Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу оценки собственного положения и к устройству оценки собственного положения.
Уровень техники
[0002] В уровне техники известна технология, которая включает в себя средство позиционирования, которое позиционирует положение подвижного тела, и сенсорное средство, которое обнаруживает состояние движения подвижного тела и выполняет сопоставление на карте на основании результата позиционирования средством позиционирования и результата обнаружения сенсорным средством для вычисления положения транспортного средства-носителя на карте (см. патентный документ 1).
Список цитируемых источников
Патентные документы
[0003] Патентный документ 1. JP 2007-263844 A
Раскрытие изобретения
Техническая задача
[0004] Тем не менее, при использовании технологий, описанных в патентном документе 1, для оценки положения транспортного средства-носителя на карте при выполнении автоматической парковки в целевом положении парковки с учетом карты может возникать ошибка в результате позиционирования средства позиционирования и в результате обнаружения посредством сенсорным средством в зависимости от условий парковки. Следовательно, может быть трудно точно оценить положение транспортного средства-носителя на карте.
[0005] С учетом вышеуказанной проблемы, изобретение направлено на создание способа оценки собственного положения и устройства оценки собственного положения, позволяющих при выполнении автоматической парковки в целевом положении парковки с учетом сохраненной окружающей обстановки в целевом положении парковки точно оценивать положение транспортного средства-носителя или цели в сохраненной окружающей обстановке.
Решение задачи
[0006] Согласно одному аспекту изобретения, при выполнении автоматической парковки в целевое положение парковки с учетом сохраненной окружающей обстановки в целевом положении парковки представляется сохраненная окружающая обстановка. В таком случае способ оценки собственного положения и устройство оценки собственного положения отличаются тем, что принимается операция задания взаимного расположения между сохраненной окружающей обстановкой и транспортным средством-носителем или целью, и положение транспортного средства-носителя, или положение цели в сохраненной окружающей обстановки задается на основании упомянутой операции.
Преимущества изобретения
[0007] Согласно изобретению, могут быть предусмотрены способ оценки собственного положения и устройство оценки собственного положения, позволяющие при выполнении автоматической парковки в целевом положении парковки со учетом сохраненной окружающей обстановки в целевом положении парковки точно оценивать положение транспортного средства-носителя или цели в сохраненной окружающей обстановке.
Краткое описание чертежей
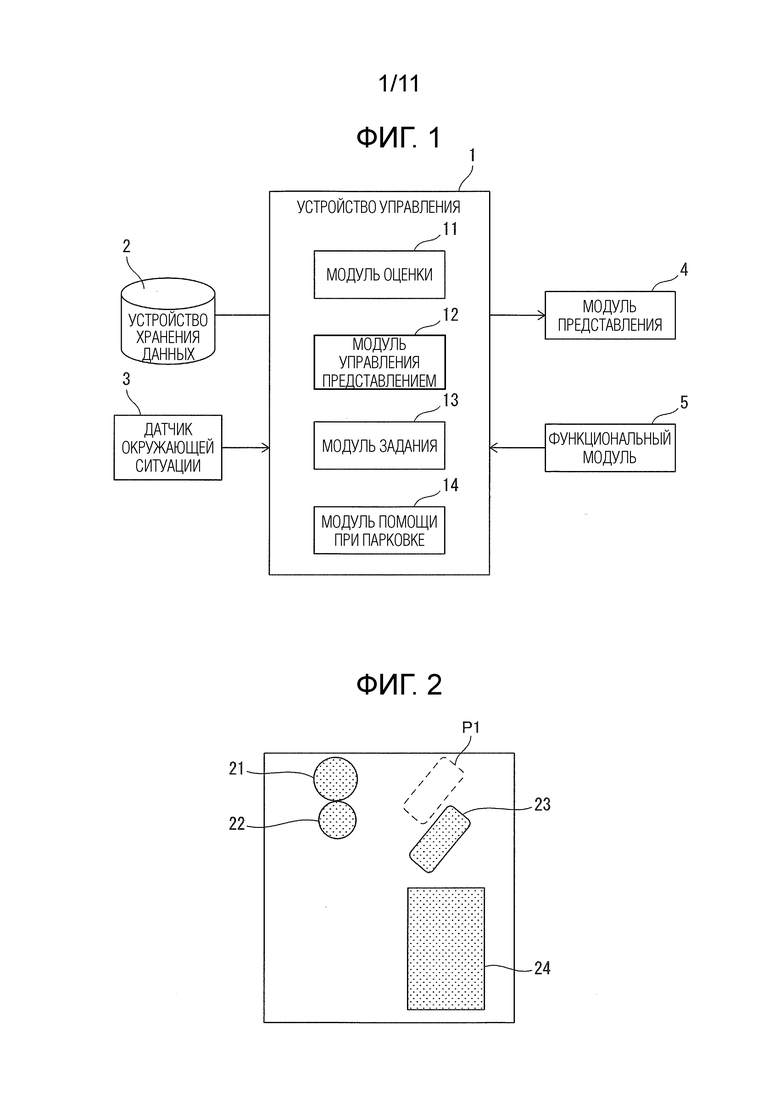
[0008] Фиг. 1 является блок-схемой, иллюстрирующей пример устройства оценки собственного положения согласно варианту осуществления настоящего изобретения;
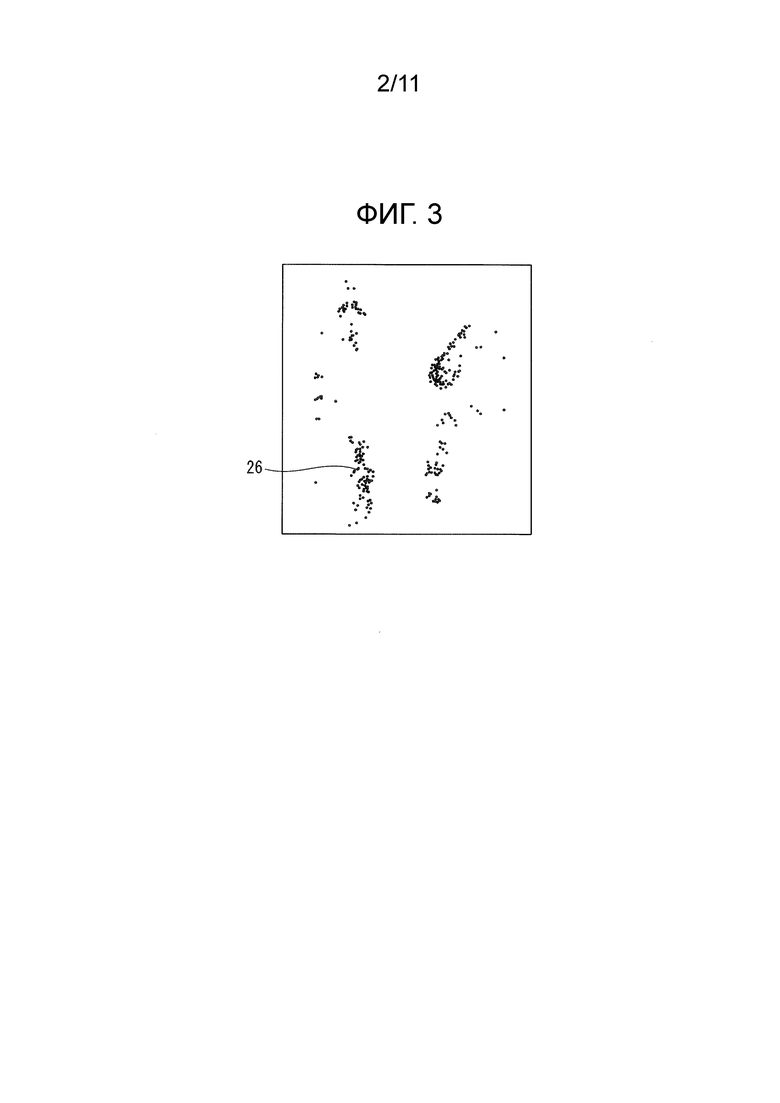
Фиг. 2 является принципиальной схемой, иллюстрирующей пример картографических данных, сохраненных в устройстве хранения данных согласно варианту осуществления настоящего изобретения;
Фиг. 3 является принципиальной схемой, иллюстрирующей пример результата обнаружения датчика окружающей обстановки согласно варианту осуществления настоящего изобретения;
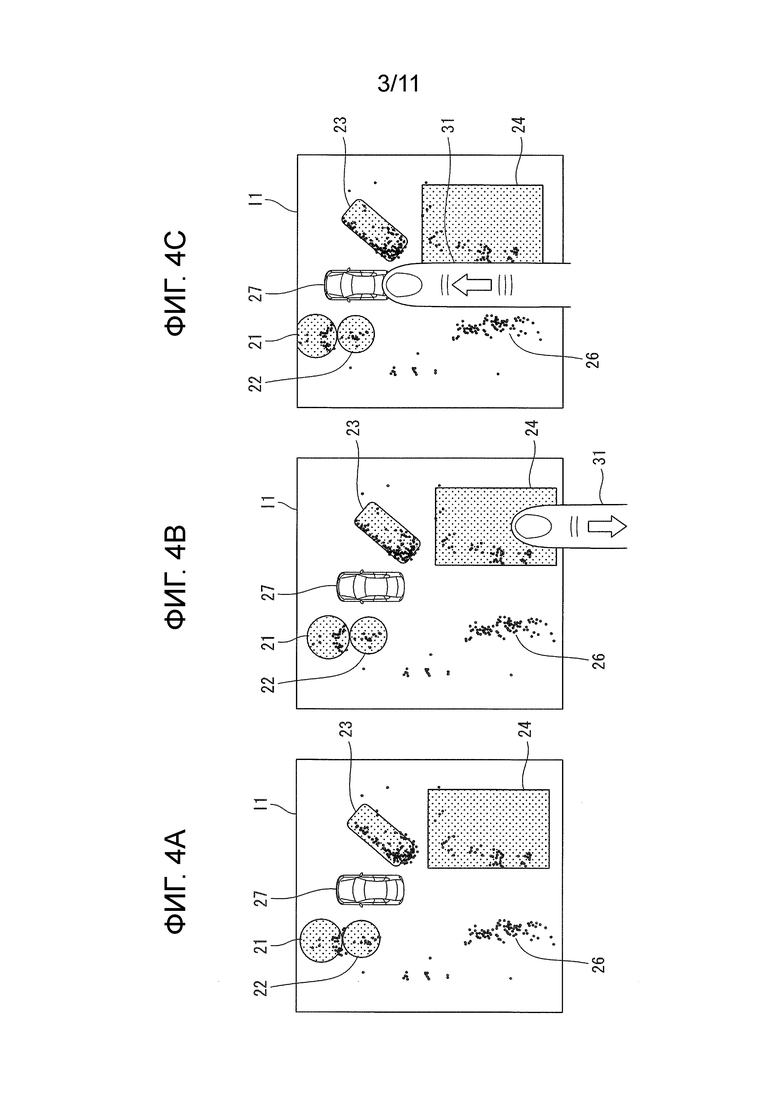
Фиг. 4A является принципиальной схемой, иллюстрирующей пример изображения, представленного в блоке представления согласно варианту осуществления настоящего изобретения;
Фиг. 4B является принципиальной схемой, иллюстрирующей пример операции для изображения, представленного в блоке представления согласно варианту осуществления настоящего изобретения;
Фиг. 4C является принципиальной схемой, иллюстрирующей другой пример операции для изображения, представленного в блоке представления согласно варианту осуществления настоящего изобретения;
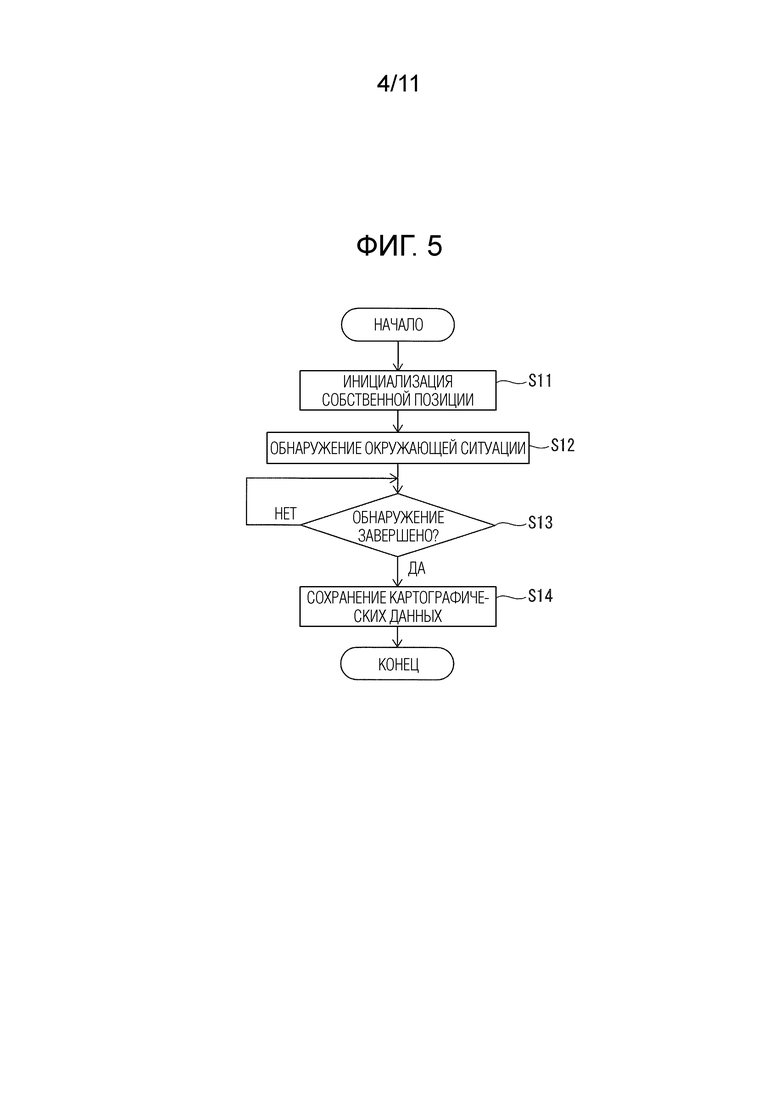
Фиг. 5 является блок-схемой, описывающей пример способа формирования картографических данных согласно варианту осуществления настоящего изобретения;
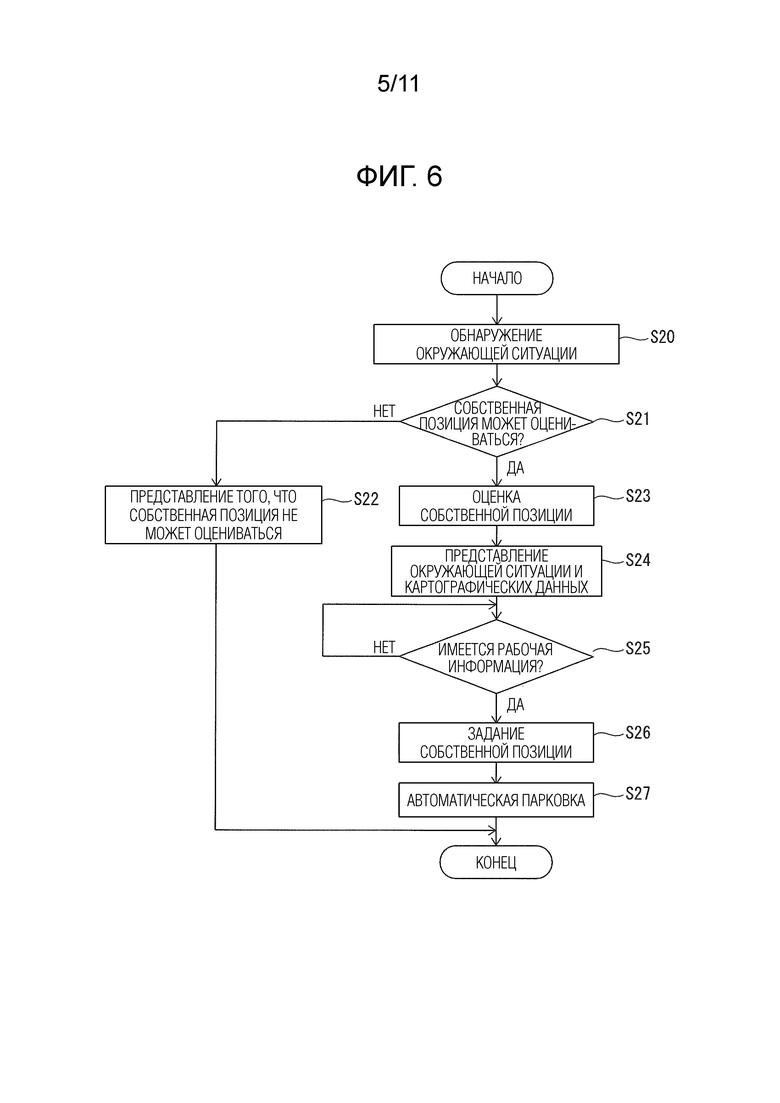
Фиг. 6 является блок-схемой, описывающей пример способа оценки собственного положения согласно варианту осуществления настоящего изобретения;
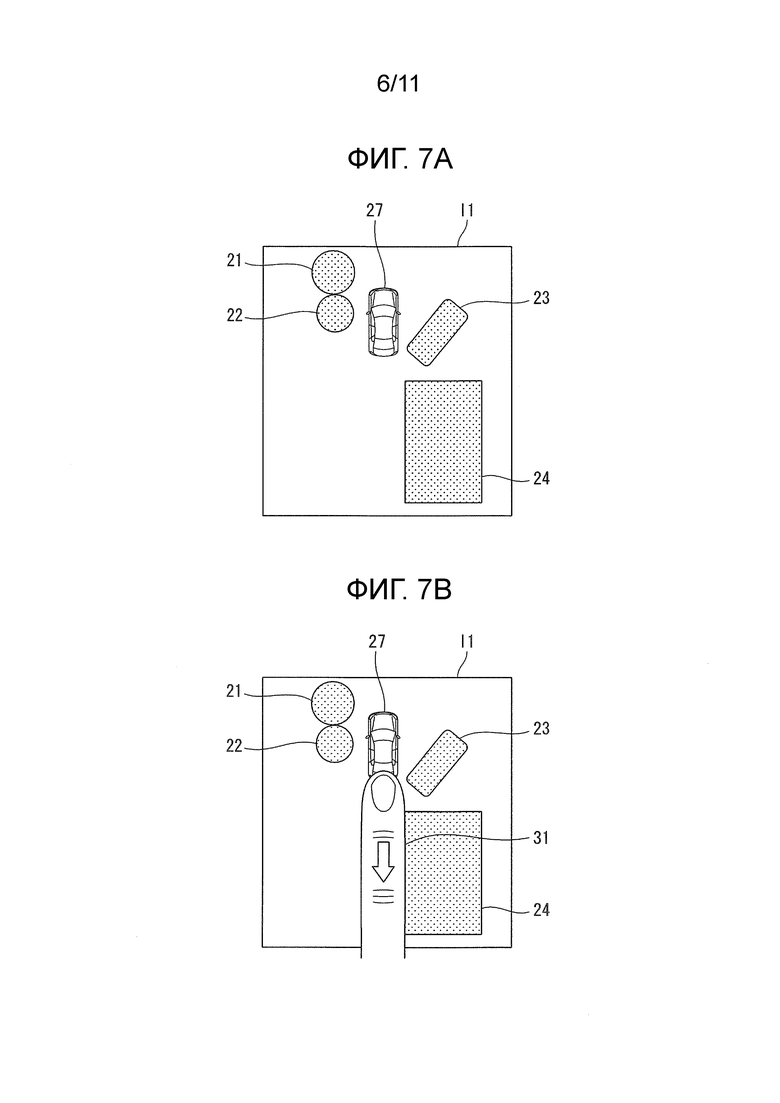
Фиг. 7A является принципиальной схемой, иллюстрирующей пример изображения, представленного в блоке представления согласно первой модификации варианта осуществления настоящего изобретения;
Фиг. 7B является принципиальной схемой, иллюстрирующей пример операции для изображения, представленного в блоке представления согласно первой модификации варианта осуществления настоящего изобретения;
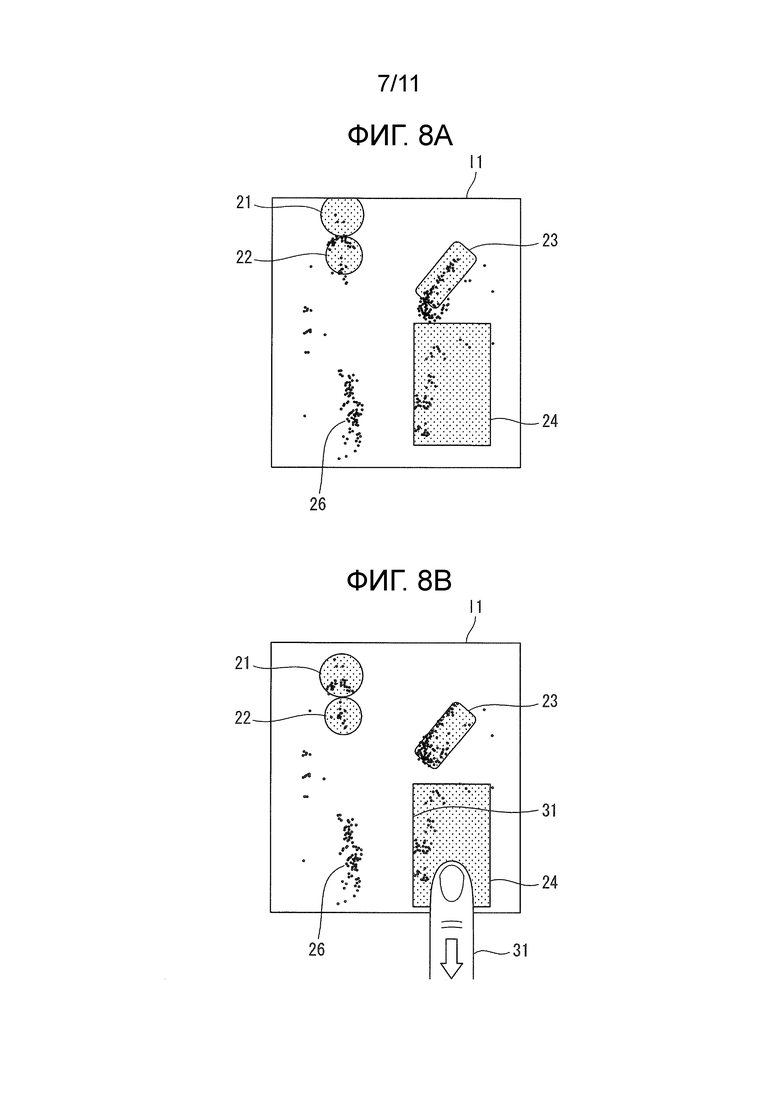
Фиг. 8A является принципиальной схемой, иллюстрирующей пример изображения, представленного в блоке представления согласно второй модификации варианта осуществления настоящего изобретения;
Фиг. 8B является принципиальной схемой, иллюстрирующей пример операции для изображения, представленного в блоке представления согласно второй модификации варианта осуществления настоящего изобретения;
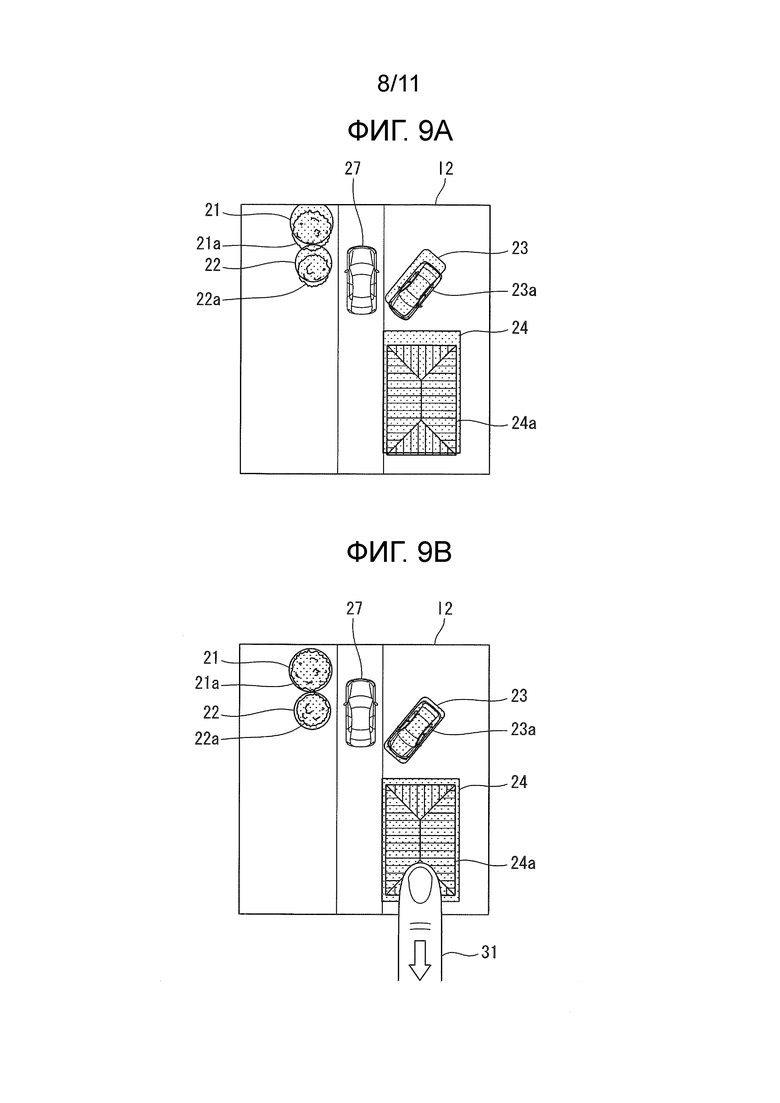
Фиг. 9A является принципиальной схемой, иллюстрирующей пример изображения, представленного в блоке представления согласно третьей модификации варианта осуществления настоящего изобретения;
Фиг. 9B является принципиальной схемой, иллюстрирующей пример операции для изображения, представленного в блоке представления согласно третьей модификации варианта осуществления настоящего изобретения;
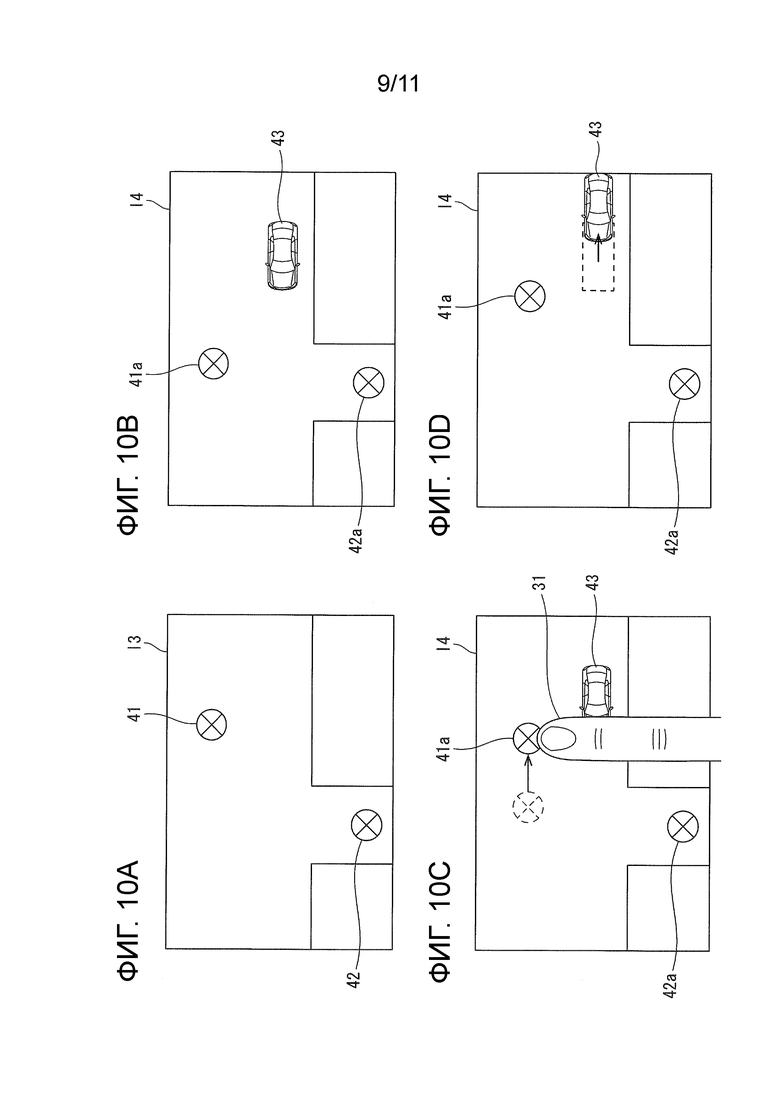
Фиг. 10A является принципиальной схемой, иллюстрирующей пример картографических данных, сохраненных в устройстве хранения данных согласно четвертой модификации варианта осуществления настоящего изобретения;
Фиг. 10B является принципиальной схемой, иллюстрирующей пример результата обнаружения датчика окружающей обстановки согласно четвертой модификации варианта осуществления настоящего изобретения;
Фиг. 10C является принципиальной схемой, иллюстрирующей пример операции по результату обнаружения датчика окружающей обстановки согласно четвертой модификации варианта осуществления настоящего изобретения;
Фиг. 10D является принципиальной схемой, иллюстрирующей пример коррекции результата обнаружения датчика окружающей обстановки согласно четвертой модификации варианта осуществления настоящего изобретения;
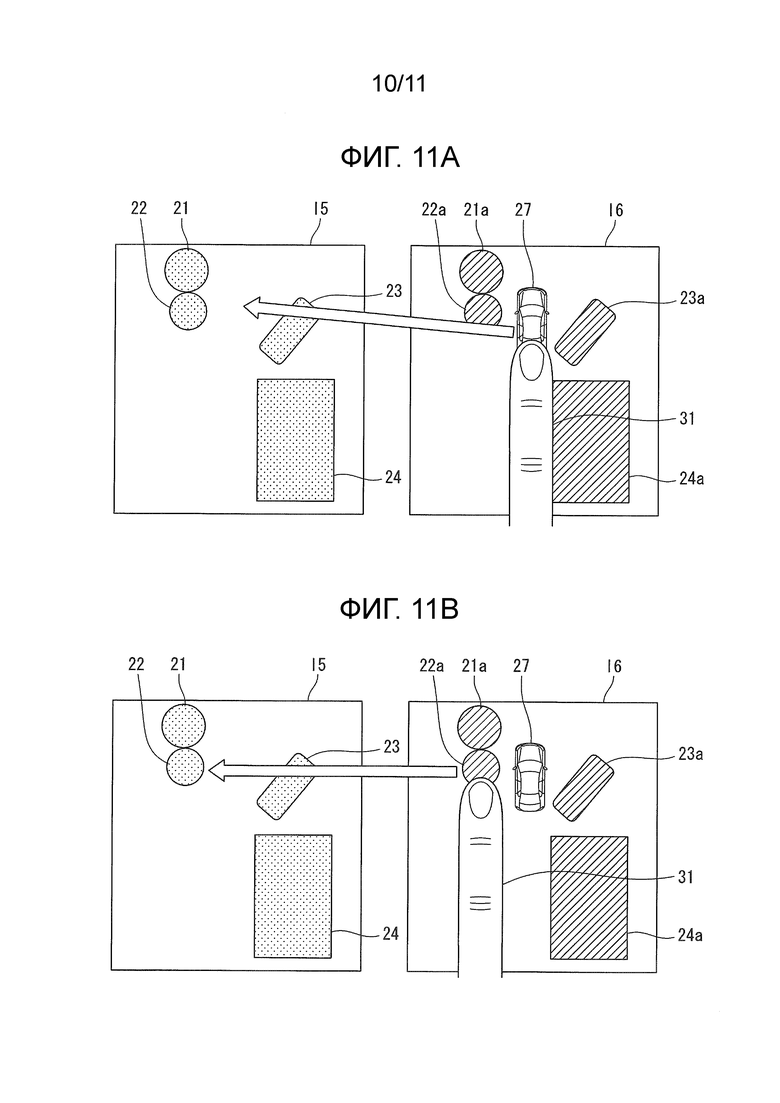
Фиг. 11A является принципиальной схемой, иллюстрирующей пример изображения, представленного в блоке представления согласно пятой модификации варианта осуществления настоящего изобретения;
Фиг. 11B является принципиальной схемой, иллюстрирующей пример операции для изображения, представленного в блоке представления согласно пятой модификации варианта осуществления настоящего изобретения;
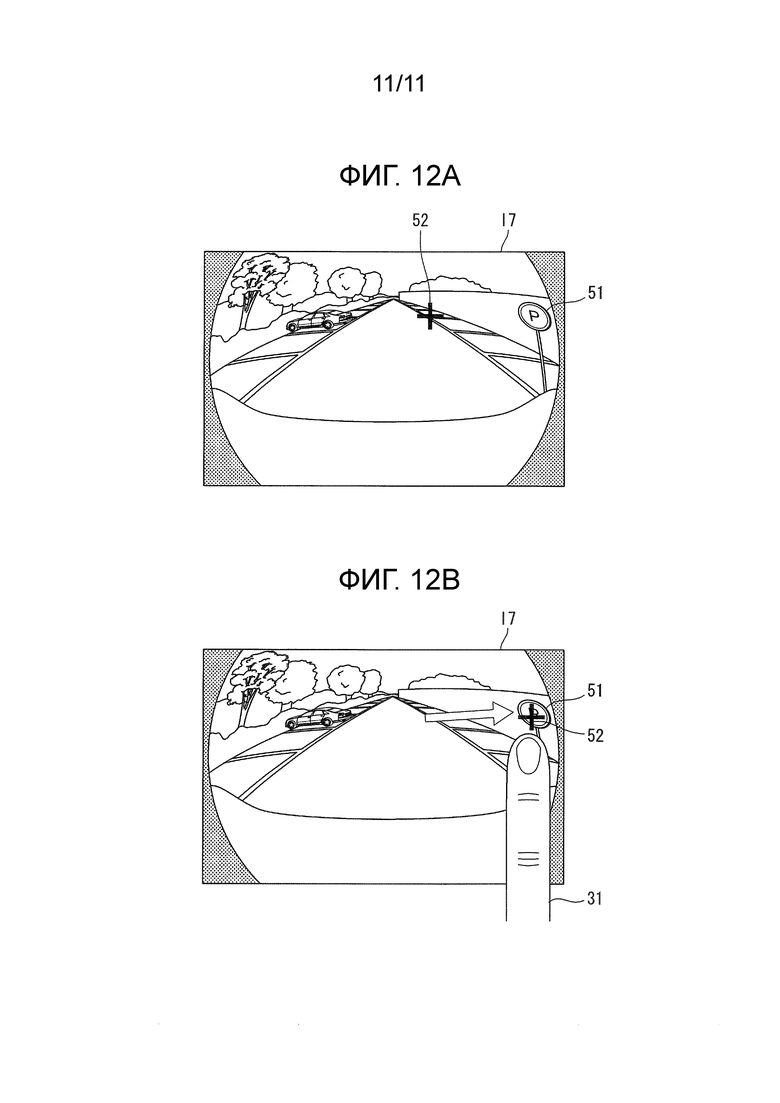
Фиг. 12A является принципиальной схемой, иллюстрирующей пример изображения, представленного в блоке представления согласно шестой модификации варианта осуществления настоящего изобретения; и
Фиг. 12B является принципиальной схемой, иллюстрирующей пример операции для изображения, представленного в блоке представления согласно шестой модификации варианта осуществления настоящего изобретения.
Осуществление изобретения
[0009] Ниже описаны варианты осуществления изобретения со ссылкой на чертежи. В нижеприведенном описании чертежей одинаковые или аналогичные ссылочные позиции присвоены одинаковым или аналогичным элементам. Тем не менее, следует отметить, что чертежи являются схематическими, соотношение между толщиной и размером на плоскости, относительная толщина и т.п. отличаются от фактических соотношений, относительных толщин и т.д. Помимо этого, очевидно, что на чертежах имеются участки, в которых взаимосвязь и соотношение размеров отличаются даже между чертежами. Помимо этого, варианты осуществления, описанные ниже, представляют собой примеры устройств и способов осуществления технической идеи изобретения, и техническая идея изобретения не ограничивает материал, форму, конструкцию, компоновку и т.п. компонентов нижеприведенным. Техническая идея изобретения может модифицироваться различными способами в пределах технического объема, определяемого формулой изобретения, как указано в формуле изобретения.
[0010] Конфигурация устройства оценки собственного положения
Устройство оценки собственного положения согласно варианту осуществления настоящего изобретения может использоваться в устройстве помощи при парковке, сохраняющем окружающую обстановку в целевом положении парковки в устройстве хранения данных и выполняющем автоматическую парковку с использованием сохраненной окружающей обстановки, и направлено на оценку положения (собственного положения) и т.п. транспортного средства-носителя в сохраненной окружающей обстановке. Устройство оценки собственного положения согласно варианту осуществления настоящего изобретения может быть установлено на транспортном средстве (далее в данном документе транспортное средство, на котором установлено устройство оценки собственного положения согласно варианту осуществления настоящего изобретения, называется «транспортным средством-носителем»). Как проиллюстрировано на фиг. 1, устройство оценки собственного положения согласно варианту осуществления настоящего изобретения включает в себя устройство 1 управления (контроллер), устройство 2 хранения данных, датчик 3 окружающей обстановки, блок 4 представления и операционный блок 5 (интерфейс).
[0011] Устройство 2 хранения данных состоит из полупроводникового устройства хранения данных, магнитного устройства хранения данных, оптического устройства хранения данных и т.п. и может составлять регистр, кэш-память, основное устройство хранения данных и т.п. Устройство 2 хранения данных сохраняет окружающую обстановку в целевом положении парковки, которая рассматривается при выполнении автоматической парковки в целевом положении парковки. Как проиллюстрировано на фиг. 2, устройство 2 хранения данных сохраняет картографические данные в качестве примера окружающей обстановки в целевом положении P1 парковки. Фиг. 2 иллюстрирует случай, в котором картографические данные представляют собой изображение вида сверху и изображение компьютерной графики (CG), но изобретение не ограничено этим. Картографические данные показывают взаимное расположение целей 21, 22, 23 и 24, присутствующих около целевого положения P1 парковки. Цели 21, 22, 23 и 24 включают в себя неподвижные стоящие объекты (помехи), такие как дорожные знаки, столбы линии электропередач, стены, деревья и припаркованные другие транспортные средства, сигнальные линии дорожной разметки на дороге, парковочные рамки и т.п. Диапазон картографических данных не ограничен конкретным образом и может представлять собой любой диапазон при условии, что автоматическая парковка в целевом положении P1 парковки является возможной.
[0012] Окружающая обстановка в целевом положении парковки, такая как картографические данные, сохраненные в устройстве 2 хранения данных, получается в результате распознавания посредством обнаружения окружающей обстановки в целевом положении парковки с использованием датчика 3 окружающей обстановки во время однократной парковки или многократной парковки. Здесь «однократная парковка» включает в себя, например, операцию до тех пор, пока транспортное средство-носитель не достигнет целевого положения парковки. Кроме того, даже в случае, если транспортное средство-носитель не достигло целевого положения парковки, «однократная парковка» включает в себя операцию, при которой транспортное средство-носитель движется около целевого положения парковки, и операцию до тех пор, пока транспортное средство-носитель не развернется около целевого положения парковки, при условии, что окружающая обстановка целевого положения парковки может обнаруживаться посредством датчика 3 окружающей обстановки.
[0013] Помимо этого, «многократная парковка» означает повторение однократной парковки, но время повторения не ограничено конкретным образом, и, например, вторая парковка может выполняться сразу после первой парковки, и вторая парковка может выполняться на следующий день после того, как выполнена первая парковка. Кроме того, многократная парковка может представлять собой такую же операцию парковки либо может представлять собой отличные друг от друга операции парковки. Например, когда парковка выполняется дважды, первая парковка может представлять собой операцию до тех пор, пока транспортное средство-носитель не достигнет целевого положения парковки, и вторая парковка может представлять собой операцию, при которой транспортное средство-носитель движется около целевого положения парковки. В случае, если многократная парковка повторяется, картографические данные могут формироваться с большей точностью посредством интегрирования и добавления окружающей обстановки, полученной для каждой парковки.
[0014] К окружающей обстановке в целевом положении парковки, сохраненной в устройстве 2 хранения данных, можно обращаться во время последующей или более поздней парковки. Время «последующей или более поздней парковки» не ограничено конкретным образом и включает в себя, например, время сразу после распознавания окружающей обстановки в целевом положении парковки и время на следующий день после дня, когда распознана окружающая обстановка в целевом положении парковки. Кроме того, операция парковки для «последующей или более поздней парковки» включает в себя операции транспортного средства-носителя, нацеленного в целевое положение парковки, к примеру, операцию транспортного средства-носителя, достигающего целевого положения парковки, и операцию транспортного средства-носителя, движущегося около целевого положения парковки.
[0015] Датчик 3 окружающей обстановки, проиллюстрированный на фиг. 1, обнаруживает окружающую обстановку для транспортного средства-носителя, включая переднюю часть, боковую часть и заднюю часть транспортного средства-носителя. В качестве датчика 3 окружающей обстановки, например, может использоваться лидар, радар миллиметрового диапазона, камера, лазерный дальномер (LRF) и т.п. Число, тип и положение размещения датчика 3 окружающей обстановки не ограничены конкретным образом, и, например, впереди, сбоку и сзади относительно транспортного средства-носителя могут быть предусмотрены множество датчиков 3 окружающей обстановки. Фиг. 3 иллюстрирует пример окружающей обстановки (данных групп точек) для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки, и группа 26 точек на фиг. 3 указывает положение контура цели (помехи). Диапазон данных групп точек, проиллюстрированный на фиг. 3, является практически идентичным диапазону картографических данных, проиллюстрированному на фиг. 2. Кроме того, диапазон данных групп точек, проиллюстрированный на фиг. 3, может быть уже диапазона картографических данных, проиллюстрированного на фиг. 2, либо может быть шире диапазона картографических данных, проиллюстрированного на фиг. 2.
[0016] В качестве блока 4 представления, проиллюстрированного на фиг. 1, может использоваться, например, дисплей, к примеру, жидкокристаллический дисплей. Блок 4 представления установлен в таком положении, как приборная панель в салоне транспортного средства, которая является легко видимой для пользователя. Операционный блок 5 принимает операцию от пользователя. Операционный блок 5 может представлять собой сенсорную панель, кнопку или переключатель блока 4 представления либо может представлять собой кнопку, переключатель и т.п., предусмотренный на центральной консоли и т.п. отдельно от блока 4 представления.
[0017] Устройство 1 управления, например, представляет собой контроллер, такой как электронный блок управления (ECU), и может состоять из компьютера, включающего в себя центральный процессор (CPU), процессора, эквивалентного компьютеру, и т.п. Устройство 1 управления может иметь программируемое логическое устройство (PLD), такое как программируемая пользователем вентильная матрица (FPGA), или может представлять собой функциональную логическую схему и т.п., заданную в полупроводниковой интегральной схеме общего назначения.
[0018] Устройство 1 управления функционально включает в себя блок 11 оценки, блок 12 управления представлением, блок 13 задания и блок 14 помощи при парковке. Блок 11 оценки сличает (сопоставляет) положение транспортного средства-носителя и положение цели в окружающей обстановке для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки, с картографическими данными, сохраненными в устройстве 2 хранения данных, таким образом оценивая положение (собственное положение) транспортного средства-носителя и положение цели в картографических данных. Например, блок 11 оценки накладывает картографические данные, проиллюстрированные на фиг. 2, и окружающую обстановку транспортного средства-носителя, проиллюстрированную на фиг. 3, так что соответствующие цели 21, 22, 23 и 24 сопоставляются. Затем положение (собственное положение) транспортного средства-носителя в картографических данных оценивается на основании относительного взаимного расположения между окружающей обстановкой для транспортного средства-носителя и транспортным средством-носителем, проиллюстрированным на фиг. 3. Здесь, в зависимости от точности датчика 3 окружающей обстановки, погоды, состояния солнечного освещения, условий парковки, таких как многоуровневая автомобильная парковка, невозможно точно сопоставить окружающую обстановку для транспортного средства-носителя и картографические данные, и в некоторых случаях положение транспортного средства-носителя в картографических данных не может точно оцениваться.
[0019] Блок 12 управления представлением определяет, обнаружена ли заданная конкретная цель (например, группа точек, соответствующая цели 24 на фиг. 2) в качестве окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки, и представляет результат определения пользователю посредством голоса или дисплея. Конкретная цель представляет собой цель, которая упрощает оценку положения транспортного средства-носителя вследствие своего положения и формы, и может задаваться надлежащим образом. В случае, если определено, что обнаружена конкретная цель, тот факт, что обнаружена конкретная цель, представляется пользователю, за счет чего пользователь может выяснить, что пользователь находится в условиях, в которых нетрудно оценить положение транспортного средства-носителя. С другой стороны, в случае если определено, что конкретная цель не обнаружена, тот факт, что конкретная цель не обнаружена, представляется пользователю, за счет чего пользователь может выяснить то, что пользователь находится в условиях, в которых непросто оценить положение транспортного средства-носителя. В этой связи, в качестве конкретной цели может задаваться только одна цель, либо могут задаваться множество целей. В случае, если задано множество целей, блок 12 управления представлением может определять, обнаружены ли все из множества целей, или определять, обнаружено ли заданное число или более из множества целей.
[0020] Как проиллюстрировано на фиг. 4A, блок 12 управления представлением предписывает блоку 4 представления представлять изображение I1, полученное посредством сличения (сопоставления) картографических данных, сохраненных в устройстве 2 хранения данных, и окружающей обстановки (данных групп точек) для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки. В блоке 4 представления могут представляться все картографические данные, либо может представляться часть картографических данных. В случае, если в блоке 4 представления представляется часть картографических данных, картографические данные могут прокручиваться вертикально и горизонтально. Аналогичным образом, блок 4 представления может представлять всю окружающую обстановку для транспортного средства-носителя, обнаруженную посредством датчика 3 окружающей обстановки, или может представлять часть окружающей обстановки. В случае, если в блоке 4 представления представляется часть окружающей обстановки, окружающая обстановка может прокручиваться вертикально и горизонтально. Кроме того, размер картографических данных, представленных в блоке 4 представления, может быть идентичным размеру окружающей обстановки, или размеры могут отличаться друг от друга. Например, вся окружающая обстановка может накладываться на часть картографических данных, представленных в блоке 4 представления. В качестве альтернативы, все картографические данные могут накладываться на часть окружающей обстановки, представленной в блоке 4 представления.
[0021] Кроме того, как проиллюстрировано на фиг. 4A, блок 12 управления представлением вызывает представление имитируемого транспортного средства 27 (пиктограммы) в положении транспортного средства-носителя в картографических данных, оцененных посредством блока 11 оценки. В этой связи, поскольку для пользователя достаточно идентифицировать положение транспортного средства-носителя в картографических данных, оцененных посредством блока 11 оценки, в блоке 4 представления может представляться такая фигура, как прямоугольник, без ограничения имитируемым транспортным средством 27.
[0022] Кроме того, блок 12 управления представлением может запрашивать пользователя осуществить операцию посредством представления пользователю символьной информации и аудиоинформации, такой как «совместите положения картографических данных и окружающей обстановки» или «совместите положения картографических данных и значка».
[0023] Когда изображение I1, проиллюстрированное на фиг. 4A, представляется в блоке 4 представления, операционный блок 5 принимает от пользователя операцию задания (регулирования) взаимного расположения между картографическими данными и по меньшей мере одним из положений транспортного средства-носителя и цели, присутствующей около транспортного средства-носителя. Например, в случае, если операционный блок 5 представляет собой сенсорную панель, как проиллюстрировано на фиг. 4B, пользователь касается и прокручивает цель 24 в картографических данных в направлении стрелки (вниз) пальцем 31, за счет чего все картографические данные, включающие в себя цели 21, 22, 23 и 24, перемещаются вниз. В результате можно сопоставлять цели 21, 22, 23 и 24 в картографических данных и соответствующей группе 26 точек. Кроме того, в случае, если ориентация картографических данных и ориентация окружающей обстановки для транспортного средства-носителя отклоняются друг от друга, все картографические данные могут вращаться посредством такой операции, как вращение двух пальцев, контактирующих с произвольным положением в картографических данных.
[0024] Кроме того, как проиллюстрировано на фиг. 4C, пользователь может касаться и прокручивать имитируемое транспортное средство 27 в направлении стрелки (вверх) пальцем 31, за счет этого перемещая имитируемое транспортное средство 27 и всю окружающую обстановку для транспортного средства-носителя вверх. Поскольку положение транспортного средства-носителя, соответствующее положению имитируемого транспортного средства 27, получается из взаимного расположения относительно окружающей обстановки для транспортного средства-носителя, окружающая обстановка для транспортного средства-носителя также перемещается по мере того, как перемещается имитируемое транспортное средство 27. В результате можно сопоставлять цели 21, 22, 23 и 24 в картографических данных и соответствующей группе 26 точек. Помимо этого, пользователь может перемещать имитируемое транспортное средство 27 и всю окружающую обстановку для транспортного средства-носителя посредством касания и прокрутки произвольного положения группы 26 точек, которая представляет собой окружающую обстановку для транспортного средства-носителя, пальцем 31.
[0025] В этой связи, вместо касания и прокрутки имитируемого транспортного средства 27, пользователь может непосредственно задавать положение транспортного средства-носителя в картографических данных посредством касания положения транспортного средства-носителя в картографических данных. В случае, если операционный блок 5 представляет собой не сенсорную панель, а кнопку, имитируемое транспортное средство 27 может перемещаться посредством нажатия кнопки. Как описано выше, способ работы для задания взаимного расположения между картографическими данными и окружающей обстановкой для транспортного средства-носителя или транспортным средством-носителем не ограничен конкретным образом, и могут быть приняты различные способы. Помимо этого, способ работы для задания взаимного расположения между картографическими данными и окружающей обстановкой для транспортного средства-носителя или транспортным средством-носителем может быть установлен заранее либо может выбираться посредством надлежащей работы операционного блока 5.
[0026] Блок 13 задания задает по меньшей мере одно из положения транспортного средства-носителя и положения цели в картографических данных на основании рабочей информации для задания взаимного расположения между картографическими данными и окружающей обстановкой для транспортного средства-носителя или транспортным средством-носителем. Например, как проиллюстрировано на фиг. 4B, в случае, если пользователь выполняет операцию задания взаимного расположения между картографическими данными и окружающей обстановкой для транспортного средства-носителя, блок 13 задания корректирует результат сличения (сопоставления) окружающей обстановки для транспортного средства-носителя и картографических данных посредством блока 11 оценки таким образом, что она представляет собой взаимное расположение, соответствующее фиг. 4B. Кроме того, блок 13 задания корректирует положение транспортного средства-носителя, оцененное посредством блока 11 оценки, на основании скорректированного результата сличения (сопоставления). Кроме того, как проиллюстрировано на фиг. 4C, в случае, если пользователь выполняет операцию задания взаимного расположения между картографическими данными и транспортным средством-носителем, блок 13 задания корректирует положение транспортного средства-носителя в картографических данных, оцененное посредством блока 11 оценки в качестве положения, соответствующего фиг. 4C.
[0027] Например, в случае, если взаимное расположение обнаруженного транспортного средства-носителя в картографических данных задается через операционный блок 5, блок 13 задания может задавать взаимное расположение обнаруженной цели в картографических данных на основании относительного взаимного расположения между транспортным средством-носителем и целью. Кроме того, в случае, если взаимное расположение обнаруженной цели в картографических данных задается через операционный блок 5, блок 13 задания может задавать взаимное расположение обнаруженного транспортного средства-носителя в картографических данных на основании относительного взаимного расположения между транспортным средством-носителем и целью.
[0028] Когда выполняется автоматическая парковка, блок 14 помощи при парковке инициализирует положение транспортного средства-носителя в картографических данных, заданных посредством блока 13 задания, в качестве начального положения для парковки. Затем блок 14 помощи при парковке выводит управляющие сигналы в различные исполнительные механизмы, установленные в транспортном средстве-носителе, для автоматической парковки транспортного средства-носителя из начального положения для парковки в целевое положение P1 парковки. Блок 14 помощи при парковке может быть предусмотрен в виде устройства помощи при парковке отдельно от устройства 1 управления.
[0029] Способ формирования картографических данных
Здесь со ссылкой на блок-схему по фиг. 5 будет далее описан пример способа формирования картографических данных, сохраненных в устройстве 2 хранения данных. На этапе S11 текущее положение транспортного средства-носителя инициализируется в качестве начального положения для парковки. На этапе S12, в то время как окружающая обстановка транспортного средства-носителя обнаруживается посредством датчика 3 окружающей обстановки, транспортное средство-носитель паркуется из начального положения для парковки в целевое положение P1 парковки. На этапе S13 определяется, завершена ли парковка в целевом положении P1 парковки, и обнаружение окружающей обстановки завершается. Датчик 3 окружающей обстановки продолжает обнаружение окружающей обстановки для транспортного средства-носителя до тех пор, пока не будет определено, что обнаружение окружающей обстановки завершается, и в случае, если определяется, что обнаружение окружающей обстановки завершается, процесс переходит к этапу S14. На этапе S14 картографические данные формируются с использованием окружающей обстановки, обнаруженной посредством датчика 3 окружающей обстановки, и сформированные картографические данные сохраняются в устройстве 2 хранения данных. В этой связи, обработка по блок-схеме по фиг. 5 может выполняться многократно, и могут приниматься картографические данные, полученные посредством интегрирования картографических данных, получаемых каждый раз.
[0030] Способ оценки собственного положения
Ниже описан пример способа оценки собственного положения согласно варианту осуществления настоящего изобретения со ссылкой на блок-схему по фиг. 6.
[0031] На этапе S20 блок 11 оценки оценивает текущее положение транспортного средства-носителя на основании сигнала глобальной системы позиционирования (GPS) и т.п. На основании оцененного текущего положения транспортного средства-носителя блок 11 оценки указывает из данных, сохраненных в устройстве 2 хранения данных, картографические данные около целевого положения P1 парковки для использования при автоматической парковке, как проиллюстрировано на фиг. 2. Как проиллюстрировано на фиг. 3, датчик 3 окружающей обстановки обнаруживает окружающую обстановку для транспортного средства-носителя.
[0032] На этапе S21 блок 11 оценки определяет, может ли быть оценено положение транспортного средства-носителя (или трудно ли оценить положение), посредством определения того, обнаружена ли конкретная цель (например, цель 24), определенная заранее, в качестве окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки. В случае, если определено, что конкретная цель не обнаружена, и положение транспортного средства-носителя не может быть оценено (или затруднительно оценить положение), процесс переходит к этапу S22, причем тот факт, что положение транспортного средства-носителя не может быть оценено (или затруднительно оценить положение), представляется пользователю через голос, представление и т.п., и процесс завершается.
[0033] С другой стороны, на этапе S21, в случае, если конкретная цель обнаружена в качестве окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки, и определено, что положение транспортного средства-носителя может быть оценено (или нетрудно оценить положение), процесс переходит к этапу S23. На этапе S23 блок 11 оценки представляет тот факт, что положение транспортного средства-носителя может быть оценено (или нетрудно оценить положение), пользователю через голос, представление и т.п. Кроме того, блок 11 оценки оценивает положение транспортного средства-носителя в картографических данных посредством сличения (сопоставления) картографических данных, сохраненных в устройстве 2 хранения данных, и окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки.
[0034] На этапе S24, как проиллюстрировано на фиг. 4A, блок 12 управления представлением предписывает блоку 4 представления представить изображение I1, которое представляет собой результат сличения (сопоставления) между картографическими данными и окружающей обстановкой для транспортного средства-носителя. Кроме того, блок 12 управления представлением представляет имитируемое транспортное средство 27 в положении транспортного средства-носителя, оцененном посредством блока 11 оценки. В этой связи, в случае, если изображение I1 представляется в блоке 4 представления, операционный блок 5 принимает операцию задания взаимного расположения между картографическими данными и по меньшей мере одним из транспортного средства-носителя и цели. Пользователь управляет операционным блоком 5 таким образом, чтобы задать корректное взаимное расположение между картографическими данными и целью или имитируемым транспортным средством 27 (корректное отклонение взаимного расположения). При отсутствии отклонения положений между картографическими данными и целью или имитируемым транспортным средством 27 пользователь может выполнять операцию для ввода того, что взаимное расположение между картографическими данными и целью или имитируемым транспортным средством 27 является корректным. Как проиллюстрировано на фиг. 4B или фиг. 4C, блок 12 управления представлением изменяет представление блока 4 представления, согласно информации операции от пользователя.
[0035] На этапе S25 блок 12 управления представлением определяет, принята ли операция от пользователя через операционный блок 5. Представление блока 4 представления продолжается до тех пор, пока не будет определено, что операция пользователя принята, и в случае, если определено, что операция пользователя принята, процесс переходит к этапу S26.
[0036] На этапе S26 на основании информации операции от пользователя блок 13 задания корректирует результат сличения окружающей обстановки для транспортного средства-носителя с картографическими данными посредством блока 11 оценки, т.е. с положением транспортного средства-носителя или положением цели в картографических данных.
[0037] На этапе S27 блок 14 помощи при парковке инициализирует положение транспортного средства-носителя в картографических данных, заданных посредством блока 13 задания, в качестве начального положения для парковки. Блок 14 помощи при парковке выводит управляющие сигналы в различные исполнительные механизмы, установленные в транспортном средстве-носителе таким образом, что транспортное средство-носитель автоматически паркуется из начального положения для парковки в целевое положение парковки с использованием картографических данных.
[0038] Программа оценки собственного положения согласно варианту осуществления настоящего изобретения предписывает компьютеру, составляющему устройство 1 управления, выполнять процедуру способа оценки собственного положения, проиллюстрированного на фиг. 6. Программа оценки собственного положения согласно варианту осуществления настоящего изобретения, например, может сохраняться в устройстве 2 хранения данных.
[0039] Как описано выше, согласно варианту осуществления настоящего изобретения, когда выполняется автоматическая парковка с использованием окружающей обстановки в целевом положении парковки, сохраненной в устройстве 2 хранения данных во время парковки в целевом положении парковки, блок 12 управления представлением представляет сохраненную окружающую обстановку (картографические данные) на блоке 4 представления. Затем операционный блок 5 принимает операцию задания взаимного расположения между сохраненной окружающей обстановкой и транспортным средством-носителем и целью, присутствующей около транспортного средства-носителя. Затем блок 13 задания задает положение транспортного средства-носителя или положение цели в сохраненной окружающей обстановке на основании упомянутой операции. Таким образом, независимо от окружения при парковке могут точно оцениваться положение транспортного средства-носителя и положение цели на карте. Следовательно, точность оценки начального положения для парковки является важной во время автоматической парковки. При этом, поскольку начальное положение для парковки может оцениваться с высокой точностью, может точно вычисляться путь из начального положения для парковки в целевое положение парковки, и транспортное средство-носитель может точно парковаться в целевом положении парковки.
[0040] Кроме того, блок 11 оценки оценивает положение транспортного средства-носителя или цели в окружающей обстановке (картографические данные) в сохраненном целевом положении парковки на основании окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки. Блок 12 управления представлением представляет положение или цель транспортного средства-носителя в сохраненной окружающей обстановке на блоке 4 представления и представляет положение или цель транспортного средства-носителя в обнаруженной окружающей обстановке на блоке 4 представления. Операционный блок 5 принимает операцию связывания положения транспортного средства-носителя или цели в сохраненной окружающей обстановке с положением транспортного средства-носителя или цели в обнаруженной окружающей обстановке. В результате при визуальном распознавании представления блока 4 представления пользователь может выполнять операцию задания таким образом, чтобы сопоставить цели 21, 22, 23 и 24 в картографических данных и группу 26 точек, указывающую положение соответствующей цели в окружающей обстановке (данных групп точек) для транспортного средства-носителя.
[0041] Кроме того, пользователь может точно выяснять относительное взаимное расположение между транспортным средством-носителем и окружающей обстановкой для транспортного средства-носителя посредством принятия изображения вида сверху в качестве картографических данных, которые представляют собой окружающую обстановку, сохраненную в устройстве 2 хранения данных, и предписания блоку 4 представления представить картографические данные в качестве изображения вида сверху. Кроме того, окружающая обстановка для транспортного средства-носителя, обнаруженная посредством датчика 3 окружающей обстановки, может представляться в блоке 4 представления в качестве изображения вида сверху. В этом случае пользователь может точно выяснять относительное взаимное расположение между транспортным средством-носителем и окружающей обстановкой для транспортного средства-носителя.
[0042] Кроме того, блок 11 оценки определяет, обнаружена ли конкретная цель для окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки, и в случае, если конкретная цель обнаружена, представляет обнаружение конкретной цели пользователю. Таким образом можно обнаруживать конкретную цель и побуждать пользователя с легкостью выяснить, что пользователь находится в условиях, в которых нетрудно оценить положение транспортного средства-носителя из относительного взаимного расположения между конкретной целью и транспортным средством-носителем. С другой стороны, в случае, если конкретная цель не обнаружена, тот факт, что конкретная цель не обнаружена, представляется пользователю. Таким образом можно побуждать пользователя с легкостью выяснить, что пользователь находится в условиях, в которых конкретная цель не может быть обнаружена, и оценка положения транспортного средства-носителя затруднена.
[0043] Кроме того, блок 11 оценки обнаруживает (оценивает) относительное взаимное расположение между транспортным средством-носителем и целью в обнаруженной окружающей обстановке в зависимости от окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки. Затем в случае, если взаимное расположение в сохраненной окружающей обстановке для любого из обнаруженного транспортного средства-носителя или цели задается через операционный блок 5, относительное расположение в сохраненной окружающей обстановке для другого из обнаруженного транспортного средства-носителя или цели задается на основании относительного взаимного расположения между транспортным средством-носителем и целью. Таким образом можно точно оценивать положение транспортного средства-носителя и положение цели в сохраненной окружающей обстановке посредством использования относительного взаимного расположения между транспортным средством-носителем и целью.
[0044] Первая модификация
В варианте осуществления настоящего изобретения, как проиллюстрировано на фиг. 4A, описан случай, в котором блок 4 представления представляет изображение I1, полученное посредством наложения картографических данных, сохраненных в устройстве 2 хранения данных, и окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки. Напротив, как проиллюстрировано на фиг. 7A, первая модификация варианта осуществления настоящего изобретения отличается от варианта осуществления настоящего изобретения тем, что окружающая обстановка для транспортного средства-носителя, обнаруженная посредством датчика 3 окружающей обстановки, не представляется, а представляются только картографические данные, сохраненные в устройстве 2 хранения данных. Картографические данные включают в себя цели 21, 22, 23 и 24. Кроме того, как проиллюстрировано на фиг. 7A, имитируемое транспортное средство 27 представляется в положении транспортного средства-носителя в картографических данных, оцененных посредством блока 11 оценки.
[0045] В этом случае пользователь визуально наблюдает фактическую окружающую обстановку для транспортного средства-носителя и выясняет взаимосвязь соответствия между фактической окружающей обстановкой для транспортного средства-носителя и представленными картографическими данными. Затем в случае, если операционный блок 5 представляет собой сенсорную панель, например, как проиллюстрировано на фиг. 7B, пользователь перетаскивает имитируемое транспортное средство 27 в направлении стрелки (вниз) пальцем 31 и отпускает имитируемое транспортное средство 27 в положении в картографических данных, соответствующем положению транспортного средства-носителя в фактической окружающей обстановке для транспортного средства-носителя. Таким образом, относительное расположение между картографическими данными и транспортным средством-носителем задается посредством перемещения имитируемого транспортного средства 27 относительно картографических данных. В этой связи пользователь может задавать относительное расположение между картографическими данными и транспортным средством-носителем посредством касания и прокрутки одной из целей 21, 22, 23 и 24 в картографических данных и перемещения всех картографических данных, включающих в себя цели 21, 22, 23 и 24, относительно имитируемого транспортного средства 27. Блок 13 задания корректирует положение транспортного средства-носителя в картографических данных, оцененных посредством блока 11 оценки, в положение, соответствующее фиг. 7B, на основании информации операции от пользователя.
[0046] В этой связи, на фиг. 7A в качестве примера иллюстрируется случай, в котором имитируемое транспортное средство 27 представляется в картографических данных, но имитируемое транспортное средство 27 может и не представляться в картографических данных. В этом случае пользователь может задавать положение транспортного средства-носителя в картографических данных посредством касания положения, соответствующего положению транспортного средства-носителя в картографических данных. В случае, в котором имитируемое транспортное средство 27 не представляется в картографических данных, окружающая обстановка для транспортного средства-носителя может не обнаруживаться посредством датчика 3 окружающей обстановки, и положение транспортного средства-носителя в картографических данных может не оцениваться посредством блока 11 оценки.
[0047] Согласно первой модификации варианта осуществления настоящего изобретения, даже в случае, если представляются только картографические данные без представления окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки, пользователь может корректно задавать взаимное расположение между картографическими данными и транспортным средством-носителем. Таким образом блок 13 задания может точно оценивать положение транспортного средства-носителя в картографических данных посредством задания положения транспортного средства-носителя в картографических данных на основании информации операции от пользователя.
[0048] Вторая модификация
В варианте осуществления настоящего изобретения, как проиллюстрировано на фиг. 4A, описан случай, в котором блок 4 представления представляет изображение I1, полученное посредством наложения картографических данных, сохраненных в устройстве 2 хранения данных, и окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки, а также представляет имитируемое транспортное средство 27. Напротив, как проиллюстрировано на фиг. 8A, вторая модификация варианта осуществления настоящего изобретения является идентичной варианту осуществления настоящего изобретения в том, что изображение I1, полученное посредством наложения картографических данных и окружающей обстановки для транспортного средства-носителя, представляется в блоке 4 представления, но отличается от варианта осуществления настоящего изобретения тем, что имитируемое транспортное средство 27 не представляется.
[0049] В этом случае, например, как проиллюстрировано на фиг. 8B, пользователь сопоставляет картографические данные и окружающую обстановку (данные групп точек) для транспортного средства-носителя посредством касания и прокрутки цели 24 в картографических данных в направлении стрелки (вниз) пальцем 31 для перемещения всех картографических данных, включающих в себя цели 21, 22, 23 и 24, в направлении вниз. Помимо этого, пользователь может сопоставлять картографические данные и окружающую обстановку (данные групп точек) для транспортного средства-носителя посредством касания и прокрутки произвольного участка группы 26 точек окружающей обстановки (данных групп точек) для транспортного средства-носителя и перемещения всей окружающей обстановки (данных групп точек) для транспортного средства-носителя. Блок 13 задания задает положение транспортного средства-носителя в картографических данных на основании информации операции от пользователя.
[0050] Согласно второй модификации варианта осуществления настоящего изобретения, даже в случае, если имитируемое транспортное средство 27 не представляется, пользователь может задавать взаимное расположение между картографическими данными и окружающей обстановкой для транспортного средства-носителя посредством представления картографических данных, сохраненных в устройстве 2 хранения данных, и окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки. Затем блок 13 задания может точно оценивать положение транспортного средства-носителя в картографических данных посредством задания положения транспортного средства-носителя в картографических данных на основании информации операции от пользователя.
[0051] Третья модификация
В варианте осуществления настоящего изобретения, как проиллюстрировано на фиг. 4A, описан случай, в котором данные групп точек используются в качестве окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки. С другой стороны, как проиллюстрировано на фиг. 9A, третья модификация варианта осуществления настоящего изобретения отличается от варианта осуществления настоящего изобретения тем, что в качестве окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки, используется снятое камерой изображение.
[0052] Как проиллюстрировано на фиг. 9A, в блоке 4 представления представляется изображение I2, полученное посредством наложения картографических данных, сохраненных в устройстве 2 хранения данных, и снятого камерой изображения в качестве окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки . Снятое камерой изображение включает в себя цели 21a, 22a, 23a и 24a, и эти цели 21a, 22a, 23a и 24a соответствуют целям 21, 22, 23 и 24 в картографических данных, сохраненных в устройстве 2 хранения данных. В этом случае, например, как проиллюстрировано на фиг. 9B, пользователь сопоставляет картографические данные и снятое камерой изображение посредством касания и прокрутки цели 24 в картографических данных в направлении стрелки (вниз) пальцем 31, перемещая все картографические данные, включающие в себя цели 21, 22, 23 и 24, вниз. В этой связи, пользователь может сопоставлять снятое камерой изображение и картографические данные посредством касания и прокрутки любой из целей 21a, 22a, 23a и 24a снятого камерой изображения, перемещая все снятое камерой изображение, включающее в себя цели 21a, 22a, 23a и 24a.
[0053] Согласно третьей модификации варианта осуществления настоящего изобретения, пользователю нетрудно интуитивно определить взаимное расположение между картографическими данными и окружающей обстановкой для транспортного средства-носителя посредством представления снятого камерой изображения в качестве окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки, по сравнению со случаем представления изображения CG.
[0054] Четвертая модификация
В качестве четвертой модификации варианта осуществления настоящего изобретения ниже описан случай, в котором отдельно задается положение цели в окружающей обстановке для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки. Фиг. 10A представляет собой изображение I3 картографических данных, сохраненных в устройстве 2 хранения данных, и имеются цели 41 и 42. Фиг. 10B представляет собой изображение I4 окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки, и включает в себя цели 41a и 42a. Цели 41a и 42a соответствуют целям 41 и 42 в картографических данных, проиллюстрированных на фиг. 10A, но положение цели 41a отклоняется от фактического положения и обнаруживается ошибочно. На фиг. 10B имитируемое транспортное средство 43 представляется в положении транспортного средства-носителя, оцененном посредством блока 11 оценки.
[0055] Блок 12 управления представлением предписывает блоку 4 представления представлять изображение I3 картографических данных, проиллюстрированных на фиг. 10A, и изображение I4 окружающей обстановки для транспортного средства-носителя, проиллюстрированной на фиг. 10B, рядом друг с другом. Как проиллюстрировано на фиг. 10C, пользователь выполняет операцию задания положения цели 41a посредством перетаскивания цели 41a в окружающей обстановке для транспортного средства-носителя в направлении стрелки (в направлении вправо) пальцем 31 и отпускания цели 41a в корректном положении. Блок 13 задания задает (корректирует) положение цели 41a в окружающей обстановке для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки, на основании информации операции от пользователя. Кроме того, блок 13 задания задает (корректирует) положение транспортного средства-носителя, как проиллюстрировано на фиг. 10D, на основании относительного взаимного расположения между скорректированными целями 41a и 42a и транспортным средством-носителем.
[0056] Согласно четвертой модификации варианта осуществления настоящего изобретения, может отдельно задаваться положение цели в окружающей обстановке для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки, и положение транспортного средства-носителя может задаваться на основании заданной окружающей обстановки для транспортного средства-носителя.
[0057] Пятая модификация
В варианте осуществления настоящего изобретения, как проиллюстрировано на фиг. 4A, описан случай, в котором блок 4 представления представляет изображение I1, полученное посредством наложения картографических данных, сохраненных в устройстве 2 хранения данных, и окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки. С другой стороны, как проиллюстрировано на фиг. 11A, пятая модификация варианта осуществления настоящего изобретения отличается от варианта осуществления настоящего изобретения тем, что картографические данные и окружающая обстановка для транспортного средства-носителя размещаются рядом без наложения.
[0058] Левая сторона по фиг. 11A представляет собой изображение I5 картографических данных, сохраненных в устройстве 2 хранения данных, и включает в себя цели 21, 22, 23 и 24. В этой связи, в изображении I5 картографических данных может представляться имитируемое транспортное средство, представляющее положение транспортного средства-носителя в картографических данных, оцененных посредством блока 11 оценки. Правая сторона по фиг. 11A представляет собой изображение I6 CG окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки, и включает в себя цели 21a, 22a, 23a и 24a. Изображение I6 CG окружающей обстановки для транспортного средства-носителя может формироваться, например, на основании данных групп точек или снятого камерой изображения. В изображении I6 CG окружающей обстановки для транспортного средства-носителя имитируемое транспортное средство 27 представляется в положении транспортного средства-носителя, оцененном посредством блока 11 оценки.
[0059] Например, как проиллюстрировано на фиг. 11A, пользователь задает положение транспортного средства-носителя в картографических данных посредством перетаскивания имитируемого транспортного средства 27 в изображении I6 окружающей обстановки для транспортного средства-носителя на правой стороне и перемещения имитируемого транспортного средства 27, как указано стрелкой, отпуская имитируемое транспортное средство 27 в положении на изображении I5 картографических данных на левой стороне. Блок 13 задания задает положение, в которое перетаскивается имитируемое транспортное средство 27 в картографических данных, в качестве положения транспортного средства-носителя на основании информации операции от пользователя.
[0060] В качестве альтернативы, как проиллюстрировано на фиг. 11B, пользователь может задавать цель 22a в окружающей обстановке для транспортного средства-носителя таким образом, что она сопоставляется с целью 22 в картографических данных, посредством перетаскивания цели 22a в изображении I6 окружающей обстановки для транспортного средства-носителя на правой стороне и перемещения цели 22a, как указано стрелкой, отпуская цель 22a в положении цели 22 изображения I5 картографических данных на левой стороне. На основании информации операции от пользователя блок 13 задания корректирует результат сличения (сопоставления) картографических данных и окружающей обстановки для транспортного средства-носителя таким образом, что положение цели 22 в картографических данных сопоставляется с положением цели 22a в окружающей обстановке для транспортного средства-носителя. Кроме того, блок 13 задания корректирует положение транспортного средства-носителя в картографических данных, оцененных посредством блока 11 оценки, на основании результата сличения (сопоставления) скорректированных картографических данных и окружающей обстановки для транспортного средства-носителя.
[0061] Согласно пятой модификации варианта осуществления настоящего изобретения, даже в случае, если картографические данные, сохраненные в устройстве 2 хранения данных, и окружающая обстановка для транспортного средства-носителя, обнаруженная посредством датчика 3 окружающей обстановки, представляются рядом друг с другом, пользователь может задавать взаимное расположение между картографическими данными и окружающей обстановкой для транспортного средства-носителя или транспортным средством-носителем. Затем блок 13 задания может точно оценивать положение транспортного средства-носителя в картографических данных посредством коррекции положения транспортного средства-носителя в картографических данных, оцененных посредством блока 11 оценки, на основании информации операции от пользователя.
[0062] Шестая модификация
В варианте осуществления настоящего изобретения, как проиллюстрировано на фиг. 4A, описан случай, в котором блок 4 представления представляет изображение I1 вида сверху, полученное посредством наложения картографических данных, сохраненных в устройстве 2 хранения данных, и окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки. С другой стороны, как проиллюстрировано на фиг. 12A, шестая модификация варианта осуществления настоящего изобретения отличается от варианта осуществления настоящего изобретения тем, что представляется изображение I7 спереди, полученное посредством наложения картографических данных, сохраненных в устройстве 2 хранения данных, и окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки.
[0063] Как проиллюстрировано на фиг. 12A, картографические данные, сохраненные в устройстве 2 хранения данных, включают в себя знак 52 креста, соответствующий дорожному знаку 51. На фиг. 12A окружающая обстановка для транспортного средства-носителя, обнаруженная посредством датчика 3 окружающей обстановки, включает в себя парковочную рамку и дорожный знак 51. Когда блок 11 оценки сличает (сопоставляет) картографические данные, сохраненные в устройстве 2 хранения данных, и окружающую обстановку для транспортного средства-носителя, обнаруженную посредством датчика 3 окружающей обстановки, блок 11 оценки ошибочно распознает лужу и т.п., обнаруженную посредством датчика 3 окружающей обстановки, в качестве дорожного знака 51, так что знак 52 креста в картографических данных, сохраненных в устройстве 2 хранения данных, и положение дорожного знака 51 совмещаются таким образом, что они отклоняются относительно друг от друга.
[0064] Как проиллюстрировано на фиг. 12B, пользователь устанавливает знак 52 креста таким образом, что он совмещается с дорожным знаком 51, посредством перетаскивания знака 52 креста картографических данных пальцем и отпускания знака 52 креста в положении дорожного знака 51. На основании информации от пользователя блок 13 задания корректирует результат сличения (сопоставления) картографических данных и окружающей обстановки для транспортного средства-носителя таким образом, что положение знака 52 креста картографических данных совмещается с положением дорожного знака 51. Кроме того, блок 13 задания корректирует положение транспортного средства-носителя в картографических данных, оцененных посредством блока 11 оценки, на основании результата сличения (сопоставления) скорректированных картографических данных и окружающей обстановки для транспортного средства-носителя.
[0065] Согласно шестой модификации варианта осуществления настоящего изобретения, даже в случае, если представляется изображение I7 спереди, полученное посредством наложения картографических данных, сохраненных в устройстве 2 хранения данных, и окружающей обстановки для транспортного средства-носителя, обнаруженной посредством датчика 3 окружающей обстановки, пользователь может задавать взаимное расположение между картографическими данными и окружающей обстановкой для транспортного средства-носителя. Затем блок 13 задания может точно оценивать положение транспортного средства-носителя в картографических данных посредством коррекции положения транспортного средства-носителя в картографических данных, оцененных блоком 11 оценки, на основании информации операции от пользователя.
[0066] Другие варианты осуществления
Как описано выше, изобретение описано в соответствии с вариантами осуществления, но это не следует понимать так, что описание и чертежи, составляющие часть этого описания, ограничивают изобретение. Различные альтернативные варианты осуществления, примеры и технологии работы должны стать очевидными для специалистов в данной области техники с учетом данного описания.
[0067] В варианте осуществления настоящего изобретения описан случай, в котором картографические данные представляются в качестве изображения CG, и окружающая обстановка для транспортного средства-носителя, обнаруженная посредством датчика 3 окружающей обстановки, представляется в качестве данных групп точек, но изобретение не ограничено этим. Например, картографические данные могут представляться в качестве снятого камерой изображения, и окружающая обстановка для транспортного средства-носителя, обнаруженная посредством датчика 3 окружающей обстановки, может представляться в качестве снятого камерой изображения. В качестве альтернативы, картографические данные могут представляться в качестве снятого камерой изображения, и окружающая обстановка для транспортного средства-носителя, обнаруженная посредством датчика 3 окружающей обстановки, может представляться в качестве изображения CG. В качестве альтернативы, картографические данные могут представляться в качестве изображения CG, и окружающая обстановка для транспортного средства-носителя, обнаруженная датчиком 3 окружающей обстановки, может представляться в качестве снятого камерой изображения.
[0068] Кроме того, в варианте осуществления настоящего изобретения описан случай, в котором блок 4 представления представляет собой дисплей, но блок 4 представления может представлять собой устройство, отличное от дисплея. Например, в случае, если блок 4 представления представляет собой громкоговоритель, блок 4 представления может представлять пользователю окружающую обстановку в сохраненном целевом положении парковки или окружающую обстановку для транспортного средства-носителя, обнаруженную посредством датчика 3 окружающей обстановки, посредством вывода голоса, который описывает окружающую обстановку в сохраненном целевом положении парковки или окружающую обстановку для транспортного средства-носителя, обнаруженную посредством датчика 3 окружающей обстановки.
[0069] Как описано выше, само собой разумеется, что изобретение включает в себя различные варианты осуществления и тому подобное, не описанные в данном документе. Следовательно, объем изобретения определяется посредством только характеризующих изобретение сведений, связанных с собственно формулой изобретения, с учетом вышеприведенного описания.
Список условных обозначений
[0070] 1 - устройство управления
2 - устройство хранения данных
3 - датчик окружающей обстановки
4 - блок представления
5 - операционный блок
11 - блок оценки
12 - блок управления представлением
13 - блок задания
14 - блок помощи при парковке
Изобретение относится к системам помощи при парковке. Способ оценки собственного положения для устройства помощи при парковке, которое сохраняет окружающую обстановку в целевом положении парковки в устройстве хранения данных и выполняет автоматическую парковку с использованием сохраненной окружающей обстановки при парковке в целевом положении парковки. Способ содержит этап, на котором представляют сохраненную окружающую обстановку, этап, на котором принимают операцию задания относительного взаимного расположения между сохраненной окружающей обстановкой и транспортным средством-носителем и целью, присутствующей около транспортного средства-носителя, и этап, на котором задают положение транспортного средства-носителя или положение цели в сохраненной окружающей обстановке на основании упомянутой операции. Достигается повышение безопасности управления транспортным средством. 4 н. и 4 з.п. ф-лы, 22 ил.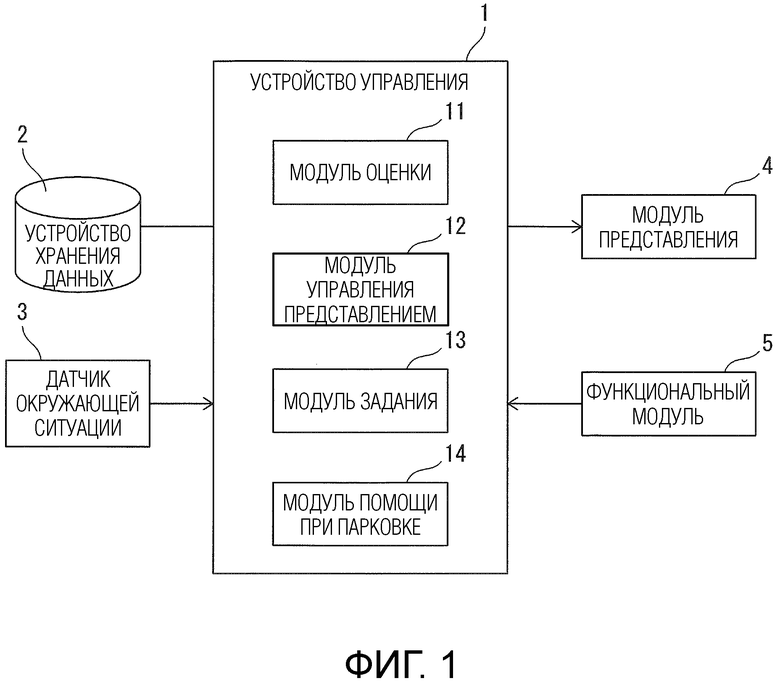
1. Способ оценки собственного положения для устройства помощи при парковке, которое сохраняет окружающую обстановку в целевом положении парковки в устройстве хранения данных и выполняет автоматическую парковку с использованием сохраненной окружающей обстановки при парковке в целевом положении парковки, при этом способ содержит:
- этап, на котором представляют сохраненную окружающую обстановку;
- этап, на котором принимают операцию задания относительного взаимного расположения между сохраненной окружающей обстановкой и транспортным средством-носителем и целью, присутствующей около транспортного средства-носителя; и
- этап, на котором задают положение транспортного средства-носителя или положение цели в сохраненной окружающей обстановке на основании упомянутой операции.
2. Способ оценки собственного положения для устройства помощи при парковке, которое сохраняет окружающую обстановку в целевом положении парковки в устройстве хранения данных и выполняет автоматическую парковку с использованием сохраненной окружающей обстановки при парковке в целевом положении парковки, при этом способ содержит:
- этап, на котором представляют сохраненную окружающую обстановку;
- этап, на котором принимают операцию взаимного расположения между сохраненной окружающей обстановкой и транспортным средством-носителем и целью, присутствующей около транспортного средства-носителя; и
- этап, на котором корректируют положение транспортного средства-носителя или положение цели в сохраненной окружающей обстановке на основании упомянутой операции.
3. Способ оценки собственного положения по п. 1 или 2, дополнительно содержащий:
- этап, на котором обнаруживают окружающую обстановку для транспортного средства-носителя; и
- этап, на котором оценивают положение транспортного средства-носителя или цели в сохраненной окружающей обстановке на основании обнаруженной окружающей обстановки,
- при этом на этапе представления представляют положение транспортного средства-носителя или цели в сохраненной окружающей обстановке и представляют положение транспортного средства-носителя или цели в обнаруженной окружающей обстановке и
- при этом на этапе приема принимают операцию связывания положения транспортного средства-носителя или цели в сохраненной окружающей обстановке с положением транспортного средства-носителя или цели в обнаруженной окружающей обстановке.
4. Способ оценки собственного положения по п. 3, в котором сохраненная окружающая обстановка или обнаруженная окружающая обстановка представляется в виде изображения вида сверху.
5. Способ оценки собственного положения по 3, дополнительно содержащий:
- этап, на котором определяют, обнаружена ли заданная конкретная цель в качестве обнаруженной окружающей обстановки; и
- этап, на котором представляют обнаружение конкретной цели пользователю в случае, если конкретная цель обнаружена.
6. Способ оценки собственного положения по п. 3, дополнительно содержащий:
- этап, на котором обнаруживают относительное взаимное расположение между транспортным средством-носителем и целью в обнаруженной окружающей обстановке в соответствии с окружающей обстановкой для транспортного средства-носителя,
- при этом на этапе задания положения транспортного средства-носителя или положения цели задают взаимное расположение в сохраненной окружающей обстановке для другого из обнаруженного транспортного средства-носителя или цели на основании относительного взаимного расположения в случае, если задано взаимное расположение в сохраненной окружающей обстановке для любого из обнаруженного транспортного средства-носителя или цели.
7. Устройство оценки собственного положения для устройства помощи при парковке, выполненного с возможностью сохранения окружающей обстановки в целевом положении парковки в устройстве хранения данных и выполнения автоматической парковки с использованием сохраненной окружающей обстановки при парковке в целевом положении парковки, причем устройство оценки собственного положения содержит:
- блок представления, выполненный с возможностью представления сохраненной окружающей обстановки;
- интерфейс, выполненный с возможностью приема операции задания относительного взаимного расположения между сохраненной окружающей обстановкой и транспортным средством-носителем и целью, присутствующей около транспортного средства-носителя, когда представляется сохраненная окружающая обстановка; и
- контроллер, выполненный с возможностью задания положения транспортного средства-носителя или положения цели в сохраненной окружающей обстановке на основании упомянутой операции.
8. Устройство оценки собственного положения для устройства помощи при парковке, выполненного с возможностью сохранения окружающей обстановки в целевом положении парковки в устройстве хранения данных и выполнения автоматической парковки с использованием сохраненной окружающей обстановки при парковке в целевом положении парковки, причем устройство оценки собственного положения содержит:
- блок представления, выполненный с возможностью представления сохраненной окружающей обстановки;
- интерфейс, выполненный с возможностью приема операции взаимного расположения между сохраненной окружающей обстановкой и транспортным средством-носителем и целью, присутствующей около транспортного средства-носителя, когда представляется сохраненная окружающая обстановка; и
- контроллер, выполненный с возможностью коррекции положения транспортного средства-носителя или положения цели в сохраненной окружающей обстановке на основании упомянутой операции.
| US 9020746 B2, 24.04.2015 | |||
| US 9020746 B2, 28.04.2015 | |||
| УСТРОЙСТВО И СПОСОБ РАСПОЗНАВАНИЯ ДОРОЖНЫХ ЗНАКОВ | 2011 |
|
RU2571833C2 |

