Изобретение относится к области гидроакустики и может быть использовано в задачах определения класса объекта при разработке гидроакустических систем.
В системах, использующих методы классификации по анализу шумоизлучения морских объектов, используют признаки, основанные на особенностях спектрального состава сигнала, так называемого портрета (В.С. Бурдик. Анализ гидроакустических систем. Л,: Судостроение, 1988 г., стр. 322).
Известен способ классификации, описанный в работе В.В. Деева и др. Анализ информации оператором-гидроакустиком. Л.: Судостроение, 1990 г., стр. 110-111.
Способ содержит следующие операции:
- прием антенной сигналов шумоизлучения морского объекта в аддитивной смеси с помехой;
- выделение параметров сигнала шумоизлучения объекта из аддитивной смеси сигнала и помехи S(t)=A(t)+Y(t), где A(t) - мощность сигнала объекта, a Y(t) - мощность помехи (мешающий сигнал);
- деление исходной реализации сигнала S(t) на r отрезков длительности T;
- вычисление спектра Y(ωк) по каждому такому отрезку, т.е. дискретное преобразование Фурье (БПФ) реализации на отрезке конечной длительности T;
- накопление (усреднение) спектров по r реализациям - определение усредненной оценки Y′(ωк);
- усреднение полученной на предыдущем этапе спектрограммы Y′(ωк) по частотам с помощью прямоугольного окна - получение усредненной оценки Y″(ωк);
- определение порога обнаружения α по правилу Неймана-Пирсона при задаваемой вероятности ложного обнаружения Рл;
- нахождение отношения усредненных оценок Y′(ωк) и Y″(ωк) и сравнение с пороговым значением α. Превышение порога обнаружения свидетельствует о наличии дискретной составляющей на данной частоте.
Информация о дискретных составляющих используется при решении задач распознавания (классификации) в качестве одного из основных признаков сигналов шумоизлучения различных объектов.
Недостатком этого способа является то, что в нем не учитывается спектр собственной помехи корабля-носителя, непосредственно воздействующий на антенны гидроакустических средств, размещенных на объекте. Поэтому при наблюдении за целью принимается сигнал шумоизлучения в том числе и на фоне собственной помехи.
По своему значению для гидроакустического наблюдения шумовое поле корабля подразделяется на дальнее (внешнее) шумовое поле носителя, характеризующее шумящий объект как источник акустического сигнала для шумопеленгования противника и определения класса объекта, и ходовую помеху - ближнее (собственное) шумовое поле носителя (А.В. Богородский, Д.Б. Островский. Гидроакустические навигационные и поисково-обследовательские средства, изд. СПб. ГЭТУ «ЛЭТИ», 2009 г., стр. 231-232).
Гидроакустической антенной сигнал цели (дальнее поле) приниматься на фоне собственной помехи корабля-носителя. Уровень собственной помехи складываться с уровнем обнаруженной цели и вносит дискретные составляющие носителя в спектр принятого шумоизлучения объекта, что искажает результаты классификации объекта.
Задачей изобретения является повышение вероятности правильной классификации шумоизлучения морского объекта.
Технический результат изобретения заключается в обеспечении достоверного определения классификационных признаков сигналов шумоизлучения.
Для обеспечения указанного технического результата в способ классификации гидроакустических сигналов шумоизлучения морского объекта, содержащий прием антенной сигналов шумоизлучения морского объекта в аддитивной смеси с помехой, обработку принятого сигнала, включающую преобразование сигнала в цифровой вид, спектральную обработку принятых сигналов, накопление полученных спектров мощности S(ωk)2, определение порога обнаружения и при превышении порога обнаружения текущего спектра на данной частоте принятии решения о наличии дискретной составляющей, по которой классифицируют морской объект, введены новые признаки, а именно: до начала эксплуатации корабля-носителя создают базу «спектральных портретов» собственных помех корабля-носителя в зависимости от скорости носителя для заданных скоростей. Для записи спектральных портретов носителя сигналы с приемных каналов антенны преобразуют в цифровой вид, проводят спектральную обработку, включающую формирование статического веера характеристик направленности (ХН). После накопления полученных спектров мощности S(ωk)2 для фиксированного значения скорости по всем направлениям статического веера ХН спектры мощности  записывают в базу. В режиме обнаружения и классификации для выбранного направления на морской объект в базе «спектральных портретов» по собственной скорости Vсоб и № ХН статического веера, соответствующей направлению на морской объект, находят «спектральный портрет» собственных помех
записывают в базу. В режиме обнаружения и классификации для выбранного направления на морской объект в базе «спектральных портретов» по собственной скорости Vсоб и № ХН статического веера, соответствующей направлению на морской объект, находят «спектральный портрет» собственных помех  , спектр мощности шумоизлучения морского объекта G(ωk)2 определяют как
, спектр мощности шумоизлучения морского объекта G(ωk)2 определяют как  и при превышении порога обнаружения частотами спектра мощности G(ωk)2 классификацию морского объекта производят по дискретным составляющим спектра мощности G(ωk)2.
и при превышении порога обнаружения частотами спектра мощности G(ωk)2 классификацию морского объекта производят по дискретным составляющим спектра мощности G(ωk)2.
Сущность изобретения заключается в следующем.
Заметный вклад в собственный шум корабля-носителя вносят как машины и механизмы, так и гребные винты. Шум, создаваемый корабельными машинами, проявляется главным образом на низких частотах в виде тональных составляющих в общем спектре помех. На малых скоростях хода, когда уровень других видов шума невелик, вспомогательные механизмы корабля часто могут являться источником собственного шума, причиняющим наибольшие неприятности (Роберт Дж. Урик. Основы гидроакустики, изд. Судостроение, Л., 1978, стр. 373-375).
Для классификации целей важно учитывать не только уровень собственных помех, воспринимаемый корабельными гидроакустическими станциями, но и особенности спектра помехи, зависящего как от скорости движения, так и от характеристики направленности шумов. Предложенный способ позволяет из спектра сигнала объекта вычесть спектр собственной помехи на скорости носителя и соответствующего направления взятого из банка «спектральных портретов» носителя.
Таким образом, уменьшение влияния уровня собственных акустических помех способствует повышению эффективности гидроакустического наблюдения объекта, так как при этом оказывается возможным регистрировать более слабые сигналы при отсутствии мешающих собственных дискретных составляющих.
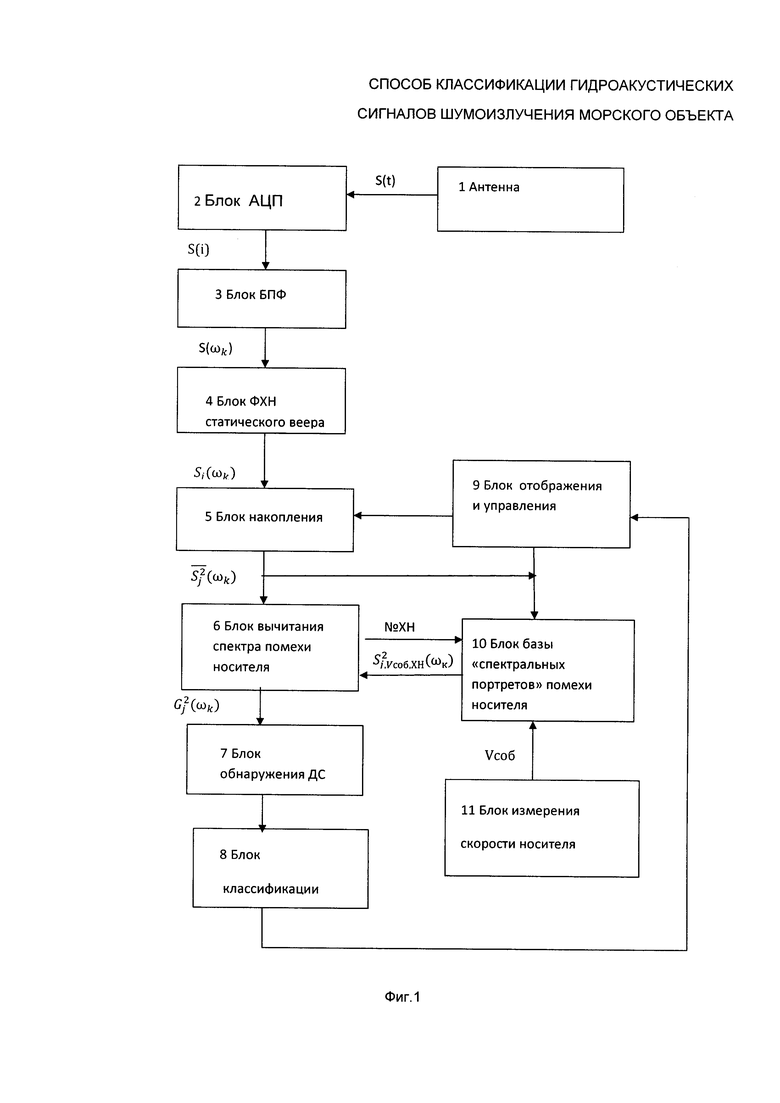
Сущность изобретения поясняется фиг.1, где приведена блок-схема устройства, реализующего способ.
Устройство, реализующее способ, содержит гидроакустическую антенну 1, которая соединена через блок 2 аналого-цифрового преобразования (АЦП) и блок 3 БПФ с блоком 4 формирования характеристик направленности (ФХН) статического веера, выход блока 4 соединен с входом блока 5 накопления. Выход блока 5 соединен с блоком 9 отображения и управления. В блок 10 базы «спектральных портретов» помехи носителя по команде управления «создание базы» из блока 9 отображения и управления поступает сигнал с выхода блока 5 и с выхода блока 11 измерения скорости носителя.
По команде управления «режим обнаружения» блока 9 сигнал с выхода блока 5 поступает на вход блока 6 вычитания спектра помехи носителя, который соединен с блоком 10 базы «спектральных портретов» носителя. Выход блока 6 соединен с входом блока 7 обнаружения дискретных составляющих (ДС). Выход блока 7 соединен со входом блока 8 классификации. Выход блока 8 соединен с входом блока 9 системы отображения и управления.
Блок 2 может быть выполнен так, как это описано в справочнике «Цифровая обработка сигналов», изд. Радио и связь, 1985 г., стр. 91. Блоки 3 и 4 могут быть реализованы, как описано в книге Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. «Корабельная гидроакустика», Санкт-Петербург: Наука, 2004 г., стр. 248-250. Блок 5 описан, например, в книге А.А. Харкевича «Борьба с помехой», изд. Наука, Москва, 1965 г., стр. 70-71. Блок 9 может быть выполнен так, как описано в книге Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. «Корабельная гидроакустика», Санкт-Петербург: Наука, 2004 г., стр. 255-261.
Блок 11 измерения скорости носителя может быть выполнен так, как это описано в книге А.В. Богородский и др. Гидрометеоиздат, Л., 1984. Гидроакустическая техника исследования и освоения океана, стр. 127.
Реализацию способа целесообразно описать на примере работы устройства (фиг.1).
Сигналы Si(t) приемных каналов антенны с выхода блока 1 поступают на вход блока 2 АЦП, сигнал Si(k) из АЦП в виде дискретных отсчетов поступают соответственно в блок 3 БПФ для получения комплексных спектров Si(ωк) для каждого элемента антенны. В блок 4 ФХН из блока 3 поступает отсчеты реализации комплексного спектра сигнала для каждого элемента антенны для формирования характеристик направленности статического веера, а с выхода блока 4 ФХН статического веера в блок 5 накопления поступают спектры Sj(ωк) с веера характеристик направленности. В блоке 5 накопления спектров определяется усредненный (накопленный) спектр мощности  .
.
В блок 10 базы «спектральных портретов» по команде управления «создание базы» блока 9 системы отображения и управления с выхода блока 5 поступают спектры мощности по всем характеристикам направленности (ХН), и с выхода блока 11 измерения скорости носителя поступает скорость носителя (Vнос.)
Блок 10 базы «спектральных портретов» собственных помех носителя, может быть реализован на основе современной универсальной ЭВМ, обладающей способностью работать в реальном времени, возможностью перехода с одной задачи на другую, наличием гибкой адресации к памяти, большой скоростью обработки данных (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника, СПб., изд. «Наука», 2004 г., стр. 284).
База «спектральных портретов» помехи носителя заполняется с выхода статического веера характеристик направленности при проведении испытаний до начала эксплуатации корабля-носителя для различных скоростей и при отсутствии мешающих объектов.
По команде управления «режим обнаружения» блока 9 сигнал с выхода блока 5 поступает на вход блока 6 вычитания спектра помехи носителя спектр мощности  с направления на морской объект, а из блока 10 базы «спектральных портретов» поступает «спектральный портрет»
с направления на морской объект, а из блока 10 базы «спектральных портретов» поступает «спектральный портрет»  собственной помехи носителя по направлению объекта и скорости носителя (блок 11). Вычисляется разностный спектр мощности (спектр сигнала объекта):
собственной помехи носителя по направлению объекта и скорости носителя (блок 11). Вычисляется разностный спектр мощности (спектр сигнала объекта):  . Разностный спектр мощности передается в блок 7 обнаружения дискретных составляющих для выработки порога обнаружения (A.M. Тюрин. Введение в теорию статистических методов в гидроакустике, изд. Л., 1963 г., стр. 127-128). Все превысившие порог дискретные составляющие передаются в блок 8 классификации для выработки классификационных признаков по спектру сигнала. Результаты классификации по спектральным признакам передаются в блок 9 системы отображения и управления.
. Разностный спектр мощности передается в блок 7 обнаружения дискретных составляющих для выработки порога обнаружения (A.M. Тюрин. Введение в теорию статистических методов в гидроакустике, изд. Л., 1963 г., стр. 127-128). Все превысившие порог дискретные составляющие передаются в блок 8 классификации для выработки классификационных признаков по спектру сигнала. Результаты классификации по спектральным признакам передаются в блок 9 системы отображения и управления.
Таким образом, технический результат, заключающийся в устранении влияния спектра собственной помехи корабля-носителя и обеспечении правильного определения классификационных спектральных признаков объекта, достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ классификации шумоизлучения морского объекта | 2021 |
|
RU2776958C1 |
| Способ обнаружения и классификации гидроакустических сигналов шумоизлучения морского объекта | 2019 |
|
RU2726291C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2020 |
|
RU2759498C1 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2013 |
|
RU2546851C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2736188C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морской цели | 2023 |
|
RU2810699C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2733938C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морских объектов | 2018 |
|
RU2711406C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2022 |
|
RU2801677C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2020 |
|
RU2754602C1 |
Изобретение относится к области гидроакустики и может быть использовано в задачах определения класса объекта при разработке гидроакустических систем. Технический результат изобретения заключается в обеспечении достоверного определения спектральных классификационных признаков сигналов шумоизлучения. Результат достигается тем, что в предложенном способе при обнаружении и классификации морского объекта обеспечивается устранение влияния спектра собственной помехи корабля-носителя, непосредственно воздействующей на антенны гидроакустических средств, размещенных на объекте, и таким образом обеспечивается правильное определение классификационных спектральных признаков. 1 ил.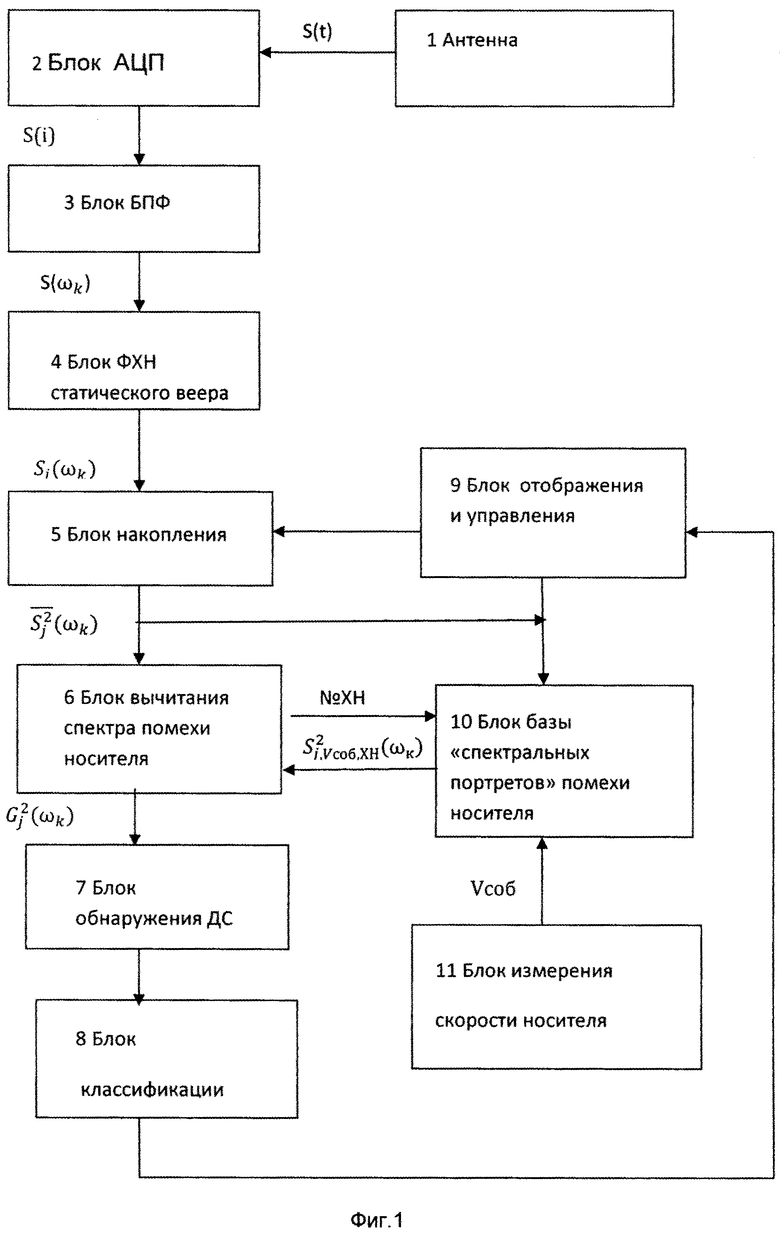
Способ классификации гидроакустических сигналов шумоизлучения морского объекта, содержащий прием антенной сигналов шумоизлучения морского объекта в аддитивной смеси с помехой, обработку принятого сигнала, включающую преобразование сигнала в цифровой вид, спектральную обработку принятых сигналов, накопление полученных спектров мощности S(ωk)2, определение порога обнаружения и при превышении порога обнаружения текущего спектра на данной частоте принятии решения о наличии дискретной составляющей, по которой классифицируют морской объект, отличающийся тем, что до начала эксплуатации корабля-носителя создают базу «спектральных портретов» собственных помех корабля-носителя в зависимости от скорости носителя для заданных скоростей, для записи спектральных портретов сигналы с приемных каналов антенны преобразуют в цифровой вид, проводят спектральную обработку, включающую формирование статического веера характеристик направленности (ХН), после накопления полученных спектров мощности S(ωk)2 для фиксированного значения скорости по всем направлениям статического веера ХН спектры мощности  записывают в базу спектральных портретов, в режиме обнаружения и классификации для выбранного направления на морской объект в банке «спектральных портретов» по собственной скорости Vcоб. и № ХН статического веера, соответствующей направлению на морской объект, находят «спектральный портрет» собственных помех
записывают в базу спектральных портретов, в режиме обнаружения и классификации для выбранного направления на морской объект в банке «спектральных портретов» по собственной скорости Vcоб. и № ХН статического веера, соответствующей направлению на морской объект, находят «спектральный портрет» собственных помех  , спектр мощности шумоизлучения морского объекта G(ωk)2 определяют как
, спектр мощности шумоизлучения морского объекта G(ωk)2 определяют как  и при превышении порога обнаружения частотами спектра мощности G(ωk)2 классификацию морского объекта производят по дискретным составляющим спектра мощности G(ωk)2.
и при превышении порога обнаружения частотами спектра мощности G(ωk)2 классификацию морского объекта производят по дискретным составляющим спектра мощности G(ωk)2.
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ, ДВИЖУЩИХСЯ С МАЛОЙ РАДИАЛЬНОЙ СКОРОСТЬЮ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ, И ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2002 |
|
RU2242021C2 |
| СПОСОБ СОВМЕСТНОЙ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА И ЕГО ШУМНОСТИ | 2014 |
|
RU2548400C1 |
| СИСТЕМА АКТИВНОЙ ГИДРОЛОКАЦИИ ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ | 2009 |
|
RU2393503C1 |
| Способ получения безуглеродистого феррохрома | 1959 |
|
SU137126A1 |
| СПОСОБ ОБРАБОТКИ ЭХОСИГНАЛА ГИДРОЛОКАТОРА | 2013 |
|
RU2528556C1 |
| US 8107320 B2, 31.01.2012. | |||

