Изобретение относится к области дорожно-строительного машиностроения и лесозаготовительного комплекса, а именно к ходовым системам строительно-дорожных и лесозаготовительных машин, в частности, к конструкции балансирной тележки автогрейдеров и форвардеров (сортиментовозов).
Наиболее близким по технической сущности к заявленному изобретению является ведущий мост самоходной строительной машины [авторское свидетельство на изобретение СССР №519525, МПК: E02F 3/62, EO2F 9/02, В60К 17/04, опубл. 1976 г], включающий поперечную балку, расположенные в ней главную передачу и полуоси, продольные балансиры, монтированные на концах поперечной балки, силовые передачи внутри каждого из балансиров, состоящие из ведущего и ведомого элементов и укрепленные на концах балансиров колеса. В ведущем элементе силовой передачи каждого балансира монтирован планетарный ряд, состоящий из эпициклической шестерни, жестко соединенной с поперечной балкой солнечной шестерни, установленной на полуоси, и водила, соединенного с солнечной шестерней с помощью сателлитов и установленного в поперечной балке на подшипниках. Изобретение позволяет обеспечить равномерное распределение нагрузок на колеса при уменьшении габаритов главной передачи.
Недостатком данного устройства является снижение тяговых показателей колесного движителя, обусловленное действием явления циркуляции мощности, при котором происходит перераспределение горизонтальных и вертикальных реакций опорной поверхности, совместно действующих на ведущие колеса балансиров при движении машины.
Техническим результатом изобретения является повышение тяговых показателей колесного движителя за счет минимизации действия явления циркуляции мощности путем компенсации перераспределения горизонтальных и вертикальных реакций опорной поверхности, совместно действующих на ведущие колеса балансиров при движении машины.
На взаимосвязанные передние и задние ведущие колеса балансира действуют неодинаковые вертикальные нагрузки, вызывающие различную деформацию шин, рабочие радиусы колес оказываются несколько отличными друг от друга, вследствие чего одно из колес будет блокироваться и пробуксовывать [Севров К.П., Горячко Б.В., Покровский А.А. Автогрейдеры. Конструкции, теория, расчет. - М.: Машиностроение, 1970. - С. 168-173]. В результате взаимодействия блокированного балансирного колесного движителя и опорной поверхности происходит перераспределение горизонтальных и вертикальных реакций по ведущим колесам балансира, приводя к повороту балансиров вокруг точки подвеса, в сторону, противоположную подводимому крутящему моменту, вызывая явление циркуляции мощности, снижающего тяговые показатели машины. [Ульянов Н.А. Колесные движители строительных и дорожных машин. Теория и расчет. - М.: Машиностроение, 1969. - С. 497-505.].
Указанный технический результат достигается тем, что исключается блокирование колес балансирной тележки за счет разрыва жесткой связи между ними и обеспечивается регулируемый независимый привод каждого из колес, в результате чего происходит компенсация перераспределения горизонтальных и вертикальных реакций опорной поверхности, совместно действующих на ведущие колеса балансиров, таким образом, минимизируется действие явления циркуляции мощности, что приводит к повышению тяговых показателей колесного движителя.
Сущность изобретения заключается в том, что дополнительно введены вторичная силовая установка, кинематически связанная с двигателем внутреннего сгорания, приводные механизмы колес с приводными валами, установленные на балансирах и связанные со вторичной силовой установкой, блок управления, имеющий тринадцать входов и восемь выходов, датчик положения педали акселератора, связанный с педалью акселератора, выход датчика положения педали акселератора соединен со входом тринадцать блока управления, датчики угловой скорости, установленные на приводных валах каждого из колес, выход датчика угловой скорости переднего левого колеса, выход датчика угловой скорости заднего левого колеса, выход датчика угловой скорости заднего правого колеса и выход датчика угловой скорости переднего правого колеса соединены соответственно с первым, третьим, шестым и восьмым входами блока управления, датчики крутящего момента, установленные на приводных валах каждого из колес, выход датчика крутящего момента переднего левого колеса, выход датчика крутящего момента заднего левого колеса, выход датчика крутящего момента заднего правого колеса и выход датчика крутящего момента переднего правого колеса соединены соответственно со вторым, четвертым, пятым и седьмым входами блока управления, датчики вертикальных нагрузок, установленные на подшипниках приводных валов каждого из колес, выход датчика вертикальных нагрузок переднего левого колеса, выход датчика вертикальных нагрузок заднего левого колеса, выход датчика вертикальных нагрузок заднего правого колеса и выход датчика вертикальных нагрузок переднего правого колеса соединены соответственно с девятым, десятым, одиннадцатым и двенадцатым входами блока управления, элементы согласования по угловой скорости и крутящему моменту, установленные перед приводными механизмами передних колес, первый и четвертый выходы блока управления соединены соответственно со входами элементов согласования по угловой скорости переднего левого и переднего правого колес, второй и третий выходы блока управления соединены соответственно со входами элементов согласования по крутящему моменту переднего левого и переднего правого колес, элементы задающие угловую скорость и крутящий момент, установленные перед приводными механизмами задних колес, пятый и восьмой выходы блока управления соединены соответственно со входами элементов задающих угловую скорость заднего левого и заднего правого колес, шестой и седьмой выходы блока управления соединены соответственно со входами элементов задающих крутящий момент заднего левого и заднего правого колес.
Крутящий момент от двигателя внутреннего сгорания передается ко вторичной силовой установке, которая преобразует механическую энергию базового двигателя машины, например, в электрическую и передает ее на приводные механизмы колес балансира. Вторичная силовая установка может быть выполнена, например, в виде дизель-генераторной установки, создающей электрическую энергию с требуемыми параметрами. Приводные механизмы колес преобразуют полученную энергию от вторичной силовой установки во вращательное движение связанных с ними приводных валов колес и могут быть выполнены, например, в виде асинхронных электродвигателей. Задние колеса балансирной тележки являются приводными и задают движение машины, а передние, также являющиеся приводными, согласуют свою работу с задними. Для обеспечения требуемых значений вращения задних колес применяются элементы задающие угловую скорость и крутящий момент, а необходимое согласование движения передних и задних колес балансира обеспечивают датчики вертикальных нагрузок, угловой скорости и крутящего момента, элементы согласования по угловой скорости и элементы согласования по крутящему моменту, а также блок управления.
Датчик положения педали акселератора, который может устанавливаться на педаль акселератора, датчики вертикальных нагрузок, которые могут устанавливаются на подшипниках приводных валов, датчики угловой скорости и крутящего момента, которые могут устанавливаться на приводных валах балансира, например, электромагнитные, предназначены для получения соответствующих показателей и последующей передачи их в виде сигнала в блок управления.
В блок управления, который может быть выполнен в виде микроконтроллера, от датчика положения педали акселератора подается сигнал, задающий скорость движения машины, который преобразуется в сигналы управления для элементов задающих угловую скорость и крутящий момент задних колес. Элемент задающий угловую скорость колеса, может быть выполнен в виде микросхемы и устанавливаться перед механизмом привода колеса для обеспечения изменения круговой частоты возбуждения магнитного поля (частота питающего напряжения) механизма привода колеса, при этом, при изменении частоты напряжения, подаваемого на механизм привода колеса, будет соответственно изменяться и его угловая скорость. Элемент задающий крутящий момент колеса может быть выполнен в виде микросхемы и устанавливаться перед механизмом привода колеса для обеспечения изменения величины питающего напряжения механизма привода колеса, при этом, при изменении питающего напряжения, подаваемого на механизм привода колеса, будет соответственно изменяться и его крутящий момент.
В блоке управления, с учетом положения педали акселератора и параметров вертикальных нагрузок на колесах, каждому значению угловой скорости и крутящего момента правого и левого заднего колеса заложено соответствующее значение угловой скорости и крутящего момента правого и левого переднего колеса, если эти значения соответствуют, то система находится в равновесии, если эти значения не соответствуют, то вырабатываются сигналы управления. Для изменения угловой скорости, например, переднего левого колеса, блок управления вырабатывает сигнал на элемент согласования по угловой скорости, например, микросхему, которая может устанавливаться перед приводным механизмом левого переднего колеса, в результате изменения входного параметра, например, частоты возбуждающего магнитного поля (частота питающего напряжения), будет меняться угловая скорость механизма привода переднего левого колеса. Для изменения крутящего момента, например переднего левого колеса, блок управления вырабатывает сигнал на элемент согласования по крутящему моменту, например, микросхему, которая может устанавливаться перед элементом согласования по угловой скорости переднего левого колеса, в результате изменения входного параметра, например, величины питающего напряжения, будет меняться крутящий момент механизма привода переднего левого колеса. Аналогично изменяются угловая скорость и крутящий момент на правом переднем колесе.
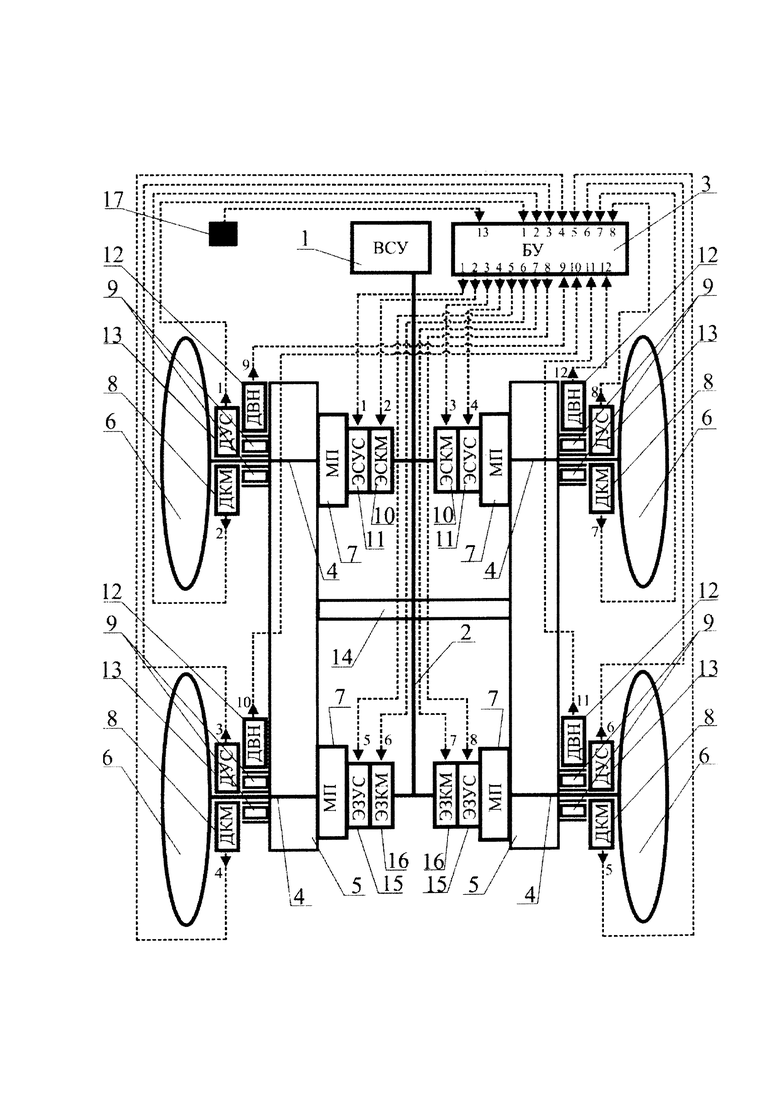
Схема предлагаемой балансирной тележки с приводом на каждое колесо представлена на фиг. , где: 1 - вторичная силовая установка; 2 - силовая магистраль; 3 - блок управления; 4 - приводные валы колес; 5 - балансиры; 6 - колеса; 7 - приводные механизмы колес; 8 - датчики крутящего момента; 9 - подшипники приводных валов; 10 - элементы согласования по крутящему моменту; 11 - элементы согласования по угловой скорости; 12 - датчики вертикальных нагрузок; 13 - датчики угловой скорости; 14 - продольная балка балансира; 15 - элементы задающие угловую скорость; 16 - элементы задающие крутящий момент; 17 - датчик положения педали акселератора.
Предлагаемый привод балансирной тележки работает следующим образом: крутящий момент к заднему левому колесу 6 балансира 5 подается от механизм привода 7, получающего энергию по силовой магистрали 2 от вторичной силовой установки 1, которая преобразует механическую энергию двигателя внутреннего сгорания машины в другой вид энергии. Параметры работы механизма привода 7 заднего левого колеса определяются блоком управления 3 и изменяются через элементы задающие угловую скорость 15 и крутящий момент 16 в зависимости от показания датчика положения педали акселератора 17 транспортного средства и значений внешних усилий, действующих на само колесо и на другие колеса, полученные с датчиков внешних нагрузок 12, крутящих моментов 8 и угловых скоростей 13. Крутящий момент к заднему правому колесу подается аналогично.
К переднему левому колесу 6 балансира 5 крутящий момент подается от механизм привода 7, получающего энергию по силовой магистрали 2 от вторичной силовой установки 1, которая преобразует механическую энергию двигателя внутреннего сгорания транспортного средства в другой вид энергии. Параметры работы механизма привода 7 переднего левого колеса определяются блоком управления 3 и изменяются через элементы согласования угловой скорости 11 и крутящего момента 10 в зависимости от значения внешних усилий, действующих как на само колесо, так и на другие колеса, полученных с датчиков внешних нагрузок 12, крутящих моментов 8 и угловых скоростей 13. Крутящий момент к переднему правому колесу подается аналогично.
Блок управления 3 анализирует полученные значения от датчиков положения педали акселератора 17, вертикальных нагрузок 12, установленных на подшипниках 9 приводных валов 4 переднего левого 6 и заднего левого 6 колес, а также значения угловой скорости и крутящего момента с соответствующих датчиков 13 и 8 заднего левого колеса 6, установленных на вале привода 4, затем определяет (выбирает) необходимое значение угловой скорости и крутящего момента на переднем левом колесе 6 и вырабатывает сигнал управления на элементы согласования 10 и 11. Элемент согласования по угловой скорости 11 будет изменять угловую скорость механизма привода 7 до тех пор, пока угловая скорость переднего левого колеса 6 не примет значение, которое определил (выбрал) блок управления 3. Элемент согласования по крутящему моменту 10 будет изменять крутящий момент механизма привода 7 до тех пор, пока крутящий момент переднего колеса 6 не примет значение, которое определил (выбрал) блок управления 3. Значения угловой скорости и крутящего момента переднего левого колеса 6 определяются соответствующими датчиками 11 и 10, установленными на вале привода 4, и предаются в блок управления 3. Таким образом осуществляется согласованная работа переднего левого 6 и заднего левого 6 колес балансира. Согласованная работа переднего правого и заднего правого колес балансира осуществляется так же.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ ПРИВОД ВЕДУЩИХ КОЛЕС БАЛАНСИРНОГО КОЛЕСНОГО ДВИЖИТЕЛЯ | 2019 |
|
RU2707676C1 |
| Плавающий снегоболотоход на шинах сверхнизкого давления с колесной формулой 8х8 с гидростатической трансмиссией и возможностью автоматического управления крутящими моментами каждого из колес | 2016 |
|
RU2652300C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340472C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА С ПРИВОДОМ НА ЧЕТЫРЕ КОЛЕСА | 2013 |
|
RU2623284C1 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340473C2 |
| БАЛАНСИРНАЯ ТЕЛЕЖКА КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2000 |
|
RU2189911C2 |
| Малогабаритный трактор | 1990 |
|
SU1785922A1 |
| СПОСОБ УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА С ПРИВОДОМ НА ЧЕТЫРЕ КОЛЕСА И УСТРОЙСТВО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ | 2017 |
|
RU2719104C1 |
| ПРИВОД СТАНКОВ-КАЧАЛОК | 2014 |
|
RU2557813C1 |
| КОНТРОЛЛЕР РАЗБЛОКИРОВАНИЯ НЕРЕВЕРСИВНОЙ СИСТЕМЫ ПЕРЕДАЧИ ВРАЩЕНИЯ | 2012 |
|
RU2552771C1 |
Изобретение относится к ходовым системам машин. Балансирная тележка с приводом на каждое колесо, содержит поперечную балку, на концах которой расположены продольные балансиры, и укрепленные на концах балансиров колеса. Дополнительно введены вторичная силовая установка, кинематически связанная с двигателем внутреннего сгорания. Приводные механизмы колес с приводными валами установлены на балансирах и связаны со вторичной силовой установкой. Также имеется блок управления, имеющий тринадцать входов и восемь выходов, датчик положения педали акселератора, датчики угловой скорости, датчики крутящего момента, датчики вертикальных нагрузок, элементы согласования по угловой скорости и крутящему моменту. Повышаются тяговые показатели. 1 ил.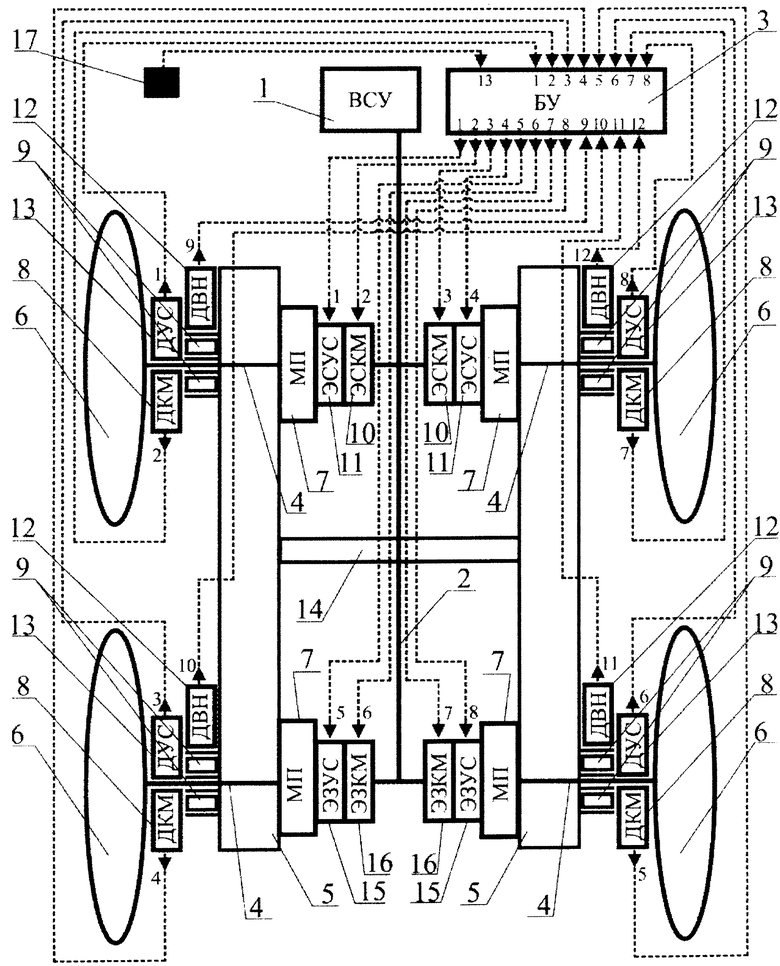
Балансирная тележка с приводом на каждое колесо, включающая поперечную балку, на концах которой расположены продольные балансиры, и укрепленные на концах балансиров колеса, отличающаяся тем, что дополнительно введены вторичная силовая установка, кинематически связанная с двигателем внутреннего сгорания, приводные механизмы колес с приводными валами, установленные на балансирах и связанные со вторичной силовой установкой, блок управления, имеющий тринадцать входов и восемь выходов, датчик положения педали акселератора, связанный с педалью акселератора, выход датчика положения педали акселератора соединен со входом тринадцать блока управления, датчики угловой скорости, установленные на приводных валах каждого из колес, выход датчика угловой скорости переднего левого колеса, выход датчика угловой скорости заднего левого колеса, выход датчика угловой скорости заднего правого колеса и выход датчика угловой скорости переднего правого колеса соединены соответственно с первым, третьим, шестым и восьмым входами блока управления, датчики крутящего момента, установленные на приводных валах каждого из колес, выход датчика крутящего момента переднего левого колеса, выход датчика крутящего момента заднего левого колеса, выход датчика крутящего момента заднего правого колеса и выход датчика крутящего момента переднего правого колеса соединены соответственно со вторым, четвертым, пятым и седьмым входами блока управления, датчики вертикальных нагрузок, установленные на подшипниках приводных валов каждого из колес, выход датчика вертикальных нагрузок переднего левого колеса, выход датчика вертикальных нагрузок заднего левого колеса, выход датчика вертикальных нагрузок заднего правого колеса и выход датчика вертикальных нагрузок переднего правого колеса соединены соответственно с девятым, десятым, одиннадцатым и двенадцатым входами блока управления, элементы согласования по угловой скорости и крутящему моменту, установленные перед приводными механизмами передних колес, первый и четвертый выходы блока управления соединены соответственно со входами элементов согласования по угловой скорости переднего левого и переднего правого колес, второй и третий выходы блока управления соединены соответственно со входами элементов согласования по крутящему моменту переднего левого и переднего правого колес, элементы, задающие угловую скорость и крутящий момент, установленные перед приводными механизмами задних колес, пятый и восьмой выходы блока управления соединены соответственно со входами элементов, задающих угловую скорость заднего левого и заднего правого колес, шестой и седьмой выходы блока управления соединены соответственно со входами элементов, задающих крутящий момент заднего левого и заднего правого колес.
| БАЛАНСИРНАЯ ПОДВЕСКА ЧЕТЫРЁХКОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2666080C1 |
| СПОСОБ УМНОЖЕНИЯ ЧАСТОТЫ | 0 |
|
SU173809A1 |
| Трансмиссия механическая с гидравлическими дифференциальными связями ведущих колес и многорежимной системой электронного управления их блокировкой для автотранспортного средства повышенной проходимости | 2018 |
|
RU2692737C1 |
| Плавающий снегоболотоход на шинах сверхнизкого давления с колесной формулой 8х8 с гидростатической трансмиссией и возможностью автоматического управления крутящими моментами каждого из колес | 2016 |
|
RU2652300C1 |
| БАЛАНСИРНАЯ ПОДВЕСКА | 2008 |
|
RU2385236C1 |
| НЕСИММЕТРИЧНЫЙ БАЛАНСИРНЫЙ ПРИВОД ВЕДУЩИХ КОЛЕС АВТОГРЕЙДЕРА | 2014 |
|
RU2563468C1 |
| СЛЕДЯЩАЯ ФОТОГОЛОВКА ДЛЯ СЧИТЫВАНИЯ, НАПРИМЕР, ЧЕРТЕЖА | 0 |
|
SU185505A1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2340472C2 |

