Область техники изобретения
[0001] Настоящее изобретение относится к способу определения местоположения движущегося объекта в навигационной системе, позволяющему точно определить последующее местоположение объекта с использованием скорости движущегося объекта и направления хорды на цифровой карте, в частности, когда движущийся объект (например, транспортное средство) находится в зоне отсутствия приема сигналов.
Предшествующий уровень техники
[0002] Обычно в навигационной системе информацию о местоположении движущегося объекта обеспечивают непрерывно в режиме реального времени в пределах допустимой погрешности и используют для отображения текущего местоположения движущегося объекта, управления маршрутом движения и распознавания окружающей среды. Однако неточное или периодическое определение местоположения может серьезно повлиять на передвижение движущегося объекта. Следовательно, определение местоположения движущегося объекта очень важно.
[0003] Способ определения местоположения движущегося объекта описан в корейском патенте №216535 (Заявка №1997 - 24564).
[0004] Согласно корейскому патенту №216535 текущее местоположение движущегося объекта определяют методом счисления пути с использованием данных, получаемых от датчика направления и дальности, прикрепленного к движущемуся объекту и задающего первое местоположение в движении. По хорде на цифровой карте осуществляют коррекцию картографическим методом с сопоставлением первого местоположения в движении с данными на карте и принимают скорректированное местоположение в качестве второго местоположения в движении. Текущее местоположение в движении определяют с использованием информации о местоположении, получаемой от GPS (GPS - сокращ. от Global Positioning System - глобальная спутниковая система определения местоположения, примеч. перев.), и принимают в качестве третьего местоположения в движении. По хорде на цифровой карте осуществляют коррекцию обзорно-сравнительным методом с сопоставлением местоположения с данными на карте и принимают третье местоположение в качестве четвертого местоположения в движении. Находят схемы движения на короткие расстояния для четырех местоположений в движении и сравнивают между собой сходные признаки, показывающие, насколько схемы движения на короткие расстояния для четырех местоположений согласуются со схемой хорд. Местоположение в движении, обладающее наибольшим сходством, определяют в качестве окончательного текущего местоположения.
[0005] При таком способе определения местоположение движущегося объекта определяют методом счисления пути с использованием сигнала датчика и данных о местоположении, полученных от GPS.
[0006] Без использования метода счисления пути датчики направления, такие как гироскопический и электронный компасы, могут иметь погрешности, зависящие от направления поворота. В направлении движения могут быть отклонения или изменения, возникающие при остановке движущегося объекта. Следовательно, расчетное направление движения может содержать погрешность. Определение пройденного расстояния с помощью колесных датчиков имеет погрешности, вызванные внешними факторами, такими как давление воздуха и условия на улице. Поэтому очень трудно избежать нестабильности при определении местоположения и обеспечить помощь в навигации, такую как отображение местоположения на карте в зонах отсутствия приема сигналов GPS с помощью навигационной системы без какого-либо датчика направления.
[0007] Нелегко определить местоположение такого движущегося объекта, как мобильный телефон, который не имеет датчиков направления, подобных гироскопическому и электронному компасам, а также движущихся объектов, находящихся в зонах отсутствия приема сигналов, где данные GPS не принимаются, или в зонах ненадежного приема, наподобие туннелей и подземных переходов, в которых качество данных о местоположении, полученных от GPS, резко снижается, хотя такие данные и получают. Очень трудно точно определить местоположение движущегося объекта из-за погрешностей, возникающих в процессе определения, даже если местоположение движущегося объекта и может быть определено.
Краткое изложение сущности изобретения
[0008] Соответственно настоящее изобретение представляет собой способ определения местоположения движущегося объекта с помощью навигационной системы, позволяющий по существу решить одну или более проблем, связанных с ограничениями и недостатками существующих средств.
[0009] Целью настоящего изобретения является создание способа определения местоположения движущегося объекта в навигационной системе, позволяющего точно определить местоположение движущегося объекта, используя скорость движущегося объекта и цифровую карту, в зонах отсутствия приема сигналов GPS о местоположении, таких, например, как туннель или подземный переход.
[0010] Другой целью настоящего изобретения является создание способа определения местоположения движущегося объекта с помощью навигационной системы, позволяющего точно определить местоположение движущегося объекта по его скорости применительно к недорогим движущимся объектам, не имеющим датчиков направления, таких как гироскопический и электронный компасы для систем счисления пути в зонах отсутствия приема сигналов GPS.
[0011] Дополнительные преимущества, цели и признаки изобретения будут частью изложены в описании, которое приводится ниже, а частью будут очевидны после изучения нижеследующего или после практического применения настоящего изобретения. Цели и другие преимущества изобретения могут быть реализованы и достигнуты в структуре, особо выделенной в описании и формуле изобретения, а также в прилагаемых чертежах.
[0012] Для достижения этих целей и иных преимуществ, а также в соответствии с целью настоящего изобретения, воплощенного в примерах осуществления и в общих чертах описанного ниже, способ определения местоположения движущегося объекта в навигационной системе включает операции: (а) получение данных GPS о местоположении от движущегося объекта; (b) определение зоны отсутствия приема сигналов GPS с использованием полученных данных GPS о местоположении; (с) вычисление дистанции прямолинейного перемещения движущегося объекта по последним данным GPS о местоположении в зонах приема сигналов, когда движущийся объект находится в зоне отсутствия приема сигналов GPS; (d) определение данных виртуального местоположения с использованием вычисленной дистанции прямолинейного перемещения движущегося объекта; и (е) определение на цифровой карте расчетного местоположения, ближайшего по своим данным к виртуальному местоположению, и осуществление согласования с картой для навигационного обеспечения.
[0013] Согласно другому аспекту настоящего изобретения способ определения местоположения движущегося объекта в навигационной системе включает следующие операции: (а) получение данных GPS о местоположении; (b) определение зоны отсутствия приема сигналов GPS с использованием полученных данных GPS о местоположении; (с) получение результата согласования с картой значения последних данных GPS о местоположении в зонах приема сигналов, когда движущийся объект находится в зоне отсутствия приема сигналов GPS, и вычисление дистанции прямолинейного перемещения движущегося объекта относительно результата согласования с картой; (d) нахождение интерполированных точек и хорды местоположения, принятых в качестве вычисленной дистанции прямолинейного перемещения движущегося объекта; (е) уточнение нахождения движущегося объекта на найденной хорде; и (f) определение местоположения в движении с использованием остатка длины хорды, координат интерполированной точки, скорости движущегося объекта и длины хорды, если движущийся объект находится на найденной хорде.
[0014] В настоящем изобретении местоположение движущегося объекта в зоне отсутствия приема сигналов более точно определяют при использовании таких параметров, как скорость движущегося объекта, направляющегося в зону отсутствия приема сигналов, направление хорды в последнем местоположении, согласованном с цифровой картой, а также хорда и интерполированная точка на цифровой карте.
[0015] Необходимо понимать, что как вышеприведенное общее описание, так и нижеследующее подробное описание настоящего изобретения являются примерными и поясняющими и предназначены для дальнейшего объяснения настоящего изобретения в соответствии с формулой изобретения.
Краткое описание чертежей
[0016] Чертежи, прилагаемые для более ясного понимания сущности изобретения и включенные в состав данной заявки, иллюстрируют примеры осуществления изобретения и вместе с настоящим описанием служат для объяснения его принципов. На чертежах изображено:
[0017] на фиг.1 - навигационная система в соответствии с настоящим изобретением;
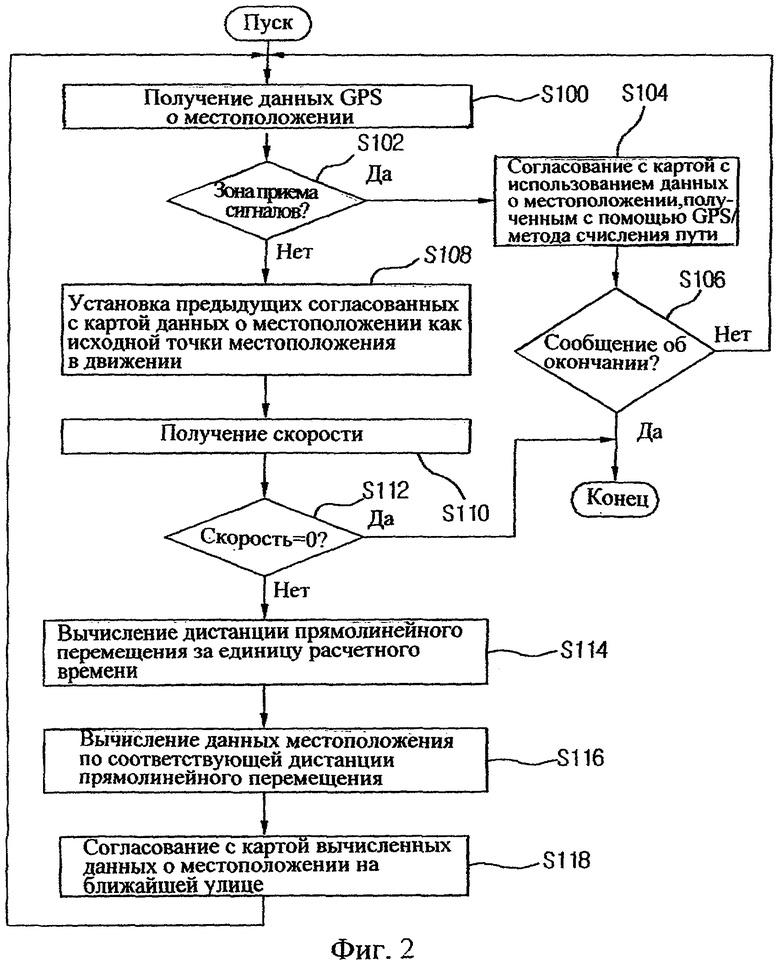
[0018] на фиг.2 - блок-схема, поясняющая способ определения местоположения движущегося объекта в навигационной системе согласно первому примеру осуществления настоящего изобретения;
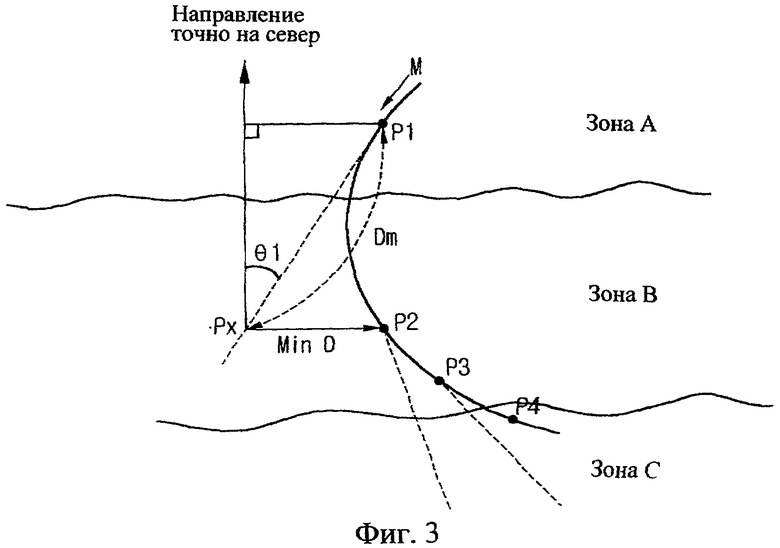
[0019] на фиг.3 - схема примерного процесса определения местоположения движущегося объекта согласно способу определения местоположения движущегося объекта, показанному на фиг.2;
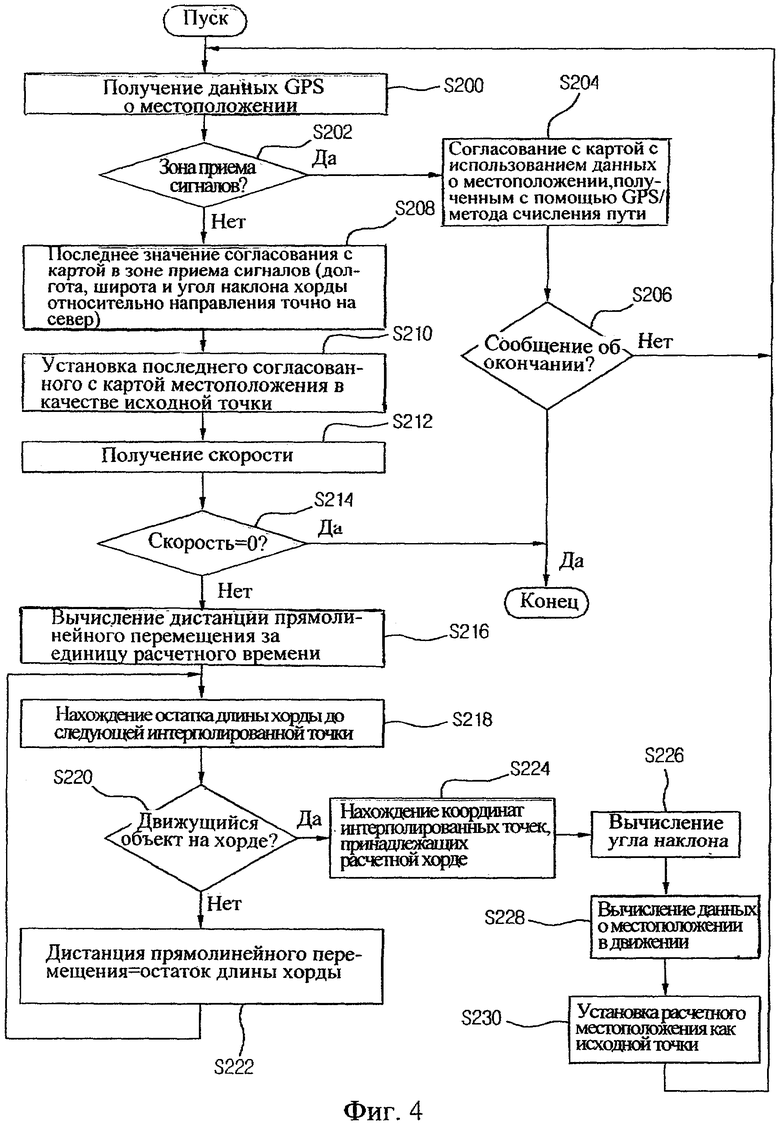
[0020] на фиг.4 - блок-схема, поясняющая способ определения местоположения движущегося объекта в навигационной системе согласно второму примеру осуществления настоящего изобретения; и
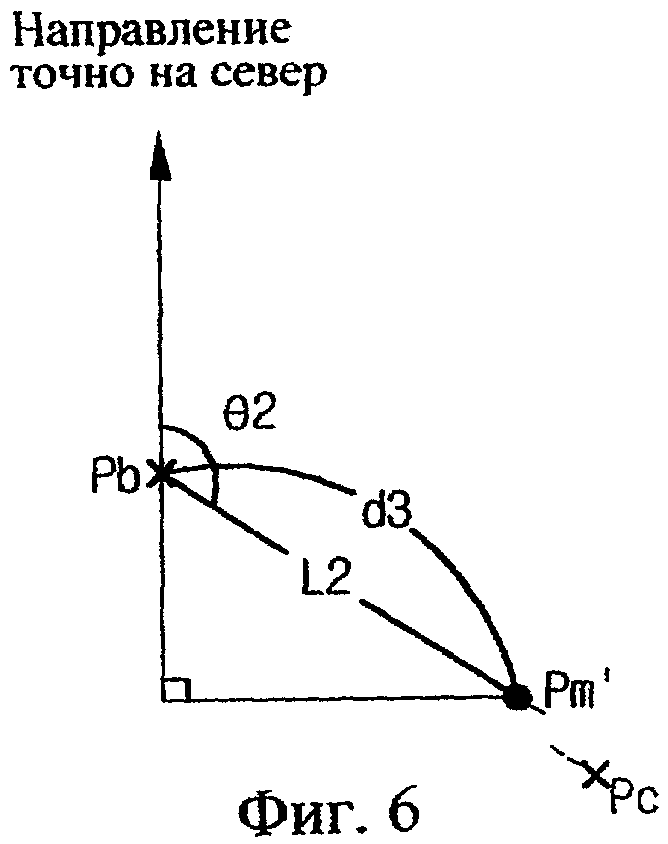
[0021] на фиг.5 и 6 - иллюстрации, поясняющие второй пример осуществления настоящего изобретения.
Подробное описание изобретения
[0022] Далее следует подробное рассмотрение предпочтительных примеров осуществления настоящего изобретения со ссылками на прилагаемые чертежи. По мере возможности, те же самые номера позиций будут использоваться на всех чертежах в отношении одних и тех же или подобных деталей.
[0023] Далее будет описана навигационная система согласно настоящему изобретению.
[0024] Фиг.1 иллюстрирует навигационную систему, выполненную согласно настоящему изобретению.
[0025] Как показано на фиг.1, навигационная система включает:
GPS-приемник 102 для получения данных о местоположении от трех или более спутников GPS 100 с помощью антенны АНТ; датчик 104 для определения пройденного расстояния и скорости движущегося объекта; блок ввода 106 для получения пункта назначения движущегося объекта от пользователя;
запоминающее устройство для картографических данных 108 с целью хранения картографических данных на носителе, например компакт-диске; основной блок управления 110 для определения текущего местоположения движущегося объекта по полученному сигналу GPS-приемника 102, получения пункта назначения с помощью блока ввода 106, установки и запоминания маршрута движения до пункта назначения от текущего местоположения движущегося объекта относительно картографических данных, хранящихся в запоминающем устройстве 108, установки направляющего объекта, расположенного на маршруте движения и контроля функции направления маршрута движения в месте расположения направляющего объекта; дисплей 112 для отображения текущего местоположения движущегося объекта вместе с картографическими данными на экране 114 в соответствии с управляющим воздействием основного блока управления 110; и блок речевого управления 116 для управления маршрутом движущегося объекта по речевому сигналу, подаваемому через громкоговоритель 118, управляемый от основного блока управления 110.
[0026] Сначала GPS-приемник 102 получает заданные данные о местоположении от множества спутников GPS 100 и передает эти данные в основной блок управления 110 для использования в навигационном обеспечении. Датчик 104 определяет скорость движущегося объекта и пройденное им расстояние и передает их в основной блок управления 110.
[0027] Основной блок управления 110 определяет текущее местоположение движущегося объекта по полученному сигналу GPS-приемника 102 и сопоставляет определенное текущее местоположение движущегося объекта с картографическими данными, хранящимися в запоминающем устройстве для картографических данных 108. Когда движущийся объект перемещается из текущего местоположения в зону отсутствия приема сигналов, датчик 104 вычисляет дистанцию прямолинейного перемещения, которую движущийся объект может пройти, чтобы определить следующее местоположение движущегося объекта.
[0028] Другими словами, когда есть возможность создать обеспечение, позволяющее управлять маршрутом движущегося объекта и сообщать информацию о текущем местоположении в соответствии с перемещением движущегося объекта с использованием полученного сигнала GPS-приемника 102, такое обеспечение создают путем определения расстояния, которое нужно пройти. Для этого при входе движущегося объекта в зону отсутствия приема сигналов вычисляют расстояние, пройденное движущимся объектом, и определяют следующее местоположение движущегося объекта в зоне отсутствия приема сигналов с использованием скорости и расстояния, пройденного движущимся объектом, и угла хорды относительно последнего местоположения движущегося объекта в зоне приема сигналов.
[0029] При введении пользователем движущегося объекта пункта назначения с помощью блока ввода 106 основной блок управления 110 обращается к картографическим данным, хранящимся в запоминающем устройстве для картографических данных 108, осуществляет поиск маршрута движения от текущего местоположения движущегося объекта до пункта назначения и управляет маршрутом движения движущегося объекта путем отображения найденного маршрута движения на экране 114 дисплея 112 и одновременной подачи через громкоговоритель 118 речевого сигнала управления с помощью блока речевого управления 116.
[0030] Далее будет описан способ определения местоположения движущегося объекта с помощью навигационной системы согласно настоящему изобретению.
[0031] <Первый пример осуществления изобретения>
[0032] Фиг.2 и 3 иллюстрируют первый пример осуществления настоящего изобретения.
[0033] Как показано на фиг.2, движущийся объект в основном получает данные GPS о местоположении от множества спутников GPS с помощью GPS-приемников (S100) и определяет, находится ли движущийся объект в зоне приема сигналов или в зоне отсутствия приема сигналов, с использованием для этого данных GPS о местоположении, полученных с помощью GPS-приемника (S102).
[0034] В данном случае критерием, определяющим нахождение движущегося объекта в зоне приема или в зоне отсутствия приема сигналов GPS с данными о местоположении, является величина, характеризующая достоверность полученных данных GPS о местоположении. Данную величину, характеризующую достоверность полученных данных GPS о местоположении, вычисляют как код горизонтального фактора снижения точности (ГФСТ) с использованием расчетного алгоритма в формате NMEA-0283. Вычисленный код ГФСТ сравнивают с заданной величиной. Если при сравнении ГФСТ оказывается меньше заданной величины, то зону определяют как зону приема сигналов. Если ГФСТ больше или равен заданной величине, то зону определяют как зону отсутствия приема сигналов.
[0035] Если согласно результату определения на шаге S102 движущийся объект находится в зоне приема сигналов GPS о местоположении, то с использованием данных о местоположении, полученных с помощью GPS, и метода счисления пути осуществляют картографирование и навигационное обеспечение (S104). После этого процесс завершают или переходят к шагу S100 в соответствии с передачей пользователем сообщения об окончании, а данные GPS о текущем местоположении, куда передвинулся движущийся объект, принимают и осуществляют навигационное обеспечение с использованием полученных данных GPS о местоположении (S106).
[0036] Однако если согласно результату определения на шаге S102 движущийся объект находится в зоне отсутствия приема сигналов GPS о местоположении, то предыдущие согласованные с картой данные о местоположении движущегося объекта принимают за исходную точку местоположения движущегося объекта (S108). Текущую скорость вводят от датчика (S110).
[0037] После этого определяют, равна ли скорость движущегося объекта нулю (S112). Если согласно результату определения скорость движущегося объекта равна нулю, считают, что движущийся объект остановился, и процесс завершают. Если скорость движущегося объекта не равна нулю, считают, что движущийся объект передвигается в зоне приема сигналов, и тогда вычисляют дистанцию прямолинейного перемещения, проходимую за единицу расчетного времени (S114). Например, если расчетное время равно 1 секунде, а текущая скорость движущегося объекта равна 30 м/с, дистанция прямолинейного перемещения, которую движущийся объект может пройти в направлении движения, равна 30 метрам за секунду. Направление прямолинейного перемещения определяют по взятому относительно направления точно на север углу наклона хорды, расположенной в направлении движения в последнем согласованном с картой местоположении в зоне приема сигналов.
[0038] Если дистанцию прямолинейного перемещения вычисляют за расчетное время (S114), то соответствующие данные местоположения (долгота, широта), отстоящего от последнего согласованного с картой местоположения (исходной точки) в зоне приема сигналов, будут вычислять по уравнению 1 (S116) с учетом расстояния прямолинейного перемещения. Предыдущие согласованные с картой координаты (долгота, широта) являются долготой и широтой последнего согласованного с картой местоположения перед входом движущегося объекта в зону отсутствия приема сигналов.
[0039] [Уравнение 1]
Долгота = долгота предыдущей согласованной с картой координаты + скорость движущегося объекта · cos (угол наклона предыдущего согласованного с картой местоположения) · время (с);
Широта = широта предыдущей согласованной с картой координаты + дистанция прямолинейного перемещения движущегося объекта · sin (угол наклона предыдущего согласованного с картой местоположения),
где дистанция прямолинейного перемещения движущегося объекта = скорость движущегося объекта · время (с), а угол предыдущего согласованного с картой местоположения получают как угол между направлением точно на север и продолжением предыдущей согласованной с картой хорды.
[0040] Аналогично, если данные о местоположении (то есть виртуальном местоположении) на дистанции прямолинейного перемещения движущегося объекта определяли от исходной точки, то они и являются согласованными с картой на кратчайшем расстоянии по цифровой карте в соответствии с данными о местоположении (S118). Иными словами, данные о действительном местоположении движущегося объекта сводятся к местоположению расчетной дистанции прямолинейного перемещения, дороге на цифровой карте и кратчайшему расстоянию и согласованию с картой, так что можно определить следующее местоположение движущегося объекта.
[0041] Определяют, находится ли движущийся объект в зоне отсутствия приема сигналов GPS о местоположении. Если движущийся объект находится в зоне отсутствия приема сигналов GPS о местоположении, дистанцию прямолинейного перемещения вычисляют по скорости движущегося объекта относительно данных о местоположении, полученных на шаге S118. Данные о виртуальном местоположении получают с использованием угла наклона хорды к направлению точно на север, принимаемого за базу отсчета, и согласования с картой местоположения кратчайшего расстояния с тем, чтобы получить данные о втором местоположении, а затем по ним получить данные третьего местоположения.
[0042] Например, как показано на фиг.4, если движущийся объект М перемещается через зону приема сигналов А, зону отсутствия приема сигналов В, такую как туннель, и зону приема сигналов С по своему направлению движения, то первое местоположение Р1, согласованное с картой последним в зоне приема сигналов А, принимают за базу отсчета, когда движущийся объект входит в зону отсутствия приема сигналов В.
[0043] Предположим, что скорость движущегося объекта, определяемая датчиком, равна 10 м/с, тогда расстояние Dm между первым местоположением Р1 и произвольно перемещающимся местоположением Рх, являющимся продолжением первого местоположения Р1 по прямой, равно 10 м. В данном случае единица расчетного времени равна 1 с.
[0044] Данные о местоположении перемещающегося местоположения Рх, отстоящего от первого местоположения на дистанцию прямолинейного перемещения, можно вычислить с помощью уравнения 2.
[0045] [Уравнение 2]
Долгота = долгота Р1+10 м·cos(Θ1 для Р1)
Широта = широта Р1+10 м·sin(Θ1 для Р1)
где Θ1 - взятый от направления точно на север угол наклона хорды, расположенной на продолжении направления движения движущегося объекта в первом местоположении и угол наклона предыдущего согласованного с картой местоположения.
[0046] Следует отметить, что уравнение 2 аналогично уравнению 1.
[0047] Если вычисляют данные о местоположении для произвольно определенного местоположения, то второе местоположение Р2 на цифровой карте, то есть кратчайшее расстояние Min D (мин. D) от местоположения, упомянутого первым, является согласованным с картой местоположением, и уже согласованное с картой местоположение Р2 определяют как местоположение, к которому движущийся объект перемещался за расчетную единицу времени.
[0048] Принимая согласованное с картой второе местоположение Р2 в качестве исходного, определяют третье местоположение, используя координаты второго местоположения, дистанцию прямолинейного перемещения, пройденную за расчетное время, и угол наклона хорды второго местоположения относительно направления точно на север. Эту операцию осуществляют шаг за шагом в соответствии с кодом ГФСТ, передаваемым от спутника GPS до тех пор, пока движущийся объект не распознает зону С надежного приема данных о местоположении со спутников GPS.
[0049] <Второй пример осуществления изобретения>
[0050] Фиг.4-6 иллюстрируют второй пример осуществления настоящего изобретения.
[0051] Как показано на фиг.4, движущийся объект в основном получает данные GPS о местоположении от множества спутников GPS (S200) и определяет, находится ли движущийся объект в зоне приема сигналов или в зоне отсутствия приема сигналов с использованием полученных данных GPS о местоположении (S202).
[0052] В данном примере осуществления изобретения реализован способ движения с целью установления нахождения движущегося объекта в зоне приема сигналов или в зоне отсутствия приема сигналов путем использования данных GPS о местоположении, полученных от GPS. Например, код ГФСТ (горизонтального фактора снижения точности) вычисляют с помощью расчетного алгоритма в формате NMEA-0283. Если ГФСТ меньше заданной величины, считают, что движущийся объект находится в зоне приема сигналов. Если ГФСТ больше или равно заданной величине, считают, что движущийся объект находится в зоне отсутствия приема сигналов.
[0053] Если движущийся объект находится в зоне приема сигналов GPS о местоположении, местоположение движущегося объекта фиксируют на улице, показанной на цифровой карте, с использованием данных о местоположении, полученных от GPS и методом счисления пути, и осуществляют навигационное обеспечение (S204). Если пользователь вводит сообщение об окончании работы, навигационное обеспечение прекращается (S206).
[0054] С другой стороны, если движущийся объект находится в зоне отсутствия приема сигналов GPS о местоположении, как это было определено на шаге S202, то получают последние согласованные с картой значения данных GPS о местоположении (S208). Здесь последними согласованными с картой величинами являются координаты (долгота, широта), соответствующие данным GPS о местоположении, и взятый относительно направления точно на север угол наклона соответствующей согласованной с картой хорды, по которому можно установить направление движения движущегося объекта.
[0055] Последнее согласованное с картой местоположение для данных GPS о местоположении в зоне приема сигналов принимают в качестве исходного для определения местоположения движущегося объекта в зоне отсутствия приема сигналов (S210).
[0056] Затем измеряют скорость движущегося объекта и определяют, равна ли текущая скорость движущегося объекта нулю (S214). Если согласно результату определения скорость движущегося объекта равна нулю, считают, что движущийся объект остановился, и процесс завершают. Однако, если скорость движущегося объекта не равна нулю, то вычисляют дистанцию прямолинейного перемещения в течение заданной расчетной единицы времени (S216). Находят и, соответственно, определяют интерполированную точку и хорду на вычисленной дистанции прямолинейного перемещения и находят остаток длины хорды (S218).
[0057] В частности, как показано на фиг.5, если движущийся объект М перемещается через зону приема сигналов А, зону отсутствия приема сигналов В и зону приема сигналов С в направлении движения движущегося объекта, вычисляют длину (d1+d2=Ld1) хорды L1 между произвольными интерполированными точками Ра и Pb, расположенными в направлении движения движущегося объекта (Pm->Pm′), и расстояние между предыдущей интерполированной точкой Ра и исходной точкой Pm вычитают (Ld1-d1=d2) из длины (d1+d2) хорды, чтобы получить остаток длины (d2) хорды. В данном случае остаток длины (d2) хорды представляет собой расстояние от опорной точки Pm до интерполированной точки Pb и служит критерием для определения, находится ли движущийся объект на хорде L1 или между двумя интерполированными точками Ра и Pb. Здесь две интерполированные точки соединены хордой, а интерполированная точка - это точка, принадлежащая двум хордам. Длина хорды - это расстояние между интерполированными точками, а остаток длины хорды равен расстоянию между интерполированными точками, или может быть как больше нуля, так и равен нулю.
[0058] Определяют, находится ли движущийся объект Pm', перемещающийся в зоне В, на хорде L1 (S220). Иначе говоря, остаток длины d2 хорды сравнивают с дистанцией прямолинейного перемещения d2+d3 движущегося объекта. Если остаток длины d2 хорды больше или равен дистанции прямолинейного перемещения d2+d3 движущегося объекта, считают, что движущийся объект М находится на соответствующей хорде L1. Если остаток длины d2 хорды меньше дистанции прямолинейного перемещения d2+d3 движущегося объекта, считают, что движущийся объект М находится не на соответствующей хорде L1, а на другой хорде, то есть L2, или используют другие интерполированные точки, Pb и Рс, чтобы можно было четко определить, находится ли движущийся объект на следующей хорде L2.
[0059] Если движущийся объект не находится на хорде, величину, получаемую вычитанием остатка длины d2 хорды из дистанции прямолинейного перемещения (=d2+d3), принимают в качестве остатка дистанции прямолинейного перемещения (=d3) движущегося объекта (S222). Иначе говоря, вычисляют дистанцию прямолинейного перемещения (= дистанция прямолинейного перемещения - остаток длины хорды) и осуществляют переход к шагу S218. Определяют интерполированные точки Pb и Рс в вычисленном остатке дистанции прямолинейного перемещения d3 и другую хорду L2 и находят расстояние до интерполированных точек Pb и Рс (S218). Расстояние до следующей интерполированной точки соответствует длине (Ld2) хорды, соединяющей интерполированные точки Pb и Рс, которые не являются исходными точками.
[0060] Определяют, находится ли движущийся объект на следующей хорде L2 (S220). Другими словами, остаток дистанции прямолинейного перемещения (d3) движущегося объекта сравнивают с длиной (Ld2) новой хорды. Если длина (Ld2) следующей хорды больше или равна остатку дистанции прямолинейного перемещения (d3) движущегося объекта, считают, что движущийся объект находится на соответствующей хорде. Однако, если движущийся объект не находится на соответствующей хорде, то вновь определяют, находится ли движущийся объект на другой хорде в остатке дистанции прямолинейного перемещения движущегося объекта, т.е. полученном путем вычитания остатка длины соответствующей хорды, как описано выше.
[0061] Если установлено, что движущийся объект находится на определяемой хорде L2, то находят данные о местоположении (координаты) интерполированных точек Pb и Рс, принадлежащих соответствующей хорде Ld2, и вычисляют координаты найденных интерполированных точек и угла наклона определяемой хорды (S216).
[0062] Находят две интерполированные точки Pb и Рс, принадлежащие хорде L2, на которой определяют местоположение движущегося объекта, например, предыдущую интерполированную точку Pb, лежащую на переднем конце хорды в направлении движения движущегося объекта, и последующую интерполированную точку Рс, лежащую на заднем конце хорды в направлении передвижения движущегося объекта. Вычисляют соответствующие данные о местоположении (долготу, широту) по уравнению 3 с использованием соответствующих координат положения предыдущей и последующей интерполированных точек, угол наклона хорды и скорость движущегося объекта.
[0063] [Уравнение 3]
Долгота = долгота предыдущей интерполированной точки + скорость движущегося объекта · sin (угол наклона хорды) · время (с)
Широта = широта предыдущей интерполированной точки+скорость движущегося объекта · cos (угол наклона хорды) · время (с),
где долготу и широту в определяемых данных можно получить из долготы и широты последующей интерполированной точки при движении в обратном направлении.
[0064] Данные движущегося объекта о местоположении в движении в зоне отсутствия приема сигналов можно рассчитать, используя координаты интерполированных точек, остаток дистанции прямолинейного перемещения (d3) движущегося объекта, длины (Ld2) хорды и угла наклона (Θ2) хорды (S228). Полученные расчетные данные о местоположении принимают в качестве исходных для определения другого местоположения в движении (S230), так что можно определить местоположение при передвижении движущегося объекта в зоне отсутствия приема сигналов, используя скорость в течение другого времени определения, дистанцию прямолинейного перемещения, расчетные интерполированную точку и хорду и угол наклона расчетной хорды.
[0065] Более подробно настоящее изобретение будет описано ниже со ссылками на фиг.5 и 6.
[0066] Как показано на фиг.5 и 6, если движущийся объект М перемещается из зоны приема сигналов А в зону отсутствия приема сигналов В, первая интерполированная точка Ра находится в зоне приема сигналов А, а вторая интерполированная точка Pb находится в зоне отсутствия приема сигналов В. Третья интерполированная точка Рс находится в зоне приема сигналов С. Это тот случай, когда движущийся объект перемещается в зону отсутствия приема сигналов (Pm->Pm′). Первая хорда (L1), соединяющая первую интерполированную точку Ра и вторую интерполированную точку Pb, вторая хорда (L2), соединяющая вторую интерполированную точку Pb и третью интерполированную точку Рс, координаты интерполированных точек Ра, Pb и Рс и длины (Ld1 и Ld2) хорд L1 и L2 структурированы таким образом, чтобы служить базой данных на цифровой карте.
[0067] Следовательно, когда движущийся объект попадает в зону отсутствия приема сигналов В, получают последнее согласованное с картой местоположение Pm в зоне приема сигналов и принимают его в качестве исходной точки. Определяют дистанцию прямолинейного перемещения, которую может пройти движущийся объект (Pm->Pm') за единицу времени. Часть длины хорды (d1) от исходной точки Pm движущегося объекта до первой интерполированной точки Ра вычитают из длины (Ld1) первой хорды L1 для получения остатка длины (d2) первой хорды. Остаток длины (d2) первой хорды сравнивают с дистанцией прямолинейного перемещения (d2+d3) движущегося объекта, так что можно определить, находится ли расчетное местоположение движущегося объекта на первой хорде.
[0068] Если движущийся объект не находится на первой хорде, остаток длины (d2) первой хорды вычитают из дистанции прямолинейного перемещения (d2+d3) движущегося объекта, чтобы получить остаток дистанции прямолинейного перемещения (d3). Получают вторую хорду Ld2, соединенную со второй интерполированной точкой Pb, и третью интерполированную точку Рс, являющуюся концом второй хорды Ld2. Остаток дистанции прямолинейного перемещения (d3) сравнивают с длиной (Ld2) второй хорды L2. Если длина (Ld2) второй хорды L2 больше или равна остатку дистанции прямолинейного перемещения (d3), считают, что движущийся объект Pm' находится на второй хорде L2.
[0069] Затем данные о местоположении движущегося объекта вычисляют, используя остаток дистанции (d3) движения движущегося объекта Pm', длину (Ld2) расчетной второй хорды, координаты второй и третьей интерполированных точек Pb и Рс и угол наклона второй хорды относительно направления точно на север, как показано на фиг.6. Теперь расчетное местоположение принимают за исходную точку.
[0070] Иными словами, если предположить, что длина первой хорды, длина второй хорды и расстояние от первой интерполированной точки до последнего согласованного с картой местоположения равны 5 м, 8 м и 2 м соответственно, а скорость движущегося объекта равна 10 м/с, то расстояние между последним согласованным с картой местоположением и второй интерполированной точкой равно d2=5м-2м=3м. Поскольку d2 (=3 м) меньше, чем дистанция прямолинейного перемещения (10 м), определяют, находится ли движущийся объект на другой хорде с остатком дистанции прямолинейного перемещения (=d3), полученным путем вычитания остатка длины (d2) первой хорды L1.
[0071] Поскольку остаток дистанции перемещения (d3=7 м) меньше, чем длина (8 м) второй хорды, определяют, находится ли движущийся объект Pm' на второй хорде. Для этого находят координаты соответствующих интерполированных точек, а именно второй интерполированной точки Pb и третьей интерполированной точки Рс, принадлежащих второй хорде L2. Вычисляют соответствующие данные о местоположении (долготу, широту) движущегося объекта, используя соответствующие координаты найденных интерполированных точек, угол наклона второй хорды L2 и скорость движущегося объекта. Метод вычисления будет описан подробно со ссылкой на фиг.6.
[0072] Как показано на фиг.6, остаток дистанции (d3), который движущийся объект проходит от второй интерполированной точки Pb, вычисляют, используя скорость движущегося объекта во второй интерполированной точке Pb. Вычисляют угол Θ2 между направлением точно на север и второй хордой L2. Соответствующие данные о местоположении (долгота, широта) вычисляют подстановкой вычисленных дистанции (d3) и угла наклона в [Уравнение 4] следующим образом.
[0073] [Уравнение 4]
Долгота = долгота Pb + дистанция перемещения (d3)·cos(Θ2);
Широта = широта Рс + дистанция перемещения (d3)·sin(Θ2),
причем расчет можно осуществлять относительно третьей интерполированной точки Рс, имеющей иные данные и местоположение по сравнению со второй интерполированной точкой Pb.
[0074] Аналогичным образом в настоящем изобретении при расчете местоположения движущегося объекта в процессе его перемещения из зоны приема сигналов в зону отсутствия приема сигналов местоположение движущегося объекта, перемещающегося в зону отсутствия приема сигналов, можно рассчитать поэтапно, используя такие параметры, как данные о последнем согласованном с картой местоположении в зоне приема сигналов, угол наклона хорды, скорость движущегося объекта, интерполированные точки и длина хорды.
[0075] Как изложено выше, согласно способу по настоящему изобретению местоположение движущегося объекта рассчитывают, используя такие параметры, как дистанция перемещения согласно скорости, длина хорды, угол наклона, интерполированные точки относительно данных о последнем согласованном с картой местоположении в зоне отсутствия приема сигналов, вследствие чего может быть улучшена надежность работы навигационной системы.
[0076] Местоположение движущегося объекта в зоне отсутствия приема сигналов можно точно рассчитать, используя скорость движущегося объекта и цифровую карту. Для недорогого движущегося объекта, не имеющего датчика направления, например гироскопического или электронного компаса для счисления пути в зоне отсутствия приема сигналов, можно точно рассчитать местоположение движущегося объекта, используя скорость движущегося объекта.
[0077] Специалистам очевидно, что настоящее изобретение может иметь различные доработки и изменения. Поэтому предполагается, что настоящее изобретение охватывает различные доработки и изменения, если они входят в объем нижеприведенной формулы изобретения или эквивалентных признаков.

Группа изобретений относится к области регулирования движения транспортных средств. Способ определения местоположения движущегося объекта в навигационной системе включает операции: (а) получение данных GPS о местоположении от движущегося объекта; (b) определение зоны отсутствия приема сигналов GPS с использованием полученных данных GPS о местоположении; (с) вычисление дистанции прямолинейного перемещения движущегося объекта относительно последних данных GPS о местоположении в зонах приема сигналов, когда движущийся объект находится в зоне отсутствия приема сигналов GPS; (d) вычисление данных виртуального местоположения с использованием вычисленной дистанции прямолинейного перемещения движущегося объекта; и (е) вычисление на цифровой карте расчетного местоположения, ближайшего по своим данным к виртуальному положению, и осуществление согласования с картой для навигационного обеспечения. Группа изобретений позволяет точно определить местоположение объекта в зоне отсутствия приема сигналов GPS при осуществлении навигационного обеспечения. 2 н. и 12 з.п. ф-лы, 6 ил.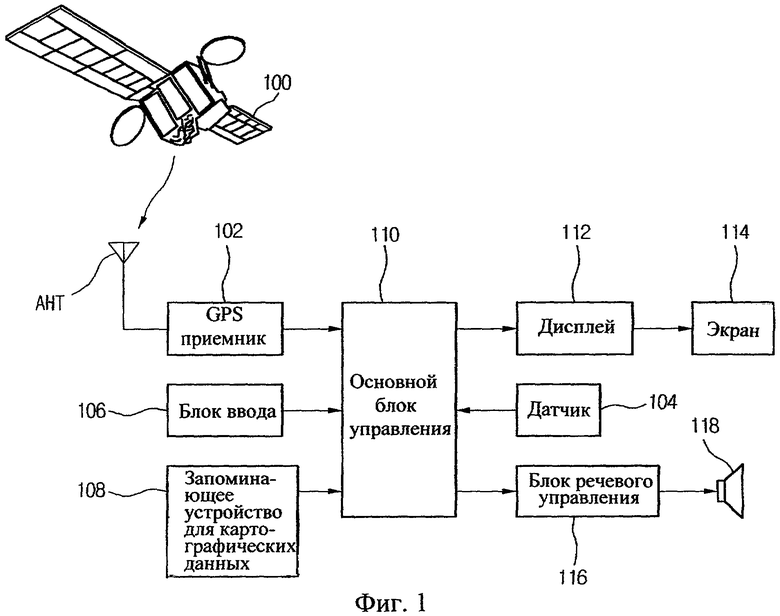
(a) получение данных GPS о местоположении от движущегося объекта;
(b) определение зоны отсутствия приема сигналов GPS с использованием полученных данных GPS о местоположении;
(c) вычисление дистанции прямолинейного перемещения движущегося объекта относительно последних данных GPS о местоположении в зоне приема сигналов, когда движущийся объект находится в зоне отсутствия приема сигналов GPS;
(d) вычисление данных о виртуальном местоположении с использованием вычисленной дистанции прямолинейного перемещения движущегося объекта;
(e) вычисление на цифровой карте расчетного местоположения, ближайшего по своим данным к виртуальному местоположению, и осуществление согласования с картой для навигационного обеспечения.
(b-1) вычисление значения, идентифицирующего достоверность данных GPS о местоположении с использованием данных GPS о местоположении от множества спутников GPS;
(b-2) сравнение вычисленного идентифицирующего значения с заданным значением;
(b-3) если идентифицирующее значение больше или равно заданному значению, считают, что местоположение движущегося объекта находится в зоне отсутствия приема сигналов, а если идентифицирующее значение меньше заданного значения, считают, что движущийся объект находится в зоне приема сигналов.
долгота = долгота предыдущего согласованного с картой местоположения + скорость движущегося объекта · cos (угол наклона предыдущего согласованного с картой местоположения) · время (с), и
широта = широта предыдущего согласованного с картой местоположения + скорость движущегося объекта · sin (угол наклона предыдущего согласованного с картой местоположения) · время (с).
(a) получение данных GPS о местоположении;
(b) определение зоны отсутствия приема сигналов GPS с использованием полученных данных GPS о местоположении;
(c) получение согласованных с картой значений последних данных GPS о местоположении в зонах приема сигналов, когда движущийся объект находится в зоне отсутствия приема сигналов GPS, и вычисление дистанции прямолинейного перемещения движущегося объекта относительно согласованных с картой значений;
(d) нахождение интерполированных точек и хорды расчетного местоположения с использованием вычисленной дистанции прямолинейного перемещения движущегося объекта;
(e) уточнение нахождения движущегося объекта на найденной хорде;
(f) определение местоположения в движении с использованием остатка длины хорды, координат интерполированной точки, скорости движущегося объекта и длины хорды, если движущийся объект находится на найденной хорде.
(е-1) вычисление остатка длины хорды с использованием расстояния до следующих интерполированных точек от последней согласованной с картой исходной точки;
(е-2) сравнение остатка длины хорды с дистанцией перемещения движущегося объекта, если вычисляют остаток длины хорды, установление нахождения движущегося объекта на соответствующей хорде, если остаток длины хорды больше или равен дистанции перемещения движущегося объекта, и установление нахождения движущегося объекта на другой хорде, если дистанция перемещения движущегося объекта больше остатка длины хорды;
(е-3) если движущийся объект находится на другой хорде, то вычитание остатка длины хорды из дистанции прямолинейного перемещения движущегося объекта, сравнение полученного в результате вычитания остатка дистанции прямолинейного перемещения с длиной другой хорды, и установление нахождения движущегося объекта на другой хорде.
долгота = долгота предыдущей интерполированной точки + скорость движущегося объекта · cos (расчетное направление хорды) · время (с), и
широта = широта предыдущей интерполированной точки + скорость движущегося объекта · sin (расчетное направление хорды) · время (с),
где расчетное направление хорды представляет собой взятый от направления точно на север угол наклона хорды.
| KR 100216535 В, 16.08.1999 | |||
| JP 2002213979 A, 31.07.2002 | |||
| US 5504482 A, 02.04.1996 | |||
| СПОСОБ КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ ГРУЗОВ | 1999 |
|
RU2157565C1 |

