Изобретение относится к железнодорожному транспорту и может быть использовано для управления электропневматическими тормозами пассажирских поездов в процессе реализации служебного торможения.
При проведении патентного поиска были выявлены следующие аналоги.
Известно «Устройство адаптивного управления тормозным нажатием» (опубликовано в журнале: Повышение эффективности работы тормозной системы пассажирских поездов / Иванов П.Ю., Романовский А.И., Хамнаева А.А., Корсун А.А., Борутенко А.С. Транспорт: наука, техника, управление. // Научный информационный сборник. 2020. №3. С. 39-43.) [1].
Недостатком является то, что не были приведены графики зависимости коэффициента запаса по нажатию в зависимости от силы нажатия колодки на колесо и скорости движения поезда, а также графики зависимости силы торможения от силы нажатия колодки на колесо и скорости движения поезда, которые отражают алгоритм работы устройства. Не приведена блок схема структуры устройства.
Известно «Устройство для автоматического управления торможением поезда» [2] (RU 2283786, МПК: В60Т 8/172 (2006.01), B61L 3/12 (2006.01)), которым реализуется способ обеспечения безопасности движения поезда по станции, позволяющий осуществлять автоматический выбор и корректировку алгоритма управления служебным торможением поезда (расчет и реализацию тормозной траектории с определением фактического тормозного коэффициента) для обеспечения заданной величины снижения скорости на заданном тормозном пути или прицельной остановки у запрещающего сигнала с учетом фактических условий движения, в частности массы поезда, скорости движения, профиля пути и др.
Недостатком данного устройства является то, что заложенный в него алгоритм управления тормозами не учитывает зависимость эффективности работы тормозной системы от скорости движения поезда, т.е. торможение осуществляется с постоянным давлением в тормозном цилиндре, либо изменяющемся в процессе одного торможения максимум 2-3 раза (2-х, 3-х ступенчатое торможение) согласно способу управления тормозами [3, 4]. Устройство вычисляет фактическое тормозное нажатие, принимая коэффициент сцепления колеса с рельсом и силу трения колодки о колесо как постоянную величину в процессе всего цикла торможения.
Известна система управления движением пассажирского электровоза (УСАВП) (RU 2273567 С1, МПК: B60L 15/40 (2006.01), B61L 3/20 (2006.01) [5], осуществляющая расчет энергооптимального режима движения поезда по пути следования, выработку сигналов на управление тягой локомотива и торможением поезда, чем обеспечиваются реализация установленной скорости движения исходя из условий выполнения расписания при минимизации энергозатрат на тяговые нужды, установленной скорости подъезда к местам ограничения скорости, светофорам, требующим снижения скорости, а также остановка поезда служебным торможением перед, светофором с запрещающим сигналом.
Недостатком данного устройства является то, что заложенный в него алгоритм управления тормозами не учитывает зависимость эффективности работы тормозной системы от скорости движения. Устройство осуществляет управление тормозами согласно режимной карте и расписанию движения, не вычисляя фактических коэффициентов сцепления колеса с рельсом и трения колодки о колесо, влияющих на эффективность торможения, а также не контролирует запас силы сцепления колеса с рельсом относительно силы трения колодки о колесо обеспечивающий безъюзовое торможение.
Известен способ ручного управления электропневматическими тормозами, приведенный в Правилах технического обслуживания тормозного оборудования и управления тормозами железнодорожного подвижного состава [3]. Способ предусматривает наполнение тормозных цилиндров путем подачи электрического сигнала на электровоздухораспределители, причем длительность подачи сигнала определяет величину их наполнения. Первую ступень служебного торможения с применением электропневматического тормоза необходимо выполнять до давления в тормозных цилиндрах локомотива 0,05-0,15 МПа (0,5-1,5 кгс/см2) в зависимости от скорости движения поезда и крутизны спуска. Последующие ступени выполнять по необходимости, вплоть до полного служебного торможения с давлением в тормозных цилиндрах локомотива 0,37-0,39 МПа (3,8-4,0 кгс/см2).
Недостатком данного способа управления тормозами является то, что он не учитывает зависимость эффективности работы тормозной системы от скорости движения поезда, а также запаса силы сцепления колеса с рельсом относительно силы трения колодки о колесо, что иногда приводит к заклиниванию колесных пар и образованию ползунов.
Известен воздухораспределитель KEs [6], европейского типа, который используется на пассажирских вагонах международного сообщения. Максимальная допустимая скорость следования вагонов с воздухораспределителями KEs - 140 км/ч. В комплект воздухораспределителя входят: несъемный с вагона кронштейн, главная часть, состоящая из органа трех давлений и рабочей камеры с выпускным клапаном, ускоритель экстренного торможения, двухступенчатое реле давления, клапан для зарядки дополнительного запасного резервуара. Воздухораспределитель позволяет реализовать двухступенчатое нажатие чугунных колодок, которое достигается изменением давления в тормозных цилиндрах в зависимости от скорости. При тормозе KE-GPR на режиме R(ПС) в диапазоне высоких скоростей давление в тормозных цилиндрах автоматически устанавливается выше, чем при низких скоростях, с целью получения большей тормозной силы. При уменьшении скорости в процессе торможения до определенной величины давление воздуха в цилиндрах автоматически снижается до меньшего значения. Величины скоростей, при которых на режиме ПС предусмотрено автоматическое переключение с низкого давления в цилиндрах на высокое в процессе разгона, составляют примерно 100 км/ч, а обратный переход давлений при уменьшении скорости происходит 90 км/ч. Эти переключения осуществляются специальным регулятором центробежного типа, устанавливаемым на буксе одной из колесных пар и воздействующим на реле давления воздухораспределителя KEs.
Недостатком данного устройства является наличие всего лишь одной ступени торможения, т.е. при скоростях движения поезда выше 90 км/ч тормозные цилиндры наполняются сжатым воздухом до давления 0,4 МПа, а при следовании поезда со скоростью движения ниже 90 км/ч тормозные цилиндры наполняются до давления 0,2 МПа. Такой алгоритм учета изменения коэффициента трения при изменении скорости движения является наиболее простым, не обеспечивает торможение с максимальной эффективностью и повышает вероятность образования ползунов. Более того, данный воздухораспределитель является пневматическим, а это значит, что управляющие сигналы передаются при помощи сжатого воздуха и скорость срабатывания KEs ниже электропневматического воздухораспределителя усл. №305, т.е. подготовительный тормозной путь больше. Также применение пневматических тормозов вызывает продольно-динамические реакции в поезде.
Наиболее близким техническим решением, выбранным в качестве прототипа, является устройство автоматического управления электропневматическими тормозами поезда и способ его осуществления RU 2540212 Фандеева Е.И., Юренко К.И. [7]. Устройство автоматического управления электропневматическими тормозами поезда включает блоки программной скорости, постоянного запоминающего устройства, автоматической локомотивной сигнализации, приема информации от путевых устройств, измерители пути, скорости, ускорения, эффективности тормозов, трехпозиционный релейный элемент, вентили отпуска и торможения. Нечеткий контроллер соединен с блоком программной скорости, блоком дифференцирования, блоком корректировки рассогласования по давлению в тормозных цилиндрах, который также подключен к блоку программной скорости и к датчику давления в тормозных цилиндрах. Блок регулирования давления в тормозных цилиндрах соединен с выходом нечеткого контроллера с помощью коммуникационного канала связи и с датчиком давления в тормозных цилиндрах. Трехпозиционный релейный элемент соединен с блоком регулирования давления в тормозных цилиндрах и с блоком вентилей отпуска и торможения, который подключен к датчику давления в тормозных цилиндрах. Способ заключается в том, что на основании информации о текущей скорости, расстоянии до места остановки или следующего ограничения скорости, кодах сигналов светофора, профиле пути на участке, действительном значении тормозного коэффициента вычисляют программную скорость, определяют рассогласование программной и фактической скоростей движения, корректируют рассогласование с учетом величины давления в тормозных цилиндрах, выполняют управление вентилями отпуска и торможения тормозной системы поезда, рассчитывают производную рассогласования программной и фактической скоростей движения, с помощью нечеткого контроллера на основании процедуры нечеткого вывода определяют требуемое значение давления в тормозных цилиндрах, которое передают в блок регулирования давления в тормозных цилиндрах, проводят сравнение требуемого и фактического значений давлений, на основании которого выбирают режим работы тормозной системы. Достигается повышение надежности торможения.
Недостатком данного устройства является отсутствие учета динамики коэффициента трения колодки о колесо и коэффициента сцепления колеса с рельсом в процессе торможения.
Задачей изобретения является сокращение длинны тормозного пути пассажирских поездов и уменьшение вероятности заклинивания колесных пар.
Сущность изобретения в части устройства заключается в том, что устройство содержит датчик давления в тормозном цилиндре, датчик пути и скорости, микропроцессорный блок адаптивного управления торможением, к входам которого подключены датчик давления тормозного цилиндра, датчик пути и скорости, блок ввода данных, блок бортовой управляющей программы, причем к выходам микропроцессорного блока присоединены дисплей, блок управления электропневматическими тормозами.
Сущность изобретения в части способа заключается в том, что микропроцессорным блоком адаптивного управления торможением на основании информации о текущей скорости, расстоянии места остановки или следующего ограничения скорости, показании светофора, профиле пути на участке рассчитывают давление в тормозном цилиндре, при этом обеспечивается адаптивное управление торможением поезда, путем изменения давления в тормозном цилиндре, рассчитанное на основе программной адаптации с учетом изменения коэффициента запаса по нажатию в процессе служебного торможения.
Техническим результатом является то, что в процессе торможения обеспечивается поддержание запаса коэффициента сцепления колеса с рельсом относительно коэффициента трения колодки о колесо в зависимости от скорости движения поезда в заданном, наиболее оптимальном диапазоне, подтвержденном экспериментальными исследованиями, вследствие чего происходит сокращение длины тормозного пути, а также, снижается вероятность образования ползунов на низких скоростях.
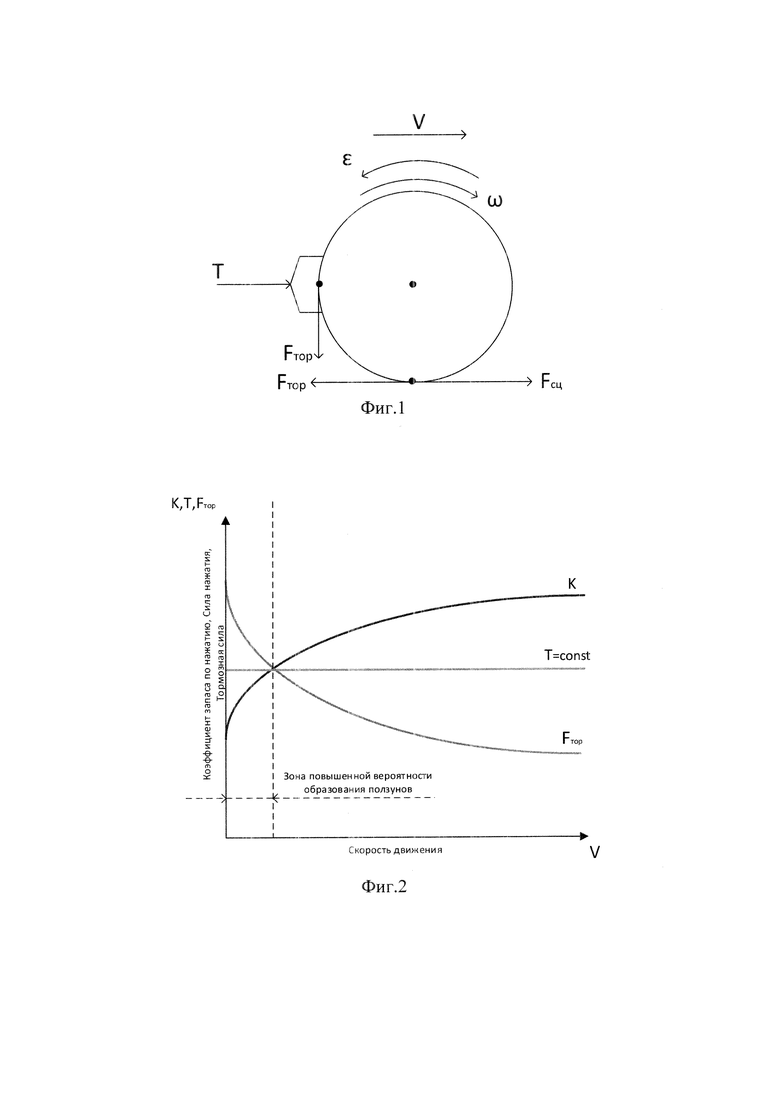
Рассмотрим схему расстановки сил, действующих на колесо в процессе торможения, фиг. 1. На данной схеме Fcu - сила сцепления колеса с рельсом, Fтоp - сила трения колодки о колесо, Т - сила нажатия на тормозную колодку, ω - угловое ускорение замедления, со - угловая скорость; V - скорость поступательного движения поезда. К данной схеме записаны формулы сил (1), (2), (4).
Для оценки величины запаса силы сцепления колеса с рельсом относительно силы трения колодки о колесо вводим новое понятие -коэффициент запаса по нажатию:

где Fсц - сила сцепления (формула 2), кН;
Fтop - тормозная сила (формула 4), кН.
Сила сцепления колеса с рельсом:

где q - сцепной вес, действующий на колесо, т;
ψ - коэффициент сцепления колеса с рельсом (формула 3).
Коэффициент сцепления колеса с рельсом:

где q0 - средняя нагрузка на ось;
ϑ - скорость движения поезда.
Тормозная сила:

где Т - сила прижатия тормозной колодки к колесу, кН;
ϕк - коэффициент трения колодки по колесу (формула 5, 6).
Коэффициент трения для чугунных колодок (для вагонов и локомотивов):

Коэффициент трения для композиционных колодок:

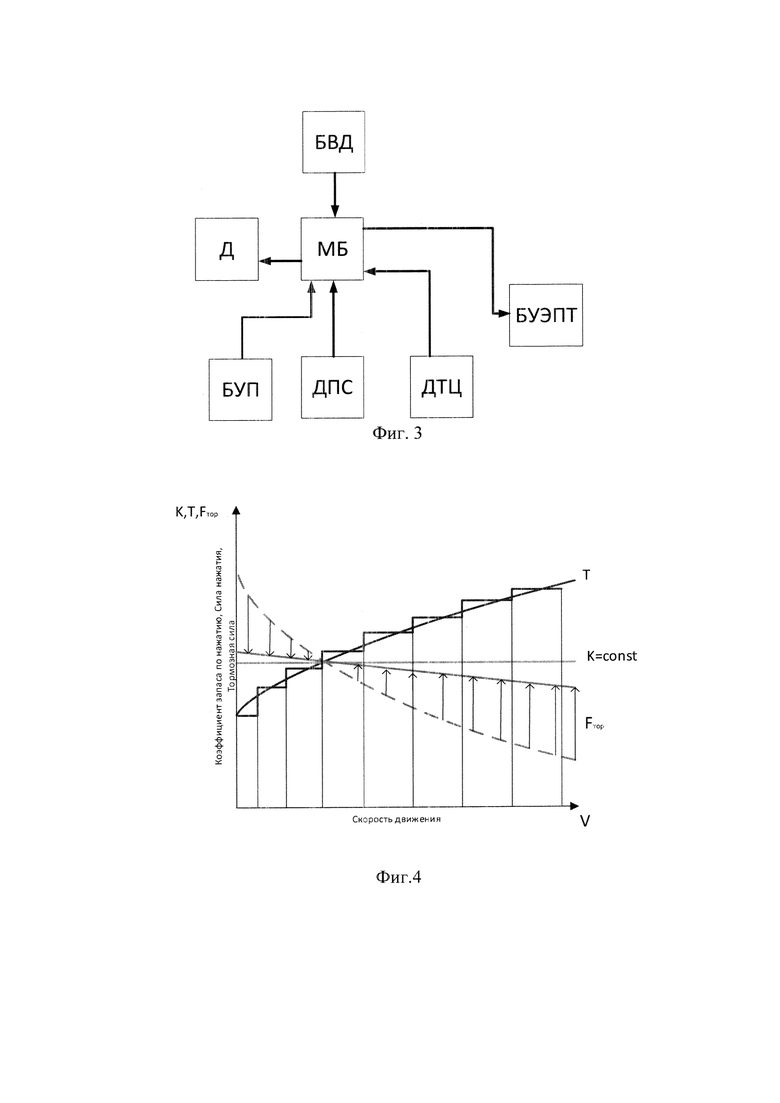
После анализа особенностей работы вышеупомянутых аналогов, фиг. 1, и формул, построены графики зависимостей коэффициента запаса по нажатию, тормозной силы, и силы прижатия колодки к колесу от скорости движения поезда, фиг. 2. Коэффициент запаса по нажатию характеризует запас силы сцепления колеса с рельсом относительно силы трения для обеспечения безъюзового торможения. Графики на фиг. 2 построены для способа управления тормозами с постоянной силой прижатия колодки к колесу как в ручном, так и в автоматическом режимах, применяемых на сегодняшний день при управлении тормозами. Также на графике указана зона повышенной вероятности образования ползунов, которая расположена в диапазоне малых скоростей движения. Это связано с тем, что коэффициент запаса по нажатию К в данном диапазоне резко снижается.
Согласно фиг. 2 общим недостатком всех применяемых способов управления тормозами является то, что при определении нужного нажатия не учитывается коэффициент трения колодки о колесо, изменяющийся в зависимости от скорости движения поезда и нажатия. Таким образом, при постоянном нажатии в процессе торможения тормозная сила является переменной. По этой причине тормозной путь на высоких скоростях растягивается из-за того, что на высокой скорости движения поезда коэффициент трения низкий, а на низких скоростях возникает опасность образования ползунов, так как коэффициент трения колодки о колесо значительно увеличивается. Приведенные способы и устройства обеспечивают плавность торможения, однако не обеспечивают максимальную эффективность тормозов, позволяющую сократить тормозной путь поезда и повысить среднюю скорость его движения.
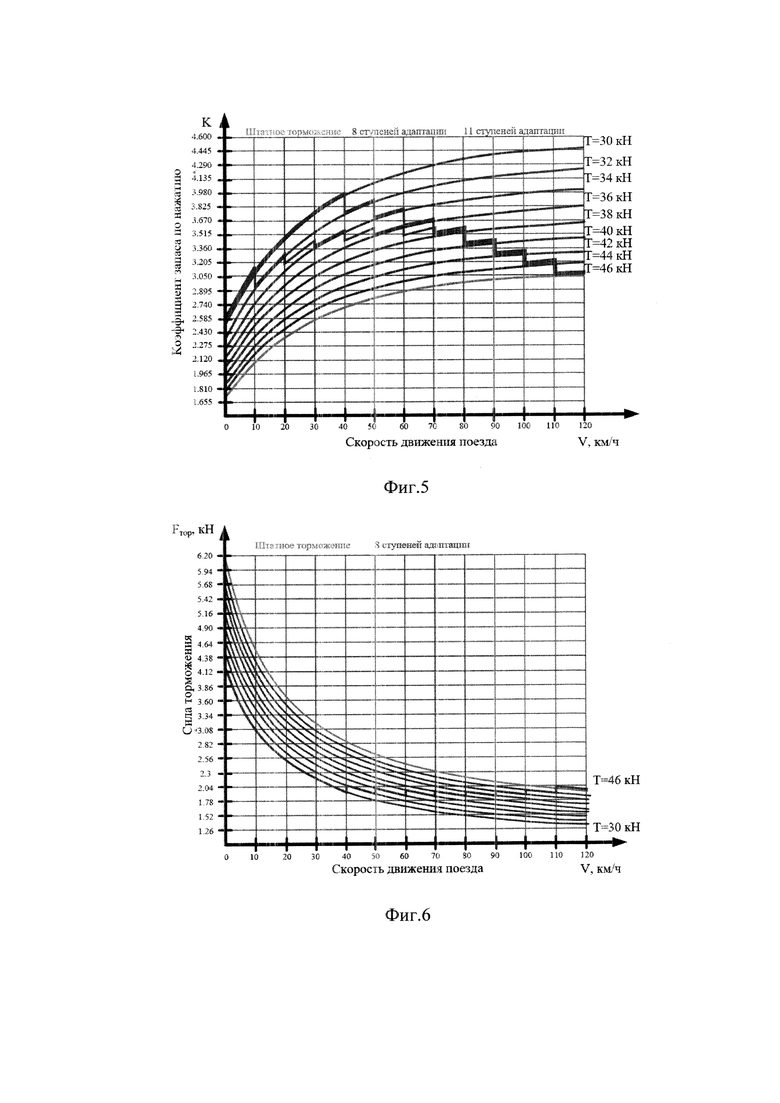
Устройство для реализации автоматического управления электропневматическими тормозами поездов в процессе реализации служебного торможения представлено в виде блок схемы на фиг. 3 (блок схема структуры устройства) МБ - микропроцессорный блок адаптивного управления торможением; БУП - блок бортовой управляющей программы; ДПС - датчик пути и скорости; Д - дисплей; ДТЦ - датчик давления тормозного цилиндра; БУЭПТ - блок управления электропневматическими тормозами; БВД - блок ввода данных). Устройство устанавливается в кабине машиниста и состоит из микропроцессорного блока адаптивного управления торможением к входам которого подключается датчик давления тормозного цилиндра, датчик пути и скорости, блок ввода данных, блок бортовой управляющей программы, а к выходам микропроцессорного блока адаптивного управления торможением подключается дисплей, блок управления электропневматическими тормозами.
Изобретение работает в трех режимах:
1. Полуавтоматический режим;
2. Автоматический режим;
3. Режим информирования.
Во время движения при осуществлении торможения в полуавтоматическом режиме машинист задает необходимую скорость в блок ввода данных и в нужный момент нажимает кнопку начала торможения на блоке ввода данных, который передает сигнал на микропроцессорный блок адаптивного управления торможением. После чего, микропроцессорный блок начинает снижение фактической скорости до заданного значения путем подачи импульсов управления на блок управления электропневматическими тормозами с учетом показания датчика давления тормозного цилиндра, датчика пути и скорости. Вследствие чего максимально быстро сбивается скорость с учетом условия безъюзового торможения, при этом в процессе снижения скорости и увеличения коэффициента трения колодки с колесом небольшими ступенями снижает давление в тормозном цилиндре, ослабляя нажатие в процессе замедления, тем самым, обеспечивая условия безъюзового торможения как показано на фиг. 4 (графики зависимости коэффициента запаса по нажатию K=f(V), силы торможения Fтоp=f(V), при переменном значении Т=f(V) от скорости движения поезда). На фиг. 4 показано каким образом изменяется величина запаса К (для наглядности на данной фигуре коэффициент запаса по нажатию условно принят постоянной величиной), формула (1), если изменять давление тормозного цилиндра и соответственно силу нажатия колодки на колесо Т. В соответствии с формулой (4), изменяя силу нажатия Т, зависимость тормозной силы, обозначенной пунктирной линией, прижимается к постоянной К. Тем самым, в пределах малых скоростей, вероятность образования ползунов уменьшается, в то же время тормозной путь уменьшается за счет увеличения тормозной силы в пределах средних и высоких скоростей. Характер изменения силы нажатия отражен зависимостью Т, которую предлагается реализовать ступенчатым образом в зависимости от скорости и коэффициента трения.
В случае работы устройства в автоматическом режиме на пассажирских поездах, бортовая управляющая программа передает информацию о параметрах движения пассажирского поезда, в частности необходимую скорость движения поезда в микропроцессорный блок. Как только фактическая скорость превысит необходимую, устройство начинает торможение с максимальной эффективностью, а именно микропроцессорный блок подает импульс управления на блок управления электропневматическими тормозами с учетом информации поступающей от датчиков ДТЦ, ДПС и выполнит адаптивное торможение.
В случае работы устройства в режиме информирования микропроцессорный блок адаптивного торможения выполняет непрерывный расчет рекомендуемого значения давления в тормозном цилиндре в реальном времени для текущей скорости по формуле (7), а также выводит это значение на дисплей. Рекомендуемое значение давления в тормозном цилиндре можно использовать для обеспечения максимальной эффективности торможения, формула (7).
Давление в тормозном цилиндре исходя из требуемого суммарного нажатия, вычисленного согласно алгоритму. формула (7)

где S - площадь штока, м2;
ηТРП _ коэффициент полезного действия тормозной рычажной передачи;
nтрп - передаточное отношение тормозной рычажной передачи;
∑Т - суммарное тормозное нажатие, кН.
На фиг. 5 представлен набор зависимостей коэффициента запаса по нажатию в зависимости от силы нажатия колодки на колесо и скорости движения поезда. На данной фигуре показано каким образом изменяется коэффициент запаса по нажатию на сегодняшний день, при использовании штатной тормозной системы пассажирского поезда (при постоянной силе нажатия колодки на колесо). Показан алгоритм реализации 8-ми и 11-ти ступенчатой адаптации, который заложен в микропроцессорный блок адаптивного торможения, и на основании которого выполняется торможение. Количество ступеней адаптации выбирается машинистом в зависимости от текущей ситуации: в случае движения пассажирского поезда согласно графика, машинистом используется 8-ми ступенчатая адаптация; в случае, если поезд отстает от графика движения и машинисту необходимо «нагнать» время, используется 11-ти ступенчатая адаптация, реализующая максимальную эффективность торможения. Торможение согласно представленному алгоритму изменения коэффициента запаса по нажатию по мнению авторов является наиболее оптимальным, что подтверждается экспериментальными исследованиями, т.е. позволяет обеспечивать выполнение условия безъюзового торможения даже при наиболее сложных условиях эксплуатации подвижного состава (погода, состояние рельсового пути и т.д.) при этом обеспечивается максимальная эффективность торможения.
На фиг. 6 представлен набор зависимостей силы торможения от силы нажатия колодки на колесо и скорости движения поезда. На данной фигуре показано каким образом изменяется сила торможения при торможении с помощью штатной тормозной системы (при постоянном нажатии). Показано как изменяется сила торможения при реализации адаптивного торможения микропроцессорным блоком (для исключения загромождения фигуры показана только 8-ми ступенчатая адаптация; 11-ти ступенчатая адаптация выполняется аналогично алгоритму, показанному на фиг. 5).
В результате применения устройства и способа автоматического управления электропневматическими тормозами пассажирских поездов снижается длина тормозного пути при реализации служебного торможения пассажирским поездом. При снижении тормозного пути появляется возможность увеличения участковой скорости движения поездов, что влечет за собой повышение провозной и пропускной способности участков и станций, уменьшение сроков доставки грузов и себестоимости грузовых перевозок. Помимо этого, уменьшается вероятность образования ползунов на малых скоростях движения. Стоит отметить, что использование предлагаемого изобретения особенно актуально на высокоскоростных поездах.
Список использованной литературы:
1. Повышение эффективности работы тормозной системы пассажирских поездов / Иванов П.Ю., Романовский А.И., Хамнаева А.А., Корсун А.А., Борутенко А.С. Транспорт: наука, техника, управление. // Научный информационный сборник. 2020. №3. С. 39-43.
2. Патент РФ №2283786, МПК: В60Т 8/172 (2006.01), B61L 3/12 (2006.01). Устройство для автоматического управления торможением поезда // Патент России №2283786 МПК: В60Т 8/172 (2006.01) / Головин В.И., Галеев А.И.
3. Правила технического обслуживания тормозного оборудования и управления тормозами железнодорожного подвижного состава, 2014. - 153 с.
4. Правила тяговых расчетов для поездной работы, 2016. - 510 с.
5. Патент России №2273567 С1 МПК: B60L 15/40 (2006.01), B61L 3/20 (2006.01). Система автоматизированного управления движением пассажирского, электровоза (УСАВП) // №2273567 С1 МПК: B60L 15/40 (2006.01), B61L 3/20 (2006.01). / Завьялов Е.Е., Богатков М.Ю., Донской А.Л., [и др.].
6. Тормозное оборудование железнодорожного подвижного состава: Справочник / В.И. Крылов, В.В. Крылов, В.Н. Ефремов, П.Т. Демушкин - М.: Транспорт, 1989 - 487 с: ил., табл. - Библиогр.: с. 487.
7. Патент РФ №2540212. Устройство автоматического управления электропневматическими тормозами поезда и способ его осуществления// Патент России RU 2540212 / Фандеев Е.И., Юренко К.И.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ПНЕВМАТИЧЕСКИМИ ТОРМОЗАМИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2017 |
|
RU2715915C2 |
| УСТРОЙСТВО ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2008 |
|
RU2392145C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИСПЫТАНИЯ ТОРМОЗНОГО ОБОРУДОВАНИЯ ВАГОНОВ | 2009 |
|
RU2414366C2 |
| СПОСОБ АКТИВНОЙ ЗАЩИТЫ ОТ ЮЗА КОЛЁСНЫХ ПАР ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2200102C2 |
| БОРТОВОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ЭФФЕКТИВНОСТИ АВТОТОРМОЗОВ ПОЕЗДА В ПУТИ СЛЕДОВАНИЯ | 2005 |
|
RU2293673C2 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНЫМ ФРИКЦИОННЫМ УСТРОЙСТВОМ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА С РЕГУЛИРУЕМОЙ ЗАЩИТОЙ ОТ СКОЛЬЖЕНИЯ | 2011 |
|
RU2573191C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДОВ КОМПЛЕКСНАЯ | 2019 |
|
RU2732495C1 |
| СПОСОБ ДЕЙСТВИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКОГО ТОРМОЗА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2392141C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ ТОРМОЗНОЙ МЕХАНИЗМ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА, СПОСОБ ЕГО ФУНКЦИОНИРОВАНИЯ, РЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2009 |
|
RU2526405C2 |
| Способ торможения колесного транспортного средства | 1987 |
|
SU1518171A1 |
Изобретение относится к железнодорожному транспорту и может быть использовано для управления электропневматическими тормозами пассажирских поездов в процессе реализации служебного торможения. Способ автоматического управления электропневматическими тормозами пассажирских поездов в процессе реализации служебного торможения заключается в том, что на основании информации о текущей скорости, расстоянии места остановки или следующего ограничения скорости, показании светофора, профиле пути на участке рассчитывают давление в тормозном цилиндре, при этом обеспечивают адаптивное управление торможением поезда путем изменения давления в тормозном цилиндре, рассчитанное на основе программной адаптации с целью поддержания постоянного значения коэффициента запаса по нажатию в процессе служебного торможения. Устройство для реализации этого способа включает микропроцессорный блок адаптивного управления торможением, блок бортовой управляющей программы, датчик пути и скорости, дисплей, датчик давления тормозного цилиндра, блок управления электропневматическими тормозами, блок ввода данных. Устройство устанавливается в кабине машиниста и состоит из микропроцессорного блока адаптивного управления торможением, к входам которого подключается датчик давления тормозного цилиндра, датчик пути и скорости, блок ввода данных, а к выходам микропроцессорного блока подключается дисплей, блок управления электропневматическими тормозами. В микропроцессорный блок заложен программный алгоритм, обеспечивающий расчеты и управление давления тормозного цилиндра. Изобретение работает в трех режимах: 1 - полуавтоматический режим; 2 - автоматический режим; 3 - режим информирования. Технический результат - сокращение длинны тормозного пути пассажирских поездов и уменьшение вероятности заклинивания колесных пар. 2 н.п. ф-лы, 6 ил.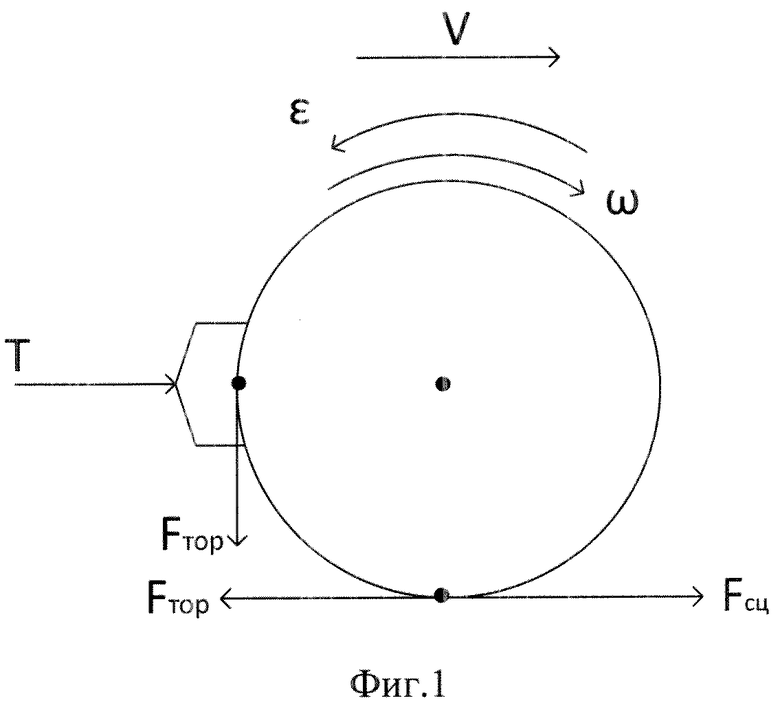
1. Способ автоматического управления электропневматическими тормозами пассажирских поездов в процессе реализации служебного торможения, заключающийся в том, что на основании информации о текущей скорости, расстоянии места остановки или следующего ограничения скорости, показании светофора, профиле пути на участке рассчитывают давление в тормозном цилиндре, отличающийся тем, что устройство в процессе реализации служебного торможения работает в трех режимах: полуавтоматическом, автоматическом и режиме информирования, причем при работе в полуавтоматическом режиме начинает снижение фактической скорости до заданного значения; при работе в режиме информирования выполняет непрерывный расчет рекомендуемого значения давления в тормозном цилиндре в реальном времени для текущей скорости; при работе в автоматическом режиме устройство начинает торможение с максимальной эффективностью, обеспечивается адаптивное управление торможением поезда путем изменения давления в тормозном цилиндре, рассчитанное на основе программной адаптации с целью поддержания постоянного значения коэффициента запаса по нажатию в процессе служебного торможения.
2. Устройство для реализации способа автоматического управления электропневматическими тормозами по п. 1, включающее датчик давления в тормозном цилиндре, датчик пути и скорости, отличающееся тем, что содержит микропроцессорный блок адаптивного управления торможением, к входам которого подключены датчик давления тормозного цилиндра, датчик пути и скорости, блок ввода данных, блок бортовой управляющей программы, причем к выходам микропроцессорного блока присоединены дисплей, блок управления электропневматическими тормозами.
| RU 2019115310 A, 24.11.2020 | |||
| Грузопоршневой барометр | 1961 |
|
SU147825A1 |
| Способ выделения фталонитрила | 1955 |
|
SU102336A1 |

