Изобретение относится к радиолокации и может быть использовано в автоматизированных системах управления, передачи и обмена радиолокационной информацией (РЛИ), в автоматизированных радиолокационных системах (РЛС).
Известно устройство ["Справочник по радиолокации", М. Сколник, М., "Советское радио", 1976 г., том 1, стр. 191], содержащее последовательно соединенные высокочастотную часть приемника РЛС, детектор, аналого-цифровой преобразователь (АЦП), входное запоминающее устройство (ЗУ) со счетчиками адреса записи и чтения, блок выдачи и выход устройства с индикатором на выходе, а также блок формирования азимута, вход которого связан с антенным сельсином, а выход которого связан со вторым входом блока выдачи и, кроме того, пульт оператора и регистр порога, вход которого связан с первым выходом пульта оператора, а выход которого связан с первым входом компаратора, выход превышения порога которого связан со входом разрешения блока выдачи. Недостатком этого устройства является низкая эффективность отсева ложной первичной РЛИ.
Наиболее близким к заявляемому изобретению является "Способ третичной обработки радиолокационной информации в вычислительной системе пункта управления" [RU №2561950 C1, G01S 13/91, 10.09.2015], включающий прием сообщений по воздушным объектам (ВО) от источников РЛИ, приведение этих сообщений к единому моменту времени и в единую систему координат, отождествление поступивших от источников сообщений с целью формирования обобщенной картины воздушной обстановки и передачи ее потребителям, отличающийся тем, что решение на отождествление сообщений принимают при попадании в стробы отождествления величин среднеквадратичных отклонений координатных составляющих сообщения по ВО от источника и объединенной траектории за несколько циклов обмена, разотождествление сообщений производят, если величина среднеквадратичного отклонения хотя бы по одной из координат превышает величину, равную суммарной величине строба отождествления и зоны неоднозначности, величина которой определяется динамическими ошибками систем стабилизации и навигации источника РЛИ, с возможностью распознавания ложной информации при поступлении РЛИ от двух и более источников с одинаковыми техническими характеристиками путем проведения при поступлении сообщения по новому ВО от одного из источников анализа возможности попадания нового ВО в зоны видимости других источников и установлением времени ожидания поступления информации по этому ВО от других источников, если в течение времени ожидания информация от других источников не поступила, а информация по этому ВО от первого источника перестала приходить, делают вывод о ложности информации по данному ВО в сообщениях первого источника. Недостатком этого способа является отсутствие возможности адаптация РЛС к окружающей среде с целью максимальной информативности радарной сцены (PC), в зависимости от решаемой оператором РЛС задачи.
Техническим результатом изобретения является расширение функциональных возможностей РЛС за счет обеспечения ее адаптации к окружающей среде с целью максимальной информативности радарной сцены, в зависимости от решаемой оператором РЛС задачи.
Технический результат достигается тем, что способ когнитивной обработки радиолокационной информации, включающий прием сообщений и формирование обобщенной картины воздушной обстановки, отличается тем, что после получения информации оператор РЛС принимает решение о наличии в определенной области пространства интересующего его ВО и берет эту область пространства на сопровождение, после чего включается система автоматической радиолокационной прокладки траектории (САРПТ), после ее включения выбранной области присваивается номер и статус ("захват"), затем когнитивный анализатор (КА) формирует PC, на которой указываются все области пространства, в которых предположительно будут находиться сопровождаемые и новые ВО, каждому новому объекту на каждом последующем обзоре назначается новый сигнал до тех пор, пока все сигналы библиотеки не будут использованы, после использования всех сигналов формируется статистический формуляр области или объекта, в которых указываются данные о характеристиках отражения конкретного объекта при зондировании конкретным сигналом, после окончания перебора всех сигналов из библиотеки производится выбор оптимального сигнала по критерию максимальной амплитуды отклика и осуществляется его сопровождение с последовательным формированием PC для следующего обзора или для передачи команды на антенный пост.
Способ когнитивной обработки радиолокационной информации содержит следующие действия.
После получения РЛИ от различных источников априорной информации оператор РЛС принимает решение о наличии в определенной области пространства интересующего его ВО и берет эту область пространства на сопровождение, включается САРПТ, после ее включения выбранной области присваивается номер и статус ("захват"), затем КА формирует PC, на которой указываются все области пространства, в которых предположительно будут находиться сопровождаемые и новые ВО, каждому новому ВО на каждом последующем обзоре назначается новый сигнал до тех пор, пока все сигналы библиотеки не будут использованы, после использования всех сигналов формируется статистический формуляр области или объекта, в которых указываются данные о характеристиках отражения конкретного ВО при зондировании конкретным сигналом, после окончания перебора всех сигналов из библиотеки производится выбор оптимального сигнала по критерию максимальной амплитуды отклика и осуществляется его сопровождение с последовательным формированием PC для следующего обзора или для передачи команды на антенный пост.
В последние годы когнитивные исследования начинают переориентироваться на более глубокий учет особенностей человеческой деятельности. В частности, в фундамент новейших исследований природы обработки человеком информации заложены представления о том, что когнитивные модели должны учитывать неаналитические методы обработки образной информации. Говоря о когнитивных моделях, нельзя не затронуть когнитивную компьютерную графику (ККГ) - новое направление в области искусственного интеллекта - и вопросы ее применения в интеллектуальных системах обработки РЛИ.
Суть концепции ККГ проста: если на экране дисплея удается визуализировать существенные свойства и отношения между объектами некоторой предметной области (даже любой степени абстракции), то такой образ ККГ, как правило, содержит в себе информацию (на уровне графических деталей компьютерного изображения) о возможных и не всегда заранее известных следствиях этих свойств и этих отношений. Другими словами, при определенных условиях такие изображения ККГ часто становятся эффективным источником различных подсказок, помогающих увидеть новые закономерности в изучаемой предметной области. Все это в полной мере относится и к деятельности оператора РЛС при когнитивной обработке РЛИ.
Сущность способа когнитивной обработки радиолокационной информации заключается в следующем.
Используя априорную информацию от автоматизированной идентификационная системы (АИС), электронной навигационной карты (ЭНК), либо наблюдая отметки на экране навигационной радиолокационной станция (НРЛС) оператор принимает решение о наличии в определенной области пространства интересующего его объекта (судно, буй и т.д.). Используя органы управления НРЛС, оператор берет эту область пространства на сопровождение и начинает работать САРПТ.
Используя информацию от САРПТ, выбранная область обрабатывается с помощью КА. Области присваивается номер, соответствующий номеру объекта сопровождения, и статус ("захват"). Объекты с таким статусом подлежат сканированию всеми сигналами, которые находятся в библиотеке сигналов.
КА формирует PC, на которой указываются все области пространства, в которых предположительно будут находиться сопровождаемые и новые ВО. Сопровождаемые объекты имеют статус ("сопровождение"), для них зондирующий сигнал был выбран на предыдущих циклах работы КА. По новым объектам на каждом последующем обзоре назначается новый сигнал до тех пор, пока все сигналы библиотеки не будут использованы.
После каждого зондирования нового ВО новым сигналом, формируется статистический формуляр области объекта, в котором указываются данные о характеристиках отражения конкретного ВО при зондировании конкретным сигналом.
По окончании перебора всех сигналов из библиотеки, в случае принятия САРПТ решения о наличии объекта в данной области пространства, происходит выбор сигнала путем сравнения со статистическим формуляром области, зондирование которым обеспечивает лучшее сопровождение объекта и объекту присваивается статус ("сопровождение").
В каждом цикле КА формирует PC, где каждой интересующей области пространства присваивается номер сигнала, которым необходим эту область просканировать. На Фиг. 1 представлена схема PC.
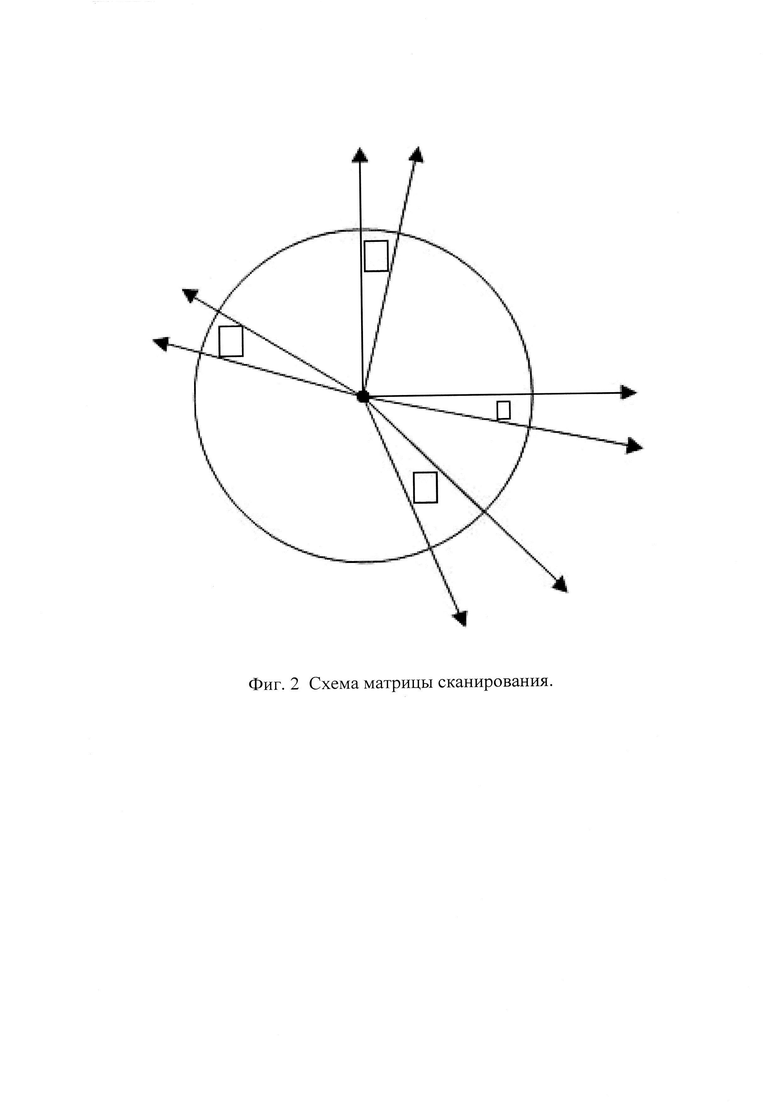
На основе PC формируется матрица сканирования (МС). На Фиг. 2 представлена схема МС.
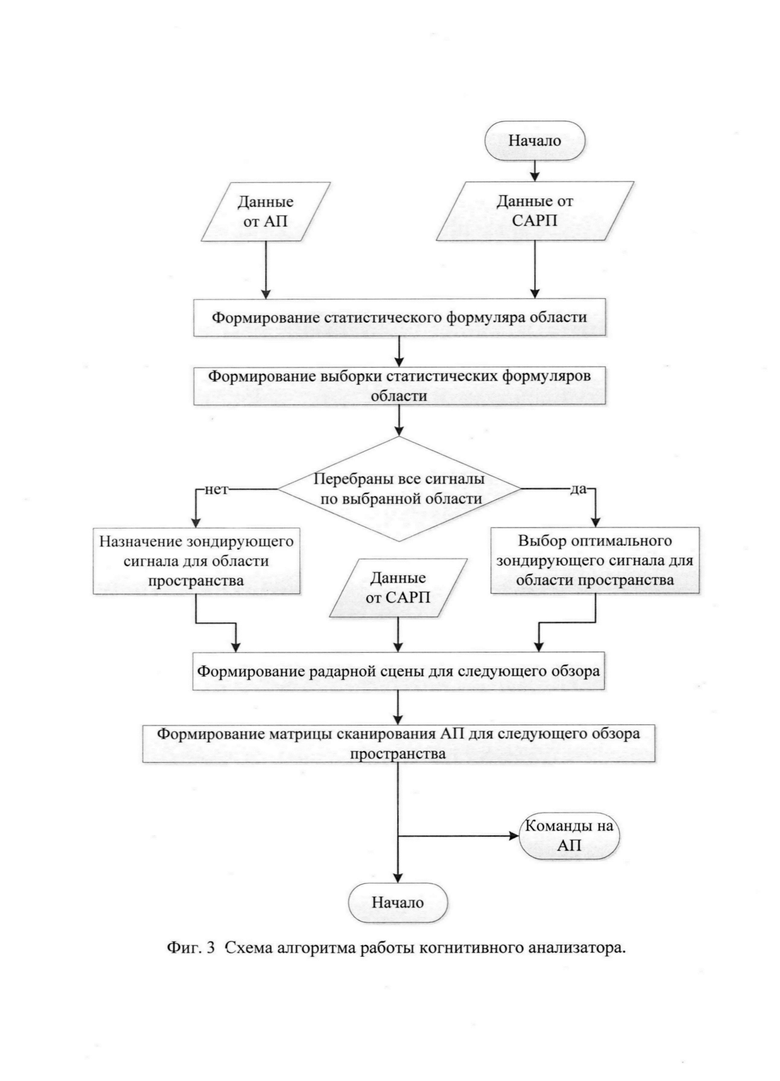
На Фиг. 3 представлена схема алгоритма работы когнитивного анализатора.
На Фиг. 4 представлена схема алгоритма формирования выборки статистических формуляров.
Работа РЛС с элементами когнитивной адаптации заключается в следующем.
Судовая РЛС с элементами когнитивной адаптации представляет собой автоматизированную РЛС, взаимодействующую с окружающей средой посредством электромагнитного поля, параметры которого адаптируются к окружающей среде в зависимости от целевой функции наблюдения с участием оператора РЛС. Возможность судовой РЛС к когнитивной адаптации обеспечивается новыми свойствами разрабатываемого антенного поста.
Выбор оптимального зондирующего сигнала осуществляется путем статистического анализа обучающей выборки последовательности сигналов с выхода приемника РЛС. Обучающая выборка формируется путем зондирования окружающей среды тестовыми сигналами, библиотека которых хранится в памяти пульта управления.
Возможность оператора наблюдать на индикаторном устройстве пульта управления РЛС другие суда, береговую черту, буи, надводные объекты и препятствия, зависит от отражающей способности этих объектов, расстояния до них, уровня помех и затухания зондирующего сигнала в пространстве.
Оператор обычной судовой РЛС (не содержащей элементов когнитивной адаптации) познает окружающую среду посредством ручных регулировок РЛС, добиваясь максимальной информативности радиолокационного изображения на индикаторном устройстве РЛС. Используя свой опыт, навыки и знания об окружающей среде, оператор периодически меняет режимы работы РЛС и анализирует информативность индикаторного устройства РЛС.
Когнитивный цикл познания окружающей среды в полностью замкнут на оператора, а сама РЛС является лишь его инструментом познания окружающей среды. Оператор РЛС повторяет когнитивный цикл до тех пор, пока качество наблюдаемой информации на индикаторном устройстве РЛС не будет удовлетворять его требованиям. КА осуществляет выбор оптимального зондирующего сигнала по максимальному уровню отношения сигнал/помеха на выходе приемника РЛС, полученного в результате статистической обработки обучающей выборки в соответствии с задачей, определенной оператором РЛС для КА. Адаптация РЛС к окружающей среде осуществляется с целью максимальной информативности PC, в зависимости от решаемой оператором РЛС задачи. С целью уменьшения количества циклов КА, оператор РЛС может конкретизировать задачу, решаемую КА, например, не только адаптировать РЛС для оптимального наблюдения другого судна (береговой черты, буя, навигационного ограждения), но и указать вероятное местоположение цели, полученное от внешних источников. По существу, КА пульта оператора РЛС является помощником оператора РЛС в ее адаптации к окружающей среде в зависимости от целевой функции наблюдения.
Таким образом, способ когнитивной обработки радиолокационной информации обеспечивает расширение функциональных возможностей РЛС за счет обеспечения ее адаптации к окружающей среде с целью максимальной информативности PC, в зависимости от решаемой оператором РЛС задачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННЫХ ИЗОБРАЖЕНИЙ В РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ С ПРЕДВАРИТЕЛЬНОЙ ФОКУСИРОВКОЙ И УСТРОЙСТВО ЕГО РЕАЛИЗУЮЩЕЕ | 2021 |
|
RU2792964C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА С ПРОГНОЗОМ ПРОПАДАНИЯ ЦЕЛЕЙ В ЗОНАХ ДОПЛЕРОВСКОЙ РЕЗЕКЦИИ | 2009 |
|
RU2408030C2 |
| СПОСОБ АДАПТИВНОГО ОБЗОРА ЗОНЫ ДЕЙСТВИЯ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ | 2018 |
|
RU2701377C1 |
| СПОСОБ ЗАЩИТЫ ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ В ВИДЕ СКОПЛЕНИЙ ОБНАРУЖЕННЫХ СИГНАЛОВ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2536182C2 |
| Радиолокационная станция обнаружения малоразмерных целей | 2020 |
|
RU2744210C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ВЫЯВЛЕНИЯ КОМПАКТНЫХ ГРУПП ВЗАИМОДЕЙСТВУЮЩИХ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2558674C1 |
| МОДУЛЬ ПЛАНИРОВАНИЯ | 2009 |
|
RU2415456C1 |
| Радиолокационный комплекс раннего обнаружения нарушителей для охраны объекта | 2018 |
|
RU2695412C1 |
| Способ построения радиолокационного изображения с помощью радиолокационной станции с синтезированной апертурой | 2017 |
|
RU2661941C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |


Изобретение относится к области радиолокации и может быть использовано в автоматизированных системах управления, передачи и обмена информации, в автоматизированных радиолокационных системах. Техническим результатом является расширение функциональных возможностей радиолокационных систем за счет обеспечения адаптации к окружающей среде с целью максимальной информативности радарной сцены. Для этого способ когнитивной обработки радиолокационной информации содержит следующие действия. После получения радиолокационной информации от различных источников априорной информации оператор принимает решение о наличии в определенной области пространства интересующего его объекта и берет эту область пространства на сопровождение, включается система автоматической радиолокационной прокладки траектории, после ее включения выбранной области присваивается номер и статус, затем когнитивный анализатор формирует радарную сцену, на которой указываются все области пространства, в которых предположительно будут находиться сопровождаемые и новые объекты, каждому новому объекту на каждом последующем обзоре назначается новый сигнал до тех пор, пока все сигналы библиотеки не будут использованы, после использования всех сигналов формируется статистический формуляр области или объекта, в которых указываются данные о характеристиках отражения конкретного объекта при зондировании конкретным сигналом, после окончания перебора всех сигналов из библиотеки производится выбор оптимального сигнала по критерию максимальной амплитуды отклика и осуществляется его сопровождение с последовательным формированием радарной сцены для следующего обзора или для передачи команды на антенный пост. 4 ил.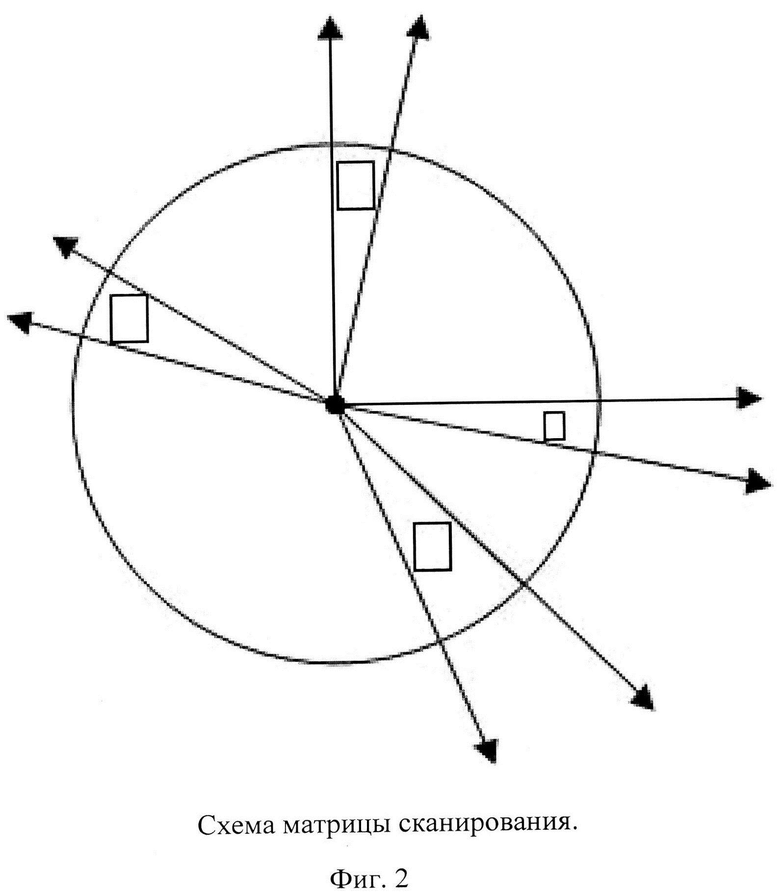
Способ когнитивной обработки радиолокационной информации, включающий прием сообщений и формирование обобщенной картины обстановки, отличающийся тем, что после получения информации оператор принимает решение о наличии в определенной области пространства интересующего его объекта и берет эту область пространства на сопровождение, включается система автоматической радиолокационной прокладки траектории, после ее включения выбранной области присваивается номер и статус, затем когнитивный анализатор формирует радарную сцену, на которой указываются все области пространства, в которых предположительно будут находиться сопровождаемые и новые объекты, каждому новому объекту на каждом последующем обзоре назначается новый сигнал до тех пор, пока все сигналы библиотеки не будут использованы, после использования всех сигналов формируется статистический формуляр области или объекта, в котором указываются данные о характеристиках отражения конкретного объекта при зондировании конкретным сигналом, после окончания перебора всех сигналов из библиотеки производится выбор оптимального сигнала по критерию максимальной амплитуды отклика и осуществляется его сопровождение с последовательным формированием радарной сцены для следующего обзора или для передачи команды на антенный пост.
| СПОСОБ ТРЕТИЧНОЙ ОБРАБОТКИ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ В ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЕ ПУНКТА УПРАВЛЕНИЯ | 2014 |
|
RU2561950C1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| СПОСОБ ПОСЛЕДОВАТЕЛЬНОГО ОПРЕДЕЛЕНИЯ УСРЕДНЕННЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ МАТЕРИАЛЬНЫХ ОБЪЕКТОВ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ | 2017 |
|
RU2651342C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| CN 106257302 A, 28.12.2016 | |||
| CN 107167798 A, 15.09.2017. | |||

