Область техники
Изобретение относится к области распознавания образов и может быть использовано в системах распознавания космических аппаратов по радиолокационной информации.
Уровень техники
В настоящее время известны способы распознавания космических аппаратов (КА), основанные на аппарате статистической теории распознавания образов и состоящие из двух этапов: обучения и экзамена [Горелик А.Л., Скрипкин В.А. Методы распознавания. - 2-е изд. - М.: Высшая школа, 1984. - 207 с].
На этапе обучения происходит формирование эталонных описаний классов КА, представляющих собой набор векторов отличительных признаков каждого отдельного класса КА. Набор отличительных признаков формируется по результатам анализа радиолокационных сигнатур и изображений (РЛИ) КА разных классов, полученных по результатам натурных измерений [Ладыгин А.И. Анализ сигнатур. Теория и практика радиолокационного распознавания космических объектов &. Космические трагедии глазами аналитиков сигнатур. - М.: Университетская книга, 2008. - 256 с.]. На втором этапе (экзамена) на основе выбранного решающего правила происходит принятие решения о соответствии наблюдаемого КА какому-либо эталонному классу или признание данного КА новым классом [Горелик А.Л., Скрипкин В.А. Методы распознавания. - 2-е изд. - М.: Высшая школа, 1984. - 207 с.].
Недостатком данного способа является необходимость определения информативных (отличительных) признаков каждого класса КА экспертным методом, что делает зависимым качество распознавания от квалификации экспертов.
Известен способ обнаружения и определение координат искомого объекта по радиолокационной информации [Патент РФ №2392635, МПК G01S 5/02 (2010/01), опубликован 20.06.2010]. Данный способ заключается в том, что при зондировании земной поверхности радиолокатором с синтезированной апертурой (РСА) используют М≥2 каналов, работающих в разных частотных диапазонах, определяются с помощью навигационной системы (НС) координаты фазовые центры антенн (ФЦА), после чего они запоминаются. Для первичного обнаружения объекта выбирается канал РСА с наилучшей контрастностью сигнала искомого объекта на фоне местности, далее результаты первичного обнаружения используют в канале с наибольшей несущей частотой для повторного зондирования участка местности с более высоким разрешением. После повторного зондирования происходит различение искомого объекта и определение его координат в экранной системе координат с последующим их пересчетом в геодезические координаты с использованием хранящихся данных о координатах ФЦА. Недостатком известного способа является то, что задача обнаружения и распознавания объекта на радиолокационном изображении (РЛИ) решается с помощью операторов-дешифровщиков и отличается низким быстродействием и ограниченной пропускной способностью, связанной с квалификацией оператора-дешифровальщика.
Также, известен способ распознавания КА по РЛИ [Ладыгин А.И. Основы теории радиолокационного распознавания КО. - М.: МВУРЭ ПВО, 1997. - 234 с.], где в качестве вектора отличительных признаков каждого класса КА используются радиолокационные изображения космических аппаратов данного класса (эталонные РЛИ), полученные по результатам натурных измерений или моделирования при различных ракурсах наблюдения. Решение о принадлежности наблюдаемого КА к какому-либо эталонному классу происходит путем сопоставления полученного РЛИ со всеми эталонными РЛИ с вычислением какого-либо вида меры близости изображений Δεij, где i =1…N - номер эталонного класса, j=1...Mi - номер эталонного изображения в эталонном классе i, N - количество эталонных классов, Mi - количество эталонных изображений в эталонном классе i. По результатам сравнения наблюдаемый КА относят к эталонному классу i, для которого Δεij=min.
Данный способ принят за прототип.
К причинам, препятствующим достижению указанного ниже технического результата при использовании прототипа, относятся следующие недостатки:
- необходимость сравнения зарегистрированного РЛИ КА со всеми эталонными РЛИ, что при большом количестве эталонных КА и эталонных изображений требует большого количества вычислений и значительного времени;
- низкое качество распознавания КА по зашумленным РЛИ.
Сущность изобретения
В основу изобретения положена задача снижения количества вычислений на этапе принятия решения о классе распознаваемого КА за счет замены процедуры сравнения зарегистрированного РЛИ с эталонными РЛИ процедурами редуцирования изображений и параллельных вычислений с использованием предварительно обученной искусственной нейронной сети типа многослойный персептрон (МП).
Поставленная задача достигается тем, что полученное радиолокационное изображение редуцируется путем выделения контура космического аппарата на изображении и инициализации контура значением измеренной эффективной площади (ЭПР) аппарата и подается на вход предварительно обученной редуцированными аналогичным образом эталонными радиолокационными изображениями искусственной нейронной сети, после прохождения которой на выходе трехслойного персептрона возбуждается нейрон, соответствующий номеру класса космических аппаратов, к которому отнесен наблюдаемый аппарат.
Благодаря введению в известный способ совокупности существенных отличительных признаков (проведение процедуры редуцирования и использования в качестве классификатора предварительно обученной искусственной нейронной сети) заявляемый способ позволяет снизить количество вычислений и уменьшить время работы на этапе принятия решений о классе распознаваемого КА.
Процедура редуцирования РЛИ КА позволяет уменьшить объем искусственной нейронной сети почти в два раза и увеличить скорость обучения в пять раз. Редуцирование изображений позволяет уменьшить степень взаимокорреляции сходных по форме и размерам изображений. Вероятность правильной классификации КА по сильно зашумленным (отношение сигнал/шум 8-10 дБ) изображениям после проведения процедуры редуцирования увеличивается на 3-25%, а вероятность ошибки снижается на 37%.
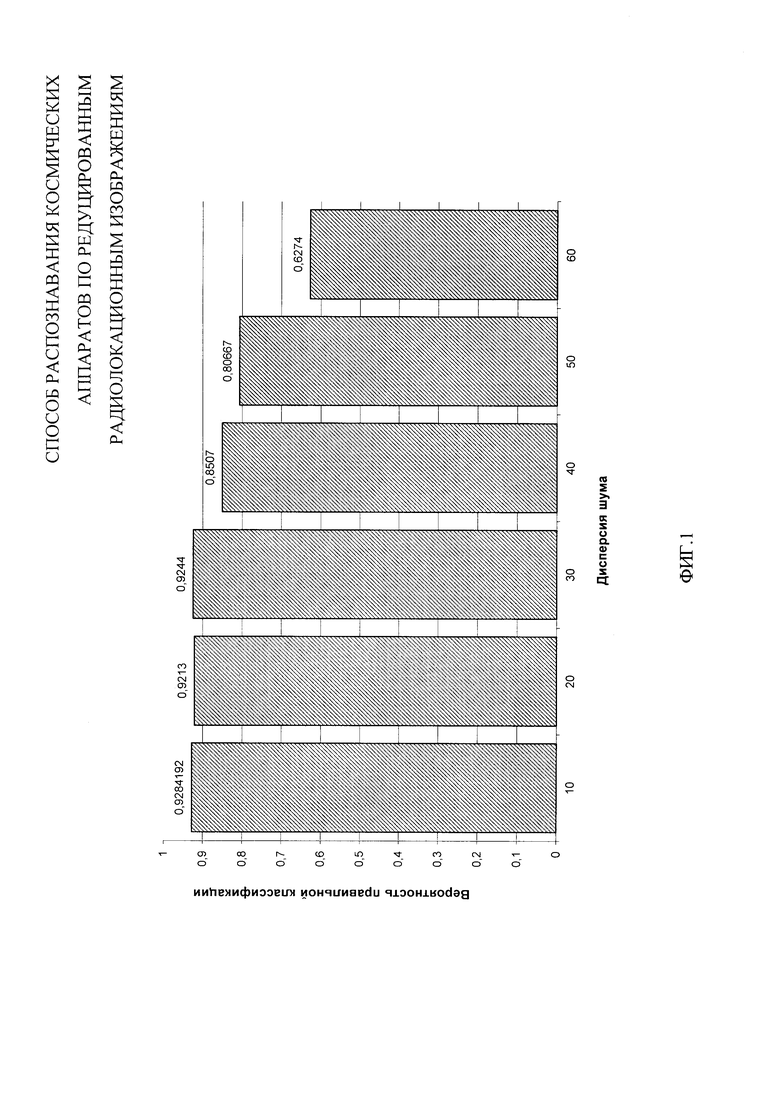
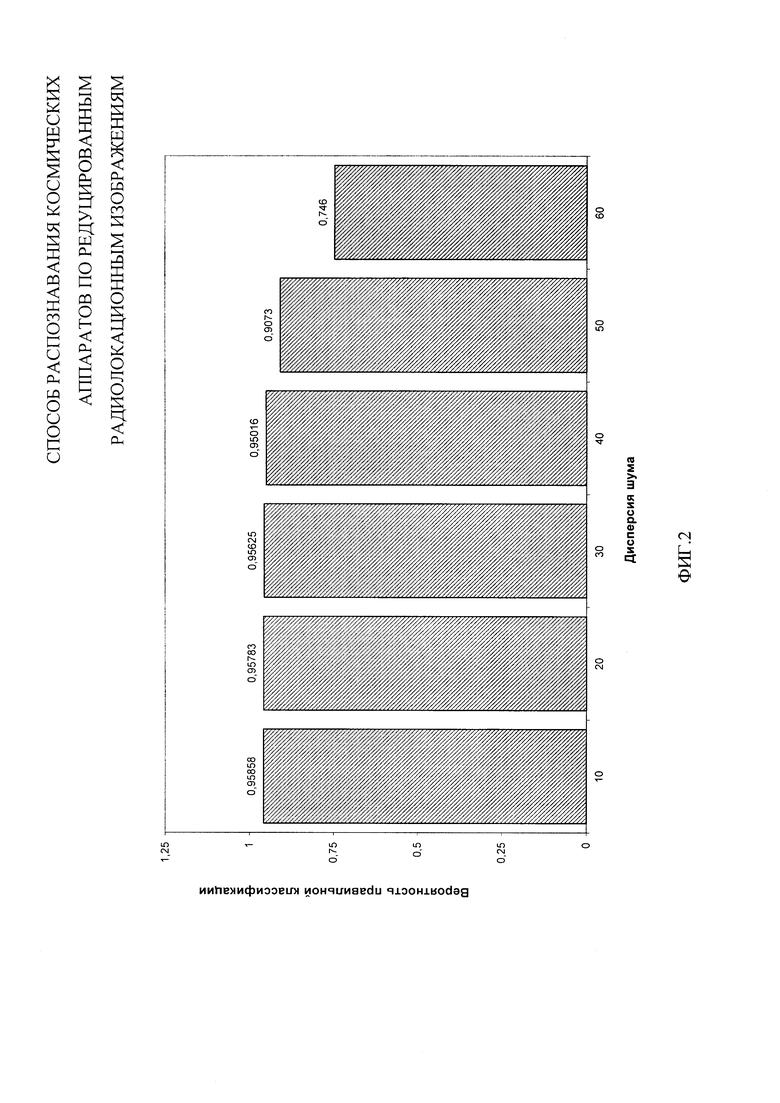
Эффективность предложенного изобретения оценивалась с использованием моделирования. Смоделированные РЛИ КА трех известных классов были подвергнуты фазовым искажениям и зашумлены аддитивным гауссовым шумом. Данные РЛИ были классифицированы ИНС, обученной не редуцированными не зашумленными изображениями данных эталонных классов. Полученные результаты представлены на Фиг. 1. Вероятность правильной классификации КА по зашумленному РЛИ изменяется в диапазоне 0.92-0.6 в зависимости от зашумленности изображения. Эти же изображения были подвергнуты редуцированию. После редуцирования изображения были классифицированы ИНС, обученной редуцированными незашумленными изображениями эталонных классов. Результаты классификации представлены на Фиг. 2. Вероятность правильной классификации КА по редуцированному зашумленному РЛИ изменяется в диапазоне 0.95-0.75 в зависимости от зашумленности изображения.
Перечень фигур
Способ поясняется чертежами, на которых
На фиг. 1 представлена диаграмма зависимости вероятности правильной классификации космических аппаратов по нередуцированным зашумленным радиолокационным изображениям.
На фиг. 2 представлена диаграмма зависимости вероятности правильной классификации космических аппаратов по редуцированным, в соответствии с предложенным способом, зашумленным радиолокационным изображениям.
Осуществление изобретения
Способ распознавания космических аппаратов по редуцированным радиолокационным изображениям заключается в последовательном выполнении следующих действий:
1. Производится формирование обучающей выборки путем получения по результатам натурных наблюдений радиолокационной станцией или моделирования радиолокационных изображений космических аппаратов известных классов. Полученная обучающая выборка РЛИ записывается в цифровом виде в память цифрового сигнального процессора, где каждое РЛИ представляет собой двумерный массив значений I(j,k) (j=1…Ν, k=1…Ν,Ν - размер массива).
2. Производится редуцирование обучающей выборки с использованием специальных программных средств путем выполнения следующих действий:
2.1 Подчеркивание границ КА (выделение контура) на изображении в соответствии с выражением:

где I - яркость пикселя РЛИ, j, k - номер пикселя в кадре по горизонтали и вертикали соответственно.
2.2 Проводится инициализация контура объекта на изображении значением нормированной ЭПР КА.
3. Производится построение (обучение) классификатора на основе трехслойного персептрона с использованием эталонных редуцированных радиолокационных изображений космических аппаратов известных классов, построчно развернутых в одномерный сигнал, методом обратного распространения ошибки. Количество нейронов выходного слоя ИНС соответствует количеству классов КА.
4. Проводится измерение радиолокационного изображения неизвестного КА с использованием РЛС и его редуцирование в соответствии с подшагами 2.1 и 2.2.
5. Редуцированное РЛИ неизвестного КА с использованием специальной программы построчно разворачивается в одномерный сигнал и подается на вход обученного классификатора на основе трехслойного персептрона, после прохождения которого, на его выходе возбуждается нейрон, соответствующий номеру известного класса КА, к которому отнесен наблюдаемый КА.
Для распознавания следующего неизвестного КА происходит возврат к шагу 4 данного способа.
Радиолокационные изображения обрабатываются и хранятся в памяти цифрового сигнального процессора.
Способ позволяет решать задачу распознавания КА по радиолокационным изображениям с вероятностью правильной классификации 0.95-0.75, в том числе по сильно зашумленным (отношение сигнал/шум 8-10 дБ) изображениям.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ СВЕРТОЧНЫМИ НЕЙРОННЫМИ СЕТЯМИ | 2020 |
|
RU2771442C1 |
| СПОСОБ РАСПОЗНАВАНИЯ НАДВОДНЫХ КОРАБЛЕЙ НА ВЗВОЛНОВАННОЙ МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2423722C1 |
| Система оперативной идентификации морских целей по их информационным полям на базе нейро-нечетких моделей | 2021 |
|
RU2763384C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476825C2 |
| Система обнаружения и классификации морских целей с использованием математической модели определения типа цели | 2020 |
|
RU2726992C1 |
| Способ распознавания и классификации объектов на изображении | 2024 |
|
RU2836156C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ НА ИЗОБРАЖЕНИЯХ, ПОЛУЧЕННЫХ РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ | 2018 |
|
RU2698649C1 |
| Способ быстрого имитирования радиолокационных изображений | 2024 |
|
RU2835989C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПЕРЕСТРОЙКОЙ ЧАСТОТЫ, ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ ПО СОВОКУПНОСТИ ПРИЗНАКОВ | 2009 |
|
RU2412451C1 |
| Способ обнаружения и классификации морских целей с использованием математической модели определения типа цели | 2020 |
|
RU2724990C1 |
Изобретение относится к области распознавания образов и может быть использовано в системах распознавания космических аппаратов по радиолокационной информации. Технический результат - снижение количества вычислений на этапе принятия решения о классе космического аппарата и повышение вероятности правильной классификации космических аппаратов по сильно зашумленным изображениям после проведения процедуры редуцирования. Способ распознавания космических аппаратов по редуцированным радиолокационным изображениям, заключающийся в получении радиолокационного изображения космического аппарата, при этом полученное радиолокационное изображение редуцируется путем выделения контура космического аппарата на изображении и инициализации контура значением измеренной эффективной площади рассеяния аппарата и подается на вход предварительно обученного редуцированными аналогичным образом эталонными радиолокационными изображениями известных классов космических аппаратов трехслойного персептрона, в результате чего на выходе трехслойного персептрона возбуждается нейрон, соответствующий номеру класса космических аппаратов, к которому отнесен наблюдаемый аппарат. 2 ил.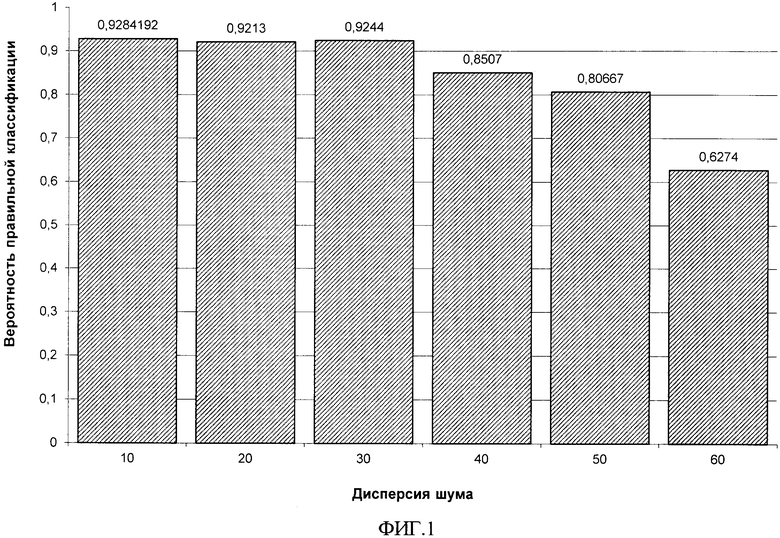
Способ распознавания космических аппаратов по редуцированным радиолокационным изображениям, заключающийся в получении радиолокационного изображения космического аппарата, отличающийся тем, что полученное радиолокационное изображение редуцируется путем выделения контура космического аппарата на изображении и инициализации контура значением измеренной эффективной площади рассеяния аппарата и подается на вход предварительно обученного редуцированными аналогичным образом эталонными радиолокационными изображениями известных классов космических аппаратов трехслойного персептрона, в результате чего на выходе трехслойного персептрона возбуждается нейрон, соответствующий номеру класса космических аппаратов, к которому отнесен наблюдаемый аппарат.
| Электропешня | 1946 |
|
SU82045A1 |
| Способ факельно-слоевого сжигания кускового топлива в топках паровых котлов | 1949 |
|
SU91185A1 |
| CПОСОБ АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ОБЪЕКТОВ НА ИЗОБРАЖЕНИИ | 2013 |
|
RU2528140C1 |
| СПОСОБ РАСПОЗНАВАНИЯ НАДВОДНЫХ КОРАБЛЕЙ НА ВЗВОЛНОВАННОЙ МОРСКОЙ ПОВЕРХНОСТИ | 2010 |
|
RU2423722C1 |
| US 8144931 B1, 27.03.2012 | |||
| CN 102663437 A, 12.09.2012. | |||

