ОБЛАСТЬ ТЕХНИКИ
Техническое решение предназначено для повышения эффективности управления железнодорожным подвижным составом: за счет увеличения точности торможения и повышения безопасности при движении подвижного состава.
УРОВЕНЬ ТЕХНИКИ
На подвижном составе железных дорог РФ применяется пять типов тормозов:
1. Стояночные (ручные) – ими оборудованы локомотивы, пассажирские вагоны и около 15% грузовых вагонов;
2. Пневматические – ими оснащен весь подвижной состав с использованием сжатого воздуха;
3. Электропневматические – ими оборудованы пассажирские локомотивы и вагоны, электропоезда и дизельные поезда;
4. Электрические (динамические или реверсивные) – ими оборудованы отдельные серии локомотивов и электропоездов;
5. Магнитно-рельсовые – ими оборудованы высокоскоростные поезда. Применяются как дополнительные к ЭПТ и электрическим.
Стояночные, пневматические и электропневматические тормоза относятся к разряду фрикционных тормозов, у которых сила трения создается непосредственно на поверхности колеса либо на специальных дисках, жестко связанных с колесными парами.
Основным тормозом на подвижном составе является пневматический.
Пневматические тормоза имеют однопроводную магистраль (воздухопровод), проложенную вдоль каждого локомотива и вагона для дистанционного управления воздухораспределителями с целью зарядки запасных резервуаров, наполнения тормозных цилиндров сжатым воздухом при торможении и сообщения их с атмосферой при отпуске.
Применяемые на подвижном составе пневматические тормоза разделяются на автоматические и неавтоматические, а также на пассажирские (с быстрыми тормозными процессами) на грузовые (с замедленными процессами).
Автоматическими называются тормоза, которые при разрыве поезда или тормозной магистрали, а также при открытии стоп-крана из любого вагона автоматически приходят в действие вследствие снижения давления воздуха в магистрали (при повышении давления происходит отпуск тормозов).
Неавтоматические тормоза, наоборот, приходят в действие при повышении давления в трубопроводе, а при выпуске воздуха происходит отпуск тормоза.
Работа автоматических тормозов разделяется на следующие процессы:
зарядка – воздухопровод (магистраль) и запасный резервуар под каждой единицей подвижного состава заполняются сжатым воздухом;
торможение – производится снижением давления воздуха в магистрали вагона или всего поезда для приведения в действие воздухораспределителя и воздух из запасного резервуара поступает в тормозной цилиндр, где энергия сжатого воздуха преобразуется в механическую, приводя в действие тормозную рычажную передачу, которая прижимает колодки к колесам;
перекрыша – после произведенного торможения давление в магистрали и тормозном цилиндре не изменяется; отпуск – давление в магистрали повышается, вследствие чего воздухораспределитель выпускает воздух из тормозных цилиндров в атмосферу, одновременно производится подзарядка запасного резервуара путем сообщения его с тормозной магистралью.
Из уровня техники известно RU 2283786, УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА, опубликовано 20.09.2006, Общество с ограниченной ответственностью "Научно-производственное объединение САУТ" (RU),
Открытое акционерное общество "Российские железные дороги" (RU).
Техническое решение относится к области железнодорожного транспорта, в частности к устройствам для автоматического управления торможением подвижных составов. Устройство содержит расположенную в начале каждого блок-участка пути передающую антенну, соединенную с генератором, и расположенные на локомотиве приемную антенну, соединенную с блоком приема информации, датчик угла поворота, установленный на буксе колеса и соединенный с входами измерителя пути и измерителя скорости, измеритель эффективности тормозов, блок программной скорости, трехпозиционный релейный элемент. Измеритель эффективности тормозов подключен к выходам измерителя ускорения и датчика давления в тормозной магистрали. Один вход блока программной скорости соединен с выходом измерителя пути, второй вход - с выходом блока приема информации, третий вход - с выходом блока автоматической локомотивной сигнализации, четвертый вход - с выходом измерителя эффективности тормозов. Трехпозиционный релейный элемент подключен к вентилям торможения и отпуска тормозной системы поезда. Устройство снабжено блоком постоянно запоминающего устройства, формирователем границ блок-участков пути и измерителем диаметра бандажа колесной пары. Один вход измерителя диаметра бандажа колесной пары соединен с выходом датчика, второй вход - со вторым выходом блока приема информации, третий вход - с первым выходом блока постоянно запоминающего устройства, а выходы его подключены к входам измерителя пути и измерителя скорости. Второй выход блока постоянно запоминающего устройства соединен с входом измерителя эффективности тормозов, третий выход - с пятым входом блока программной скорости, а каждый из двух его входов соединен соответственно с третьим выходом блока приема информации и выходом формирователя границ блок-участков пути. Вход формирователя границ блок-участков пути связан с выходом блока автоматической локомотивной сигнализации.
Данное техническое решение взято в качестве прототипа.
СУЩНОСТЬ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Данное техническое решение направлено на устранение недостатков, присущих существующим аналогам.
Технический результат от использования данного технического решения заключается в повышении точности регулирования скорости и остановки подвижного состава.
Данный технический результат достигается за счет уточнения параметров зависимости коэффициента трения колодки о бандаж от скорости и времен, в течение которого тормозная сила набирает максимальное значение и в течение которого происходит отпуск пневматических тормозов и, как следствие, более эффективного и точного определения координаты пути и скорости подвижного состава при нахождении в ней, в которой необходимо начать пневматическое торможение и координаты пути и скорости подвижного состава при нахождении в ней, в которой необходимо начать отпуск пневматических тормозов.
В одном из предпочтительных вариантов реализации предложен способ управления пневматическими тормозами железнодорожного подвижного состава, характеризующийся тем, что: определяют координату пути, по достижении которой необходимо снизить скорость железнодорожного подвижного состава; определяют скорость железнодорожного подвижного состава, которая должна быть в определенной ранее координате пути; определяют параметры зависимости коэффициента трения колодки о бандаж от программной скорости; определяют тормозной коэффициент; определяют время, в течение которого тормозная сила набирает максимальное значение; определяют время, в течение которого происходит отпуск пневматических тормозов; определяют координату пути, в которой необходимо начать пневматическое торможение, и координату пути, в которой необходимо начать отпуск пневматических тормозов; при достижении координаты пути, в которой необходимо начать торможение в систему управления железнодорожного подвижного состава передают команду на начало торможения; при достижении координаты пути, в которой необходимо начать отпуск пневматических тормозов передают в систему управления железнодорожного подвижного состава команду на отпуск пневматических тормозов.
Координату пути, по достижении которой необходимо снизить скорость железнодорожного подвижного состава, могут получать из системы машинного зрения.
Координату пути, по достижении которой необходимо снизить скорость железнодорожного подвижного состава, могут получать по радиоканалу.
Координату пути и скорость, до которой необходимо затормозить, могут получать из системы автоведения.
Данное техническое решение может быть выполнено в виде системы управления пневматическими тормозами железнодорожного подвижного состава, содержащую: по крайней мере, одно устройство обработки команд; по крайней мере, одно устройство хранения данных; одну или более компьютерных программ, загружаемых в, по крайней мере, одно вышеупомянутое устройство хранения данных и выполняемых на, по крайне мере, одном из вышеупомянутых устройств обработки команд, при этом одна или более компьютерных программ содержат следующие инструкции: определяют координату пути, по достижении которой необходимо снизить скорость железнодорожного подвижного состава; определяют скорость железнодорожного подвижного состава, которая должна быть в определенной ранее координате пути; определяют параметры зависимости коэффициента трения колодки о бандаж от программной скорости; определяют тормозной коэффициент; определяют время, в течение которого тормозная сила набирает максимальное значение; определяют время, в течение которого происходит отпуск пневматических тормозов; определяют координату пути, в которой необходимо начать пневматическое торможение, и координату пути, в которой необходимо начать отпуск пневматических тормозов; при достижении координаты пути, в которой необходимо начать торможение в систему управления железнодорожного подвижного состава передают команду на начало торможения; при достижении координаты пути, в которой необходимо начать отпуск пневматических тормозов передают в систему управления железнодорожного подвижного состава команду на отпуск пневматических тормозов.
Координату пути, по достижении которой необходимо снизить скорость железнодорожного подвижного состава, могут получать из системы машинного зрения.
Координату пути, по достижении которой необходимо снизить скорость железнодорожного подвижного состава, могут получать по радиоканалу.
Координату пути и скорость, до которой необходимо затормозить, могут получать из системы автоведения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 – график зависимости тормозного коэффициента от времени;
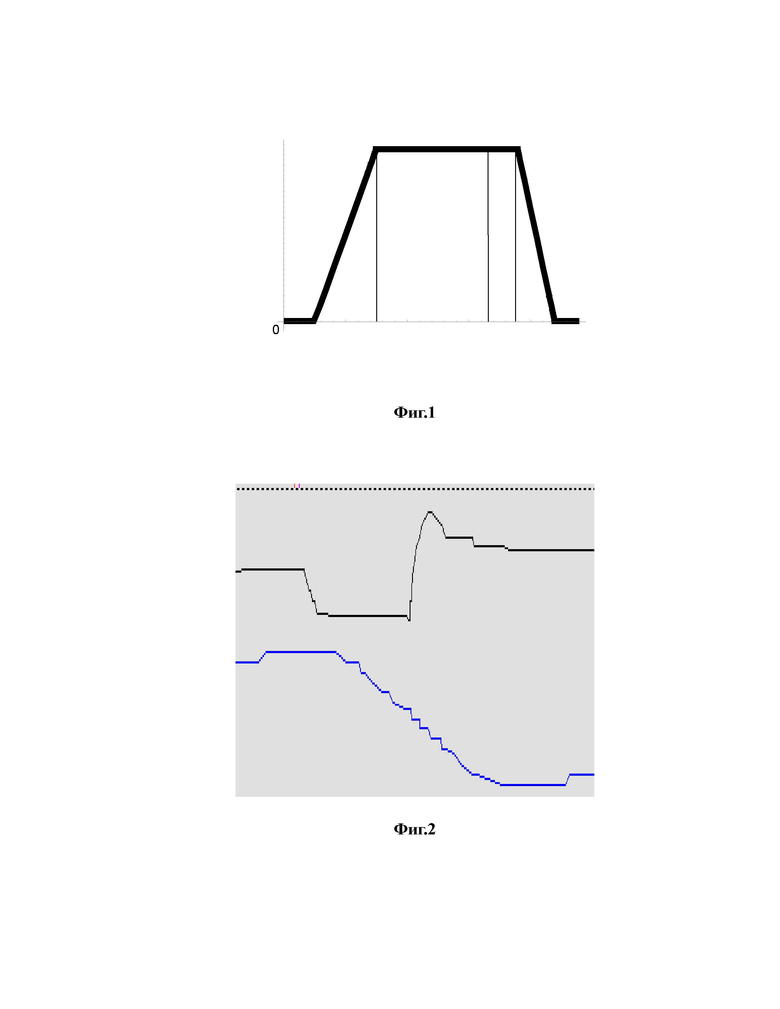
Фиг.2 – пример графика пневматического торможения;
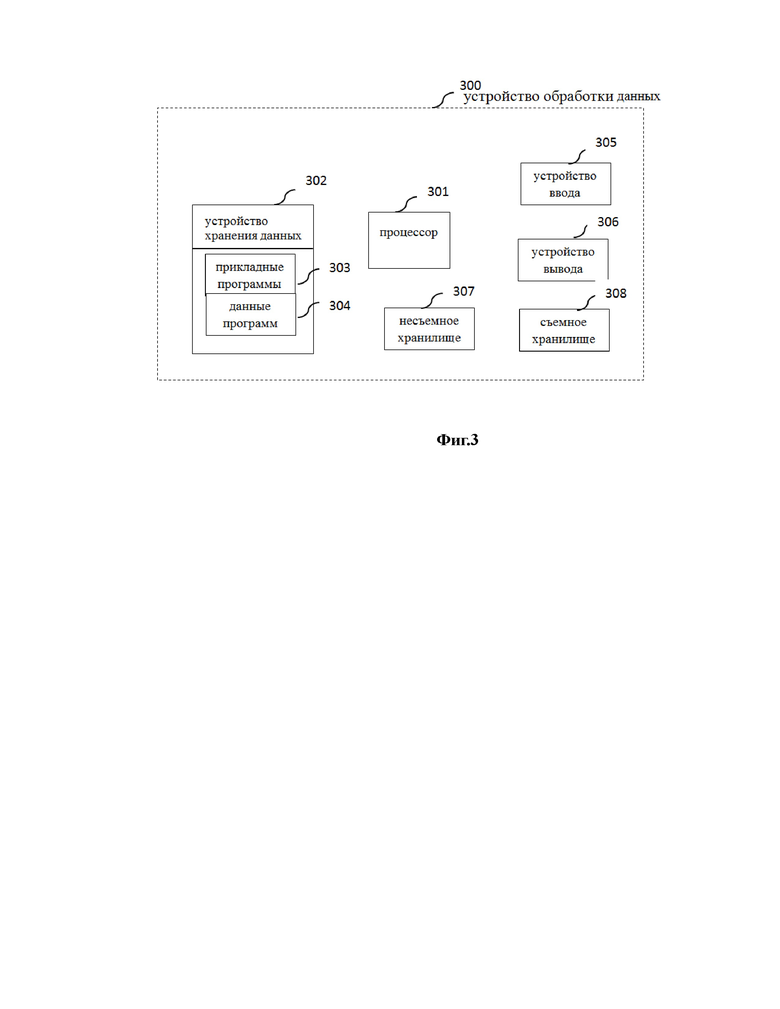
Фиг.3 – система для реализации способа управления пневматическими тормозами железнодорожного подвижного состава.
ПОДРОБНОЕ ОПИСАНИЕ ТЕХНИЧЕСКОГО РЕШЕНИЯ
В данном устройстве под системой подразумевается компьютерная система, ЭВМ (электронно-вычислительная машина), ЧПУ (числовое программное управление), ПЛК (программируемый логический контроллер), компьютеризированные системы управления и любые другие устройства, способные выполнять заданную, чётко определённую последовательность операций (действий, инструкций).
Под устройством обработки команд подразумевается электронный блок либо интегральная схема (микропроцессор), исполняющая машинные инструкции (программы).
Устройство обработки команд считывает и выполняет машинные инструкции (программы) с одного или более устройства хранения данных. В роли устройства хранения данных могут выступать, но, не ограничиваясь, жесткие диски (HDD), флеш-память, ПЗУ (постоянное запоминающее устройство), твердотельные накопители (SSD), оптические накопители информации (CD, DVD, Blue-Ray диски).
Программа - последовательность инструкций, предназначенных для исполнения устройством управления вычислительной машины или устройством обработки команд.
Ниже будут рассмотрены некоторые термины, которые в дальнейшем будут использоваться при описании технического решения.
Тормозом называется устройство на подвижном составе, при помощи которого создается искусственное сопротивление движению, в результате чего происходит снижение скорости или остановка поезда.
Тормозной путь – расстояние, проходимое поездом за время от момента перевода ручки крана машиниста или крана экстренного торможения в тормозное положение до полной остановки.
Тормоза классифицируются по способам создания тормозной силы и свойствам управляющей части. По способам создания тормозной силы различают фрикционные и динамические тормоза. По свойствам управляющей части различают тормоза автоматические и неавтоматические.
Автоведение – система автоматического ведения поездов (АВ) обеспечивает выполнение с заданной точностью графика движения поездов (при компенсируемых возмущающих воздействиях) путем расчета времен хода поездов по перегонам и длительности стоянок на станциях, выбора энергетически рациональных режимов управления для выполнения рассчитанных времен хода и прицельного торможения. Системы АВ работают под контролем систем обеспечения безопасности движения, используя единый программно-аппаратный комплекс.
Различают автономные и централизованные системы АВ.
Автономная система АВ (автомашинист) управляет движением одного поезда и устанавливается на борту. Она обеспечивает автоматическое управление временем хода поезда по перегону, длительность стоянок, прицельное торможение поезда по заданной программе. Централизованная система АВ содержит два функциональных контура управления движением поездов. Верхний контур управления определяет рассогласование между плановым и исполненным графиками движения всех поездов на участке, рассчитывает для каждого поезда требуемое время хода поезда по перегону и длительность стоянки. При некомпенсированных возмущающих воздействиях верхний контур пересчитывает (корректирует) плановый график движения. Нижний контур реализует заданное верхним контуром требуемое время хода поезда, длительность стоянки и осуществляет прицельное торможение.
Данное техническое решение обеспечивает более точное выполнение ограничений скорости, сигналов светофоров и избежание возможных аварийных ситуаций за счёт повышения эффективности использования системы пневматического торможения. Повышение эффективности использования системы пневматического торможения достигается за счёт уточнения параметров зависимости коэффициента трения колодки о бандаж от скорости и времен, в течение которого тормозная сила набирает максимальное значение и в течение которого происходит отпуск пневматических тормозов. Уточненная зависимость позволяет точнее рассчитывать координаты и скорости включения и отпуска пневматических тормозов.
Согласно предлагаемому техническому решению, способ управления пневматическими тормозами железнодорожного подвижного состава включает следующие шаги:
Определяют координату пути, по достижении которой необходимо снизить скорость железнодорожного подвижного состава.
В поезде с аппаратуры (например, скорость поступает с одометрического датчика скорости, координата поступает из навигационной системы, давление с датчика давления). При пневматическом торможении тормозная сила выглядит следующим образом:
где  – тормозной коэффициент (
– тормозной коэффициент ( – давление,
– давление,  – время):
– время):
где  – суммарное нажатие на тормозные колодки по всему поезду,
– суммарное нажатие на тормозные колодки по всему поезду,  – масса поезда,
– масса поезда,
 – коэффициент трения
– коэффициент трения
Коэффициент трения может выглядеть следующим образом:
 (1)
(1)
(что в итоге сводится к  ).
).
Для композиционных колодок параметры зависимости (1) могут быть следующими:
 .
.
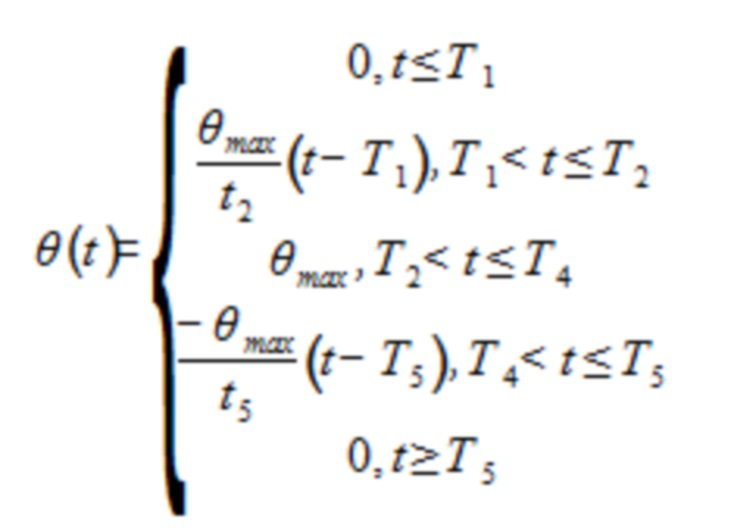
Значения параметров изначально берутся из паспортных характеристик системы торможения. При нажатии на тормоз тормозная волна распространяется по поезду, и соответственно суммарная сила нажатия на колодки возрастает от нуля до своего максимального значения по ходу распространения тормозной волны от локомотива до последнего вагона. При отпуске же тормозов сила нажатия убывает со своего максимального значения до нуля. График зависимости тормозного коэффициента от времени изображен на Фиг.1.
Момент  подразумевает момент начала торможения, где
подразумевает момент начала торможения, где  - время, в течении которого тормозная сила не появляется, затем в течение времени
- время, в течении которого тормозная сила не появляется, затем в течение времени  тормозной коэффициент возрастает до максимального значения, и держит максимальное значение в течение
тормозной коэффициент возрастает до максимального значения, и держит максимальное значение в течение  вплоть до отпуска тормозов. После начала отпуска тормозов, в течении времени
вплоть до отпуска тормозов. После начала отпуска тормозов, в течении времени  тормозной коэффициент продолжает оставаться максимальным, затем начинает снижаться и за время
тормозной коэффициент продолжает оставаться максимальным, затем начинает снижаться и за время  падает до нуля, торможение закончено.
падает до нуля, торможение закончено.
Времена  - являются постоянными для конкретного поезда.
- являются постоянными для конкретного поезда.
Таким образом, если время отсчитывается от нажатия на тормоз, зависимость тормозного коэффициента от времени выглядит так:
Максимальное значение этого коэффициента  - зависит от разрядки тормозной магистрали, например:
- зависит от разрядки тормозной магистрали, например:

Коэффициент  из формулы
из формулы  можно включить в коэффициенты
можно включить в коэффициенты  . Таким образом, получаем формулу тормозной силы:
. Таким образом, получаем формулу тормозной силы:
Типичная картина пневматического торможения графически изображена на Фиг.2. На графике черная линия - это давление в локомотиве, синяя - скорость локомотива.
В приведенном в уровне техники прототипе считается, что программная скорость рассчитывается следующим образом:
vp = f (S, Is, АЛС, Op),
где
S – расстояние до прицельной точки;
Is – уклон (профиль пути);
АЛС — показание светофора;
Op – тормозной коэффициент.
Ускорение (замедление) поезда при применении пневматического торможения может быть рассчитано следующим образом:
Kct – давление, соответствующее нужной ступени торможения;
Тем самым, в описываемом техническом решении, уточняя коэффициенты c1, c2, уточняется значение программной скорости и способ (прототип) становится более эффективным.
Определяется скорость железнодорожного подвижного состава, которая должна быть в определенной ранее координате пути.
Определяются параметры зависимости коэффициента трения колодки о бандаж от программной скорости; определяется тормозной коэффициент; определяется время, в течении которого тормозная сила набирает максимальное значение.
Формула тормозной силы:

Определяются параметры  Тормозная сила — это произведение тормозного коэффициента
Тормозная сила — это произведение тормозного коэффициента  и коэффициента трения
и коэффициента трения . Так как они перемножаются, то
. Так как они перемножаются, то  можем внести в. Таким образом, параметры
можем внести в. Таким образом, параметры  отвечают за поведение коэффициента трения колодок. После начала пневматического торможения давление в тормозной магистрали начинает снижаться и в течении времени
отвечают за поведение коэффициента трения колодок. После начала пневматического торможения давление в тормозной магистрали начинает снижаться и в течении времени  тормозная сила становится равной 0. Затем тормозной коэффициент возрастает до максимального значения. Время
тормозная сила становится равной 0. Затем тормозной коэффициент возрастает до максимального значения. Время , в течении которого тормозной коэффициент возрастает зависит от внешних условий и от строения конкретного поезда, и соответствует времени распространения тормозной волны по поезду. Максимальное значение тормозного коэффициента зависит от разрядки тормозной магистрали. Зависимость максимального значения тормозного коэффициента от разрядки тормозной магистрали может быть следующей:
, в течении которого тормозной коэффициент возрастает зависит от внешних условий и от строения конкретного поезда, и соответствует времени распространения тормозной волны по поезду. Максимальное значение тормозного коэффициента зависит от разрядки тормозной магистрали. Зависимость максимального значения тормозного коэффициента от разрядки тормозной магистрали может быть следующей:
 , (2)
, (2)
где - параметры зависимости.
- параметры зависимости.
Затем, до начала отпуска пневматических тормозов значение тормозного коэффициента остаётся постоянным (что соответствует моменту T3 на чертеже).После начала отпуска пневматических тормозов, в течении времени  тормозной коэффициент также остаётся постоянным. Затем, в течении времени
тормозной коэффициент также остаётся постоянным. Затем, в течении времени  тормозной коэффициент снижается до нуля. Таким образом, параметры
тормозной коэффициент снижается до нуля. Таким образом, параметры  отвечают за поведение коэффициента трения колодок, а параметры
отвечают за поведение коэффициента трения колодок, а параметры  описывают поведение тормозного коэффициента.
описывают поведение тормозного коэффициента.
В отличие от прототипа, в предлагаемом техническом решении определяются параметры зависимости тормозного коэффициента от времени.
Уточнение параметров указанной зависимости может происходить одним из известных способов, например, с помощью дискретного фильтра Калмана.
При этом записывается уравнение наблюдения:
где:

где m – масса поезда, mл – масса локомотива. На каждом шаге j вектор измерений - ; вектор состояний -
; вектор состояний -  .
.
 – матрица ковариаций шума параметров (7х7),
– матрица ковариаций шума параметров (7х7),  – матрица ковариаций шума измерений (2х2).
– матрица ковариаций шума измерений (2х2).
Вычисляется  , где L – размерность вектора состояний (в нашем случае 7),
, где L – размерность вектора состояний (в нашем случае 7),  , где
, где
 - параметры цикла, которые, например, могут быть равны:
- параметры цикла, которые, например, могут быть равны:
 . Таким образом
. Таким образом  .
.
В случае, когда матрица B – не симметричная, можно выполнить замену переменных: . Выполняется разложение матрицы P:
. Выполняется разложение матрицы P:
Затем, применяя разложение Холецкого к матрице D, получается матрица B:
 .
.
Далее генерируется  сигма-точек
сигма-точек (u – вектор столбец из единиц размерности L):
(u – вектор столбец из единиц размерности L):

Далее, подставляя полученные выше сигма-точки в уравнения наблюдения, получается расчетных точек измерений  .
.
Затем суммируются полученные точки с заданными весами.
Формулы для весов:
 - расчетное значение вектора измерений на данном шаге.
- расчетное значение вектора измерений на данном шаге.
Вычисляется матрица ковариаций: 
Вычисляется матрица кросс-вариаций: 
Вычисляется матрица коэффициентов усиления: 
Обновляется вектор состояния:

Обновляется матрица ковариаций:
Определяется время, в течении которого происходит отпуск пневматических тормозов: при каждом применении пневматического торможения измеряется время, в течении которого происходит отпуск пневматических тормозов. Накапливая эту информацию, определяется, например, статистическими методами время, в течение которого происходит отпуск.
Определяется координата пути, в которой необходимо начать пневматическое торможение, и координату пути, в которой необходимо начать отпуск пневматических тормозов.
При достижении координаты пути, в которой необходимо начать торможение в систему управления железнодорожного подвижного состава передаётся команда на начало торможения.
При достижении координаты пути, в которой необходимо начать отпуск пневматических тормозов передается в систему управления железнодорожного подвижного состава команда на отпуск пневматических тормозов.
Расчёт координаты и скорости подвижного состава при нахождении в ней, в которой необходимо начать торможение и координаты, в которой необходимо начать отпуск пневматических тормозов производится следующим образом:
Решается уравнение движения (все силы здесь удельные, разделены на массу поезда):
 (3)
(3)
где  введенная выше тормозная сила,
введенная выше тормозная сила,  – сила сопротивлению движения (функция от скорости),
– сила сопротивлению движения (функция от скорости), – сила, создаваемая профилем пути.
– сила, создаваемая профилем пути.
Граничные условия: 
Далее находится численное решение уравнения (3), одним из известных методов, например дискретизируя его:
 . Время
. Время , в течение которого пневматические тормоза держатся на максимальном уровне задаётся, в отличие от остальных времён (
, в течение которого пневматические тормоза держатся на максимальном уровне задаётся, в отличие от остальных времён (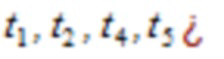 ). В предлагаемом изобретении рассчитается время. При этом известно минимальное значение.
). В предлагаемом изобретении рассчитается время. При этом известно минимальное значение.
Согласно Фиг.3, примерная система для реализации технического решения включает в себя устройство обработки данных 300. Устройство обработки данных 300 может быть сконфигурировано как клиент, сервер, мобильное устройство или любое другое вычислительное устройство, которое взаимодействует с данными в системе совместной работы, основанной на сети. В самой базовой конфигурации устройство обработки данных 300, как правило, включает в себя, по меньшей мере, один процессор 301 и устройство хранения данных 302. В зависимости от точной конфигурации и типа вычислительного устройства системная память 302 может быть энергозависимой (например, оперативное запоминающее устройство (ОЗУ, RAM)), энергонезависимой (например, постоянное запоминающее устройство (ПЗУ, ROM)) или некоторой их комбинацией. Устройство хранения данных 302, как правило, включает в себя одну или более прикладных программ 303 и может включать в себя данные 304 программ. Настоящее техническое решение как способ, описанное в деталях выше, реализовано в прикладных программах 303.
Устройство обработки данных 300 может иметь дополнительные особенности или функциональные возможности. Например, устройство обработки данных 300 может также включать в себя дополнительные устройства хранения данных (съемные и несъемные), такие как, например, магнитные диски, оптические диски или лента. Такие дополнительные хранилища проиллюстрированы на Фиг.3 посредством несъемного хранилища 307 и съемного хранилища 308. Компьютерные носители данных могут включать в себя энергозависимые и энергонезависимые, съемные и несъемные носители, реализованные любым способом или при помощи любой технологии для хранения информации. Устройство хранения данных 302, несъемное хранилище 307 и съемное хранилище 308 являются примерами компьютерных носителей данных. Компьютерные носители данных включают в себя, но не в ограничительном смысле, оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), электрически стираемое программируемое ПЗУ (EEPROM), флэш-память или память, выполненную по другой технологии, ПЗУ на компакт-диске (CD-ROM), универсальные цифровые диски (DVD) или другие оптические запоминающие устройства, магнитные кассеты, магнитные ленты, хранилища на магнитных дисках или другие магнитные запоминающие устройства, или любую другую среду, которая может быть использована для хранения желаемой информации и к которой может получить доступ устройство обработки данных 300. Любой такой компьютерный носитель данных может быть частью устройства 300. Устройство обработки данных 300 может также включать в себя устройство(а) 305 ввода, такие как клавиатура, мышь, перо, устройство с речевым вводом, устройство сенсорного ввода, и так далее. Устройство (а) 306 вывода, такие как дисплей, динамики, принтер и тому подобное, также могут быть включены в состав устройства.
Устройство обработки данных 300 содержит коммуникационные соединения, которые позволяют устройству связываться с другими вычислительными устройствами, например по сети. Сети включают в себя локальные сети и глобальные сети наряду с другими большими масштабируемыми сетями, включая, но не в ограничительном смысле, корпоративные сети и экстрасети. Коммуникационное соединение является примером коммуникационной среды. Как правило, коммуникационная среда может быть реализована при помощи машиночитаемых инструкций, структур данных, программных модулей или других данных в модулированном информационном сигнале, таком как несущая волна, или в другом транспортном механизме, и включает в себя любую среду доставки информации. Термин «модулированный информационный сигнал» означает сигнал, одна или более из его характеристик изменены или установлены таким образом, чтобы закодировать информацию в этом сигнале. Для примера, но без ограничения, коммуникационные среды включают в себя проводные среды, такие как проводная сеть или прямое проводное соединение, и беспроводные среды, такие как акустические, радиочастотные, инфракрасные и другие беспроводные среды. Термин «машиночитаемый носитель», как употребляется в этом документе, включает в себя как носители данных, так и коммуникационные среды.
Специалисту в данной области, очевидно, что конкретные варианты осуществления способа и системы управления пневматическими тормозами железнодорожного подвижного состава описаны здесь в целях иллюстрации, допустимы различные модификации, не выходящие за рамки и сущности объема изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ИСПЫТАНИЯ ТОРМОЗНОГО ОБОРУДОВАНИЯ ВАГОНОВ | 2009 |
|
RU2414366C2 |
| Устройство и способ автоматического управления электропневматическими тормозами пассажирских поездов в процессе реализации служебного торможения | 2022 |
|
RU2822934C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2005 |
|
RU2283786C1 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗОМ ГРУЗОВОГО ЖЕЛЕЗНОДОРОЖНОГО ВАГОНА | 2011 |
|
RU2476340C1 |
| СПОСОБ ЗАРЯДКИ И ОПРОБОВАНИЯ ТОРМОЗОВ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2009 |
|
RU2422308C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2600470C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2749620C1 |
| СИСТЕМА УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2756140C1 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗОМ ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614468C2 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2009 |
|
RU2422314C1 |
Способ управления пневматическими тормозами железнодорожного подвижного состава, характеризующийся тем, что: определяют координату пути, по достижении которой необходимо снизить скорость железнодорожного подвижного состава; определяют скорость железнодорожного подвижного состава, которая должна быть в определенной ранее координате пути; определяют параметры зависимости коэффициента трения колодки о бандаж от программной скорости; определяют тормозной коэффициент; определяют время, в течение которого тормозная сила набирает максимальное значение; определяют время, в течение которого происходит отпуск пневматических тормозов; определяют координату пути, в которой необходимо начать пневматическое торможение, и координату пути, в которой необходимо начать отпуск пневматических тормозов; при достижении координаты пути, в которой необходимо начать торможение, в систему управления железнодорожного подвижного состава передают команду на начало торможения; при достижении координаты пути, в которой необходимо начать отпуск пневматических тормозов, передают в систему управления железнодорожного подвижного состава команду на отпуск пневматических тормозов. Машиночитаемый носитель данных, содержащий инструкции, исполнение которых реализует выполнение способа управления тормозами. Техническим результатом является повышение точности регулирования скорости и остановки подвижного состава. 3 н. и 5 з.п. ф-лы, 3 ил.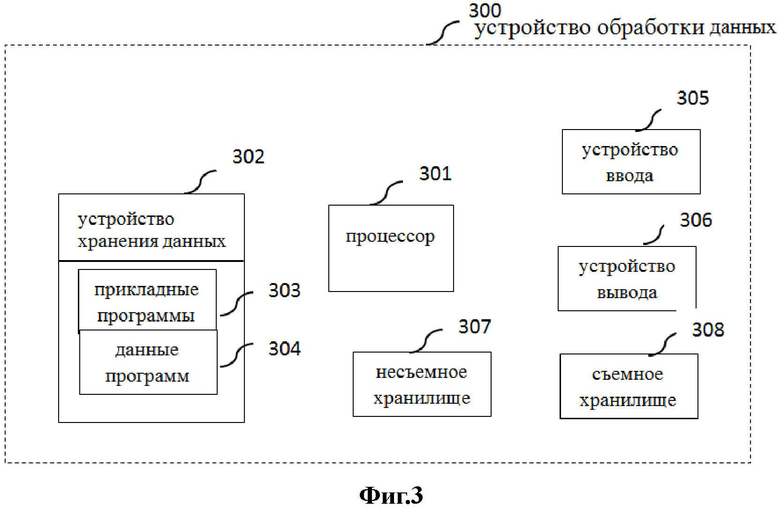
1. Способ управления пневматическими тормозами железнодорожного подвижного состава, характеризующийся тем, что:
- определяют координату пути, по достижении которой необходимо снизить скорость железнодорожного подвижного состава;
- с учетом координаты пути определяют скорость железнодорожного подвижного состава, которая должна быть в этой координате;
- рассчитывают программную скорость;
- определяют параметры зависимости коэффициента трения колодки о бандаж от программной скорости;
- определяют тормозной коэффициент, исходя из времени, которое отсчитывается от момента нажатия на тормоз;
- определяют тормозную силу, исходя из тормозного коэффициента и коэффициента трения колодки о бандаж;
- определяют время, в течение которого тормозная сила набирает максимальное значение;
- определяют статистическими методами время, в течение которого происходит отпуск пневматических тормозов, измеряя время при каждом применении пневматического торможения;
- определяют координату пути, в которой необходимо начать пневматическое торможение, и координату пути, в которой необходимо начать отпуск пневматических тормозов, исходя из уравнения движения;
- при достижении координаты пути, в которой необходимо начать торможение, в систему управления железнодорожного подвижного состава передают команду на начало торможения;
- при достижении координаты пути, в которой необходимо начать отпуск пневматических тормозов, передают в систему управления железнодорожного подвижного состава команду на отпуск пневматических тормозов.
2. Способ по п. 1, характеризующийся тем, что координату пути, по достижении которой необходимо снизить скорость железнодорожного подвижного состава, получают из системы машинного зрения.
3. Способ по п. 1, характеризующийся тем, что координату пути, по достижении которой необходимо снизить скорость железнодорожного подвижного состава, получают по радиоканалу.
4. Способ по п. 1, характеризующийся тем, что параметры зависимости коэффициента трения колодки о бандаж от программной скорости определяют циклично.
5. Способ по п. 1, характеризующийся тем, что тормозной коэффициент, исходя из времени, которое отсчитывается от момента нажатия на тормоз, определяют циклично.
6. Способ по п. 1, характеризующийся тем, что тормозную силу, исходя из тормозного коэффициента и коэффициента трения колодки о бандаж, определяют циклично.
7. Система управления пневматическими тормозами железнодорожного подвижного состава, содержащая:
 по крайней мере, одно устройство обработки команд;
по крайней мере, одно устройство обработки команд;
 по крайней мере, одно устройство хранения данных;
по крайней мере, одно устройство хранения данных;
 одну или более компьютерных программ, загружаемых в, по крайней мере, одно вышеупомянутое устройство хранения данных и выполняемых на, по крайне мере, одном из вышеупомянутых устройств обработки команд, при этом одна или более компьютерных программ содержат инструкции для выполнения способа по любому из пп. 1-6.
одну или более компьютерных программ, загружаемых в, по крайней мере, одно вышеупомянутое устройство хранения данных и выполняемых на, по крайне мере, одном из вышеупомянутых устройств обработки команд, при этом одна или более компьютерных программ содержат инструкции для выполнения способа по любому из пп. 1-6.
8. Машиночитаемый носитель данных, содержащий исполняемые одним или более процессором машиночитаемые инструкции, которые при их исполнении реализуют выполнение способа управления пневматическими тормозами железнодорожного подвижного состава по любому из пп. 1-6.
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДА | 2005 |
|
RU2283786C1 |
| 0 |
|
SU153536A1 | |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2004 |
|
RU2273567C1 |

