазерного дальномера, установленного в роботе, посредством данных о группе точек.
Список цитируемых источников
Патентная литература
[0003] PTL 1: JP 2008-250 906 A
Раскрытие изобретения
Техническая задача
[0004] В движущемся теле с установленным датчиком, обнаруживающим относительное положение между целью и движущимся телом, ориентация датчика изменяется в зависимости от изменений положения в ответ на изменения поведения движущегося тела, тем самым вызывая погрешность в результате обнаружения относительного положения.
Задача настоящего изобретения состоит в предотвращении снижения точности оценки положения для движущегося тела вследствие погрешности, даже когда погрешность вследствие изменения поведения движущегося тела возникает в относительном положении относительно цели, обнаруженной датчиком, установленным в движущемся теле.
Решение проблемы
[0005] Согласно аспекту настоящего изобретения предусмотрен способ оценки собственного положения, включающий в себя: обнаружение относительного положения цели, находящейся около движущегося тела, относительно движущегося тела; корректировку относительного положения на основании интервала перемещения движущегося тела и накопления скорректированного относительного положения в качестве данных о положении цели. Среди накопленных данных о положении цели, данные о положении цели для относительного положения, обнаруженного в течение периода, в котором величина изменения поведения движущегося тела меньше порогового значения, сопоставляются с картографической информацией для оценки текущего положения движущегося тела.
[0006] Задачи и преимущества изобретения будут реализованы и получены посредством элементов и комбинаций, детально указанных в формуле изобретения. Следует понимать, что и упомянутое выше общее описание, и нижеследующее подробное описание являются примерными и пояснительными, а не ограничивающими изобретение.
Краткое описание чертежей
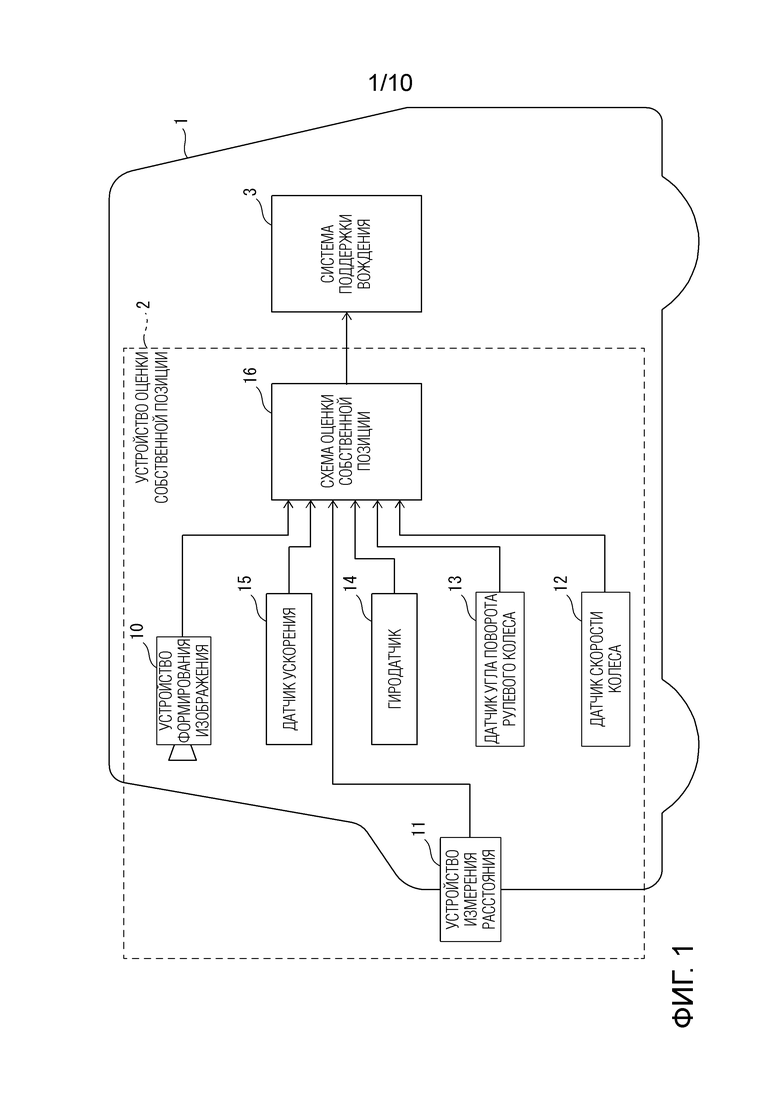
[0007] Фиг. 1 является блок-схемой одного примера схематичной структуры транспортного средства с установленным устройством оценки собственного положения варианта осуществления;
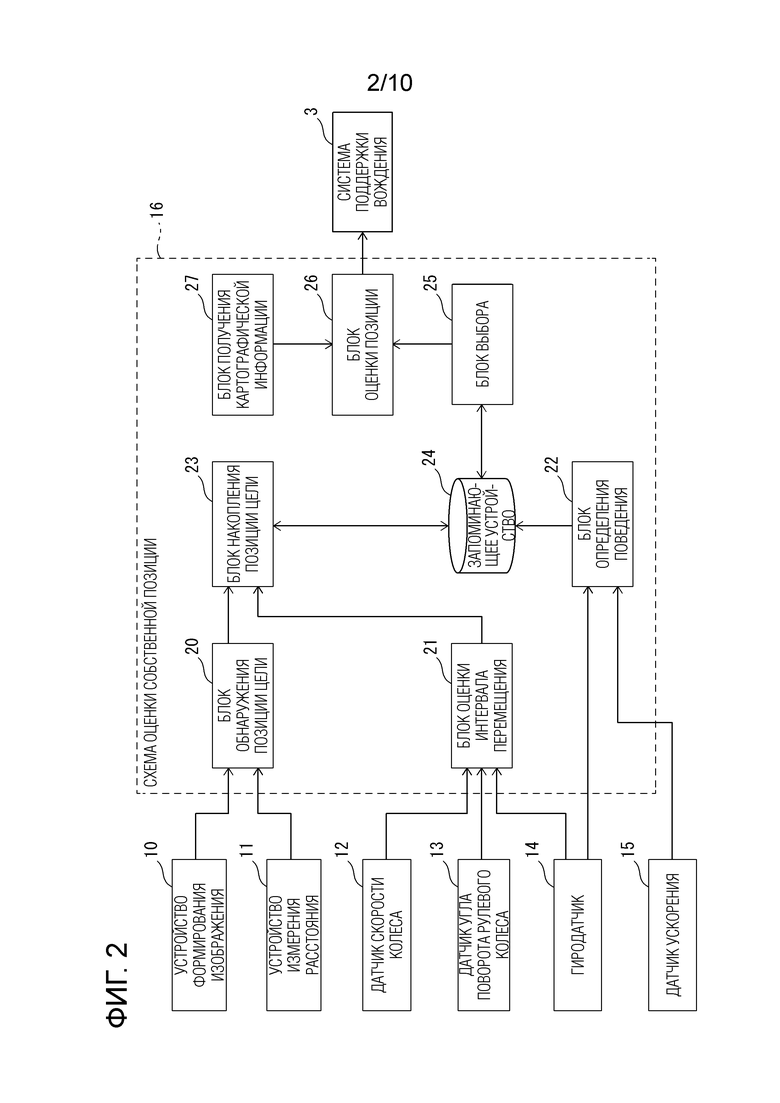
Фиг. 2 является блок-схемой одного примера схематичной структуры схемы оценки собственного положения;
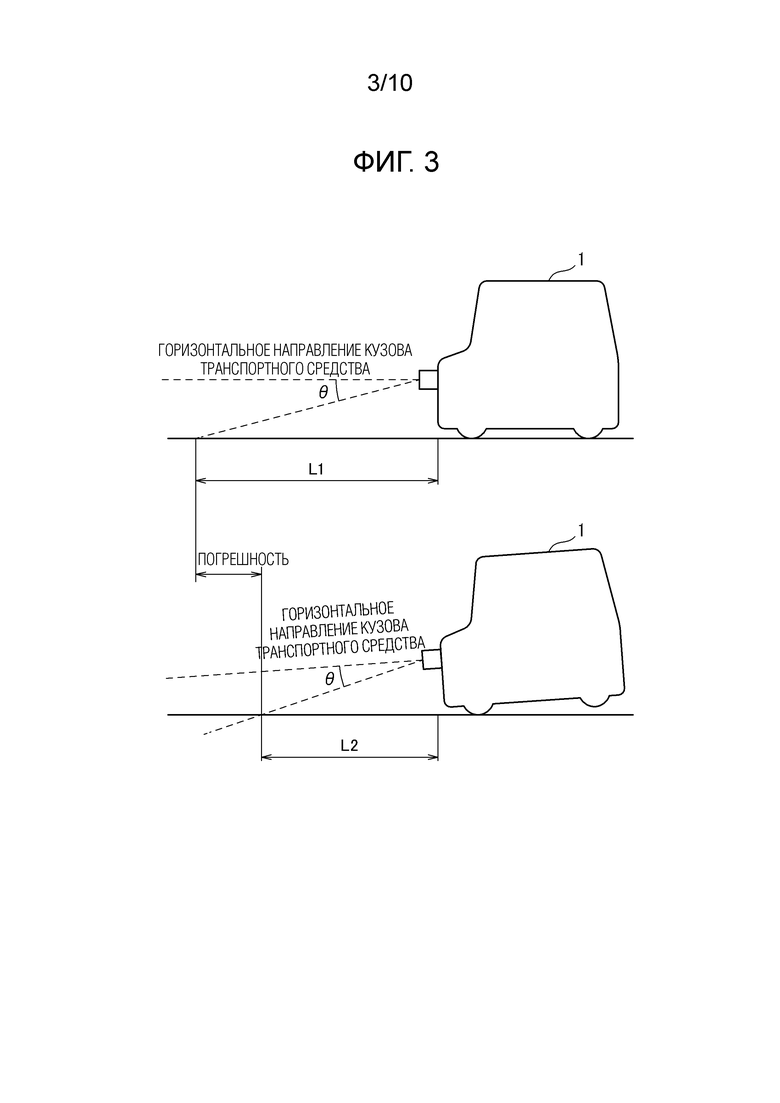
Фиг. 3 является иллюстративной схемой погрешности измерения относительного положения цели, вызванной наклоном относительно поперечной оси транспортного средства;
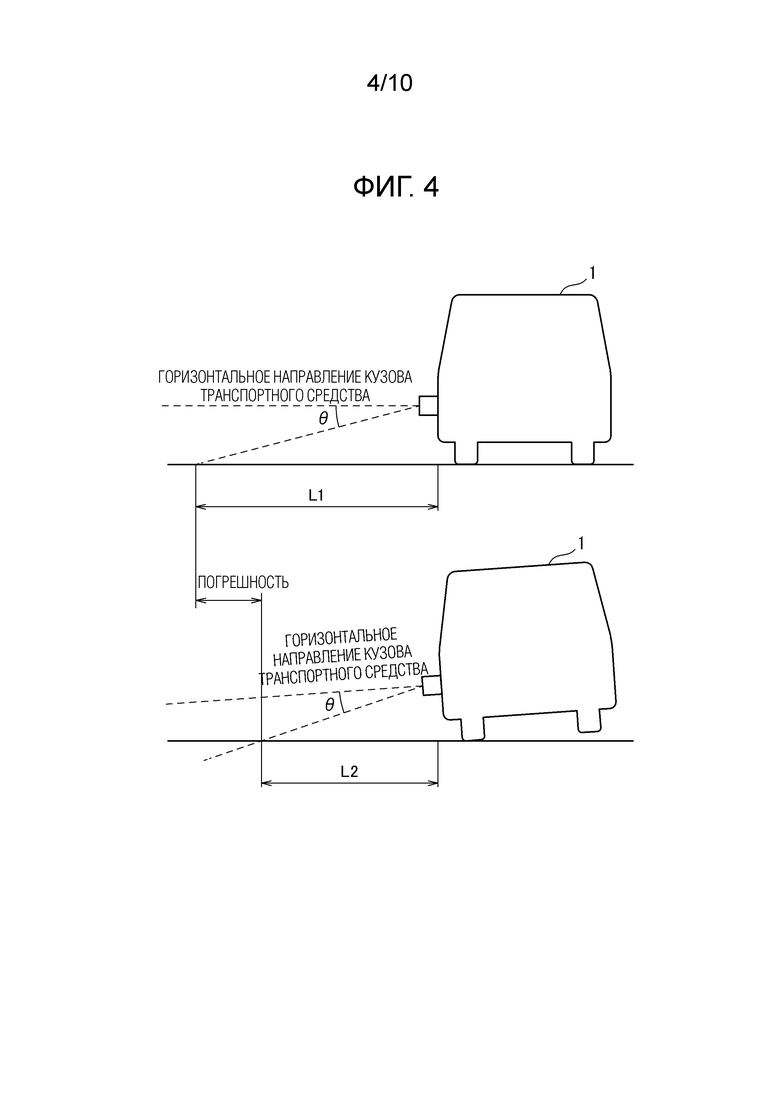
Фиг. 4 является иллюстративной схемой погрешности измерения относительного положения цели, вызванной наклоном относительно продольной оси транспортного средства;
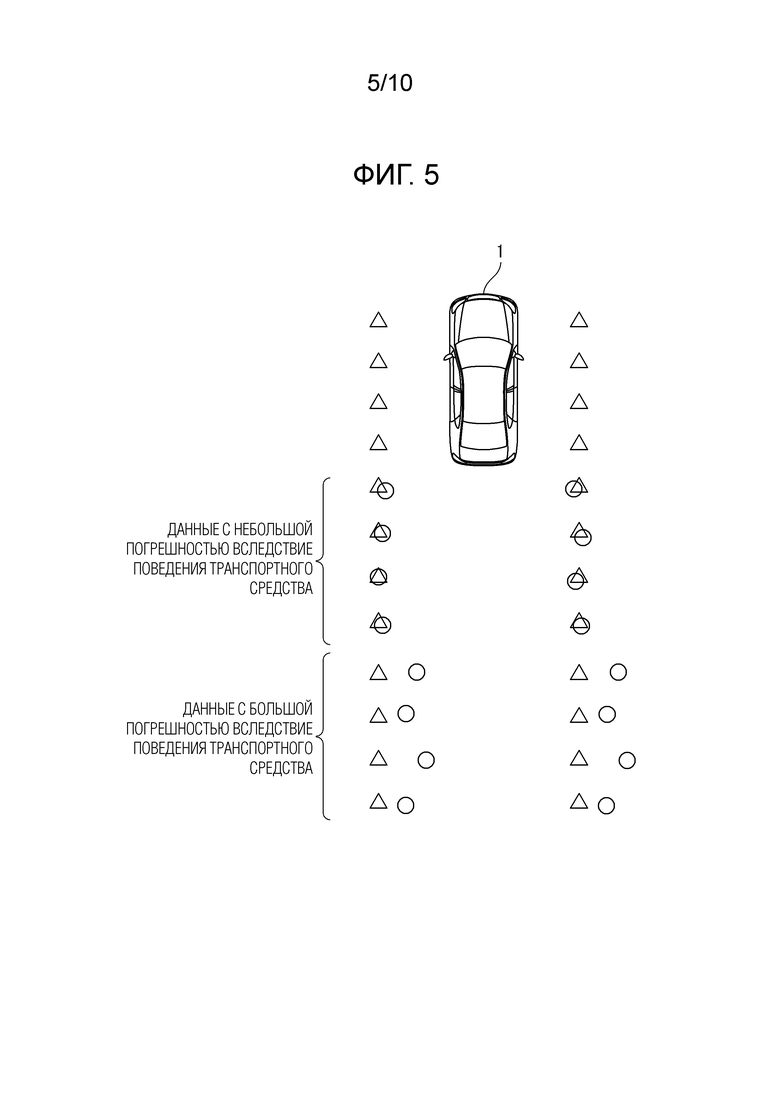
Фиг. 5 является иллюстративной схемой выбранных данных о положении цели;
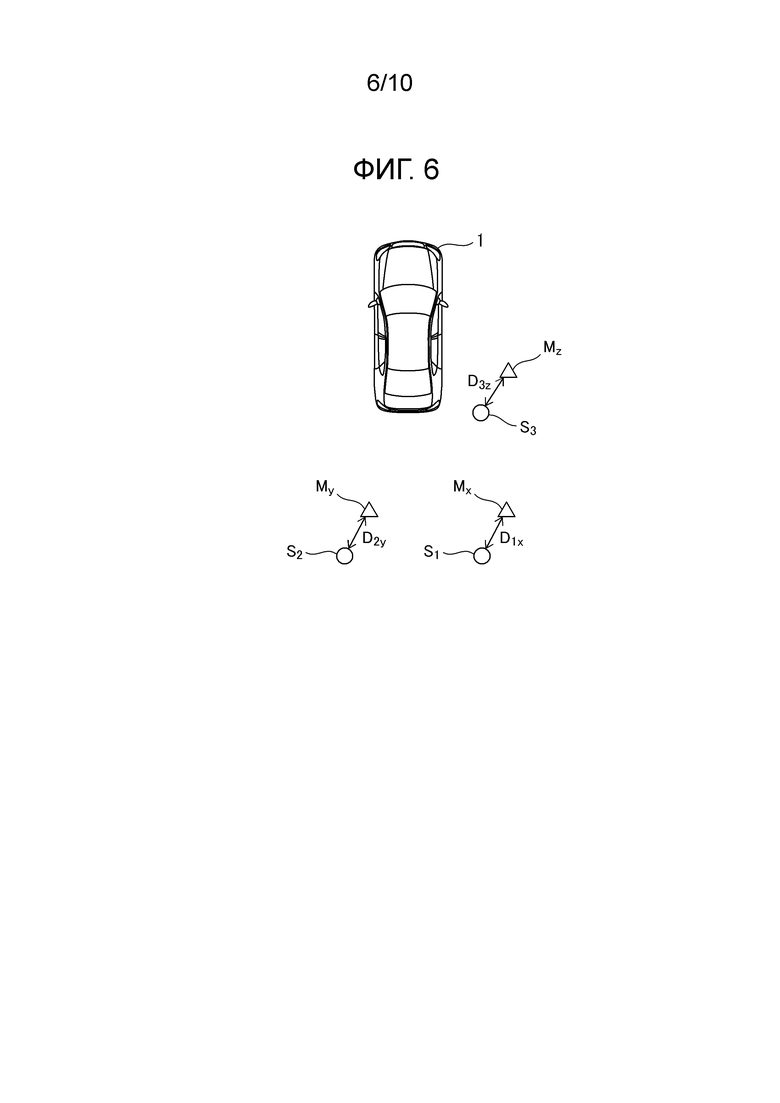
Фиг. 6 является иллюстративной схемой одного примера способа оценки для собственного положения посредством сопоставления данных о положении цели с картографической информацией;
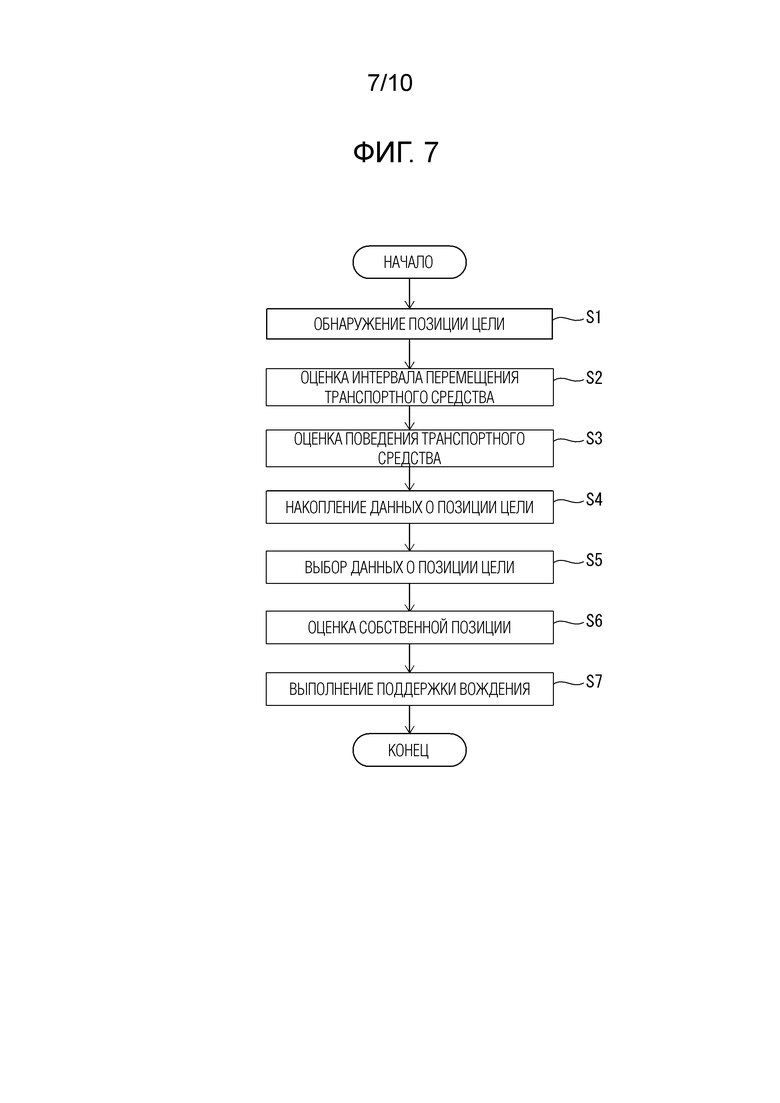
Фиг. 7 является блок-схемой, иллюстрирующей один пример способа оценки собственного положения согласно первому варианту осуществления;
Фиг. 8 является блок-схемой, иллюстрирующей один пример способа оценки собственного положения согласно второму варианту осуществления;
Фиг. 9 является блок-схемой одного примера схематичной структуры схемы оценки собственного положения согласно третьему варианту осуществления; и
Фиг. 10 является блок-схемой, иллюстрирующей один пример способа оценки собственного положения согласно третьему варианту осуществления.
Осуществление изобретения
[0008] Далее в данном документе, варианты осуществления настоящего изобретения будут описаны со ссылкой на чертежи.
(Первый вариант осуществления)
(Структура)
Обратимся к фиг. 1. В то время как последующее описание будет дано для оценки текущего положения транспортного средства в качестве одного примера движущегося тела, настоящее изобретение является широко применимым к оценке текущих положений различных движущихся тел, включающих в себя, не ограничиваясь, транспортные средства.
На транспортном средстве 1 установлено устройство 2 оценки собственного положения и система 3 помощи в управлении. Устройство 2 оценки собственного положения включает в себя устройство 10 формирования изображения, устройство 11 измерения расстояния, датчик 12 скорости колеса, датчик 13 угла поворота руля, гиродатчик 14, датчик 15 ускорения и схему 16 оценки собственного положения.
[0009] Устройство 10 формирования изображения устанавливается внутри салона транспортного средства или т.п. транспортного средства 1 и захватывает изображение, например, области впереди транспортного средства 1. Устройство 10 формирования изображения может быть, например, широкоугольной камерой. Устройство 10 формирования изображения выводит захваченное изображение области впереди транспортного средства 1 в схему 16 оценки собственного положения.
Устройство 11 измерения расстояния устанавливается на внешнюю сторону салона транспортного средства или т.п. транспортного средства 1, применяет электромагнитную волну к области впереди транспортного средства 1 и обнаруживает отраженную волну из нее. Устройство 11 измерения расстояния может быть, например, лазерным дальномером. Кроме того, положение установки для устройства 11 измерения расстояния может находиться, например, около капота, бампера, номерного знака, фары или бокового зеркала транспортного средства 1. Устройство 11 измерения расстояния выводит результат измерения в схему 16 оценки собственного положения.
[0010] Датчик 12 скорости колеса формирует предварительно заданное число импульсов скорости колеса каждый раз, когда каждое колесо транспортное средство 1 поворачивается один раз. Датчик 12 скорости колеса выводит импульсы скорости колеса в схему 16 оценки собственного положения.
Датчик 13 угла поворота руля установлен, например, на рулевой колонке, выполненной с возможностью поддержки с возможностью вращения руля транспортного средства 1. Датчик 13 угла поворота руля обнаруживает текущий угол руля, т.е. текущий угол поворота (величину операции рулевого управления) руля, которым водитель осуществляет рулевое управление. Датчик 13 угла поворота руля выводит обнаруженный текущий угол поворота руля в схему 16 оценки собственного положения.
[0011] Гиродатчик 14 обнаруживает скорость рыскания, величину смещения в продольном направлении и величину смещения в поперечном направлении, возникающие в транспортном средстве 1. Гиродатчик 14 выводит обнаруженную скорость рыскания, величину смещения в продольном направлении и величину смещения в поперечном направлении в схему 16 оценки собственного положения.
Датчик 15 ускорения обнаруживает поперечное ускорение G, которое является ускорением/замедлением в поперечном направлении транспортного средства, и ускорение/замедление в продольном направлении, возникающее в транспортном средстве 1. Датчик ускорения 15 выводит обнаруженное поперечное ускорение G и обнаруженное ускорение/замедление в продольном направлении в схему 16 оценки собственного положения.
[0012] Схема 16 оценки собственного положения является электронным схемным устройством, включающим в себя процессор, такой как центральный процессор (CPU), запоминающее устройство и периферийные компоненты.
Схема 16 оценки собственного положения оценивает текущее положение транспортного средства 1 на карте на основании сигналов, принятых от устройства 10 формирования изображения, устройства 11 измерения расстояния, датчика 12 скорости колеса, датчика 13 угла поворота руля, гиродатчика 14 и датчика 15 ускорения, и картографической информации, указывающей положение известной цели на карте. Далее в данном документе текущее положение транспортного средства 1 на карте может называться «собственным положением». Схема 16 оценки собственного положения выводит сигнал собственного положения, указывающий собственное положение, в систему 3 помощи в управлении.
[0013] Система 3 помощи в управлении осуществляет помощь в управлении при управлении транспортным средством 1 водителем с помощью собственного положения, указываемого посредством сигнала собственного положения, принятого от схемы 16 оценки собственного положения.
Одним примером помощи в управлении может быть, например, обеспечение водителю информации, такой как оповещение. Система 3 помощи в управлении может управлять по меньшей мере одним из типа и интенсивности оповещения, которое должно выдаваться водителю согласно собственному положению транспортного средства 1.
Один пример помощи в управлении может быть управлением состоянием движения транспортного средства 1, включающим в себя по меньшей мере одно из управления торможением, управления ускорением и рулевого управления транспортного средства 1. Например, система 3 помощи в управлении может определять, формировать ли тормозное усилие или приводное усилие в транспортном средстве 1 согласно собственному положению транспортного средства 1.
[0014] Далее будет описана структура схемы 16 оценки собственного положения. Обратимся к фиг. 2. Схема 16 оценки собственного положения включает в себя блок 20 обнаружения целевого положения, блок 21 оценки интервала перемещения, блок 22 определения поведения, блок 23 накопления положения цели, запоминающее устройство 24, блок 25 выбора, блок 26 оценки положения и блок 27 получения картографической информации.
Процессор, включенный в схему 16 оценки собственного положения, выполняет компьютерную программу, сохраненную в запоминающем устройстве 24, для выполнения функций блока 20 обнаружения положения цели, блока 21 оценки интервала перемещения, блока 22 определения поведения, блока 23 накопления положения цели, блока 25 выбора, блока 26 оценки положения и блока 27 получения картографической информации.
[0015] Блок 20 обнаружения положения цели принимает захваченное изображение области впереди транспортного средства 1, созданное устройством 10 формирования изображения. Кроме того, блок 20 обнаружения положения цели принимает результат измерения устройства 11 измерения расстояния.
Блок 20 обнаружения положения цели обнаруживает цель, существующую около транспортного средства 1, на основании захваченного изображения области впереди транспортного средства 1 и результата измерения устройства 11 измерения расстояния. Например, блок 20 обнаружения положения цели обнаруживает цель, существующую впереди транспортного средства 1.
Кроме того, блок 20 обнаружения положения цели обнаруживает относительное положение цели относительно транспортного средства 1. Блок 20 обнаружения положения цели выводит сигнал относительного положения, указывающий обнаруженное относительное положение, в блок 23 накопления целевого положения.
При этом, цель может быть, например, линией (такой как разметка полосы) на поверхности дороги для движения, где транспортное средство 1 движется, бордюрным камнем обочины дороги, дорожным ограждением или т.п.
[0016] Блок 21 оценки интервала перемещения принимает импульсы скорости колеса, текущий угол поворота руля и скорость рыскания, соответственно, от датчика 12 скорости колеса, датчика 13 угла поворота руля и гиродатчика 14. На основании сигналов, принятых от датчика 12 скорости колеса, датчика 13 угла поворота руля и гиродатчика 14, блок 21 оценки интервала перемещения оценивает интервал ΔP перемещения транспортного средства 1 до настоящего момента с момента времени, когда собственное положение транспортного средства 1 оценивается в предыдущем цикле обработки. Блок 21 оценки интервала перемещения выводит сигнал интервала перемещения, указывающий оцененный интервал ΔP перемещения, в блок 23 накопления положения цели.
[0017] Блок 22 определения поведения принимает скорость рыскания, интервал смещения в продольном направлении (т.е., величину поворота в продольном направлении) и интервал смещения в поперечном направлении (т.е., величину поворота в поперечном направлении), возникающие в транспортном средстве 1, от гиродатчика 14. Блок 22 определения поведения принимает поперечное ускорение G и ускорение/замедление в продольном направлении от датчика 15 ускорения.
На основании сигналов, принятых от гиродатчика 14 и датчика 15 ускорения, блок 22 определения поведения определяет, в качестве величины изменения поведения транспортного средства 1 по меньшей мере один из интервалов смещения в продольном направлении и поперечном направлении от контрольного статического положения транспортного средства 1, скорость рыскания, поперечное ускорение G и ускорение/замедление в продольном направлении. Блок 22 определения поведения может оценивать скорость рыскания или поперечное ускорение G на основании величины рулевого управления, обнаруженной посредством датчика 13 угла поворота руля.
[0018] Блок 23 накопления положения цели принимает сигнал относительного положения от блока 20 обнаружения положения цели и принимает сигнал интервала перемещения от блока 21 оценки интервала перемещения.
Блок 23 накопления положения цели накапливает относительное положение цели около транспортного средства 1, указанное посредством сигнала относительного положения, в запоминающем устройстве 24.
Кроме того, блок 23 накопления положения цели корректирует относительное положение цели, накопленное в прошлом, в относительное положение относительно текущего положения транспортного средства 1 с помощью истекшего времени до настоящего момента и интервала ΔP перемещения, указанного посредством сигнала интервала перемещения. Другими словами, блок 23 накопления положения цели перемещает относительное положение в направлении, противоположном направлению движения транспортного средства 1, на интервал ΔP перемещения, на который транспортное средство переместилось в течение времени, истекшего до настоящего момента.
[0019] Блок 23 накопления положения цели накапливает данные о положении цели (которые могут далее в данном документе называться «данными о положении цели»), которые являются скорректированным положением, в запоминающем устройстве 24. В этом случае, блок 22 определения поведения добавляет величину изменения поведения, обнаруженную во время обнаружения относительного положения данных о положении цели, в данные о положении цели и сохраняет в запоминающем устройстве 24.
Когда данные о положении цели уже накоплены в запоминающем устройстве 24, блок 23 накопления положения цели обновляет накопленные данные о положении цели с помощью интервала ΔP перемещения, указанного посредством сигнала интервала перемещения. Другими словами, блок 23 накопления положения цели перемещает относительное положение накопленных данных о положении цели в направлении, противоположном направлению движения транспортного средства 1, на интервал ΔP перемещения. После этого блок 23 накопления положения цели перезаписывает относительное положение, относительно перемещенную на интервал ΔP перемещения, в накопленных данных о положении цели.
[0020] Блок 25 выбора выбирает данные о положении цели, которые должны быть использованы для оценки собственного положения транспортного средства 1, среди данных о положении цели, накопленных в запоминающем устройстве 24. Данные о положении цели, которые должны быть выбраны для использования в оценке собственного положения, могут далее в данном документе называться «выбранными данными о положении цели».
Блок 25 выбора может выбирать данные о положении цели, например, для цели около текущего положения транспортного средства 1. Например, блок 25 выбора может выбирать данные о положении цели для цели, находящейся в пределах приблизительно 20 м от текущего положения транспортного средства 1. Данные о положении цели для цели около текущего положения транспортного средства 1 склонны иметь высокую точность положения, поскольку имеет место небольшое накопление погрешностей вследствие корректировки с помощью интервала ΔP перемещения. Например, данные о положении для полосы движения или бордюрного камня, который является границей дороги, являются очень точными с точки зрения поперечного положения на дороге, по которой осуществляется движение.
[0021] Кроме того, когда величина изменения поведения транспортного средства 1 является большой, ориентации устройства 10 формирования изображения и устройства 11 измерения расстояния, которые служат в качестве датчика обнаружения цели, выполненного с возможностью обнаружения относительного положения цели, изменяются вследствие изменения положения транспортного средства 1, тем самым вызывая погрешность в относительном положении цели, обнаруженном посредством датчика.
Обратимся к фиг. 3. Верхняя стадия указывает состояние, когда положение транспортного средства 1 является заданным контрольным статическим положением. Например, контрольное статическое положение может быть положением, когда горизонтальное направление кузова транспортного средства для транспортного средства 1 является параллельным с поверхностью дороги. Нижняя стадия указывает состояние, когда транспортное средство 1 поворачивается в продольном направлении из контрольного статического положения.
[0022] Когда транспортное средство 1 находится в контрольном статическом положении, цель впереди транспортного средства 1, которая находится от транспортного средства 1 на расстоянии L1, обнаруживается в направлении вниз на угол θ от горизонтального направления кузова транспортного средства.
Когда транспортное средство 1 поворачивается в продольном направлении (т.е., когда транспортное средство 1 смещается в продольном направлении), цель на расстоянии L2 от транспортного средства 1 обнаруживается в направлении вниз на тот же угол θ от горизонтального направления кузова транспортного средства. Другими словами, поворот транспортного средства 1 в продольном направлении вызывает ошибочное обнаружение относительного расстояния между транспортным средством 1 и целью, находящейся на расстоянии L2 от транспортного средства 1, как расстояния L1. Это вызывает погрешность измерения (L1 - L2).
[0023] Что касается интервала смещения в продольном направлении, смещение транспортного средства 1 в продольном направлении изменяется вследствие ускорения/замедления или т.п., что может изменять положение обнаружения цели, такой как стоп-линия. Например, когда изменение положения около одного градуса происходит в продольном направлении вследствие замедления посредством тормоза, расстояние до стоп-линии впереди на расстоянии 5 м ошибочно вычисляется как более короткое приблизительно на 30 см. Когда собственное положение оценивается на основании таких данных о положении цели, собственное положение ошибочно вычисляется как более близкая к стоп-линии на 30 см от точного положения, так что существует риск того, что транспортное средство 1 может сойти с желаемого маршрута движения, например, во время поворота направо или налево на перекрестке.
[0024] Таким образом, блок 25 выбора обращается к интервалу смещения в продольном направлении, добавленному к данным о положении цели и сохраненному в качестве величины изменения поведения в запоминающем устройстве 24, и выбирает, в качестве выбранных данных о положении цели, данные о положении цели, в которых интервал смещения в продольном направлении меньше заданного порогового значения. Другими словами, блок 25 выбора выбирает, в качестве выбранных данных о положении цели, данные о положении цели для относительного положения, обнаруженного в течение периода, в котором интервал смещения в продольном направлении меньше порогового значения.
Отметим, что смещение в продольном направлении возникает, когда транспортное средство 1 ускоряется/замедляется. Соответственно, блок 25 выбора может выбирать, в качестве выбранных данных о положении цели, данные о положении цели, в которых ускорение/замедление, сохраненное в качестве величины изменения поведения в запоминающем устройстве 24, меньше заданного порогового значения.
[0025] Обратимся к фиг. 4. Верхняя стадия указывает состояние, когда положение транспортного средства 1 является заданным контрольным статическим положением. Нижняя стадия указывает состояние, когда транспортное средство 1 поворачивается в поперечном направлении из контрольного статического положения.
Когда транспортное средство 1 находится в контрольном статическом положении, цель с одного бока от транспортного средства 1 на расстоянии L1 обнаруживается в направлении вниз на угол θ от горизонтального направления кузова транспортного средства.
Когда транспортное средство 1 поворачивается в поперечном направлении (т.е., когда транспортное средство 1 смещается в поперечном направлении), цель на расстоянии L2 от транспортного средства 1 обнаруживается в направлении вниз на тот же угол θ от горизонтального направления кузова транспортного средства. Другими словами, поворот транспортного средства 1 в поперечном направлении вызывает ошибочное обнаружение относительного расстояния до цели на расстоянии L2 от транспортного средства как расстояния L1. Это вызывает погрешность измерения (L1 - L2).
[0026] Что касается интервала смещения в поперечном направлении, смещение в поперечном направлении изменяется вследствие воздействия наклона или т.п., так что положение цели, такой как белая линия или бордюрный камень, существующий с одной стороны от транспортного средства 1, может быть ошибочно вычислено. Например, когда изменение положения около одного градуса возникает в поперечном направлении на дороге с наклоном около 2%, расстояние до белой линии с одного бока на расстоянии 5 м ошибочно вычисляется как более короткое приблизительно на 30 см. Когда собственное положение оценивается на основании таких данных о положении цели, собственное положение ошибочно вычисляется как смещенная поперечно на 30 см, так что транспортное средство 1 может наезжать на бордюрный камень или т.п.
[0027] Вследствие этого, блок 25 выбора обращается к интервалу смещения в поперечном направлении, добавленному к данным о положении цели и сохраненному в качестве величины изменения поведения в запоминающем устройстве 24, и выбирает, в качестве выбранных данных о положении цели, данные о положении цели, в которых интервал смещения в поперечном направлении меньше заданного порогового значения. Другими словами, блок 25 выбора выбирает, в качестве выбранных данных о положении цели, данные о положении цели для относительного положения, обнаруженного в течение периода, в котором интервал смещения в поперечном направлении меньше заданного порогового значения.
Отметим, что смещение в поперечном направлении возникает во время поворота транспортного средства 1. Соответственно, блок 25 выбора может выбирать, в качестве выбранных данных о положении цели, данные о положении цели, в которых скорость рыскания или поперечное ускорение G, сохраненные в качестве величины изменения поведения в запоминающем устройстве 24, меньше заданного порогового значения.
[0028] Таким образом, блок 25 выбора выбирает, в качестве выбранных данных о положении цели, данные о положении цели для относительного положения, обнаруженного в течение периода, в котором величина изменения поведения меньше порогового значения, среди данных о положении цели, накопленных в запоминающем устройстве 24.
Посредством выбора данных о положении цели с величиной изменения поведения менее заданного порогового значения, данные о положении цели с небольшой погрешностью вследствие изменения поведения транспортного средства 1 выбираются в качестве выбранных данных о положении цели для использования в оценке собственного положения транспортного средства 1. Другими словами, не выбирая данные о положении цели с величиной изменения поведения, равной или более заданному пороговому значению, данные о положении цели с большой погрешностью вследствие изменения поведения транспортного средства 1 исключаются из выбранных данных о положении цели для использования в оценке собственного положения транспортного средства 1. Отметим, что не нужно выбирать, в качестве данных о положении цели, все части данных о положении цели для относительного положения, обнаруженного в течение периода, в котором величина изменения поведения меньше порогового значения, и могут быть выбраны только данные о положении цели, необходимые для обеспечения возможности оценки собственного положения транспортного средства 1 посредством сопоставления с картографической информацией, полученной посредством блока 27 получения картографической информации.
[0029] Обратимся к фиг. 5. Круглые точки схематично иллюстрируют положения цели, указанные посредством данных о положении цели, а треугольные точки схематично иллюстрируют положения цели на карте, указанные посредством картографической информации.
Посредством выбора данных о положении цели с величиной изменения поведения менее заданного порогового значения могут быть выбраны данные о положении цели с небольшой погрешностью вследствие изменения поведения транспортного средства 1 и положительно совпадающие с положениями на карте, а данные с большой погрешностью вследствие изменения поведения и едва ли совпадающие с положениями на карте, могут быть исключены.
[0030] Обратимся к фиг. 2. Блок 26 оценки положения сопоставляет выбранные данные о положении цели с картографической информацией, полученной посредством блока 27 получения картографической информации, для оценки собственного положения транспортного средства 1.
Блок 27 получения картографической информации получает картографические данные и картографическую информацию, указывающую положение на карте для цели, находящейся в картографических данных. Например, блок 27 получения картографической информации является автомобильной навигационной системой, картографической базой данных или т.п. Отметим, что блок 27 получения картографической информации может получать картографическую информацию извне через систему связи, такую как система беспроводной связи (связь между инфраструктурой и транспортным средством или связь между транспортными средствами также является возможной). В этом случае блок 27 получения картографической информации может периодически получать самую последнюю картографическую информацию для обновления имеющейся картографической информации. Кроме того, блок 27 получения картографической информации может накапливать в качестве картографической информации информацию о положении цели, обнаруженной на дороге для движения, где фактически движется транспортное средство 1.
[0031] Блок 26 оценки положения может оценивать собственное положение транспортного средства 1, сопоставляя выбранные данные о положении цели с картографической информацией, например, посредством обработки сопоставления данных, как описано ниже.
Обратимся к фиг. 6. Условное обозначение Si обозначает выбранные данные о положении цели. Индекс i является целым числом от 1 до N, а N является числом частей выбранных данных о положении цели.
Блок 26 оценки положения определяет ориентировочное положение транспортного средства 1 посредством корректировки собственного положения, оцененного в предыдущем цикле обработки, на интервал ΔP перемещения.
[0032] Блок 26 оценки положения предполагает, что положение на карте для транспортного средства 1 является ориентировочным положением, и преобразует относительное положение цели, указанное посредством выбранных данных Si о положении цели, в абсолютное положение на карте. Блок 26 оценки положения выбирает информацию Mi о положении для цели в картографической информации, самую близкую к абсолютному положению из выбранных данных Si о положении цели. В примере на фиг. 6 информация Mx о положении является ближайшей к выбранным данным S1 о положении цели, информация My о положении является ближайшей к выбранным данным S2 о положении цели, а информация Mz о положении является ближайшей к выбранным данным S3 о положении цели.
Блок 26 оценки положения вычисляет расстояние Dij между выбранными данными Si о положении цели и информацией Mi о положении, ближайшей к данным, и вычисляет среднее S расстояния Dij с помощью следующей формулы (1):
[0033] 
[0034] Блок 26 оценки положения вычисляет положение и местоположение транспортного средства 1, имеющего минимальное среднее S, посредством числового анализа и определяет их в качестве оценочных значений для собственного положения транспортного средства 1. Блок 26 оценки положения выводит оценочные значения для собственного положения в систему 3 помощи в управлении.
[0035] (Работа)
Далее будет приведено описание работы устройства 2 оценки собственного положения согласно первому варианту осуществления. Обратимся к фиг. 7.
На этапе S1 устройство 10 формирования изображения, устройство 11 измерения расстояния и блок 20 обнаружения положения цели обнаруживают относительное положение цели, находящейся около транспортного средства 1, относительно транспортного средства 1. Блок 20 обнаружения положения цели выводит сигнал относительного положения, указывающий обнаруженное относительное положение, в блок 23 накопления целевого положения.
На этапе S2 блок 21 оценки интервала перемещения оценивает интервал ΔP перемещения транспортного средства 1 до настоящего момента с момента времени, когда собственное положение транспортного средства 1 оценивается в предыдущем цикле обработки.
[0036] На этапе S3 гиродатчик 14, датчик 15 ускорения и блок 22 определения поведения обнаруживают величину изменения поведения транспортного средства 1.
На этапе S4 блок 23 накопления положения цели накапливает относительное положение цели около транспортного средства 1, указанное посредством сигнала относительного положения, в запоминающем устройстве 24. Кроме того, блок 23 накопления положения цели корректирует относительное положение цели, накопленное в прошлом, в относительное положение относительно текущего положения транспортного средства 1 с помощью истекшего времени до настоящего момента и интервала ΔP перемещения, указанного посредством сигнала интервала перемещения, и накапливает в качестве данных о положении цели в запоминающем устройстве 24. В этом случае, блок 22 определения поведения добавляет величину изменения поведения, обнаруженную во время обнаружения относительного положения для данных о положении цели, в данные о положении цели и сохраняет в запоминающем устройстве 24.
[0037] На этапе S5 блок 25 выбора выбирает, в качестве выбранных данных о положении цели, данные о положении цели для относительного положения, обнаруженного в течение периода, в котором величина изменения поведения меньше порогового значения, среди данных о положении цели, накопленных в запоминающем устройстве 24.
На этапе S6 блок 26 оценки положения сопоставляет выбранные данные о положении цели с картографической информацией для оценки собственного положения транспортного средства 1.
На этапе S7 система 3 помощи в управлении использует собственное положение транспортного средства 1, оцененную посредством блока 26 оценки положения для осуществления помощи в управлении при управлении водителем транспортным средством 1.
[0038] (Результаты первого варианта осуществления)
(1) Устройство 10 формирования изображения и устройство 11 измерения расстояния, которые служат в качестве датчика обнаружения цели и блока 20 обнаружения положения цели, обнаруживают относительное положение цели, находящейся около транспортного средства 1, относительно транспортного средства 1. Блок 21 оценки интервала перемещения оценивает интервал перемещения транспортного средства 1. Блок 23 накопления положения цели корректирует относительное положение на основании интервала перемещения транспортного средства 1 и накапливает ее в качестве данных о положении цели. Гиродатчик 14 и датчик 15 ускорения, которые служат в качестве датчика поведения, и блок 22 обнаружения поведения обнаруживают величину изменения поведения транспортного средства 1. Блок 25 выбора выбирает данные о положении цели для относительного положения, обнаруженного в течение периода, в котором величина изменения поведения меньше порогового значения, среди накопленных данных о положении цели. Блок 26 оценки положения сопоставляет выбранные данные о положении цели с картографической информацией, указывающей положение на карте для цели, для оценки текущего положения транспортного средства 1.
[0039] Поскольку данные о положении цели для относительного положения, обнаруженного в течение периода, в котором величина изменения поведения меньше порогового значения, выбираются и используются для оценки положения транспортного средства 1, данные о положении цели с большой погрешностью могут быть исключены из оценки положения, даже когда погрешность возникает в данных о положении цели вследствие изменения положения, вызванного изменением поведения движущегося тела. Это может предотвращать снижение точности оценки положения для транспортного средства 1, вызванное погрешностью, возникающей в данных о положении цели вследствие изменения поведения движущегося объекта.
[0040] (2) Блок 25 выбора выбирает данные о положении цели для цели около (вблизи) текущего положения транспортного средства 1, и блок 26 оценки положения сопоставляет выбранные данные о положении цели с картографической информацией. Данные о положении цели для цели около текущего положения транспортного средства 1, имеют небольшое накопление погрешностей вследствие корректировки с помощью интервала ΔP перемещения, и, следовательно, склонны иметь высокую точность положения. Посредством выбора данных о положении цели для цели около текущего положения транспортного средства 1 и использования данных для оценки положения транспортного средства 1, точность в оценке положения для транспортного средства 1 может быть улучшена.
[0041] (3) Величина изменения поведения может включать в себя величину поворота транспортного средства 1 в продольном направлении. Другими словами, блок 25 выбора может выбирать, в качестве данных о положении цели, которые должны быть использованы для оценки положения, данные о положении цели для относительного положения, обнаруженного в течение периода, в котором величина поворота транспортного средства 1 в продольном направлении меньше порогового значения. Это может предотвращать снижение точности оценки положения для транспортного средства 1, вызванное погрешностью, возникающей в данных о положении цели вследствие поворота транспортного средства 1 в продольном направлении.
[0042] (4) Величина изменения поведения может включать в себя величину поворота транспортного средства 1 в поперечном направлении. Другими словами, блок 25 выбора может выбирать, в качестве данных о положении цели, которые должны быть использованы для оценки положения, данные о положении цели для относительного положения, обнаруженного в течение периода, в котором величина поворота транспортного средства 1 в поперечном направлении меньше порогового значения. Это может предотвращать снижение точности оценки положения для транспортного средства 1, вызванное погрешностью, возникающей в данных о положении цели вследствие поворота транспортного средства 1 в поперечном направлении.
[0043] (5) Величина изменения поведения может включать в себя ускорение/замедление транспортного средства 1. Другими словами, блок 25 выбора может выбирать, в качестве данных о положении цели, которые должны быть использованы для оценки положения, данные о положении цели для относительного положения, обнаруженного в течение периода, в котором ускорение/замедление транспортного средства 1 меньше порогового значения. Ускорение/замедление транспортного средства 1 может быть либо ускорением/замедлением в продольном направлении, либо поперечным ускорением G.
Поворот транспортного средства 1 в продольном направлении возникает вследствие ускорения/замедления в продольном направлении, а его поворот в поперечном направлении возникает вследствие ускорения/замедления в направлении ширины.
С помощью данных о положении цели для относительного положения, обнаруженного в течение периода, в котором ускорение/замедление транспортного средства 1 меньше порогового значения, может предотвращаться снижение точности оценки положения для транспортного средства 1, которое вызвано погрешностью, возникающей в данных о положении цели вследствие поворота в продольном направлении или поперечном направлении посредством ускорения/замедления.
[0044] (Модификации)
(1) Блок 25 выбора может исключать данные о положении цели для относительного положения, обнаруженного в течение периода, в котором величина изменения поведения равна или больше порогового значения, из запоминающего устройства 24. Другими словами, блок 25 выбора может выбирать данные о положении цели для относительного положения, обнаруженного в течение периода, в котором величина изменения поведения меньше порогового значения, и может оставлять данные в запоминающем устройстве 24. Блок 26 оценки положения сопоставляет данные о положении цели, оставшиеся в запоминающем устройстве 24, с картографической информацией, указывающей положение на карте для цели, для оценки текущего положения транспортного средства 1.
Область хранения запоминающего устройства 24 может быть эффективно использована посредством удаления данных о положении цели для относительного положения, обнаруженного в течение периода, в котором величина изменения поведения равна или больше порогового значения, из запоминающего устройства 24.
[0045] (2) Когда изменение поведения транспортного средства 1 является временным изменением и не влияет на точность оценки собственного положения, блок 25 выбора не должен исключать даже данные о положении цели в периоде с величиной изменения поведения, равной или больше порогового значения, из выбранных данных о положении цели.
Например, когда период с величиной изменения поведения, равной или больше порогового значения, не продолжается в течение заданного интервала времени или более, блок 25 выбора выбирает, в качестве выбранных данных о положении цели, даже данные о положении цели для относительного положения, обнаруженного в течение периода с величиной изменения поведения, равной или больше порогового значения, в дополнение к периоду с величиной изменения поведения меньше порогового значения.
С другой стороны, когда период с величиной изменения поведения, равной или больше порогового значения, продолжается в течение заданного интервала времени или более, блок 25 выбора выбирает, в качестве выбранных данных о положении цели, данные о положении цели для относительного положения, обнаруженного в течение периода с величиной изменения поведения меньше порогового значения (т.е., периода, отличного от периода с величиной изменения поведения, равной или больше порогового значения).
Например, когда величина изменения поведения, равная или больше порогового значения, непрерывно обнаруживается заданное число раз, блок 25 выбора может определять, что период с величиной изменения поведения, равной или больше порогового значения, продолжается в течение заданного интервала времени или более.
[0046] Кроме того, когда величина изменения поведения, равная или больше порогового значения, продолжается, и затем период с величиной изменения поведения меньше порогового значения не продолжается в течение заданного интервала времени или более, блок 25 выбора исключает из выбранных данных о положении цели данные о положении цели для относительного положения, обнаруженного в течение периода, в котором состояние с величиной изменения поведения меньше порогового значения не продолжается в течение заданного интервала времени или более.
Например, блок 25 выбора исключает, из выбранных данных о положении цели, данные о положении цели для относительного положения, обнаруженного в течение периода с момента времени начала периода, в котором величина изменения поведения, равная или больше порогового значения, непрерывно обнаруживалась заданное число раз, до момента времени начала периода, в котором величина изменения поведения меньше порогового значения непрерывно обнаруживалась заданное число раз.
Таким образом, когда период с величиной изменения поведения, равной или больше порогового значения продолжается в течение заданного интервала времени или более, блок 25 выбора выбирает данные о положении цели для относительного положения, обнаруженного в течение периода, отличного от этого периода, так что данные о целевом положении для периода, в котором произошло изменение поведения, влияющее на точность оценки собственного положения, могут быть соответствующим образом исключены.
[0047] (Второй вариант осуществления)
Далее будет приведено описание устройства 2 оценки собственного положения согласно второму варианту осуществления.
Когда транспортное средство 1 повторяет ускорение/замедление на низкой скорости вследствие затора или т.п., или когда транспортное средство 1 поворачивает на перекрестке или т.п., точность импульсов скорости колеса ухудшается, тем самым, снижая точность измерения интервала ΔP перемещения транспортного средства 1 в направлении движения. Когда такой интервал ΔP перемещения используется для корректировки данных о положении цели, накопленных в запоминающем устройстве 24, погрешности накапливаются в данных о положении цели. То же самое также применяется к случаю, когда большая скорость рыскания или поперечное ускорение G возникают в транспортном средстве 1.
[0048] Вследствие этого, когда величина изменения поведения, равная или больше порогового значения, возникает, блок 25 выбора исключает данные о положении цели для относительного положения, обнаруженного перед этим, из выбранных данных о положении цели и выбирает, в качестве выбранных данных о положении цели, данные о положении цели для относительного положения, обнаруженного после того, как величина изменения поведения стала меньше порогового значения. Другими словами, блок 25 выбора выбирает, в качестве выбранных данных о положении цели, данные о положении цели для относительного положения, обнаруженного в течение периода, в котором состояние с величиной изменения поведения меньше порогового значения продолжается до текущего момента. Отметим, что не нужно выбирать, в качестве выбранных данных о положении цели, все части данных о положении цели для относительного положения, обнаруженного в течение периода, в котором состояние с величиной изменения поведения меньше порогового значения продолжается до текущего момента. Могут быть выбраны только данные о положении цели, необходимые для обеспечения возможности оценки собственного положения транспортного средства 1 посредством сопоставления с картографической информацией, полученной посредством блока 27 получения картографической информации.
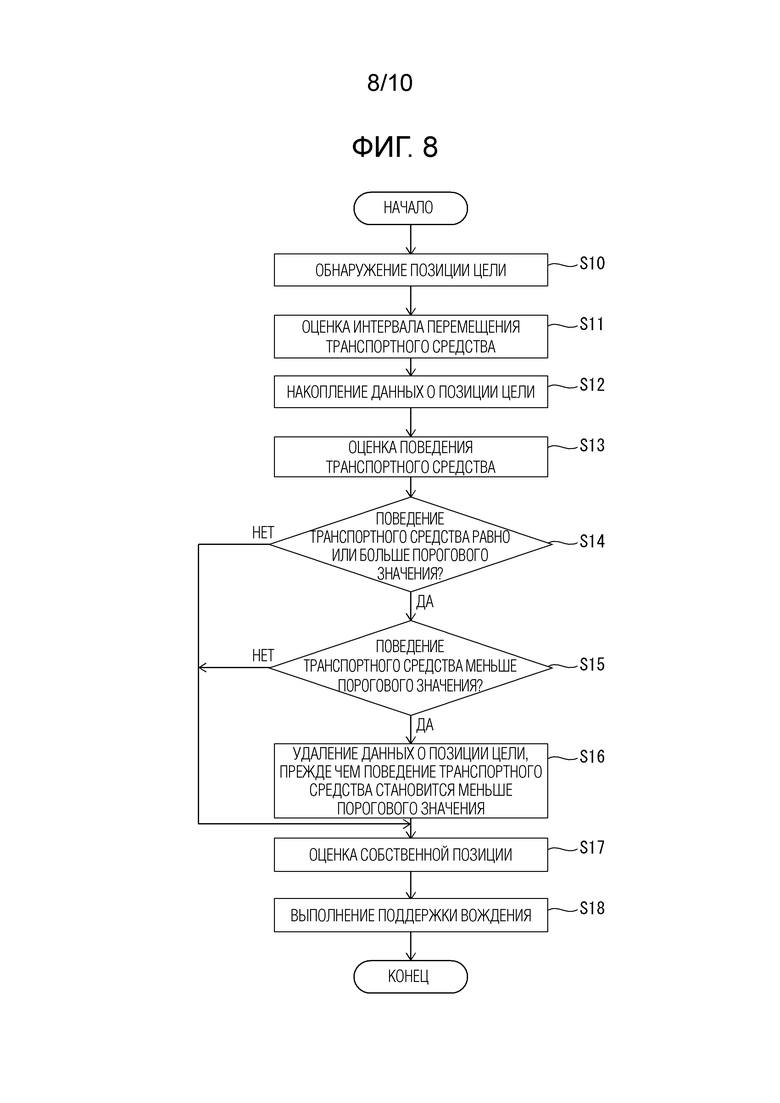
[0049] Обратимся к фиг. 8.
Части обработки этапов S10 и S11 являются такими же, что и части этапов S1 и S2 на фиг. 7.
На этапе S12 блок 23 накопления положения цели накапливает относительное положение цели около транспортного средства 1, указанное посредством сигнала относительного положения, в запоминающем устройстве 24. Кроме того, блок 23 накопления положения цели корректирует относительное положение цели, накопленное в прошлом, в относительное положение относительно текущего положения транспортного средства 1 с помощью истекшего времени до настоящего момента и интервала ΔP перемещения, указанного посредством сигнала интервала перемещения, и накапливает их в качестве данных о положении цели в запоминающем устройстве 24.
Обработка этапа S13 является такой же, что и обработка этапа S3 на фиг. 7.
[0050] На этапе S14 блок 25 выбора определяет, является или нет величина изменения поведения равной или больше порогового значения. Когда величина изменения поведения равна или больше порогового значения (этап S14: Y), обработка переходит к этапу S15. Когда величина изменения поведения не равна или больше порогового значения (этап S14: N), обработка переходит к этапу S17.
На этапе S15 блок 25 выбора определяет, является или нет изменение поведения меньше порогового значения. Когда величина изменения поведения меньше порогового значения (этап S15: Y), обработка переходит к этапу S16. Когда величина изменения поведения не меньше порогового значения (этап S15: N), обработка переходит к этапу S17.
[0051] На этапе S16 блок 25 выбора удаляет, из запоминающего устройства 24, данные о положении цели для относительного положения, обнаруженного прежде, чем величина изменения поведения становится меньше порогового значения. Другими словами, блок 25 выбора выбирает данные о положении цели для относительного положения, обнаруженного в течение периода, в котором состояние с величиной изменения поведения меньше порогового значения продолжается до текущего момента, и оставляет их в запоминающем устройстве 24.
На этапе S17 блок 26 оценки положения сопоставляет данные о положении цели, оставшиеся в запоминающем устройстве 24, с картографической информацией для оценки текущего положения транспортного средства 1.
Обработка этапа S18 является такой же, что и обработка этапа S7 на фиг. 7.
[0052] (Результаты второго варианта осуществления)
(1) Блок 25 выбора выбирает, в качестве выбранных данных о положении цели, данные о положении цели для относительного положения, обнаруженного в течение периода, в котором состояние с величиной изменения поведения меньше порогового значения продолжается до текущего момента. Блок 26 оценки положения сопоставляет выбранные данные о положении цели, оставшиеся в запоминающем устройстве 24, с картографической информацией, указывающей положение на карте для цели, для оценки текущего положения транспортного средства 1. Таким образом, данные о положении цели с пониженной точностью вследствие корректировки на интервал ΔP перемещения, включающей в себя погрешность, вызванную изменением поведения транспортного средства 1, могут быть исключены из выбранных данных о положении цели. В результате может предотвращаться снижение точности оценки собственного положения, даже когда погрешность измерения интервала ΔP перемещения возникает вследствие изменения поведения.
[0053] (2) Величина изменения поведения может включать в себя ускорение/замедление транспортного средства 1. Другими словами, блок 25 выбора может выбирать, в качестве выбранных данных о положении цели, данные о положении цели для относительного положения, обнаруженного в течение периода, в котором состояние с ускорением/замедлением транспортного средства 1 меньше порогового значения продолжается до текущего момента. Ускорение/замедление транспортного средства 1 может быть ускорением/замедлением в продольном направлении, поперечном направлении G или скоростью рыскания.
Таким образом может предотвращаться снижение точности оценки собственного положения, даже когда погрешность измерения интервала ΔP перемещения возникает вследствие ускорения/замедления, возникающего в транспортном средстве 1.
[0054] (Третий вариант осуществления)
Далее будет приведено описание устройства 2 оценки собственного положения согласно третьему варианту осуществления.
Посредством выполнения оценки собственного положения с помощью данных о положении цели для относительного положения, обнаруженного в течение периода, в котором сохраняется состояние с величиной изменения поведения меньше порогового значения, может быть исключена погрешность измерения, возникающая в относительном положении относительно цели или интервале ΔP перемещения, , что обеспечивает возможность оценки собственного положения транспортного средства 1.
Соответственно, когда величина изменения поведения равна или больше порогового значения в некотором первом периоде, собственное положение транспортного средства 1 может быть обнаружена с высокой точностью, во время каждого из второго периода перед первым периодом, в котором величина изменения поведения меньше порогового значения, и третьего периода после первого периода, в котором величина изменения поведения становится меньше порогового значения. Таким образом, относительное положение между собственным положением транспортного средства 1, оцененным в течение второго периода, и собственным положением транспортного средства 1, оцененным в течение третьего периода, может быть вычислено с высокой точностью.
[0055] Соответственно, даже когда данные о положении цели для относительного положения, обнаруженного в течение второго периода, корректируются на интервал ΔP перемещения, включающий в себя погрешность во время первого периода с величиной изменения поведения, равной или больше порогового значения, и, таким образом, точность снижается, корректировка может быть выполнена с помощью относительного положения между собственным положением, оцененной во время второго периода, и относительным положением, оцененным во время третьего периода.
Схема 16 оценки собственного положения третьего варианта осуществления корректирует данные о положении цели для относительного положения, обнаруженного во время второго периода, с помощью относительного положения между собственным положением, оцененным во время второго периода, и собственным положением, оцененным во время третьего периода.
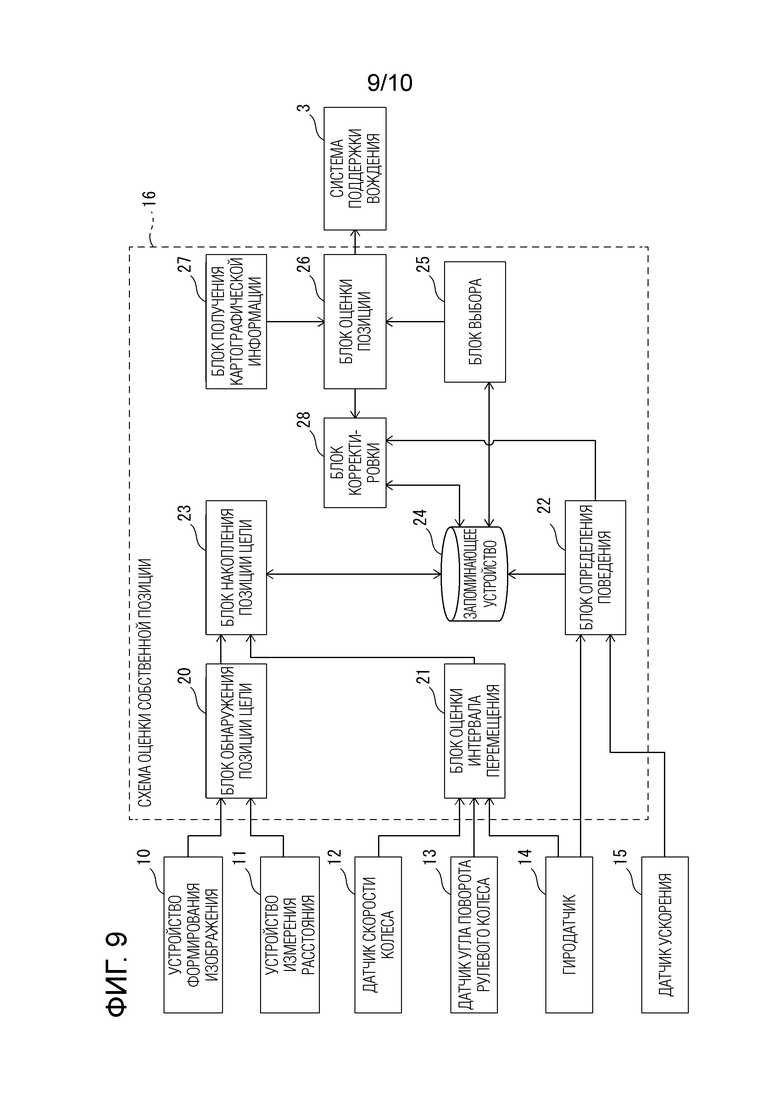
[0056] Обратимся к фиг. 9. Схема 16 оценки собственного положения включает в себя блок 28 корректировки. Процессор, включенный в схему 16 оценки собственного положения, выполняет компьютерную программу, сохраненную в запоминающем устройстве 24, для выполнения функции блока 28 корректировки.
Во втором периоде с величиной изменения поведения меньше порогового значения перед первым периодом блок 26 оценки положения сопоставляет данные о положении цели для относительного положения, обнаруженного в течение второго периода, с картографической информацией для оценки первого положения транспортного средства 1 перед первым периодом. Блок 26 оценки положения выводит первое положение в систему 3 помощи в управлении и блок 28 корректировки.
Блок 28 корректировки добавляет информацию о первом положении транспортного средства 1, оцененном во втором периоде, в данные о положении цели для относительного положения, обнаруженного в течение второго периода, и сохраняет в запоминающем устройстве 24.
[0057] В третьем периоде с величиной изменения поведения меньше порогового значения после первого периода блок 26 оценки положения сопоставляет данные о положении цели для относительного положения, обнаруженного в течение третьего периода, с картографической информацией для оценки второго положения транспортного средства 1 после первого периода. Блок 26 оценки положения выводит второе положение в блок 28 корректировки.
Блок 28 корректировки корректирует данные о положении цели для относительного положения, обнаруженного в течение второго периода, на основании относительного положения между первым положением и вторым положением.
[0058] После того, как данные о положении цели для относительного положения, обнаруженного в течение второго периода, были скорректированы, блок 26 оценки положения сопоставляет скорректированные данные о положении цели и данные о положении цели для относительного положения, обнаруженного в течение третьего периода, с картографической информацией для оценки второго положения транспортного средства 1 после первого периода. Отметим, что в отношении скорректированных данных о положении цели и данных о положении цели для относительного положения, обнаруженного в течение третьего периода, не нужно сопоставлять все части данных о положении цели с картографической информацией, и только данные о положении цели, необходимые для обеспечения возможности оценки собственного положения транспортного средства 1, могут быть сопоставлены с картографической информацией.
Блок 26 оценки положения выводит второе положение, оцененное после корректировки данных о положении цели, в систему 3 помощи в управлении. Блок 26 оценки положения добавляет информацию о втором положении, оцененном после корректировки данных о положении цели, в данные о положении цели для относительного положения, обнаруженного в течение третьего периода, и сохраняет в запоминающем устройстве 24.
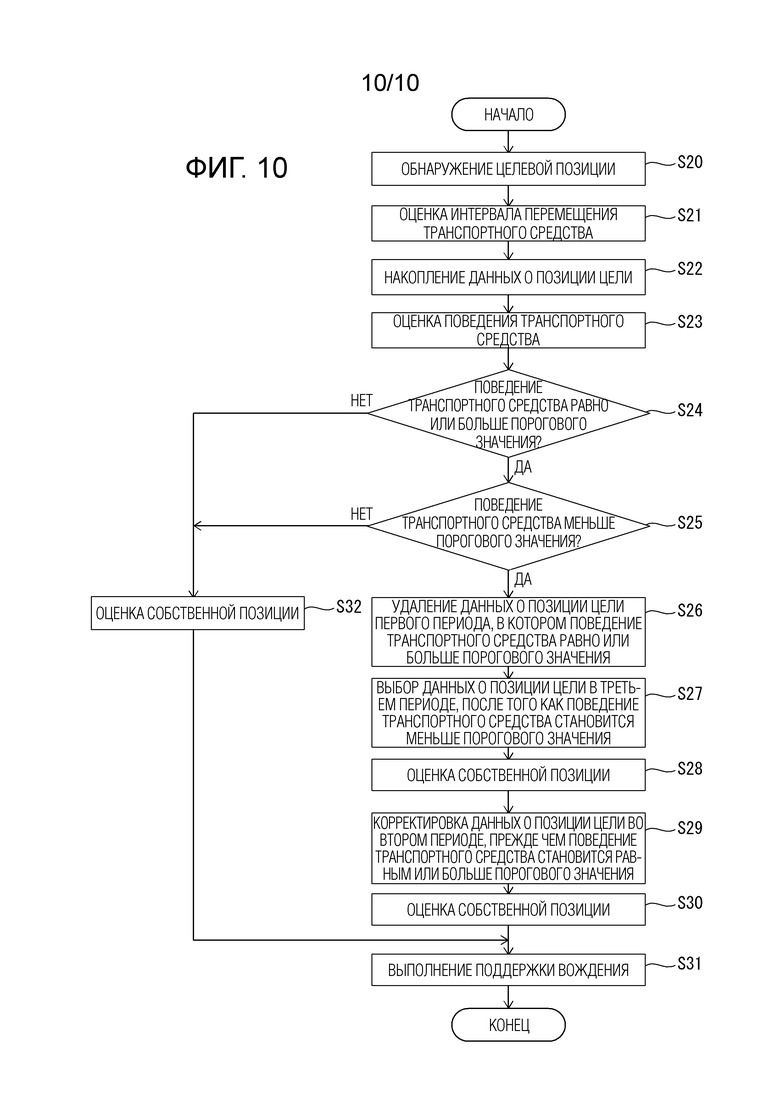
[0059] Обратимся к фиг. 10. Части обработки этапов S20-S23 являются такими же, что и части этапов S10-S13 на фиг. 8.
На этапе S24 блок 25 выбора определяет, является или нет величина изменения поведения равной или больше порогового значения. Когда величина изменения поведения равна или больше порогового значения (этап S24: Y), обработка переходит к этапу S25. Когда величина изменения поведения не равна или больше порогового значения (этап S24: N), обработка переходит к этапу S32.
На этапе S25 блок 25 выбора определяет, является или нет величина изменения поведения меньше порогового значения. Когда величина изменения поведения меньше порогового значения (этап S25: Y), обработка переходит к этапу S26. Когда величина изменения поведения не меньше порогового значения (этап S25: N), обработка переходит к этапу S32.
[0060] На этапе S26 блок 25 выбора удаляет, из запоминающего устройства 24, данные о положении цели для относительного положения, обнаруженного в течение первого периода с величиной изменения поведения, равной или больше порогового значения.
На этапе S27 блок 25 выбора выбирает данные о положении цели для относительного положения, обнаруженного в течение третьего периода с величиной изменения поведения меньше порогового значения после первого периода.
На этапе S28 блок 26 оценки положения сопоставляет данные о положении цели, выбранные на этапе S27, с картографической информацией для оценки второго положения транспортного средства 1.
[0061] На этапе S29 блок 28 корректировки считывает из запоминающего устройства 24 информацию о первом положении транспортного средства 1, оцененном во втором периоде, которая была сохранена в дополнение к данным о положении цели второго периода с величиной изменения поведения меньше порогового значения перед первым периодом. Блок 28 корректировки корректирует данные о положении цели для относительного положения, обнаруженного в течение второго периода, на основании относительного положения между первым положением и вторым положением.
На этапе S30 блок 26 оценки положения сопоставляет данные о положении цели, оставшиеся в запоминающем устройстве 24 (т.е. данные о положении цели, скорректированные на этапе S29, и данные о положении цели для относительного положения, обнаруженного в течение третьего периода), с картографической информацией, чтобы оценивать второе положение после первого периода. Блок 28 корректировки добавляет информацию о втором положении транспортного средства 1, оцененном на этапе S30, в данные о положении цели для относительного положения, обнаруженного в течение третьего периода, и сохраняет в запоминающем устройстве 24.
Обработка этапа S31 является такой же, что и обработка этапа S18 на фиг. 8.
Обработка этапа S32 является такой же, что и обработка этапа S17 на фиг. 8. После этапа S32 обработка переходит к этапу S31.
[0062] (Действия третьего варианта осуществления)
Блок 26 оценки положения сопоставляет данные о положении цели для относительного положения, обнаруженного в течение второго периода, в котором величина изменения поведения меньше порогового значения, перед первым периодом, в котором величина изменения поведения равна или больше порогового значения, с картографической информацией для оценки первого положения транспортного средства 1 перед первым периодом. Кроме того, блок 26 оценки положения сопоставляет данные о положении цели для относительного положения, обнаруженного в течение третьего периода, в котором величина изменения поведения меньше порогового значения, после первого периода, с картографической информацией для оценки второго положения транспортного средства 1 после первого периода. Блок 28 корректировки корректирует данные о положении цели для относительного положения, обнаруженного в течение второго периода, на основании относительного положения между первым положением и вторым положением. Блок 26 оценки положения сопоставляет скорректированные данные о положении цели и данные о положении цели для относительного положения, обнаруженного в течение третьего периода, с картографической информацией для оценки собственного положения транспортного средства 1.
Таким образом, данные о положении цели для относительного положения, обнаруженного перед первым периодом с величиной изменения поведения, равной или больше порогового значения, могут быть использованы снова, таким образом позволяя повысить точность оценки собственного положения.
[0063] Все примеры и условные формулировки, приведенные в данном документе, служат в педагогических целях для помощи читателю в понимании изобретения и идей, определяющих вклад автора изобретения в развитие данной области техники, и не должны истолковываться в качестве ограничений на такие конкретно изложенные примеры и условия, кроме того организация таких примеров в описании изобретения не связана с демонстрацией преимуществ и недостатков изобретения. При том, что выше подробно описаны один или более вариантов осуществления настоящего изобретения, следует понимать, что в них могут быть выполнены различные изменения, замены и модификации, не выходящие за рамки сущности и объема изобретения.
Список условных обозначений
[0064] 1: Транспортное средство
2: Устройство оценки собственного положения
3: Система помощи в управлении
10: Устройство формирования изображения
11: Устройство измерения расстояния
12: Датчик скорости колеса
13: Датчик угла поворота руля
14: Гиродатчик
15: Датчик ускорения
16: Схема оценки собственного положения
20: Блок обнаружения положения цели
21: Блок оценки интервала перемещения
22: Блок определения поведения
23: Блок накопления положения цели
24: Запоминающее устройство
25: Блок выбора
26: Блок оценки положения
27: Блок получения картографической информации
28: Блок корректировки
Предложенная группа изобретений относится к средствам для оценки собственного положения подвижного объекта. Предложенный способ оценки собственного положения включает в себя: обнаружение относительного положения цели, находящейся около движущегося тела (1), относительно движущегося тела (S1); оценку интервала перемещения движущегося тела (S2); корректировку относительного положения на основании интервала перемещения движущегося тела и накопление скорректированного относительного положения в качестве данных о положении цели (S4); обнаружение величины изменения поведения движущегося тела (S3); выбор, из накопленных данных о положении цели, данных о положении цели для относительного положения, обнаруженного в течение периода, в котором величина изменения поведения меньше порогового значения (S5); и сопоставление выбранных данных о положении цели с картографической информацией, указывающей положение цели на карте, для оценки текущего положения движущегося тела (S6). Указанный способ реализует устройство, оснащенное соответствующими блоками. Данная группа изобретений позволяет обеспечить требуемую точность оценки положения движущегося тела даже в том случае, когда погрешность возникает в положении по отношению к цели, обнаруженной датчиком, установленным в движущемся теле. 2 н. и 7 з.п. ф-лы, 10 ил.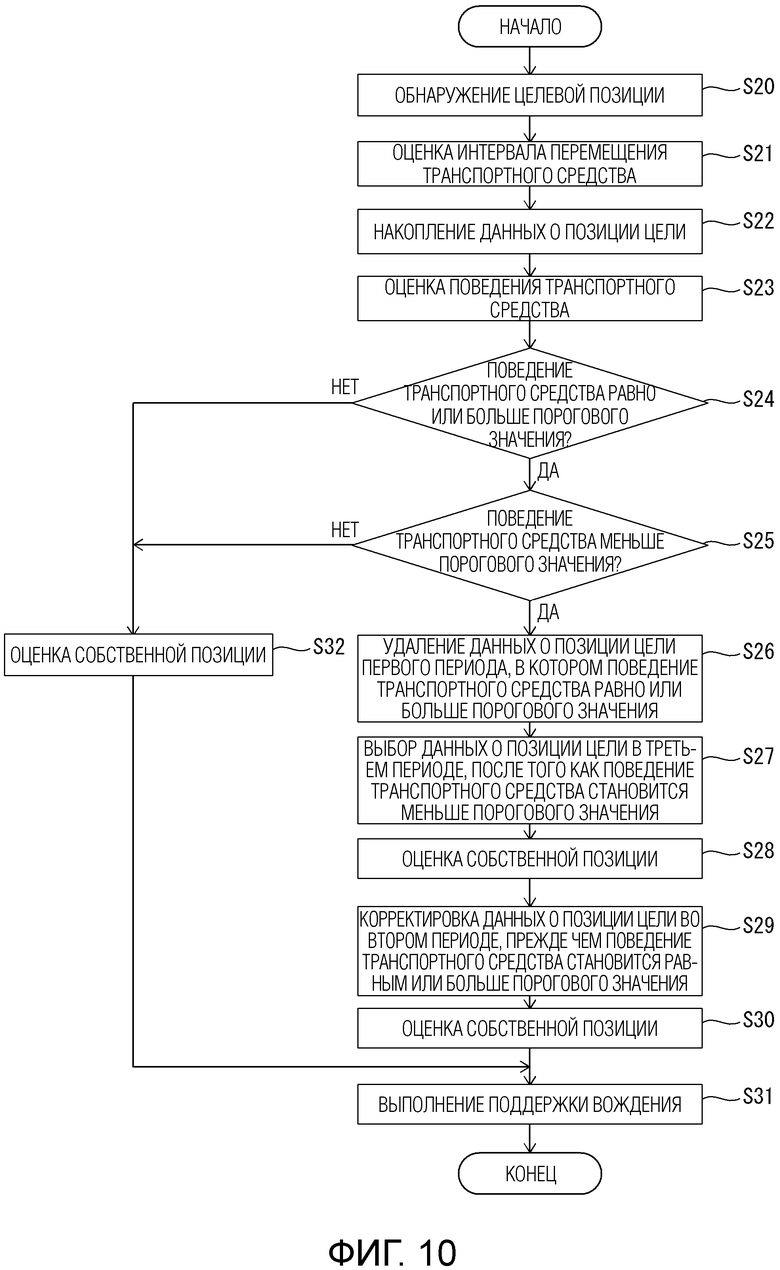
1. Способ оценки собственного положения, содержащий этапы, на которых:
обнаруживают относительное положение цели, находящейся около движущегося тела, относительно движущегося тела;
оценивают интервал перемещения движущегося тела;
корректируют относительное положение на основании интервала перемещения движущегося тела и накапливают скорректированное относительное положение в качестве данных о положении цели;
обнаруживают величину изменения поведения движущегося тела;
выбирают среди накопленных данных о положении цели данные о положении цели для относительного положения, обнаруженного в течение периода, в котором величина изменения поведения меньше порогового значения; и
сопоставляют выбранные данные о положении цели с картографической информацией, указывающей положение цели на карте, для оценки текущего положения движущегося тела.
2. Способ оценки собственного положения по п. 1, в котором, когда период, в котором величина изменения поведения равна или больше порогового значения, продолжается в течение заданного интервала времени или более, данные о положении цели для относительного положения, обнаруженного в течение периода, отличного от периода, в котором величина изменения поведения равна или больше порогового значения, выбираются и сопоставляются с картографической информацией, и
когда период, в котором величина изменения поведения равна или больше порогового значения, не продолжается в течение заданного интервала времени или более, данные о положении цели для относительного положения, обнаруженного в течение периода, в котором величина изменения поведения равна или больше порогового значения, включаются в данные о положении цели, которые должны быть сопоставлены с картографической информацией.
3. Способ оценки собственного положения по п. 1, в котором данные о положении цели для цели около текущего положения движущегося объекта выбираются и сопоставляются с картографической информацией.
4. Способ оценки собственного положения по п. 1, в котором величина изменения поведения включает в себя величину поворота движущегося тела в продольном направлении.
5. Способ оценки собственного положения по п. 1, в котором величина изменения поведения включает в себя величину поворота движущегося тела в поперечном направлении.
6. Способ оценки собственного положения по п. 1, в котором величина изменения поведения включает в себя ускорение/замедление движущегося тела.
7. Способ оценки собственного положения по любому из пп. 1-6, в котором данные о положении цели для относительного положения, обнаруженного в течение периода, в котором состояние с величиной изменения поведения меньше порогового значения продолжается до текущего момента, выбираются и сопоставляются с картографической информацией.
8. Способ оценки собственного положения по любому из пп. 1-6, в котором данные о положении цели для относительного положения, обнаруженного в течение второго периода, в котором величина изменения поведения меньше порогового значения, перед первым периодом, в котором величина изменения поведения равна или больше порогового значения, сопоставляются с картографической информацией для оценки первого положения движущегося тела перед первым периодом; данные о положении цели для относительного положения, обнаруженного в течение третьего периода, в котором величина изменения поведения меньше порогового значения, после первого периода, сопоставляются с картографической информацией для оценки второго положения движущегося тела после первого периода; и на основании относительного положения между первым положением и вторым положением корректируются данные о целевом положении для относительного положения, обнаруженного в течение второго периода.
9. Устройство оценки собственного положения, содержащее:
датчик обнаружения цели, выполненный с возможностью обнаружения относительного положения цели, находящейся около подвижного тела, относительно подвижного тела;
датчик скорости колеса, выполненный с возможностью обнаружения скорости колеса подвижного тела;
датчик поведения, выполненный с возможностью обнаружения величины изменения поведения движущегося тела; и
схему оценки собственного положения, выполненную с возможностью оценки интервала перемещения движущегося тела согласно по меньшей мере результату обнаружения датчика скорости колеса, корректировки относительного положения, обнаруженного посредством датчика обнаружения цели, на основании интервала перемещения, и накопления скорректированного относительного положения в качестве данных о положении цели в запоминающем устройстве, выбора из накопленных данных о положении цели данных о положении цели для относительного положения, обнаруженного в течение периода, в котором величина изменения поведения меньше порогового значения, и сопоставления выбранных данных о положении цели с картографической информацией, указывающей положение цели на карте, для оценки текущего положения движущегося тела.
| JP 2008250906 A, 16.10.2008 | |||
| JP 2002163782 A, 07.06.2002 | |||
| JP 2012103858 A, 31.05.2012 | |||
| JP 2007104171 A, 19.04.2007 | |||
| JP WO2013027313 A1, 05.03.2015. |

