Заявляемое техническое решение относится к области радиолокации, в частности, к области сопровождения параметров траектории объекта с помощью обзорной радиолокационной станции (РЛС). Параметрами траектории объекта могут быть его координаты, скорость, пространственная ориентация и другие.
Задача экстраполяции параметра траектории сопровождаемого объекта состоит в определении значения параметра в известный момент времени в точке, лежащей вне интервала наблюдения, по его значениям внутри этого интервала (Кузьмин С.З. Основы теории обработки радиолокационной информации. - М., 1974, стр. 229).
Известным способом экстраполяции параметров траектории сопровождаемого объекта является способ, основанный на непосредственном расчете параметров траектории по данным выборочных значений координат в предположении, что объект движется по траектории известного вида, то есть параметр изменяется в соответствии с предполагаемым законом (Кузьмин С.З. Основы теории обработки радиолокационной информации. - М., 1974, стр. 229).
Однако, предусмотреть вид функции, с помощью которой параметр траектории аппроксимируется в данный момент наилучшим образом, как правило, невозможно. На практике часто ограничиваются упрощенной моделью движения: линейной либо квадратичной.
Если вид аппроксимирующей функции выбран неправильно, то возникают ошибки, тем  чем более отдаленной от реальной траектории является аппроксимирующая функция. Ошибки экстраполяции приводят к увеличению размеров стробов сопровождения, а значит к увеличению временных и энергетических затрат на сопровождение траектории объекта и в конечном счете - к уменьшению пропускной способности РЛС.
чем более отдаленной от реальной траектории является аппроксимирующая функция. Ошибки экстраполяции приводят к увеличению размеров стробов сопровождения, а значит к увеличению временных и энергетических затрат на сопровождение траектории объекта и в конечном счете - к уменьшению пропускной способности РЛС.
Таким образом, недостатком известного способа является необходимость достаточно точного предположения о законе изменения параметров траектории сопровождаемого объекта.
Наиболее близкий к заявляемому способ экстраполяции параметров траектории сопровождаемого объекта основан на аппарате искусственных нейронных сетей (ИНС), описанный, например, в работе «Разработка нейросетевого экстраполятора в системе вторичной обработки радиорелейной информации». Истратов А.Ю., Бобин А.В. (International scientific-practical conference «Innovative Information Technologies». Prague - 2013, April 22-26. Part 3 Innovative Information Technologies In Industry, p. 153-164 (Международная научно-практическая конференция «Инновационные информационные технологии», Прага, 2013, апрель 22-26. Часть 3, «Инновационные информационные технологии в промышленности», стр. 153-164)).
При этом используется свойство ИНС обучаться, то есть изменять свои коэффициенты на основе полученных данных - обучающей выборки.
Наиболее близкий способ включает следующие действия на каждом обзоре над экстраполируемым параметром траектории сопровождаемого объекта: обнаружение объекта в стробе и измерение экстраполируемого параметра траектории объекта, формирование обучающей выборки и определение соответствующих этой обучающей выборке коэффициентов ИНС (обучение ИНС), экстраполяцию параметра на следующий обзор с помощью обученной ИНС, расчет размеров строба на следующий обзор.
При экстраполяции нескольких параметров траектории экстраполяция каждого параметра осуществляется независимо друг от друга.
Недостаток наиболее близкого способа состоит в следующем. Для надежного обучения ИНС требуется достаточно большое количество (нескольких десятков) измерений параметра на интервале наблюдения с не устаревшими (актуальными) значениями параметра. Интервал наблюдения с актуальными значениями параметра характеризуется тем, что при любом маневре объекта по этому параметру для обеспечения экстраполяции с ошибками, не превосходящими допустимые, все значения обучающей выборки, должны находиться в пределах этого интервала. Такие требования к обучающей выборке означают необходимость большого ее объема, который при сопровождении скоростных и маневрирующих объектов может быть получен только в РЛС с очень высоким темпом обращения к объекту (одно и более обращений в секунду). А поскольку в типичных обзорных РЛС темп обращения к объекту весьма небольшой (5-10 обращений в минуту), то обучающая выборка остается актуальной в пределах не более трех обращений к объекту, что для качественного обучения ИНС и экстраполяции параметра объекта с ее помощью наиболее близким способом недостаточно. В результате экстраполяция скоростных и маневрирующих объектов наиболее близким способом осуществляется с ошибками, превосходящими допустимые, что, как уже отмечалось, приводит к увеличению размеров стробов сопровождения, а значит к увеличению временных и энергетических затрат на сопровождение траекторий объектов и в конечном счете - к уменьшению пропускной способности РЛС.
Таким образом, техническим результатом (решаемой технической проблемой) является увеличение пропускной способности РЛС вследствие уменьшения временных и энергетических затрат на сопровождение траекторий радиолокационных объектов за счет уменьшения ошибок экстраполяции параметров траектории при малом количестве их измерений.
Технический результат достигается тем, что в способе экстраполяции параметров траектории сопровождаемого объекта с помощью устройства экстраполяции параметра траектории, выполненного на основе ИНС, формирующего на текущем обзоре РЛС обучающую выборку, определяют соответствующие этой выборке коэффициенты ИНС и осуществляют экстраполяцию параметра на следующий обзор, согласно изобретению, обучающую выборку формируют на текущем обзоре РЛС из трех последних измеренных с помощью РЛС значений экстраполируемого параметра, дополняя каждое из них случайными значениями параметра, полученными с помощью генератора дополнительных случайных значений параметра в интервале значений, учитывающих известные ошибки его измерения, при этом экстраполяцию параметра на следующий обзор осуществляют по двум последним измеренным его значениям с помощью ИНС, коэффициенты которой определены в соответствии с упомянутой обучающей выборкой.
Изобретение иллюстрируется чертежом, на котором приведена функциональная схема устройства экстраполяции параметра траектории.
Рассмотрим суть заявляемого технического решения.
В заявляемом техническом решении для экстраполяции параметра траектории применяется аппарат искусственных нейронных сетей (Татузов А.Л. Нейронные сети в задачах радиолокации. Кн. 28 - М.: Радиотехника, 2009. (Научная серия «Нейрокомпьютеры и их применение»)).
Как уже отмечалось, основная проблема в применении ИНС для экстраполяции параметров траектории скоростных маневрирующих объектов заключается в обучении ИНС по обучающей выборке, состоящей не более чем из трех значений экстраполируемого параметра. При обучающей выборке такого объема невозможно обеспечить качественное обучение ИНС, а следовательно, и осуществить экстраполяцию параметра траектории в пределах допустимой ошибки.
ИНС считается обученной, если в результате обучения коэффициенты ИНС становятся такими, что при каждом новом значении параметра из обучающей выборки выходное значение параметра в пределах допустимой ошибки остается постоянным.
Методы обучения ИНС хорошо известны: Федосин С.А., Ладяев Д.А., Марьина О.А. Анализ и сравнение методов обучения нейронных сетей. Вестник мордовского университета, 2010, №4. Серия «Физико-математические науки»; Портал знаний об искусственном интеллекте neuronus.com 2013-2018. Обучение нейронных сетей: https://neuronus.com/theory/nn/238-obucheniya-nejronnoi-seti.html/.
В изобретении обучающая выборка, формируется из трех измеренных значений экстраполируемого параметра, каждое из которых дополнено случайными значениями этого параметра, сгенерированными в интервале значений, учитывающем известные ошибки его измерения. Количество дополнительных значений параметра определяется исходя из допустимых ошибок его экстраполяции. Как показывают исследования, обычно требуется не более нескольких десятков значений.
Используемая в изобретении возможность применения в обучающей выборке случайных сгенерированных значений экстраполируемого параметра следует из того, что измеренные значения параметра всегда случайны в интервале, определяемом ошибками его измерения, и поэтому сгенерированные указанным образом значения статистически не отличаются от измеренных.
Сформированная таким образом обучающая выборка позволяет провести полноценное обучение ИНС, а затем с использованием обученной таким образом ИНС по двум измеренным на обзоре значениям параметра осуществить его экстраполяцию на следующий обзор. Ошибка экстраполяции при этом не превосходит допустимую.
Таким образом достигается заявляемый технический результат.
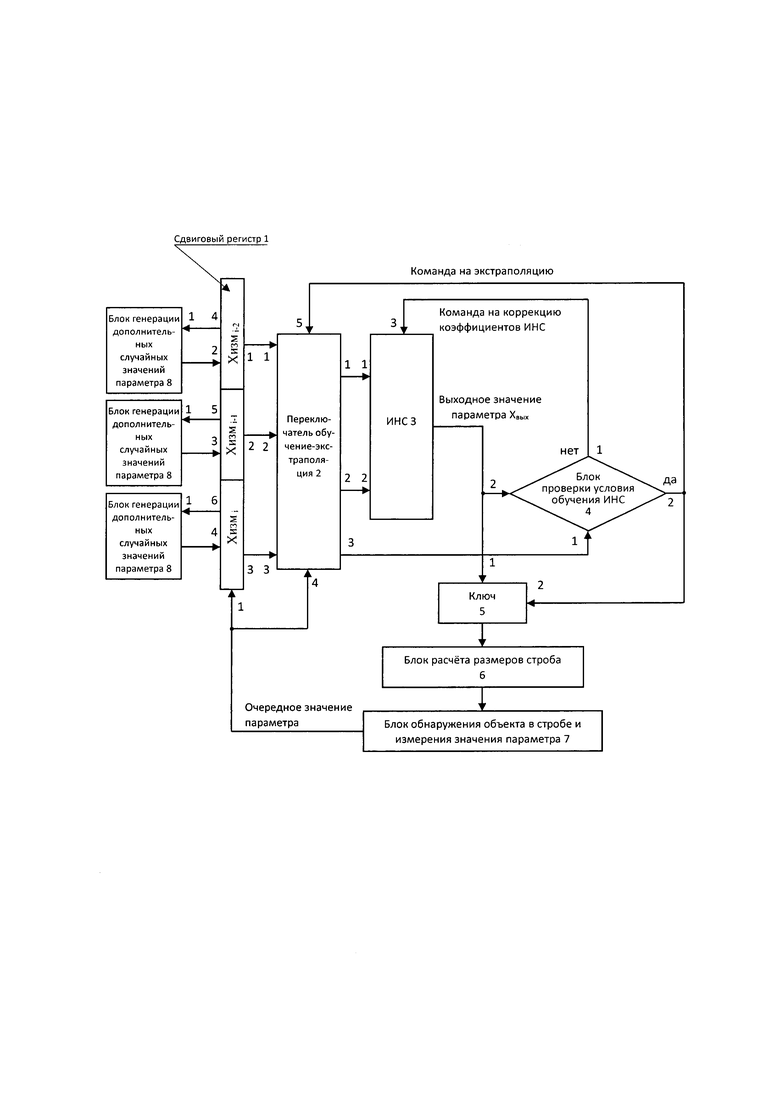
Заявляемый способ может быть осуществлен с помощью приведенного на чертеже устройства, которое содержит сдвиговый регистр 1, переключатель обучение-экстраполяция 2, искусственную нейронную сеть 3, блок проверки условия обучения ИНС 4, ключ 5, блок расчета размеров строба 6, блок обнаружения объекта в стробе и измерения значения параметра 7, блок генерации дополнительных случайных значений параметра 8, при этом первый, второй и третий выходы сдвигового регистра 1 соединены с соответствующими входами переключателя обучение-экстраполяция 2, первый и второй выходы которого соединены с первым и вторым входами ИНС 3, третий выход переключателя 2 соединен с первым входом блока проверки условия обучения ИНС 4, выход ИНС 3 соединен со вторым входом блока проверки условия обучения ИНС 4 и первым входом ключа 5, первый выход блока проверки условия обучения ИНС 4 соединен с третьим входом ИНС 3, второй выход блока проверки условия обучения ИНС 4 соединен с пятым входом переключателя обучение-экстраполяция 2 и вторым входом ключа 5, выход ключа 5 соединен со входом блока расчета размеров строба 6, выход которого соединен со входом блока обнаружения объекта в стробе и измерения параметра 7, выход которого соединен с первым входом сдвигового регистра 1 и четвертым входом переключателя обучение-экстраполяция 2, входы блока генерации дополнительных случайных значений параметра 8, соединены с четвертым, пятым и шестым выходами сдвигового регистра 1, выходы блока 8 соединены со вторым, третьим и четвертым входами сдвигового регистра 1.
Устройство может быть выполнено с использованием следующих функциональных элементов.
Сдвиговый регистр 1 - сдвиговый регистр последовательного входа с тремя многоразрядными ячейками (Интегральные микросхемы. Справочник под ред. Б В. Тарабрина. - М., Радио и связь, 1984).
Искусственная нейронная сеть (ИНС) 3 - искусственная нейронная сеть с двумя входами (Круглов В.В., Борисов В.В. Искусственные нейронные сети. Теория и практика. - М., Горячая линия-Телеком, 2002).
Блок проверки условия обучения ИНС 4 - вычислитель, реализующий проверку выполнения условия |Xизм i-Хвых|≤EPS (Интегральные микросхемы. Справочник под ред. Б.В. Тарабрина. - М., Радио и связь, 1984.
Ключ 5 - цифровой ключ (Интегральные микросхемы. Справочник под ред. Б.В. Тарабрина. - М., Радио и связь, 1984).
Блок расчета размеров строба 6 - цифровой вычислитель, реализующий операции выбора размеров строба (Кузьмин С.З. Основы теории обработки радиолокационной информации. - М., 1974, стр. 237).
Блок обнаружения объекта в стробе и измерения значения параметра 7 - известные устройства, осуществляющие обнаружение объекта и измерение значения параметров объекта (Кузьмин С.З. Основы теории обработки радиолокационной информации. - М., 1974, стр. 323).
Блок генерации дополнительных случайных значений параметра 8 - цифровой блок осуществляющий генерацию случайной величины в заданном интервале значений (Зубчук В.И. и др. Справочник по цифровой схемотехнике. - К., 1990).
Рассмотрим работу устройства, с помощью которого может быть осуществлен заявляемый способ.
Измеренное в блоке обнаружения объекта в стробе и измерения значения параметра 7 очередное значение Хизм i экстраполируемого параметра траектории поступает на первый вход сдвигового регистра 1 в третью ячейку, сдвигая ранее записанные в сдвиговом регистре 1 значения в следующие ячейки. Этот же сигнал в качестве управляющего поступает на четвертый вход переключателя обучение-экстраполяция 2 и устанавливает его в положение «обучение». В результате в сдвиговом регистре 1 оказываются три последних измеренных значения экстраполируемого параметра Хизм i-2, Хизм i-1 и Хизм i. Значения параметра с выходов 4, 5 и 6 сдвигового регистра 1 подаются на входы блока генерации дополнительных случайных значений параметра 8, где по этим значениям и с учетом известных ошибок измерения параметра определяются интервалы генерируемых дополнительных случайных значений параметра. В этих интервалах и генерируются указанные значения параметра. Сгенерированные таким образом случайные значения параметра с выходов блоков 8 поступают на второй, третий и четвертый входы сдвигового регистра 1 и дополняют соответствующие ячейки сдвигового регистра 1 необходимым количеством (несколько десятков) дополнительных значений параметра. Таким образом формируется обучающая выборка для ИНС 3.
Три указанных измеренных значения параметра (Хизм i-2, Хизм i-1 и Хизм i), дополненные сгенерированными случайными значениями, с первого, второго и третьего выходов сдвигового регистра 1 поступают на соответствующие входы переключателя обучение-экстраполяция 2. Поскольку переключатель обучение-экстраполяция 2 находится в положении «обучение», то значения параметра Хизм i-2, Хизм i-1 с первого и второго его выходов подаются соответственно на первый и второй входы ИНС 3, а значение Xизм i в качестве целевого значения параметра с третьего выхода переключателя 2 поступает на первый вход блока проверки условия обучения ИНС 4.
В ИНС 3 в соответствии со структурой ИНС в течение нескольких итераций, количество которых заранее неизвестно, осуществляется поиск коэффициентов ИНС 3 (обучение ИНС), при которых выходной сигнал ИНС 3 Хвых достигает целевого значения параметра Хизм i с ошибкой, не превышающей заданное допустимое значение EPS. Коррекция коэффициентов ИНС 3 проводится по команде, поступающей на третий вход ИНС 3 с первого выхода блока проверки условия обучения ИНС 4.
В блоке проверки условия обучения ИНС 4 осуществляется сравнение поступающего с выхода ИНС 3 выходного сигнала Хвых с целевым значением параметра Хизм i. При этом, если |Хизм i-Хвых|>EPS, то есть условие обучения ИНС не выполняется, то с первого выхода блока проверки условия обучения ИНС 4 на третий вход ИНС 3 выдается команда на очередную коррекцию коэффициентов.
Если операция поиска коэффициентов ИНС 3 прошла успешно, то есть |Xизм i- Хвых|≤EPS, то считается, что ИНС 3 обучена, и она может использоваться для экстраполяции параметра на следующий обзор. В этом случае со второго выхода блока проверки условия обучения ИНС 4 на пятый вход переключателя обучение-экстраполяция 2 выдается команда, по которой переключатель 2 переводится в положение «экстраполяция», этим же сигналом открывается ключ 5. Сдвиговый регистр 1, в котором записаны значения параметра Xизм i-1 и Хизм i, вторым и третьим выходами подключается соответственно к первому и второму входам ИНС 3. В соответствии со структурой обученной ИНС 3 осуществляется экстраполяция параметра на следующий обзор. При экстраполяции дополнительно сгенерированные значения параметра, записанные в сдвиговом регистре 1 не используются. Экстраполированное значение параметра Хвых с выхода ИНС 3 через открытый ключ 5 поступает на вход блока расчета размеров строба 6, где с учетом известных по предыдущим обращениям к объекту ошибок экстраполяции рассчитываются размеры строба. По этим данным, переданным в блок обнаружения объекта в стробе и измерения значения параметра 7, осуществляется обнаружение объекта и измерение значения параметра, которое с выхода этого блока подается на первый вход сдвигового регистра 1, сдвигая записанные в нем значения в следующие ячейки. Этим же сигналом переключатель обучение-экстраполяция 2 переводится в положение «обучение». Далее работа устройства повторяется.
Таким образом, в описанном устройстве обучающая выборка, сформированная из трех измеренных на обзоре значений Хизм i-2, Хизм i-1 и Хизм i экстраполируемого параметра, дополненных случайными его значениями, сгенерированными в блоках генерации дополнительных случайных значений параметра 8, позволяет осуществить экстраполяцию параметра траектории сопровождаемого объекта на следующий обзор с помощью искусственной нейронной сети с ошибками экстраполяции, не превосходящими допустимые. Таким образом достигается заявленный технический результат.
Изобретение относится к способу экстраполяции параметров траектории сопровождаемого объекта. Технический результат заключается в увеличении пропускной способности радиолокационной станции. Способ, осуществляемый с помощью устройства экстраполяции параметра траектории, выполненного на основе искусственной нейронной сети (ИНС), формирующего на текущем обзоре радиолокационной станции (РЛС) обучающую выборку, в котором определяют соответствующие этой выборке коэффициенты ИНС и осуществляют экстраполяцию параметра на следующий обзор, отличается тем, что обучающую выборку формируют на текущем обзоре РЛС из трех последних измеренных с помощью РЛС значений экстраполируемого параметра, дополняя каждое из них случайными значениями параметра, полученными с помощью генератора дополнительных случайных значений параметра в интервале значений, учитывающих известные ошибки его измерения, при этом экстраполяцию параметра на следующий обзор осуществляют по двум последним измеренным его значениям с помощью ИНС, коэффициенты которой определены в соответствии с упомянутой обучающей выборкой. 1 ил.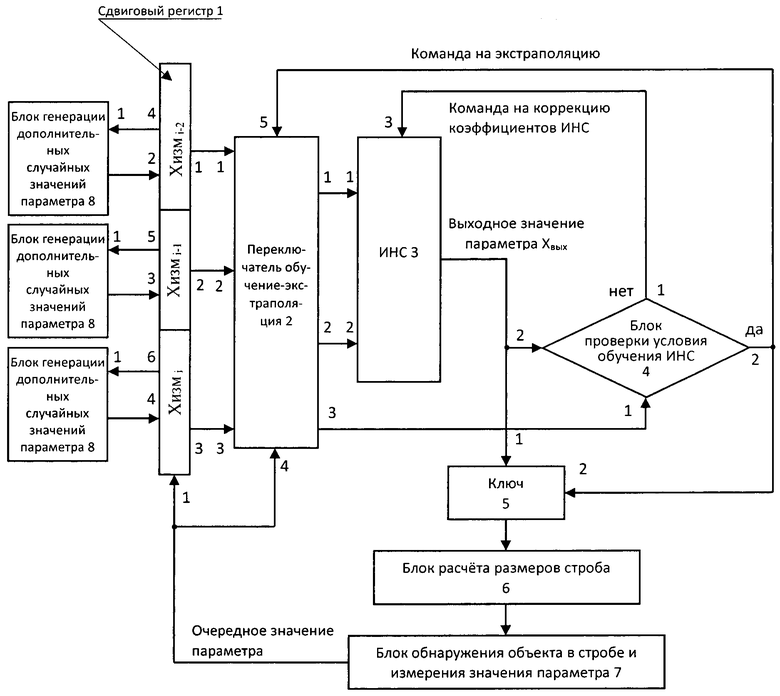
Способ экстраполяции параметров траектории сопровождаемого объекта с помощью устройства экстраполяции параметра траектории, выполненного на основе искусственной нейронной сети (ИНС), формирующего на текущем обзоре радиолокационной станции (РЛС) обучающую выборку, в котором определяют соответствующие этой выборке коэффициенты ИНС и осуществляют экстраполяцию параметра на следующий обзор, отличающийся тем, что обучающую выборку формируют на текущем обзоре РЛС из трех последних измеренных с помощью РЛС значений экстраполируемого параметра, дополняя каждое из них случайными значениями параметра, полученными с помощью генератора дополнительных случайных значений параметра в интервале значений, учитывающих известные ошибки его измерения, при этом экстраполяцию параметра на следующий обзор осуществляют по двум последним измеренным его значениям с помощью ИНС, коэффициенты которой определены в соответствии с упомянутой обучающей выборкой.
| СПОСОБ НЕЙРОСЕТЕВОГО ПРОГНОЗИРОВАНИЯ ИЗМЕНЕНИЯ ЗНАЧЕНИЙ ФУНКЦИИ С ЕЁ ПРЕДВАРИТЕЛЬНОЙ ВЕЙВЛЕТ-ОБРАБОТКОЙ И УСТРОЙСТВО ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2600099C1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| CN 107748942 A, 02.03.2018. | |||

